Tachogenerator
(from ancient Greek τάχος - fastest, speed and generator) - a measuring generator of direct or alternating current, designed to convert the instantaneous value of the frequency (angular velocity) of shaft rotation into a proportional electrical signal.
The magnitude (EMF), and in some types of TG also the frequency, of the signal is directly proportional to the rotation speed.
The generated signal is supplied for direct display to a specially calibrated voltmeter (tachometer), or to the input of automatic control devices that monitor the rotation speed.
Operating principle
The action of the tachogenerator is based on the proportionality of the angular frequency of rotation of the generator rotor to its EMF at a constant value of the excitation flux.
Tachogenerators are divided into several types: alternating current (synchronous and asynchronous) and direct current.
Asynchronous AC tachogenerators
The design is similar to asynchronous electric motors with a hollow squirrel-cage rotor. On the stator of such a tachogenerator, two windings are located at an angle of 90°, one of which (the excitation winding) is powered by an alternating current of constant frequency and constant voltage, and the second is the output, and a measuring instrument (voltmeter, calibrated, for example, in rotation) can be connected to it. /min). Since the frequency of the output voltage does not depend on the rotor speed and is equal to the frequency of the voltage in the excitation coil, this type of tachogenerator is called asynchronous. And thanks to two independent coils, the ATG can not only display the rotation speed, but also determine the direction of rotation by changing the phase of the output signal by 180° when changing the direction of rotation.
Synchronous AC tachogenerators
Small brushless synchronous machines with a permanent magnet as the rotor and a coil as the stator. Such a tachogenerator converts the rotor rotation speed into an alternating voltage, the amplitude and frequency of which depends on the rotor rotation speed. However, this type of tachogenerator cannot indicate the direction of rotation, which can be a significant disadvantage. The STG rotor is most often made of a multi-pole permanent magnet, which is why there are several periods of the output signal per 1 revolution of the rotor. This type of tachogenerator has a long service life, since it does not have a commutator-brush assembly. Signal reading is possible in two ways: frequency and amplitude.
Frequency method for determining rotation speed
Since the frequency of the output signal does not depend on temperature, the decrease in magnetic flux caused by aging and the size of the gap between the rotor and stator of the tachogenerator, this method is one of the most accurate. The rotation speed is calculated by determining the frequency of the output signal and then calculating the rotor speed using the formula:
F_{rot} = \frac {F_{out}}{p}
Where Frot is the rotor rotation frequency in , Fout is the frequency of the signal at the tachogenerator output, p is the number of pole pairs of the tachogenerator rotor.
The disadvantage of this method is that it takes more time to determine the frequency more accurately, and during this time the frequency can change significantly. This means that the more time is spent accumulating pulses to determine the frequency, the greater the error in measurements, and the slower the control circuit compensates for an increase or decrease in rotation speed, which has a bad effect on the dynamics of the system as a whole. To reduce the error, an STG with a larger number of poles is used, which reduces the time for determining the output frequency, and hence the response time of the control circuit. The signal frequency can be determined from the accumulated and averaged periods of several pulses. The calculation is made using the formula:
F_{out} = \frac {N}{T_1+…+T_N} = \frac {N}{\sum_{i=1}^N T_i}
Where Fout is the signal frequency at the tachogenerator output, N is the number of accumulated pulses, T is the length of each period.
With this method of determining the rotation speed, it must be taken into account that the amplitude of the output signal also changes, which means that the input of the frequency detector must be designed for low- and high-voltage input signals, which in some cases can be a disadvantage due to the complexity of the circuit.
Amplitude method for determining rotation speed
This method of determining frequency is not very accurate due to the dependence on temperature, the gap between the rotor and the stator, changes in the magnetic flux of the rotor magnet during aging, as well as due to the influence of frequency modulation on the reactive elements of the circuit. But in a number of cases, this method justifies itself, compensating for the shortcomings with the simplicity of the control scheme. As the rotation speed increases, the EMF generated in the stator winding of the stator will increase. To take readings from the tachogenerator and bring them to a convenient form, a one- or two-half-wave rectifier and a low-pass filter that smoothes out ripples are used. The ratio of voltage to rotor speed is described by the “output voltage slope” parameter, usually represented in mV * RPM (millivolts per revolution per minute). Knowing this parameter, you can determine the rotor speed using the formula:
F_{rot} = \frac {U_{out}}{60S_t}
Where Frot is the rotor speed in , Uout is the output effective voltage from the tachogenerator, St is the slope of the output voltage in mV*RPM
DC tachogenerators
Small commutator machines in which the excitation flow is created by a permanent magnet or an independent winding. Due to the presence of a brush-commutator assembly, the resource of this type of tachogenerator is less than, for example, that of an AC STG, and due to switching between windings, additional noise is generated. Also, due to the fact that the DC TG signal varies in amplitude, it is accompanied by a number of problems that introduce nonlinearity into the readings, such as: dependence on temperature, resistance of the brush-collector junction, age of the stator magnet and the gap between the rotor and stator. The advantages of a DC TG are the convenient form of presentation of the output signal and the ability to determine not only the speed of rotation of the rotor, but also the direction of its rotation (in the case of reverse, the signal will be of negative polarity). The rotor rotation speed is determined only by an analog method - as the rotation speed increases, the EMF generated in the tachogenerator rotor windings will increase. The ratio of voltage to rotor speed is described by the “output voltage slope” parameter, usually represented in mV * RPM (millivolts per revolution per minute). Knowing this parameter, you can determine the rotor speed using the formula:
F_{rot} = \frac {U_{out}}{60S_t}
Where Frot is the rotor speed in , Uout is the output voltage from the tachogenerator, St is the slope of the output voltage in mV*RPM. The direction of rotation is determined by the sign of the result.
Constant automation schemes
So, we have already said that tachogenerators are used in automatic circuits, now let's take a closer look at how they are involved there.
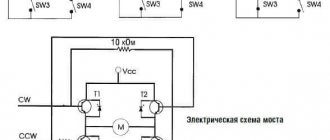
Direct current tachogenerator connection diagram
- Above is a schematic diagram of connecting a tachogenerator.
- The OB winding is connected to a DC source. In this case, the tachogenerator, coming into a state of excitation, and if its armature is set in motion with a certain frequency, it will begin to produce a constant voltage at the output.
- Moreover, the higher the device resistance Rh, the steeper the Cu characteristic at the output. The value of the greatest steepness will correspond to the idle mode of operation of the tachogenerator - this happens when the winding at the armature opens.
- Accordingly, with increasing load, the opposite phenomenon is observed.
- The tachogenerator outputs a current characteristic in the form of a constant line, but this corresponds to reality only at low rotation speeds. If you increase them, the characteristic will become curvilinear. If the load resistance RH decreases, the curvature effect will also increase.
- This is explained by the fact that the armature has a demagnetizing effect.
Advice! To prevent the generator from producing a curved output characteristic, you do not need to run it at the highest possible speed, and use only devices with low internal resistance as a load.
Structure of a synchronous tachogenerator
- It is also worth considering the point that in real conditions there is a voltage drop in the brushes, which is why the output characteristic does not come from the origin of coordinates, but with some displacement. This phenomenon is the reason for the appearance of a dead zone in tachogenerators, in which no voltage is created.
- To reduce the dead zone, brushes with low resistance are used, usually copper-graphite or silver-graphite. High-precision models use brushes with silver or gold tips. However, these devices still have some error, within 0.2-0.5%.
An excerpt characterizing the Tachogenerator
The officers wanted to take their leave, but Prince Andrei, as if not wanting to remain face to face with his friend, invited them to sit and drink tea. Benches and tea were served. The officers, not without surprise, looked at the thick, huge figure of Pierre and listened to his stories about Moscow and the disposition of our troops, which he managed to travel around. Prince Andrei was silent, and his face was so unpleasant that Pierre addressed himself more to the good-natured battalion commander Timokhin than to Bolkonsky. - So, did you understand the entire disposition of the troops? - Prince Andrei interrupted him. - Yes, that is, how? - said Pierre. “As a non-military person, I can’t say that I completely, but I still understood the general arrangement.” “Eh bien, vous etes plus avance que qui cela soit, [Well, you know more than anyone else.],” said Prince Andrei. - A! - Pierre said in bewilderment, looking through his glasses at Prince Andrei. - Well, what do you say about the appointment of Kutuzov? - he said. “I was very happy about this appointment, that’s all I know,” said Prince Andrei. - Well, tell me, what is your opinion about Barclay de Tolly? In Moscow, God knows what they said about him. How do you judge him? “Ask them,” said Prince Andrei, pointing to the officers. Pierre looked at him with a condescendingly questioning smile, with which everyone involuntarily turned to Timokhin. “They saw the light, your Excellency, as your Serene Highness did,” Timokhin said, timidly and constantly looking back at his regimental commander. - Why is this so? asked Pierre. - Yes, at least about firewood or feed, I’ll report to you. After all, we were retreating from the Sventsyans, don’t you dare touch a twig, or some hay, or anything. After all, we are leaving, he gets it, isn’t it, your Excellency? - he turned to his prince, - don’t you dare. In our regiment, two officers were put on trial for such matters. Well, as His Serene Highness did, it just became so about this. They saw the light... - So why did he forbid it? Timokhin looked around in confusion, not understanding how or what to answer such a question. Pierre turned to Prince Andrei with the same question. “And so as not to ruin the region that we left to the enemy,” said Prince Andrei with malicious mockery. – This is very thorough; The region must not be allowed to be plundered and the troops must not be accustomed to looting. Well, in Smolensk, he also correctly judged that the French could get around us and that they had more forces. But he couldn’t understand that,” Prince Andrei suddenly shouted in a thin voice, as if breaking out, “but he couldn’t understand that we fought there for the first time for Russian land, that there was such a spirit in the troops that I had never seen, that We fought off the French for two days in a row and that this success increased our strength tenfold. He ordered a retreat, and all efforts and losses were in vain. He didn’t think about betrayal, he tried to do everything as best as possible, he thought it over; but that’s why it’s no good. He is no good now precisely because he thinks everything over very thoroughly and carefully, as every German should. How can I tell you... Well, your father has a German footman, and he is an excellent footman and will satisfy all his needs better than you, and let him serve; but if your father is sick at the point of death, you will drive away the footman and with your unusual, clumsy hands you will begin to follow your father and calm him down better than a skilled but stranger. That's what they did with Barclay. While Russia was healthy, a stranger could serve her, and she had an excellent minister, but as soon as she was in danger; I need my own, dear person. And in your club they made up the idea that he was a traitor! The only thing they will do by slandering him as a traitor is that later, ashamed of their false accusation, they will suddenly make a hero or a genius out of the traitors, which will be even more unfair. He is an honest and very neat German... “However, they say he is a skilled commander,” said Pierre. “I don’t understand what a skilled commander means,” said Prince Andrey with mockery. “A skillful commander,” said Pierre, “well, the one who foresaw all the contingencies... well, guessed the thoughts of the enemy.” “Yes, this is impossible,” said Prince Andrei, as if about a long-decided matter. Pierre looked at him in surprise. “However,” he said, “they say that war is like a chess game.” “Yes,” said Prince Andrei, “only with this small difference that in chess you can think about every step as much as you like, that you are there outside the conditions of time, and with this difference that a knight is always stronger than a pawn and two pawns are always stronger.” one, and in war one battalion is sometimes stronger than a division, and sometimes weaker than a company. The relative strength of the troops cannot be known to anyone. Believe me,” he said, “if anything depended on the orders of the headquarters, I would have been there and made the orders, but instead I have the honor of serving here, in the regiment with these gentlemen, and I think that we really tomorrow will depend, not on them... Success has never depended and will not depend on position, weapons, or even numbers; and least of all from the position. - And from what? “From the feeling that is in me, in him,” he pointed to Timokhin, “in every soldier.” Prince Andrei looked at Timokhin, who looked at his commander in fear and bewilderment. In contrast to his previous restrained silence, Prince Andrei now seemed agitated. He apparently could not resist expressing those thoughts that unexpectedly came to him. – The battle will be won by the one who is determined to win it. Why did we lose the battle at Austerlitz? Our loss was almost equal to that of the French, but we told ourselves very early that we had lost the battle - and we lost. And we said this because we had no need to fight there: we wanted to leave the battlefield as quickly as possible. “If you lose, then run away!” - we ran. If we hadn’t said this until the evening, God knows what would have happened. And tomorrow we won’t say this. You say: our position, the left flank is weak, the right flank is stretched,” he continued, “all this is nonsense, there is none of this.” What do we have in store for tomorrow? A hundred million of the most varied contingencies that will be decided instantly by the fact that they or ours ran or will run, that they will kill this one, they will kill the other; and what is being done now is all fun. The fact is that those with whom you traveled in position not only do not contribute to the general course of affairs, but interfere with it. They are busy only with their own small interests. - At such a moment? - Pierre said reproachfully. “At such a moment,” repeated Prince Andrei, “for them it is only such a moment in which they can dig under the enemy and get an extra cross or ribbon.” For me, for tomorrow this is this: a hundred thousand Russian and a hundred thousand French troops agreed to fight, and the fact is that these two hundred thousand are fighting, and whoever fights the hardest and feels least sorry for himself will win. And if you want, I’ll tell you that, no matter what it is, no matter what is confused up there, we will win the battle tomorrow. Tomorrow, no matter what, we will win the battle! “Here, your Excellency, the truth, the true truth,” said Timokhin. - Why feel sorry for yourself now! The soldiers in my battalion, would you believe it, didn’t drink vodka: it’s not such a day, they say. - Everyone was silent. The officers stood up. Prince Andrei went out with them outside the barn, giving the last orders to the adjutant. When the officers left, Pierre approached Prince Andrei and was just about to start a conversation when the hooves of three horses clattered along the road not far from the barn, and, looking in this direction, Prince Andrei recognized Wolzogen and Clausewitz, accompanied by a Cossack. They drove close, continuing to talk, and Pierre and Andrey involuntarily heard the following phrases: “Der Krieg muss im Raum verlegt werden.” Der Ansicht kann ich nicht genug Preis geben, [War must be transferred to space. I cannot praise this view enough (German)] - said one. “O ja,” said another voice, “da der Zweck ist nur den Feind zu schwachen, so kann man gewiss nicht den Verlust der Privatpersonen in Achtung nehmen.” [Oh yes, since the goal is to weaken the enemy, the losses of private individuals cannot be taken into account (German)] - O ja, [Oh yes (German) ] - confirmed the first voice. “Yes, im Raum verlegen, [transfer into space (German)],” Prince Andrei repeated, snorting angrily through his nose, when they passed. – Im Raum then [In space (German)] I still have a father, a son, and a sister in Bald Mountains. He doesn't care. This is what I told you - these German gentlemen will not win the battle tomorrow, but will only spoil how much their strength will be, because in his German head there are only reasonings that are not worth a damn, and in his heart there is nothing that is only and what is needed for tomorrow is what is in Timokhin. They gave all of Europe to him and came to teach us - glorious teachers! – his voice squealed again. – So you think that tomorrow’s battle will be won? - said Pierre. “Yes, yes,” said Prince Andrei absently. “One thing I would do if I had power,” he began again, “I would not take prisoners.” What are prisoners? This is chivalry. The French have ruined my house and are going to ruin Moscow, and they have insulted and insulted me every second. They are my enemies, they are all criminals, according to my standards. And Timokhin and the entire army think the same. We must execute them. If they are my enemies, then they cannot be friends, no matter how they talk in Tilsit.
What is a tachogenerator
These are low-power electric generators with a power of 10 to 50 W. Their purpose is based on the conversion of rotational frequency (moving a mechanical plane by rotating a shaft) into electrical signals (voltage) in automatic systems. Thus, on diesel locomotives with electric transmission, equipment is used to regulate power automatically.
The device is part of an electric motor connected or mounted to a shaft. The outgoing signal from the unit is supplied either to a special automatic control device (controlling the speed of the electric motor shaft) or to a visual display device. Thus, we can answer the question - what is the principle of operation of the tachogenerator based on.
Asynchronous AC tachogenerators
Figure 1. Asynchronous tachogenerator (a – design, b – dependence of the output voltage on the rotor speed).
On stator 1 (Fig. 1, a), in an asynchronous alternating current tachogenerator, there is an excitation winding (OW) and an output (generator) winding (EG) shifted relative to it by 90°. Between the stationary stator 1 and the internal ferromagnetic core 2 (Fig. 1, a) there is a rotor 3 (Fig. 1, a), made in the form of a thin-walled glass, which rotates during operation of the tachogenerator.
When supplying alternating voltage is applied to the excitation winding and the rotor rotates, an EMF will be induced in the output (generator) winding. The amplitude and average values of the induced EMF are proportional to the angular velocity of the rotor (the higher the speed (n), the greater the amplitude (Uout), see Fig. 1, b). The frequency of the induced EMF does not depend on the rotor speed and is constantly equal to the frequency of the network supplying the field winding.
It should be noted that when processing the output signal of an asynchronous tachogenerator, it is possible to “fix”, using certain circuit solutions, a change in the direction of rotation of the rotor, since in these cases the phase of the output voltage (induced EMF) changes to the opposite.
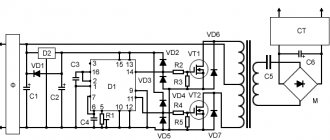
Figure 2. Electrical circuit of an asynchronous tachogenerator
Maintaining strict proportionality between the tachogenerator rotor speed and the output electrical signal is the main requirement for tachogenerators. For asynchronous tachogenerators, an error of 0.5-2.5% is usually allowed when measuring rotation speed, 0.05-0.1% in the integrating and differentiating sections of counting devices. In special cases, tachogenerators are manufactured with even higher precision.
In addition, tachogenerators must be: sufficiently reliable when environmental conditions change (temperature, humidity, etc.); withstand shock and vibration loads; do not create noise or radio interference; have great speed; be small in size and weight, and also be simple in design. Asynchronous AC tachogenerators most fully meet the above requirements.
Below is a list of the main parameters with the ranges of their average possible values:
— slope of the output characteristic, Ku=ΔU/ Δn, Ku=1...10 mV/min-¹;
— the value of the residual EMF (when the rotor does not rotate) should not exceed 0.1%
maximum output value and usually ranges from 25...100 mV;
- static friction moment, the moment at which the rotor begins to rotate,
is Mst = 0.0002…0.001 n•m;
— maximum operating rotor speed, nmax= 8000…10000 rpm-¹;
Let's take a closer look at the operating principle of an asynchronous AC tachogenerator. In Figure 3, letters B indicate the excitation winding, and letters G indicate the generator (output) winding, and it is also shown that they are shifted relative to each other by 90°. f passes through the excitation winding , this results in the creation of a magnetic flux Ф d, pulsating with frequency f 1, the axis of which coincides with the axis ( d - d ) of the excitation winding. The axis of the excitation winding is called longitudinal, therefore the magnetic flux Ф d will be called longitudinal. Perpendicular to the axis ( d - d ) the transverse axis ( q - q ) of the generator winding is depicted.
where w in is the number of turns of winding B , k rev. in is the winding coefficient of winding B ;
Due to the presence of a transformer connection between windings B and G, the magnetic flux Ф d induces a certain EMF in the winding G, called residual and having relatively small values since the above windings are shifted by 90° and therefore the flux lines Ф d to a small extent penetrate the turns of the winding G.
The hollow rotor of a tachogenerator can be imagined as a set of many elementary conductors. The pulsating magnetic flux Ф d also induces in them an emf called transformer ( e tr), which in turn causes a current i tr in these conductors. creating a magnetomotive force F 2d along the longitudinal axis of the machine, acting both with a stationary and rotating rotor. Let us recall that magnetomotive force (mf) is a physical quantity that characterizes the ability of electric currents to create magnetic fluxes and is used in calculations of magnetic circuits as “an analogue of emf in electric circuits.” Please note that when the m.m.f. appears. F 2d, a compensating current appears in the excitation winding of the tachogenerator (as in a transformer), and the MMF F in.d created by this current will compensate for the action of the MMF F 2d.
From the basic laws of physics it is known that when a conductor moves in a magnetic field, an EMF is induced in it, therefore, when the tachogenerator rotor rotates from an extraneous mechanism in a magnetic field Ф d of the excitation winding in its elementary conductors, in addition to the transformer ( e tr.), an EMF is also induced rotation ( e time).
The magnetic flux Ф d, penetrating the turns of the excitation winding, induces an EMF in it.
where B x is the induction at the currently considered air gap point,
l 2 – length of the rotor in a magnetic field, v 2 – peripheral speed of the rotor.
The rotational emf ( e i in the rotor conductors , which in turn create an MMF F 2q and a pulsating magnetic flux Ф q, the direction of which coincides with the transverse axis ( q - q ) of the output winding Г , which leads to the induction of EMF in it:
It should be noted that the frequency of change of the EMF of the output winding is always equal to the frequency f 1 of the EMF of the excitation winding and does not depend on the rotor rotation speed, which is a valuable property of an asynchronous AC tachogenerator.
Figure 3. Distribution of EMF and currents in a hollow rotor, induced as a result of pulsation of the flow Фd (a) and rotation of the rotor (b).
In the absence of saturation of the magnetic system, it can be argued that U out ~ E g. In an idealized tachogenerator, the emf. in the output winding, and therefore U out, are directly proportional to the rotor speed, i.e. the output characteristic U out = f (v) is linear (Fig. 4, line 2). Unfortunately, the real output characteristic of the tachogenerator (Fig. 4, line 1) differs from linear, i.e. error Δ U out appears.
Figure 4. Output characteristics of an uncalibrated (a) and calibrated (b) asynchronous tachogenerator.
The main reasons causing the deviation of the tachogenerator output characteristic from a linear relationship:
— inaccuracies in manufacturing, mainly related to production technologies;
- variability of winding resistance and magnetic resistance along different axes
( d - d , q - q , ... in Fig. 3) as a result of changes in temperature, saturation, etc.;
— some parameters change their values depending on the rotor speed,
for example, the resistance of a hollow rotor changes;
— the values of magnetic fluxes Ф d (Fig. 3) and Ф q caused by
electromagnetic reaction of the rotor when its rotation speed changes, and/or
changes in the load value of the tachogenerator output winding, Z ng.
Why do you need a tachogenerator?
Let's figure out where tachogenerators are used. They are used as sensors that measure and control speed. This is a fairly informative electric machine.
The areas of its application are:
- oscillography of changes in rotational speed of shafts;
- feedback in tracking systems.
Equipment is also used directly to measure the rotation speed of mechanisms and machines.