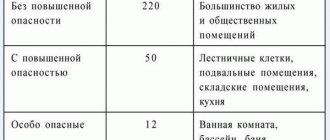
Classification of automatic devices by purpose.
In accordance with the functions they perform, automatic devices are divided into classes:
1.Remote control systems
allow remote control of individual units or their components. In some cases, these systems are a reserve in the event of failure of automatic devices, as well as the launch of commissioning tests and other situations.
2.Telecontrol
— a device for transmitting signals over a small number of communication channels. During remote control, each control signal has its own communication channel; in telecontrol systems, several control signals with frequency or time multiplexing are transmitted over one channel.
3.Automatic control systems
. In these systems, the action of service personnel to control technological equipment is replaced by the action of software devices (controlling computers), which control the parameters of technological processes and transmit signals to control the equipment.
4.Automatic control systems.
This is a form of control automation in which automatic devices only collect information about the progress of the technological process without feedback on the object. These devices only respond to changes in process parameters.
5.Automatic alarm systems
. Designed for timely notification of the value of controlled parameters and equipment condition. Alarms are:
· Command (alert)
· Control (on/off actuators)
· Warning (about the approach of a controlled value to an emergency value)
· Emergency (emergency shutdown of devices).
6.Automatic protection system
. Designed to protect personnel and equipment from accidents.
7.Automatic locking system
. Protects technological equipment from improper actions of personnel. There are 2 types of automatic blocking:
· Prohibited/permissive (prevents incorrect on/off options for equipment)
· Emergency interlocks provide the correct sequence for shutting down equipment in the event of an emergency.
8.Automatic control system
designed to maintain a constant level or change according to a certain law of any technological quantity.
In accordance with the functions they perform, automatic devices are divided into classes:
1.Remote control systems
allow remote control of individual units or their components. In some cases, these systems are a reserve in the event of failure of automatic devices, as well as the launch of commissioning tests and other situations.
2.Telecontrol
— a device for transmitting signals over a small number of communication channels. During remote control, each control signal has its own communication channel; in telecontrol systems, several control signals with frequency or time multiplexing are transmitted over one channel.
3.Automatic control systems
. In these systems, the action of service personnel to control technological equipment is replaced by the action of software devices (controlling computers), which control the parameters of technological processes and transmit signals to control the equipment.
4.Automatic control systems.
This is a form of control automation in which automatic devices only collect information about the progress of the technological process without feedback on the object. These devices only respond to changes in process parameters.
5.Automatic alarm systems
. Designed for timely notification of the value of controlled parameters and equipment condition. Alarms are:
· Command (alert)
· Control (on/off actuators)
· Warning (about the approach of a controlled value to an emergency value)
· Emergency (emergency shutdown of devices).
6.Automatic protection system
. Designed to protect personnel and equipment from accidents.
7.Automatic locking system
. Protects technological equipment from improper actions of personnel. There are 2 types of automatic blocking:
· Prohibited/permissive (prevents incorrect on/off options for equipment)
· Emergency interlocks provide the correct sequence for shutting down equipment in the event of an emergency.
8.Automatic control system
designed to maintain a constant level or change according to a certain law of any technological quantity.
Types of releases
The protection includes an electromagnetic and thermal release. The operation of each element is autonomous and does not depend on the state of each other.
The thermal release is a metal plate whose purpose is to respond to heat. To turn on the device, the plate must cool to the initial permissible temperature.
The operating principle of the circuit breaker depends on the specific situation.
Work mode
Electric machines are activated by raising the control lever. The charging and releasing mechanism switches to the active state. Switching of power contacts occurs: current flows between them (from stationary to moving). After this, the movement continues through the flexible connection to the coil of the electromagnetic release, and then through the flexible connection to the thermal release. The current enters the “supply” power line through the bottom terminal.
Mechanism of action during short circuit (SC)
Timely shutdown of the load supply is ensured by an electromagnetic release. The principle of operation of a circuit breaker during a short circuit boils down to the following scheme: a voltage exceeding the permissible norm, flowing through the electromagnetic coil of the release, forms a high-power magnetic field. As a result, the armature with the moving contact moves down, acting on the trigger lever, after which the load is turned off.
Thus, the immediately arising magnetic field provokes a reaction to de-energize the network before an emergency occurs.
During the occurrence of a discharge, combustion products are formed between the contacts, and the pressure inside the machine body also increases. It is necessary to eliminate side reactions, for which channels are provided in the machine box.
Overload
The network is protected thanks to a thermal release - a bimetallic plate. In this case, the current flowing through it may exceed the normal value, which leads to its overheating and subsequent bending. Reaching a certain bending angle, the plate acts on the trigger device, during which the machine turns off.
Heating up the bimetal takes time. The duration depends on the degree of excess of the applied current and can be several seconds or last up to an hour. This property allows you not to turn off the power in the event of short-term or accidental excess current in the network. The lower limit of the permissible value at which the thermal release is triggered is set by the manufacturer. The correct operation of the thermal element can be influenced by the ambient air temperature. The technical parameters indicated in the marking are relevant for temperatures up to 30 degrees. In a cool room, the current can reach a value higher than the permissible value; in a hot room, it can trigger at a lower value.
The thermal release is slower than the magnetic release, but has the advantage of being more accurate and easier to set up.
Mechanical, automatic computing devices.
Development of mechanics in the 17th century. became a prerequisite for the creation of computing devices and instruments using the mechanical principle of calculations. Such devices were built on mechanical elements and provided automatic transfer of the highest order.
The first mechanical machine was described in 1623 by W. Schickard, implemented in a single copy and intended to perform four arithmetic operations on 6-bit numbers.
Schickard's machine consisted of three independent devices: adding, multiplying and recording numbers. Addition was carried out by sequentially entering addends using dials, and subtraction was done by sequentially entering the minuend and subtrahend. The entered numbers and the result of addition/subtraction were displayed in the reading windows. The idea of lattice multiplication was used to perform the multiplication operation. The third part of the machine was used to write a number of no more than 6 digits in length. The schematic diagram of the Schickard machine used was classic - it (or its modifications) was used in most subsequent mechanical calculating machines until the replacement of mechanical parts with electromagnetic ones. However, due to insufficient popularity, Schickard's machine and the principles of its operation did not have a significant impact on the further development of computer technology , but it rightfully opens the era of mechanical computing technology.
B. Pascal's machine used a more complex scheme for transferring high-order bits, which was rarely used in the future; but the first working model of the machine, built in 1642, and then a series of 50 machines contributed to the fairly wide popularity of the invention and the formation of public opinion about the possibility of automating mental work. Only 8 Pascal machines have survived to this day, one of which is 10-bit. It was Pascal's machine that marked the beginning of the mechanical stage of development of VT.
In the 17th and 18th centuries, a number of different types and designs of adding devices and adding machines were offered, until in the 19th century. the growing volume of computing work did not determine a sustainable demand for mechanical calculating devices and did not contribute to their mass production on a commercial basis.
The first arithmometer, allowing all four arithmetic operations, was created by G. Leibniz as a result of many years of work. The culmination of this work was the Leibniz adding machine, which allows the use of an 8-bit multiplicand and a 9-bit multiplier to obtain a 16-bit product. Compared to Pascal's machine, a fundamentally new computing device was created that significantly speeds up the execution of multiplication and division operations. However, the Leibniz arithmometer did not become widespread for two main reasons: the lack of stable demand for it and the design inaccuracy that affects the multiplication of its limiting numbers.
In the 17th-18th centuries. A whole series of computational tools were proposed based on the model of Pascal and Leibniz (with varying degrees of modernization), based on Napier's sticks, or original developments. The proposed designs were separate multiplying devices or combinations of summing and multiplying parts.
Early 19th century characterized by the development of computing tools in three main directions: adding, multiplying devices, and adding machines; At the same time, the development of adding machines becomes predominant.
In 1881, L. Thomas organized mass production of adding machines in Paris. The design of his adding machine is based on the use of a Leibniz stepped roller and was a further development of the Leibniz adding machine, distinguished by a number of useful design solutions: a convenient form of entering a number, the presence of an anti-inertia device, a number damping mechanism, etc. This adding machine was called the Thomas machine and its production was small - for the entire 19th century. About 2,000 Thomas machines were produced. However, an important advantage of Thomas machines was their durability - the adding machine was used even in calculations related to the preparation of the GOELRO plan in 1920.
An important milestone in the development of arithmometers should be considered the creation in 1888 of the Bolle machine, which performed the multiplication operation three times faster than the arithmometers existing at that time (that is why the machine was called a multiplier).
Increase in the second half of the 19th century. Computational work in a number of areas of human activity has put forward an urgent need for computer technology and increased requirements for it. The various types of computing devices existing at that time could not solve this problem. And only the creation in 1874 by V. Ordner (Russia) of his model of an adding machine, which was based on a specially designed Ordner gear wheel, can be considered the beginning of mathematical engineering. Throughout its existence, the Ordner adding machine was improved and produced in several versions, receiving a number of high awards. The growth in the production of Ordner adding machines continued both in the USSR and abroad; Since 1931, it has received the name Felix, under which it is well known to existing generations of domestic computers.
Initially, the advent of computers did not have a very significant impact on the production and use of adding machines, primarily due to their different purposes, prevalence and cost. However, since the 60s, ECVMs (electronic keyboard computers) have increasingly come into widespread use.
A special place among the developments of the mechanical stage of development of computer technology is occupied by the works of Ch. Babage, who is rightfully considered the founder and ideologist of modern computer technology . Among Babage's works, two main directions are clearly visible: difference and analytical computers.
The difference engine project was developed in the 20s of the 19th century. and was intended for tabulating polynomial functions by the finite difference method. The main impetus for this work was the urgent need to tabulate functions and check existing mathematical tables, which were riddled with errors. However, this project was not completed, but Babbage's followers created working difference engines, which have found wide application in science and technology.
Babage's second project was an analytical engine that used the principle of program control and was the predecessor of modern computers. This project was proposed in the 30s of the 19th century, and in 1843 Aloy Lovelace wrote the world's first fairly complex program for calculating Bernoulli numbers for Babage's machine. Both of these achievements can be considered outstanding, as being more than a century ahead of their era. The Analytical Engine project was not implemented, but became very widely known and earned high praise from a number of scientists, primarily mathematicians. Ch. Babidge developed many drawings of the machine itself and manufactured a number of its blocks; his son Henry tried to implement the project, but it remained completely only at the level of a preliminary design. The idea of the analytical engine arose from Babage while working on the difference engine. The Analytical Engine was intended to calculate any algorithm (in our terminology) and was conceived to be purely mechanical.
At the beginning of 1836, Babage already had a clear idea of the basic design of the machine, and in 1837, in the article “On the Mathematical Performance of a Calculating Machine,” he described his project in some detail.
The analytical engine consisted of the following four main parts:
- a block for storing initial, intermediate data and calculation results. It consisted of a set of gears that identified numbers like an adding machine;
- a number processing unit from a warehouse called a mill (in modern terminology, this is an arithmetic device). The organization of the block was similar to the first block;
- calculation sequence control unit (in modern terminology, this is a control device for the control unit);
- block for inputting source data and printing results (in modern terminology, this is an input/output device).
Ch. Babidge used a mechanism in his machine similar to the mechanism of the Jacquard loom, using special control punch cards. According to Babage's idea, control should be carried out by a pair of Jacquard mechanisms with a set of punched cards in each.
Babage had surprisingly modern ideas about computing machines, but the technical means at his disposal lagged far behind his ideas.
The main merit of A. Lovelace is not only the creation of the first program for the Babage machine, but also a complete and accessible description of the machine, as well as an analysis of its capabilities for solving various computing problems. Along with this, Lovelace widely popularized the ideas of Ch. Babage, she herself designed some machine components and researched the use of binary systems, and also expressed a number of ideas that have become widely used only in our time.