Independently excited motor
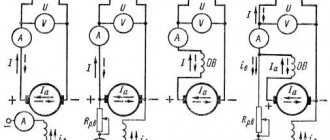
In a DPT with independent excitation, the excitation winding is connected to a separate power source (Fig. 1). This may be due to different excitation voltages Uв and armature circuit voltage U. With this connection diagram, the OB has no electrical connection with the armature winding. To reduce losses in the OF and create the necessary MMF, it is necessary to reduce the excitation current by increasing the number of turns. The field winding is made of a small number of turns, so that the current Iв is 2...5% of Iа. The choice of this excitation circuit for the motor depends on the properties of the electric drive.
Rice. 7. Circuit diagram for connecting a parallel-excited DC motor
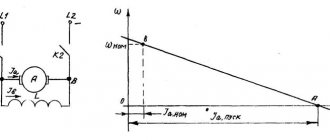
To construct a mechanical characteristic of a parallel-excitation motor, it is enough to have two of its points, since the characteristic has the form of a straight line (rectilinear).
In Fig. 8 shows the natural and artificial mechanical characteristics of a parallel-excitation DC motor.
Rice. 8. Mechanical characteristics of a DC motor with parallel excitation 1 - natural; 2 - artificial with different excitation flows; 3 - artificial at different voltages; 4 - artificial at different resistances in the armature circuit
Artificial mechanical characteristics obtained by changing the magnetic flux Ф or the supplied voltage U (Fig. 8, straight lines 2 and 3) are hard characteristics, and those obtained by changing the resistance of the armature circuit R are soft characteristics (Fig. 8, straight line 4) .
Reversing the rotation of a DC motor is accomplished by changing the direction of the current either in the armature winding or in the field winding. Switching the field winding is less common, since due to its inductance the braking time increases compared to switching the armature winding.
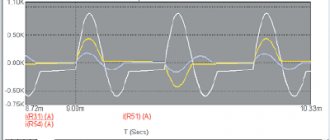
Speed and mechanical characteristics corresponding to the conditions of the problem are presented in Fig. 9.
Rice. 9. Natural and artificial speed (a) and mechanical (b) characteristics of a parallel-excitation motor (for example 2)
In modern electric drives, there is often a need to stop a production mechanism or change the direction of its movement. These operations can be carried out by switching the electric motor to the braking mode according to one of the mechanical characteristics corresponding to the selected method of electric braking. The mechanical characteristics of a parallel-excited motor for various operating modes are presented in Fig. 10.
Rice. 10. Mechanical characteristics of a parallel-excited motor under various operating modes
In this mode, the current and torque on the motor shaft are negative. The considered braking mode of operation of the electric motor is created automatically, without any switching in the normal circuit, if the excitation current increases or the motor rotation speed increases above the possible speed n0. In this case, the electric machine works as a generator, supplying electrical energy to the network. The braking torque developed by the machine is balanced by the driving torque applied to the shaft. This braking method is used in cranes and other installations when lowering loads. Generator braking in electric drives with frequent starts and stops is very economical, since it is accompanied by the release of electricity to the network.
Generator braking with energy release into the network.
The mechanical characteristics of the machine in the regenerative braking mode with energy output to the network are a natural continuation of the characteristics of the motor mode into the region of quadrant II (see Fig. 10).
Generator braking when the machine armature is shorted to resistance (dynamic braking).
The mechanical characteristics of the machine in the considered mode pass through the origin of coordinates, located in quadrant II (see Fig. 10), since at a positive value of the rotation speed the current and torque are negative in sign. The rigidity of the characteristics decreases with increasing resistance of the anchor chain. In dynamic braking mode, the machine operates as a generator due to the kinetic energy accumulated in the rotating inertial masses of the electric drive and production mechanism.
The engine switching circuit, which allows you to switch it to dynamic braking mode, is shown in Fig. 11. To perform braking, the motor armature must be disconnected from the network using contactor K and closed to resistance Rn using contactor KT. The excitation winding remains connected to the network in the same way as in motor mode. The motor armature, as already indicated, will continue to rotate due to the kinetic energy stored in the moving parts of the drive. The resulting e. d.s. it will cause a current in the armature circuit. Direction e. d.s. will remain the same as in motor mode, and the current and torque of the motor will change their direction. The engine will develop a braking torque directed against the movement. Under its influence, the engine and associated rotating parts of the mechanism will quickly stop.
Deflection braking. The mechanical characteristics of the engine in the mode under consideration are a continuation into quadrant IV of the mechanical characteristics of the motor mode (see Fig. 10).
The counter-switching mode occurs when the torque on the shaft from the load (in lifting mechanisms) is greater than the maximum torque that the electric motor can develop in propulsion mode. In this case, the load, under the influence of its weight, will begin to fall, which will lead to rotation of the electric motor in the direction opposite to that determined by the polarity of the applied voltage when the windings are turned on. The direction of the current remains unchanged, i.e., the same as in the motor mode; the engine torque also retains its sign, but in relation to the new steady motion it will be braking.
Rice. 11. Scheme for turning on the engine during dynamic braking
The amount of current in the back-on mode is greater than in the motor mode, therefore the amount of torque developed by the engine during back-on braking also increases.
The reverse mode is often used in electric drives to quickly change the direction of their rotation—reversing it.
The braking mode of the engine by back-on can also be used to quickly stop the production mechanism. To do this, you need to change the polarity of the voltage at the armature winding terminals. The diagram for turning on the engine during braking by counter-switching is shown in Fig. 12. Before switching to the back-off mode, the motor armature is connected to the network by a HF contactor. To perform braking, the motor armature is disconnected from the network by this contactor and reconnected to the network by the KN contactor. In this case, the polarity of the voltage on the armature winding and the direction of the current in it changes. The engine creates a braking torque and begins to stop. The armature current is limited in braking mode by including an additional resistance RB in the armature circuit. The motor is switched using contactors automatically, and the motor rotation speed remains virtually unchanged during the switching time.
Rice. 12. Scheme for turning on the engine during braking by counter-switching
It should be borne in mind that if the motor armature is not disconnected from the network at a speed close to zero, then, in accordance with the motor switching circuit, it will begin to run in the opposite direction.
During counter-braking, the engine not only converts kinetic energy stored in moving parts into electrical energy, but also consumes energy from the network. Energy is spent (lost) on heating the resistances in the armature circuit.
From the last equality it follows that there is a hyperbolic relationship between the torque of an electric motor with sequential excitation and its speed in the area of small loads (unsaturated magnetic circuit).
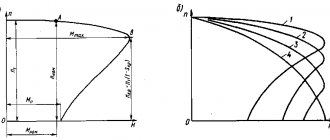
The mechanical characteristics of an electric motor with sequential excitation under various operating modes are shown in Fig. 14.
2. Electric motors with sequential excitation
In Fig. Figure 13 shows a circuit diagram for switching on a series excitation motor.
The equation for the speed characteristics of an electric motor with series excitation is the same as for an electric motor with parallel excitation.
Since the magnetic flux is proportional to the magnitude of the current, it is possible, by substituting the value from equality into the formula, to obtain, through transformations, the expression of the mechanical characteristics for a motor with series excitation:
Rice. 13. Switching circuit for a series-excited DC motor
Rice. 14. Mechanical characteristics of a motor with sequential excitation under various operating modes
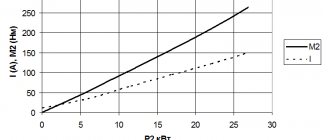
Analysis of the nature of the mechanical characteristics of an electric motor with sequential excitation allows us to draw the following conclusions: a) at loads below 20-25% of the rated value, operation of the electric motor on a natural characteristic is practically unacceptable due to an excessive increase in the armature rotation speed (Fig. 14, curve 1); b) with an increase in additional resistance in the armature circuit, the rigidity of the mechanical characteristic decreases and it shifts down (Fig. 14, curve 2); c) the mechanical characteristic curve is asymptotic, as follows from Fig. 14, approaches the ordinate axis without intersecting with it, from which it follows that by increasing the rotation speed it is impossible to transfer an electric motor with series excitation to a generator mode of operation with energy output to the network (as is possible with a machine with parallel excitation).
To brake a machine with sequential excitation, back-switching or dynamic braking is usually used.
When braking by counter-switching, the mechanical characteristics are a continuation of the characteristics of the motor mode into the region of negative speed. In this case, additional resistance is introduced into the motor circuit to limit the current. A motor with sequential excitation operates in back-to-back mode when the armature polarity changes. In the field winding, the direction of the current must remain unchanged.
During dynamic braking, the mechanical characteristics of the engine are located in quadrant II. The braking torque in dynamic braking mode during self-excitation decreases as the machine speed decreases.
Dynamic braking with independent excitation is more effective. In this case, the armature winding is disconnected from the network and closed to an external resistance, and the field winding is connected to the network through additional resistance. Since in the latter case the engine operates as a separately excited generator, its characteristics are similar to those of a parallel-excited engine under dynamic braking. These characteristics are straight and all intersect at the origin, having greater rigidity with less resistance.
Rice. 15. Scheme for switching on the engine in dynamic braking mode with independent power supply to the field winding from the network
In Fig. 15 shows a diagram of turning on the engine in dynamic braking mode with independent power supply of the excitation winding from the network,
DC motors, having a large starting torque and withstanding significant short-term overloads, have found wide application in the electric drive of large excavators. The disadvantages of using DC motors include the need to install AC-DC converters to power these motors.
DBT with mixed arousal
DPT with mixed excitation (Fig. 4) has two OBs, one of which is connected in series, and the other in parallel to the armature circuit. When the windings are connected in a consistent manner, as the load on the shaft increases, the magnetic flux increases, which leads to a decrease in the rotation speed. With a counter connection, the total magnetic flux decreases with increasing load, which leads to a sharp increase in rotation speed. This leads the engine to an unstable operating mode, so the series winding is made of a small number of turns so that when the load increases, the magnetic flux decreases slightly, thereby stabilizing the operation of the engine.
2.64 (14 Voices)
- Forward