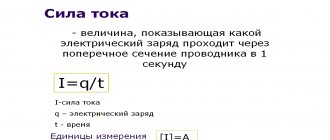
For the project we will need:
- analog current sensor ACS712;
- digital current sensor INA219;
- three-channel digital current sensor INA3221;
- Arduino UNO or other compatible board;
- any load, for example, a DC motor;
- connecting wires (for example, such a set of wires);
- bread board;
- personal computer with Arduino IDE development environment.
Current sensors, as their name suggests, measure current. There are sensors that are based on different physical effects and have different features. In particular, the ACS712 sensor under consideration is based on the Hall effect, the INA219 sensor includes an analog-to-digital converter (ADC), and the INA3221 sensor is three-channel. Let's look at them in order.
1Description of current sensor ACS712
The ACS712 current sensor is a sensor that is based on the Hall effect. The Hall effect is that when an electric current flows through a conductor placed in a magnetic field, a voltage arises in the conductor. This voltage serves as an indicator of current strength: it depends linearly on current strength. It also has a slight dependence on the ambient temperature and is influenced by external magnetic fields. So, for example, the graph below shows the dependence of the voltage at the output of the ACS712 sensor on the strength of the flowing current (for one of the types of sensor, more on that below) at different temperatures:
Dependence of voltage at the output of the ACS712 sensor on current strength
A module with an ACS712 sensor might look like this, for example:
Module with current sensor ACS712 and connection diagram
The ACS712 sensor has the following characteristics:
- works with direct and alternating current;
- current consumption – up to 13 mA;
- operating temperature -40…+85 °C.
There are several varieties of the ACS712 sensor, which differ in the amount of current measured. Thus, there are varieties with a maximum measured current of 5, 20 and 30 A. A wide range of measured current values can be attributed to the significant advantages of the ACS712 sensor. The listed modifications have a sensitivity of 185, 100 and 66 mV/A, respectively.
Application practice
Most often, these products are used as meters in current relay circuits, which control the operating modes of various electric drive equipment and protect it from extreme situations.
Current relays can protect any mechanical device from stalling or other overload conditions that result in a noticeable increase in load on the motor. Functionally, they detect current levels and produce an output signal when a specified value is reached. Such relays are used for:
- Signals from high-current conditions, for example, a coffee grinder filled to the brim with beans;
- Some low current conditions, such as running a pump when the water level is low.
To meet the demands of a diverse set of applications, modular sensor designs are now being used, including USB connectors, DIN rail mounting, and ring-type devices. This provides the following functions:
- Reliable operation in any operating modes;
- Possibility of using transformers;
- Adjustment of current parameters, which can be fixed or adjustable;
- Analog or digital output, including short circuit option;
- Various versions of power supplies.
As an example, consider a current sensor circuit to control the operation of a water pump that supplies water to a house.
Cavitation is a destructive condition caused by the presence of bubbles that form when a centrifugal pump or vertical turbine pump operates with low fluid levels. The resulting bubbles then burst, which leads to pitting corrosion and destruction of the pump control unit. A current relay prevents such a situation.
When the pump is operating normally and the fluid is completely blocking the pump inlet, the pump motor draws its rated operating current. If the water level decreases, the current consumption decreases. If the start button is pressed, the starter M and timer TD are activated simultaneously. The CD relay is set to maximum current, so its contact will not be closed when the engine is initially started. When the current drops below the set minimum, the relay is turned on, and, after the waiting time TD has expired, it is connected to its normally closed contact. Accordingly, the CR contacts open and de-energize the pump motor.
The use of such a detector eliminates the automatic restart of the pump, since the operator must ensure that the liquid level in front of the inlet is sufficient.
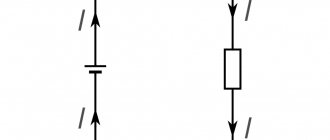
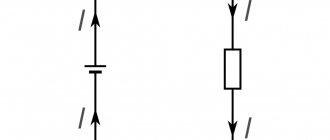
2Connecting the ACS712 current sensor to Arduino
As we remember from the school physics course, to measure current it is necessary to pass the current through a measuring device placed in the gap between the power source and the load. Accordingly, the sensor connection diagram is simple:
| ACS712 sensor output | Purpose |
| VCC | Power, 5 V |
| GND | Earth |
| OUT | Analog output of the sensor, the voltage on which linearly depends on the current flowing through the sensor |
| IP+ | Pin 1 for supplying measured current |
| IP | Pin 2 for supplying measured current |
The IP+ and IP- terminals are precisely the circuit break through which the current of interest needs to be passed. If you reverse the polarity, the measurements will have the opposite sign.
By the way, this feature - measuring current with both a positive and negative sign - allows the ACS712 sensor to be used for alternating current measurements.
Thus, to connect the ACS712 sensor to the Arduino board, 3 wires are used:
Connection diagram of the ACS712 current sensor to Arduino
We will connect the VOUT sensor output to any analog pin of the Arduino, for example, A0. We will use a DC motor as a load.
Module with ACS712 current sensor connected to Arduino, load – DC motor
Or, instead of a load, you can use a powerful incandescent lamp. Or any other load.
Module with ACS712 current sensor connected to Arduino, load – 10 W incandescent lamp
We will power the load from a laboratory current source, on which you can change the voltage and current.
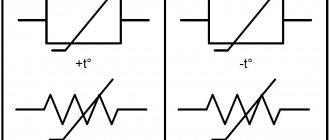
Microcircuits with Hall elements
Within this concept, two different methods of current control are possible. The first, more traditional option involves installing a microcircuit with a Hall element in a relatively thin non-magnetic gap, which is specially left near the ferromagnetic core covering the conductor with the measured current. Layout options for such a current sensor are shown in Figure 1.
Rice. 1. Current sensor with a Hall chip installed in a non-magnetic gap of the core located around the conductor
Important features of these sensors:
- a ferromagnetic core is fundamentally required, enclosing a conductor with a controlled current;
- the non-magnetic gap is relatively small (2...5 mm), does not depend on the range of measured currents (except for cases of very large flowing current) and is determined mainly by the thickness of the microcircuit housing with a Hall element;
- the core ensures the concentration of the magnetic field of the measured current and, at the same time, screens the majority of parasitic magnetic fields, in particular, those induced by currents flowing through other conductors;
- the measured magnetic field in the core gap is directed perpendicular to the chip surface;
- magnetic induction in the gap (in the area where the Hall element is installed) is almost independent of the lateral displacement of the microcircuit, but, on the other hand, it depends quite strongly on the thickness of the gap;
- the dimensions of the core are quite large (much larger than, for example, the dimensions of a magnetically sensitive microcircuit);
- it is difficult to install a sensor with a closed core on a conductor with the measured current;
- parasitic parameters of the ferromagnetic core: magnetic saturation, magnetic hysteresis, eddy currents during rapid magnetization reversal, temperature dependence of characteristics - fundamentally limit the achievable properties of the current sensor.
The main relationship that determines the sensitivity of current sensors with a female core is calculated by the formula:
B = 1.25×I/d
where B is the induction in the gap (perpendicular to the chip surface), mT;
I – measured current (if the core covers one conductor), A;
d – thickness of the non-magnetic gap, mm.
3Reading ACS712 Current Sensor Using Arduino
In the sketch we will constantly read the value from port A0 and output it to the serial data monitor. Let me remind you that the ADC of different Arduino boards has different bit depth, usually 10 or 12 bits. Read more here. This means that values from 0 to 210 = 1024 can come from the analog port for a 10-bit ADC. Let's assume that we have a current sensor, the measurement range of which is from -5 A to +5 A, and the sensitivity is 185 mV/A.
If there are 185 mV per 1 A, this corresponds to approximately 38 ADC units: 185 1024/5000 = 37.888, (1) where 5000 is the maximum voltage value that the Arduino ADC can measure, in millivolts.
At the OUT output of the ACS712 sensor, in the absence of the measured current, there should be half the supply voltage, i.e. 2.5 V. Since the entire ADC scale lies in the range from 0 to 1024, then in the absence of a measured current we must read the number 512 from the Arduino analog port. This is the beginning of the reference scale. Let's denote it value_zero. The deviation of the current value_adc from the zero level up or down will show the current strength. Therefore, in order to calculate the current value in amperes from the ACS712 sensor, the difference
divide the zero level and the measured value from analog port A0 by 38. And to get the current in milliamps, you should multiply this value by 1000: I(mA) = (value_zero − value_adc) / 38 1000 (2)
Explanation of the principle of calculating current
In practice, the value at analog pin A0 will not be exactly 512. Therefore, to determine the reference point, we will add a primitive calibration to the sketch.
Calibration will consist of reading the value from analog port A0 a number of times in the absence of current on the ACS712 sensor, and averaging it. Naturally, the load must be turned off during calibration so that no current flows through the sensor. Sketch for measuring direct current with the ACS712 sensor (expandable) const int acs712_pin = A0; int zero; // zero level relative to which the current is measured, usually VCC/2 void setup() {
Serial.begin(9600);
calibrate(); } // determine the zero of the scale (before turning on the load) void calibrate(){
zero = 0;
int repeats = 10; for (int i=0; i int getCurrent(int adc) {
int delta = zero - adc; // deviation from zero scale float scale = 37.888; // how many ADC units are per 1 ampere, according to formula (1) int current = (int)delta*1000/scale; // count the current in mA and round to whole numbers, according to formula (2) return current; }
Let's upload the sketch and gradually begin to increase the voltage and current on the load. Let's wait for a while and then start reducing the current. As a result, we get something like this:
ACS712 sensor current output to serial monitor and its graph
As you can see, the analog signal is constantly “jumping”.
To avoid this, you should add anti-aliasing to your sketch. To do this, we will carry out several measurements in a row, and then take the arithmetic average of them as the actual value. At the same time, we will combine the initial calibration, because it works exactly the same way. Here's how the sketch will change as a result: Sketch for measuring direct current with an ACS712 sensor with smoothing const int acs712_pin = A0; int zero; // zero level relative to which the current is measured, usually VCC/2 void setup() {
Serial.begin(9600);
zero = getSmoothedValue(); // determine the zero of the scale (before turning on the load) Serial.print("Zero="); Serial.println(zero); } // gets the smoothed value from the Arduino ADC int getSmoothedValue(){
int value;
int repeats = 10; for (int i=0; i void loop() {
int sensorValue = getSmoothedValue(); // read the value from the ADC and output it to the monitor Serial.print(sensorValue); Serial.print(" = "); int c = getCurrent (sensorValue); // convert to a current value and output to the monitor Serial.print(c); Serial.println(" mA"); delay(100); } // calculates the current in mA from the value from the ADC
int getCurrent(int adc) {
int delta = zero - adc; // deviation from zero scale float scale = 37.888; // how many ADC units are per 1 ampere int current = (int)delta*1000/scale; // count the current in mA return current ; }
By the way, it is advisable to put the sensitivity of the ACS712 sensor into a constant at the beginning of the sketch so that you can quickly change the sketch to modify the sensor with a different measurement range.
The result of this sketch is a much nicer picture:
Smoothed graph of current measured by ACS712 sensor
The same principle is incorporated into the Arduino libraries that operate with the ACS712 current sensor. For example, this Troyka Current .
Based on the results of the experiment, it turns out that the ACS712 sensor is very simple, but at the same time quite inaccurate. Much more accurate is the current sensor, which we will look at in the next section.
Demonstration projects of planar current sensors from Melexis
To speed up the design of planar current sensors and ensure that they achieve sufficiently high performance, Melexis offers users standard designs for a wide variety of measured current ranges:
- For measuring small currents of 2...10 A flowing through the conductors of a printed circuit board. At the same time, solutions are demonstrated with multi-turn coils (3 or 6 turns), flown by a controlled current without the use of a magnetic screen, or with a fairly simple U-shaped screen, depending on the requirements for the sensitivity and accuracy of the sensors. As an alternative, a design with one turn of current and a more complex C-shaped screen is proposed, which provides a high field concentration on the chip. At the same time, the user is introduced to different options for installing a C-shaped screen on the board.
- For measuring currents on a printed circuit board in the range of 10...50 A. A single conductor (turn) is used with or without a U-shaped screen. Accordingly, a planar sensor gain of 170 or 60 mV/A is achieved.
- For direct installation of a PCB with MLX91206 HF version chip on a 12x2 mm flat copper bus bar and use of a U-shaped shield. When measuring currents up to ±250 A, the nonlinearity of the transfer characteristic does not exceed 1.5 A. Despite the simplicity and low cost of such a sensor, it provides high resistance to parasitic magnetic fields, mechanical vibrations and displacements of the microcircuit.
- For direct installation on a current bus and measurements in the range of 300...700 A. The sensor is shown in Figure 7. It provides non-linearity of less than 5 A in the range of measured currents ±650 A.
- An example of dual-band development. On the same current bus there is a planar sensor for ±5 A (C-shaped screen-hub, slope 400 mV/A with an error within 20...25 mA) and a sensor for ±200 A (U-shaped screen, slope 10 mV/A with an error within 200 mA). Due to the compactness of the sensors, there are no problems with their placement on the bus, and the high overload capacity of the measured current ensures joint operation in an exceptionally wide range with high relative accuracy at low currents.
- Planar current sensors 10…100 A for round cables.
Rice. 11. Planar current sensor ±2 A with a multi-turn coil of the measured current and an external magnetic shield
To measure very low currents (up to ±2 A), multi-turn coils can be used, made on an insulated frame and flowing around a controlled current. By choosing the proper number of turns in combination with the relative position of the coil and the chip, optimal sensitivity (full use of the dynamic range of the sensor at a given maximum current value) can be achieved. The high dielectric strength of the frame makes it possible to design sensors with a high permissible voltage between the measured current circuit and the output signal of the microcircuit. If necessary, such a sensor can have an external magnetic shield to improve sensitivity and protect against stray magnetic fields (Figure 11).
To test the performance of planar current sensors, Melexis produces the DVK91206 demo kit. It contains three PCB options that the MLX91206 can be soldered onto. The boards allow you to select a different number of turns through which current flows. The set also includes seven MLX91206 chips with different sensitivity options (see notes on Table 1) and three U-shaped screens. Taken together, the set allows you to implement a significant number of options for planar current sensors and study their characteristics.
4Description of current, voltage and power sensor INA219
The INA219 sensor is a digital current, voltage and power sensor. It can measure voltages from 0 to 26 volts and currents from 0 to 3.2 amperes. The sensor is powered with voltage from 3 to 5.5 V. There are modules that are completely ready for connection to Arduino. One such module is GY-219:
GY-219 module with INA219 current sensor: assignment of pins and parts
The INA219 sensor is available in two versions: A and B. The latter is characterized by increased accuracy and less error. The photo below is just a modification of INA219B.
GY-219 module with INA219 current sensor
The INA219 sensor has a 12-bit ADC, respectively, with a maximum measurement of ±3.2 A, a resolution of 0.8 mA is obtained. However, you can configure the sensor to reduce the current range measured to ±400 mA; in this case, the resolution of the sensor will increase to 0.1 mA. In this case, you can calibrate the sensor by writing calibration data to a special register. The measured current, voltage and capability data are stored in three corresponding registers. By the way, the INA219 sensor allows hardware filtering using 128 counts if the measured current has strong interference.
The INA219 sensor is configured and read using the I2C serial interface. Moreover, the address on the bus can be set using jumpers A0 and A1 on the module. Valid addresses:
- 0x40 (no jumpers);
- 0x41 (with jumper A0);
- 0x44 (with jumper A1);
- 0x45 (both jumpers are installed).
Accordingly, on one IIC bus you can have up to 4 such sensors connected simultaneously.
For modern chargers: Texas Instruments current sensors
The so-called fast battery charging involves precise regulation of the charging current. And for this we need specialized current sensor microcircuits based on current shunt signal amplifiers. A line of such microcircuits is offered by Texas Instruments.
Battery-powered devices are becoming an integral part of our lives, so developers have to increasingly pay attention to the problems associated with fast charging of these devices. Over the past few years, new approaches to solving the problem of long battery charging times have emerged, allowing users to fully charge their devices in minutes rather than the previous hours. Let's look at the trends in fast charging systems, paying special attention to the problem of precise control of direct current to implement a safe and cost-effective fast charging device.
5Connecting the INA219 current and voltage sensor to Arduino
To begin with, let's take the simple route: download the ready-made library, load it into Arduino and look at the result. There are several libraries for working with our sensor. I suggest using this popular library for INA219 from Adafruit. Let's download it, install it in the standard way and upload the sketch from the getcurrent examples to Arduino.
If the sketch does not compile, and the error messages contain some missing components (for example, Adafruit_I2CDevice.h or Adafruit_BusIO_Register.h), then you need to install them. The easiest way to do this is this way. This method requires an Internet connection on the computer where you are running development environment.Open the library manager in the Arduino IDE: in the Tools Manage Libraries... menu. The Library Manager window will open. In the search field, enter adafruit busio ... When the library is detected and appears in the list, click the Install button.
Installing missing libraries through the Arduino IDE library manager
Let's connect the GY-219 module to Arduino according to the following diagram. The SDA and SCL of the sensor can be connected either to the analog inputs A4 and A5 of the Arduino, or to dedicated SDA and SCL ports (if your board has them).
Connection diagram of the INA219 sensor to Arduino
The load can be any source, for example, an electric motor, a lamp, or simply a powerful resistor. I have 5 5-watt 16-ohm resistors connected in parallel. Any of your existing sources can also serve as a power source. I will be using a lab power supply.
INA219 sensor connected to Arduino
The result of running the sketch will be the following output:
The result of the “GetCurrent” sketch for the INA219 current sensor
Great! Everything is working! As they say, take it and use it.
This library also allows you to calibrate the INA219 sensor if necessary. Details are in the description of the library and in the source code itself (a large number of explanations are given in the Adafruit_INA219.cpp file of the library).
DIY current sensor
If for some reason it is impossible to purchase a standard sensor (the best known designs are from the Arduino brand), you can make the device yourself.
Arduino current sensor. The arrow indicates the USB connector.
Required components:
- Op amp LM741, or any other that could act as a voltage comparator.
- Resistor 1 kOhm.
- Resistor 470 Ohm.
- Light-emitting diode.
A general view of the assembled device, made by yourself, is shown in the following figure. This circuit uses the Hall effect, when the control potential difference can change when the location of the conductor in the electromagnetic field changes.
6How to read INA219 current and voltage transmitter data
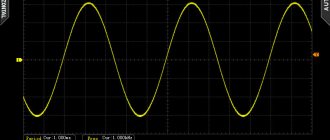
If you look at the data exchange on the I2C bus that occurs when this sketch is running (using a logic analyzer, of course), we will see the following.
Oscillogram of reading the registers of the INA219 sensor
To understand what's going on here, you need to look at the register map of the INA219 sensor.
The sensor contains only 6 registers. All registers are 16-bit. INA219 Current and Voltage Sensor Register Map
| Register address | Register name | Purpose of the register | Type |
| 0x00 | Configuration | Reset all registers, adjust measurement range, PGA gain, ADC resolution and filtering. | Read/Write |
| 0x01 | Shunt voltage | Stores the measured voltage value across a 0.1 ohm shunt resistor. | Reading |
| 0x02 | Bus voltage | Stores the measured bus voltage value. | Reading |
| 0x03 | Power | Stores the measured power value. | Reading |
| 0x04 | Current | Contains the value of the current flowing through the shunt resistor. | Reading |
| 0x05 | Calibration | Calibration register. Sets the measurement range and allows system calibration. | Read/Write |
To exchange with the module, we will use a debug board with an FT2232H chip and the SPI via FTDI program. It will be easier than using Arduino, because... To make changes for experimental purposes, you will not have to reprogram the ROM each time, but it will be possible to make changes to the transmitted commands on the fly. Let's connect the sensor to the 3.3 V power supply and to ground, taken from the Arduino. And we will connect the SCL and SDA pins to the ADBUS0 and ADBUS1+ADBUS2 pins of the board with the FTDI chip, respectively.
Reading INA219 Current Sensor Registers Using FT2232H
Let’s launch the SPI via FTDI program and select the I2C interface in the “Device” menu. Let's connect to port A. Let's scan devices on the I2C bus. The program will find the device at address 64 (0x40), unless of course you changed the address with jumpers A0 and A1. Let's select this device. In the “Reading” section, set the buffer size to 2 bytes, write the command 00 and click the “Read” button. The read data will be in a table, which opens by clicking on the button with the table icon. This is what we will see.
Reading registers of the INA219 current sensor using FT2232H and the “SPI via FTDI” program
As you probably already guessed, the “0” command means the address of the register from which we want to read data. And the number 0x399F is the data in register zero (configuration register). And this corresponds to the documentation, because. After turning on and booting, the INA219 chip has exactly this default configuration. This is the structure of the configuration register.
Structure of the INA219 current sensor configuration register
The INA219 sensor configuration register contains the following parts:
- RST (reset) – reset;
- BRNG (bus voltage range) – bus measurement range;
- BADC (bus ADC resolution/averaging) – resolution of the bus ADC;
- SADC (shunt ADC resolution/averaging) – resolution of the shunt ADC;
- MODE – mode;
- PG – PGA gain and range.
0x399F in binary is "001_11_0011_0011_111". Therefore, the default values after enabling are as follows.
- BRNG is equal to "1", which means the measurement range is 32 volts FSR;
- PG is equal to “11”: sets the range to ±320 mV and the gain to 8;
- BADC, SADC are equal to “0011”: the maximum resolution of the ADC is 12 bits;
- MODE equal to “111” means continuous operation, both the shunt and the bus are turned on.
To read other registers, you must first also write their address in the “Read” “Command” field, and then read 2 bytes. Or you can write the register number in the Write Command field and then just read (without specifying the register address in the read command).
Unfortunately, sequential reading of all registers of the INA219 microcircuit “in one pass” is not provided.
Let's return to our oscillogram. We see 6 reading cycles on it (each starts with a green dot ● and ends with a dark red dot ●). First we read the register with the shunt voltage Vshunt. (address 0x01), which stores the value 0x1957. Next, we read the value of the Vbus bus voltage register (0x02), in which the value is 0x19BA. Next we read the calibration register Cal (0x05) with the value 0x1000. Then the shunt current register Ishunt. (0x04), in which the value is 0x1959. Then we read the calibration register Cal (0x05) again. Finally, we read the power register Pwr (0x03), which contains the value 0x042B. The serial port monitor shows the following:
Port monitor output at the time of taking an oscillogram from the INA219 sensor
Let's look at how to bring data in registers “into human form.” We are not interested in all values, but only in voltage and current. Plus a calibration register, which plays the role of a correction factor.
Shunt Voltage register (address 0x01) of the INA219 sensor
The voltage on the shunt is equal to the value written in the register, divided by 100: Ushunt = Shunt_voltage/100 = 0x1957/100 = 64.87 (mV) For cases where the voltage is negative, the calculation is somewhat more complicated. This can be found in the technical description (datasheet).
Bus Voltage register (address 0x02) of the INA219 sensor
Let's start with the register in which the bus voltage is recorded, because it's the simplest. Currently the data in it is 0x19BA. According to the same technical description (datasheet on INA219), to convert the value to millivolts, you need to do the following: Ubus = (0x19BA >> 3) × 32000 (mV) / 8000 = 3292 (mV).
Here 0x19BA is the value in the register. It needs to be shifted 3 digits to the right, because Voltage data is stored starting from the 3rd digit. 32000 (mV) is the limit of the measurement scale (it is indicated in the configuration register). And 8000 is the limit of the measurement scale in counts. It turns out 3292 (mV) or 3.29 volts, which is what we see in the output of the sketch in the Arduino port monitor.
Current Register (address 0x04) of the INA219 sensor
The current value is also easy to calculate: I = 0x1959 × 0x1000 / 4096 = 6489.
The value in the shunt voltage register 0x1959 is multiplied by the value of the calibration register, which in our case is 0x1000. And then the result is divided by 4096 (which, by the way, is the same as 0x1000). That is, the current is equal to 6489. But in what units? To answer this question, you need to define the Current_LSB parameter: Current_LSB = 0.04096 / 0x1000 / 0.1 (Ohm) = 0.0001 Here 0x1000 is the value of the calibration register, 0.1 (Ohm) is the shunt resistance, and 0.04096 is just a coefficient. Now the calculated current needs to be multiplied by the number Current_LSB, and we get 0.6489 (A) or 648.90 (mA). We see such a current in the monitor.
Power register (address 0x03) of the INA219 sensor
Power is calculated as the product of bus voltage and current: P = Ubus × I = 3292 (mV) × 648.9 (mA) = 2136 (mW)
The slight discrepancy with the Arduino monitor output is due to a rounding error. Namely, if we look at the output of the port monitor, we will see that the voltage value on the bus is assumed to be 3.29 V, while the register is written at 3.292 V. Because of this, the calculated value is 2 milliwatts larger than that shown in the output of the sketch.
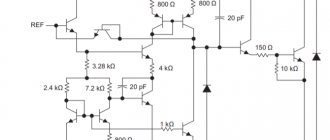
Texas Instruments Current Shunt Amplifier Family
Figure 8 shows the main options for current measurement circuits using specialized chips manufactured by TI, and Table 2 shows their comparative characteristics.
Rice. 8. Basic options for constructing current measurement circuits based on specialized TI microcircuits
Table 2. TI's major series of custom current shunt signal amplifiers
| Measuring current in the power bus at the output of the network adapter | |||||||
| Name | Common mode voltage range, V | Bias voltage, µV | Temperature drift of bias voltage, µV/°C | Gain | Gain error, % | Temperature drift of gain error, ppm/°C | Note |
| INA240 | -4…80 | 25 | 0,25 | 20, 50, 100, 200 | 0,2 | 2,5 | PWM suppression |
| INA210 | -0,3…26 | 35, 60, 100 | 0,1 | 50, 75, 100, 200, 500 | 0,9 | 10 | Improved performance |
| INA300 | 0…36 | 650 | 0,1 | – | – | – | Comparator only |
| INA301 | 0…36 | 35 | 0,1 | 20, 50, 100 | 0,10 | 10 | Fast comparator |
| Load bus current measurement | |||||||
| Name | Common mode voltage range, V | Bias voltage, µV | Temperature drift of bias voltage, µV/°C | Gain | Gain error, % | Temperature drift of gain error, ppm/°C | Note |
| INA240 | -4…80 | 25 | 0,25 | 20, 50, 100, 200 | 0,2 | 2,5 | PWM suppression |
| INA210 | -0,3…26 | 35, 60, 100 | 0,1 | 50, 75, 100, 200, 500 | 0,9 | 10 | Improved performance |
| Ground bus current measurement | |||||||
| Name | Common mode voltage range, V | Bias voltage, µV | Temperature drift of bias voltage, µV/°C | Gain | Gain error, % | Temperature drift of gain error, ppm/°C | Note |
| INA210 | -0,3…26 | 35, 60, 100 | 0,1 | 50, 75, 100, 200, 500 | 0,9 | 10 | Improved performance |
| INA199 | -0,3…26 | 150 | 0,1 | 50, 100, 200 | 1,4 | 10 | Low cost |
| INA300 | 0…36 | 650 | 0,1 | – | – | – | Comparator only |
| INA301 | 0…36 | 35 | 0,1 | 20, 50, 100 | 0,1 | 10 | Fast comparator |
The main features of INA chips manufactured by Texas Instruments, used for precision current measurement in the power bus, in the ground bus, with an overcurrent protection function, as well as a built-in shunt, are shown in Table 3.
Table 3. Key Applications and Features of Texas Instruments INA Current Measurement ICs
| Name | Current measurement method | Peculiarities |
| INA210 | Precise power bus current measurement |
|
| INA240 |
| |
| INA199 | Precise ground bus current measurement |
|
| INA300 | Current measurement with overload protection function |
|
| INA301 |
| |
| INA250 (Figure 9) | Availability of built-in shunt |
|
|
Rice. 9. Block diagram of the INA250 precision analog current-voltage converter
Rice. 10. Block diagram of the INA260 precision digital monitor of supply voltage, current and load power