Instructions
Author temass
Date
Jul 18, 2017
13,235
Share
Sometimes questions from mathematics and physics come up in relation to cars. In particular, one such issue is angular velocity. It relates both to the operation of mechanisms and to cornering. Let’s figure out how to determine this value, how it is measured, and what formulas need to be used here.
- How to determine angular velocity: what is this quantity?
- Formula for the time it takes for a point to rotate around a circle of a given radius
- Rotation angle and period of revolution
- What is the angular velocity in specific cases?
- Relationship between angular and linear speeds
- Acceleration, moment and their connection with mass
- Hinge as an example of impulse transmission
Angle of rotation
In all equations of rotational motion, angles are specified in radians, abbreviated as rad.
If ? is the angular displacement in radians, s is the length of the arc enclosed between the sides of the angle of rotation, r is the radius, then by definition of radian
Relationship between angle units
Please note: The name of the unit radian (rad) is usually indicated in formulas only in cases where it can be confused with a degree. Since a radian is equal to the ratio of the lengths of two segments (1rad = 1m/1m = 1), it has no dimension.
The relationship between angular velocity, angular displacement and time for all types of circular motion is clearly visible on the graph of angular velocity (dependence of δ on t). Therefore, the graph can determine what angular velocity a body has at a given moment in time and at what angle it has turned since the beginning of its movement (it is characterized by the area under the curve).
In addition, to present the relationships between these quantities, use a graph of angular displacement (dependence of δ on t) and a graph of angular acceleration (dependence of δ on t).
Cyclic speed (reversal)
A scalar quantity that measures the frequency of rotational motion is called cyclic speed. This is the angular frequency, which is not equal to the angular velocity vector itself, but to its magnitude. It is also called radial or circular frequency.
Cyclic rotation frequency is the number of body revolutions in 2*π seconds.
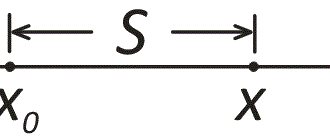
For AC electric motors, this frequency is asynchronous. Their rotor speed lags behind the rotation speed of the stator magnetic field. The value that determines this lag is called slip - S. During the sliding process, the shaft rotates because an electric current arises in the rotor. Slip is permissible up to a certain value, exceeding which leads to overheating of the asynchronous machine, and its windings may burn out.
The design of this type of motor differs from the design of DC machines, where a current-carrying frame rotates in the field of permanent magnets. The armature contained a large number of frames, and many electromagnets formed the basis of the stator. In three-phase AC machines the opposite is true.
When an asynchronous motor operates, the stator has a rotating magnetic field. It always depends on the parameters:
- mains frequency;
- number of pole pairs.
The rotation speed of the rotor is in direct relation to the speed of the stator magnetic field. The field is created by three windings, which are located at an angle of 120 degrees relative to each other.
Read also: Sell a car before divorce
Speed
A characteristic of all types of rotation is the number of revolutions n or an equivalent characteristic - frequency f. Both quantities characterize the number of revolutions per unit time.
SI unit of frequency (or number of revolutions)
In engineering, the number of revolutions is usually measured in revolutions per minute (rpm) = 1/min.
Thus, the reciprocal of the number of revolutions is the duration of one revolution.
If n is the number of revolutions, f is the frequency, T is the duration of one revolution, period, ? — angular displacement, N — total number of revolutions, t — time, duration of rotation, ? is the angular frequency, then
Period
Angular movement
The angular movement is equal to the product of the total number of revolutions by 2?:
Angular velocity
From the formula for one revolution it follows:
Please note: • the formulas are valid for all types of rotational motion - both for uniform motion and for accelerated motion. These can include constant values, average values, start and end values, and any instantaneous values. • contrary to its name, the number of revolutions n is not a number, but a physical quantity. • a distinction must be made between the number of revolutions n and the total number of revolutions N.
Frequency and period
Rotational motion is described using characteristics such as frequency and period.
The period of revolution is the time of one complete revolution. In the SI system, the period is measured in seconds.
\( T \left(c \right)\) – the time during which the body made a full revolution – period. Time is a scalar quantity.
Frequency answers the question: “How many full revolutions did the body make in one second?”
\( \displaystyle \nu\left( \frac{1}{c} \right)\) – rotation frequency, scalar.
Instead of writing \( \displaystyle \left( \frac{1}{c} \right)\) sometimes they use \(\displaystyle \left( c^{-1} \right)\), or \( \left( \ text{Hz} \right)\) – Hertz. This is the name of Heinrich Hertz, the famous physicist.
\[\displaystyle 1 \text{Hz} = \frac{1}{c} = c^{-1} \]
Frequency and period are related by inverse proportionality:
\[ \large \boxed{ T = \frac{1}{\nu} } \]
Uniform movement of a body in a circle
A body is said to move uniformly in a circle if its angular velocity is constant, i.e. the body rotates through the same angle at equal intervals of time.
? — angular velocity (constant during time t) ? — angular displacement t — time to rotate through an angle ?
Since the area of the rectangle on the angular velocity graph corresponds to the angular displacement, we have:
or
Constant angular velocity is the ratio of angular displacement (angle of rotation) to the time spent on this movement.
SI unit of angular velocity:
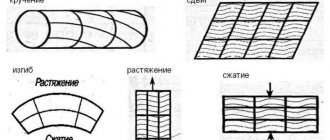
Tangential acceleration
In general, acceleration when moving in a circle consists of two components - normal and tangential.
Let us consider the case when a body moves unevenly around a circle. Let us introduce the concept of tangential (tangential) acceleration. Its direction coincides with the direction of the linear velocity of the body and at each point of the circle is directed tangent to it.
a τ = ∆ v τ ∆ t ; ∆ t → 0
Here ∆ v τ = v 2 - v 1 is the change in velocity module over the interval ∆ t
The direction of the total acceleration is determined by the vector sum of the normal and tangential accelerations.
Circular motion in a plane can be described using two coordinates: x and y. At each moment of time, the speed of the body can be decomposed into components vx and vy.
If the motion is uniform, the quantities vx and vy as well as the corresponding coordinates will change in time according to a harmonic law with a period T = 2 π R v = 2 π ω
The laws that determine the motion of a body in a circle are similar to the laws of translational motion. The equations describing rotational motion can be derived from the equations of translational motion by making the following substitutions in the latter:
If: displacement s - angular displacement (angle of rotation) ?, speed u - angular velocity ?, acceleration a - angular acceleration ?
Uniformly accelerated motion in a circle without initial angular velocity
The body begins to move from a state of rest, and its angular velocity uniformly increases.
? — instantaneous angular velocity of the body at time t? — angular acceleration, constant during time t? - angular displacement of the body during time t, (? in radians) t - time
Since on the velocity graph the angular displacement is equal to the area of the triangle, we have:
Or
Since the rotation of the body begins from a state of rest, the change in angular velocity ?? equal to the angular velocity ? achieved as a result of acceleration. Therefore, the formula takes the following form:
or
Uniformly accelerated motion in a circle with an initial angular velocity
The initial velocity of the body, equal to ?0 at the moment t = 0, changes uniformly by the amount ??. (The angular acceleration is constant.)
?0—initial angular velocity? — final angular velocity ? — angular displacement of the body during time t in radians t — time ? — angular acceleration is constant during time t
Since on the velocity graph the angular displacement corresponds to the area of the trapezoid under the velocity curve, we have:
Since the area of a trapezoid is equal to the sum of the areas of the triangle and rectangle forming it, we obtain:
where
Further from the speed graph it follows
Combining the formulas we get
After the transformation we get an expression that does not contain time:
Law of addition
For different reference systems for the movement of material points, there is a law that connects them with each other. According to it, the speed of something relative to a system at rest is determined by the sum of the force of displacement of velocities in the moving region and a faster reference frame relative to the stationary one.
To understand the essence of the law, it is best to consider a simple example. Let a carriage move along a railway at a speed of 80 km/h. A passenger moves in this carriage at a speed of 3 km/h. Taking a stationary railway track as a reference system, it can be argued that the speed of a passenger relative to it is equal to the sum of the speed of the carriage and the person.
If the movement of the carriage and the passenger occurs in one direction, then the values are simply added, V = 80+3 = 83 km/h, in the opposite direction, V = 80−3 = 77 km/h are subtracted. But this rule will be true only when the movement occurs along one line. Therefore, if a person moves in a carriage at an angle, this factor should also be taken into account, since in essence the required parameter is a vector quantity. In fact, two speeds are calculated: approaching and moving away.
The event in question occurs in time Δt . During this period, the person will cover the distance ΔS1, while the car will be able to cover the distance ΔS2. Using the law, the passenger's movement will be determined by the formula: ΔS = ΔS1 + ΔS2. The person’s own motion relative to the railway track will be equal to V = ΔS1 / Δt. By expressing the value from the formula for finding ΔS, you can find the speed of the car relative to the railway: V2 = ΔS2 / Δt.
Instantaneous angular velocity
The full angle of rotation of the body at any time can be determined from the graph of the angular displacement. The steeper the graph, the greater the instantaneous angular velocity at a given time.
? is the angle between the tangent and the time axis t? — instantaneous angular velocity ? — angular displacement at time t
or
The instantaneous angular velocity is the first derivative of the function? = ?(t) in time.
Please note: 1) to calculate the instantaneous angular velocity ?, it is necessary to know the dependence of the angular displacement on time. 2) the formula for angular displacement for uniform motion of a body in a circle and the formula for angular displacement for uniformly accelerated motion in a circle without initial angular velocity are special cases of formula (2), respectively for ? = 0 and ? = const.
From the formulas it follows:
Integrating both sides of the expression, we get
Angular displacement is the time integral of the angular velocity.
Please note: To calculate the angular displacement ? it is necessary to know the dependence of angular velocity on time.
Normal acceleration
With uniform motion in a circle, the velocities v and ω remain unchanged. Only the direction of the linear velocity vector changes.
In this case, uniform motion in a circle affects the body by centripetal, or normal acceleration, directed along the radius of the circle to its center.
an = ∆ v → ∆ t , ∆ t → 0
The modulus of centripetal acceleration can be calculated using the formula:
an = v 2 R = ω 2 R
Let us prove these relations.
Let's consider how the vector v → changes over a short period of time ∆ t. ∆ v → = v B → – v A → .
At points A and B, the velocity vector is directed tangentially to the circle, while the velocity modules at both points are the same.
By definition of acceleration:
a → = ∆ v → ∆ t , ∆ t → 0
Let's look at the picture:
Triangles OAB and BCD are similar. It follows that OAAB = BCCD.
If the value of the angle ∆ φ is small, the distance AB = ∆ s ≈ v · ∆ t. Taking into account that OA = R and CD = ∆ v for the similar triangles considered above, we obtain:
R v ∆ t = v ∆ v or ∆ v ∆ t = v 2 R
When ∆ φ → 0, the direction of the vector ∆ v → = v B → - v A → approaches the direction to the center of the circle. Assuming that ∆ t → 0, we obtain:
a → = an → = ∆ v → ∆ t ; ∆ t → 0 ; an → = v 2 R .
With uniform motion around a circle, the acceleration modulus remains constant, and the direction of the vector changes with time, maintaining orientation to the center of the circle. That is why this acceleration is called centripetal: the vector at any moment of time is directed towards the center of the circle.
Writing centripetal acceleration in vector form looks like this:
Here R → is the radius vector of a point on a circle with its origin at its center.
Rotational movement of the body, formulas
| During the rotational motion of a rigid body, all elements of its mass that do not lie on the axis of rotation move in a circle. Similarly, a material point located at a distance r > 0 from the axis of rotation also moves in a circle, like any body sufficiently distant from the axis of rotation. Linear displacement Sl, linear speed uL and linear acceleration al during such movement are interconnected by the usual relations for translational motion. |
In addition, these quantities are related in a certain way to the angular displacement ?, angular velocity ? and angular acceleration ?.
| Sl | moving a body along a trajectory, | meter |
| Ul | body speed when moving along a trajectory, | meter/second |
| al | acceleration of a given body when moving along a trajectory, | meter/second2 |
| r | trajectory radius, | meter |
| d | trajectory diameter, | meter |
| ? | angular movement of the body, | radian |
| ? | angular velocity of the body, | radian/second |
| ? | angular acceleration of the body, | radian/second2 |
| f | frequency, | Hertz |
Note: The formulas are valid for constant, instantaneous and average quantities, in all cases of body motion in a circle.
moment of force
If, when considering a physical problem, we are dealing not with a material point, but with a solid body, then the action of several forces on it, applied to different points of this body, cannot be reduced to the action of one force. In this case, the moment of force is considered.
The moment of force is the product of force and arm. This is a vector quantity, and it is found by the formula: M = RFsinα, where α is the angle between the vectors R and F. If several moments of force act on a body, then their action can be replaced by their resultant, vector sum of these moments: M = M1 + M2 + …+ Mn.
Experiments and experience show that under the influence of a moment of force the angular velocity of a body changes, that is, the body has angular acceleration. Let us find out how the angular acceleration of a material point (a set of material points) depends on the applied moment of force: F = mɑ, RF = Rma = R 2 mβ, β = M/mR 2 = M/I, where I = mR 2 is the moment of inertia of the material points. Note that the moment of inertia of a body depends both on the mass of the body and on the location of this mass relative to the axis of rotation.