Асинхронный двигатель и его работа
Очевидно, что режимы функционирования электродвигателей асинхронного типа напрямую зависят от их конструкции и общих принципов работы. Этот силовой агрегат совмещает в себе два ключевых компонента:
- Неподвижный статор. Пластинчатый цилиндр, в продольные пазы на внутренней поверхности которого укладывается проволочная обмотка,
- Вращающийся ротор. Совмещенный с валом сердечник (магнитопровод), который содержит прутковую обмотку на внешней стороне.
За счет различных частот вращения статора и ротора между ними возникает ЭДС, которая приводит вал в движение. Стандартное значение этого параметра может достигать 3000 об/мин, что требует определенного усилия для ее остановки. Из логических соображений можно заключить, что раз стартует двигатель за счет ЭДС, то и останавливать его тоже нужно электродинамическим путем.
Рабочие характеристики асинхронного двигателя
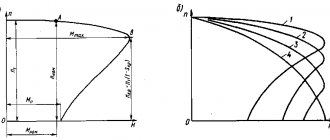
Рабочие характеристики асинхронного двигателя – это зависимости P1(P2), I1(P2), M(P2), s(P2), cos ф(P2), η(P2).
Рабочие характеристики короткозамкнутого асинхронного двигателя 1470 об/мин, 220/380 В, мощностью 50 кВт, построены в относительных единицах.
Даже тогда, когда полезная мощность равна нулю, работающий двигатель потребляет из сети мощность, называемую мощностью холостого хода P0, соответственно по статору протекает ток I0 и на валу двигателя создается момент, называемый моментом холостого хода.
Рабочие характеристики строятся для интервала мощностей от 0 до 1,25 Pном.
cos ф достигает максимального значения при мощности Pном и при увеличении нагрузки остается постоянным.
КПД достигает максимума, когда магнитные потери становятся равными электрическим. Электрические машины проектируются таким образом, чтобы это равенство достигалось приблизительно при номинальной мощности.
К рабочим характеристикам принято также относить механическую характеристику.
Что такое динамическое торможение?
На этом месте может возникнуть закономерный вопрос: зачем что-то придумывать, если можно отключить двигатель от электросети, и он сам остановится? Это бесспорно так, но учитывая высокую частоту вращения и массо-центровочные характеристики, пройдет некоторое время до того момента, когда ротор полностью остановится. Этот период называется свободным выбегом и каждый в детстве его наблюдал, запуская простую юлу. Тем не менее, если работа оборудования предполагает частое использование пускателей, то такой режим приводит к очевидной потере времени.
Для быстрой остановки используются режимы торможения, которые предполагают трансформацию механической (в данном случае – кинетической) энергии искусственным путем. Все выделяют два основных вида торможения, которые подразделяются затем на подвиды:
- Механическое. Вал двигателя сообщается физически с тормозными колодками, вследствие чего возникает трение, быстрая остановка и выделение теплоты,
- Электрическое. Асинхронный двигатель останавливается за счет преобразования цепи подключения, вследствие чего механическая энергия трансформируется сперва в электрическую. Далее возможны два варианта ее израсходования, зависящие от схемы: либо избыток электричества выбрасывается в резервную цепь сети, либо трансформируется в тепло, за счет нагрева обмоток и сопротивления.
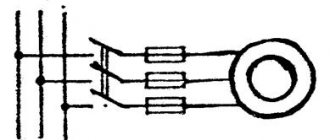
Динамическое торможение асинхронного двигателя относится к электрическому типу, так как в процессе обмотка статора отключается от сети с переменным током (две из трех фаз) и переводится в замкнутую цепь постоянного тока. При этом магнитное поле в статоре преобразуется из вращающегося в неподвижное. В роторе по-прежнему будет наводиться ЭДС, но момент будет направлен в обратную сторону, что приводит к торможению.
Классическая схема, как можно видеть на иллюстрации, предусматривает отключение от сети одной фазы контактором КМ1. При этом две другие фазы за счет контактора КМ2 переключаются в цепь с постоянным током через диодный мост.
Главным преимуществом такого способа торможения является возможность плавно контролировать тормозящий момент (за счет изменения напряжения или сопротивления) и осуществлять точную остановку.
Тормозные режимы асинхронного двигателя
АД может работать во всех трех тормозных режимах:
а) с рекуперацией энергии в сеть;
б) противовключение;
в) динамическое торможение.
а) Торможение с рекуперацией энергии в сеть .
При отсутствии внешнего статического момента на валу двигатель, подключенный к сети будет вращаться со скоростью, близкой к синхронной. При этом из сети потребляется энергия, необходимая для покрытия потерь. Если за счет внешней силы ротор вращается с синхронной скоростью, то сеть будет покрывать только потери в статоре, а потери в роторе (механические и в стали) будут покрываться внешней силой.
В двигательном режиме, когда вращающееся магнитное поле пересекает проводники обмоток статора и ротора в одинаковом направлении, ЭДС статора Е1 и ротора Е2 совпадают по фазе. При w=w0 ЭДС в роторе не наводится, т.е. равна 0. При w>w0 проводники обмотки статора пересекаются вращающимся полем в прежнем направлении, а проводники ротора – в противоположном.
ЭДС ротора Е2 меняет свой знак на обратный; машина переходит в генераторный режим с рекуперацией энергии. Что касается тока, то изменяет свое направление только его активная составляющая. Реактивная составляющая при отрицательном скольжении сохраняет свое направление. Это видно и из выражения для тока ротора (при S<0 S2>0).
Такие же выводы можно сделать и на основе анализа активной (электромагнитной) и реактивной мощностей. Действительно, из выражения для РЭМ следует, что при S<0 PЭМ>0 Т.е. активная мощность меняет направление (передается в сеть), а из выражения для Q2 следует, что при S<0 реактивная мощность вторичного контура Q2 сохраняет свой знак независимо от режима работы машины.
Это значит, что асинхронная машина как в двигательном, так и в генераторном режиме потребляет реактивную мощность, необходимую для создания магнитного поля.
Торможение с отдачей энергии в сеть используется в подъемно-транспортных установках, при спуске тяжелых грузов. Под действием груза ротор машины будет вращаться со скоростью w>w0, машина переходит в генераторный режим и начинает создавать тормозной момент. При равенстве M=Mc груз будет опускаться с установившейся скоростью wc, как показано на рисунке. Необходимо иметь в виду, что для обеспечения нормального спуска груза Mc не должен превышать критический момент в генераторном режиме. При реактивном моменте сопротивления кратковременно режим с рекуперацией энергии в сеть можно получить, если АД допускает переключение обмотки статора с одной пары полюсов на другую, как показано на приведенном графике.
Режим с рекуперацией имеет место на участке ВС после переключения обмотки статора с числа пар полюсов rП=1 на rП=2 .
б) торможение противовключением.
В режиме противовключения ротор двигателя вращается в направлении, противоположном действию момента двигателя. Его скольжение S>1, а частота тока в роторе больше частоты питающей сети ( ). Поэтому несмотря на то, что ток ротора больше номинального в 7 –9 раз, т.е. больше пускового тока, момент в следствие большой частоты тока, следовательно большого индуктивного сопротивления роторной цепи ( ), будет невелик. Поэтому для увеличения момента и одновременного уменьшения тока в цепь ротора включают большое добавочное сопротивление, величину которого можно подсчитать по выражению
Где Е20 — номинальная ЭДС ротора при S=1
Sн – номинальное скольжение
Sн и – скольжение при номинальной нагрузке на искусственной характеристике.
При спуске груза в режиме противовключения торможение протекает на прямолинейном участке механической характеристики, жесткость которой определяется активным сопротивлением в цепи ротора. Механическая характеристика АД при тормозном спуске груза в режиме противовключения изображена на рисунке. Для торможения противовключением при реактивном моменте сопротивления необходимо на ходу двигателя изменить порядок следования фаз питающего напряжения и одновременно ввести в цепь ротора добавочное сопротивление с целью ограничения первоначального броска тока и одновременного увеличения тормозного момента. Механическая характеристика в этом случае выглядит так, как показано на рисунке. Торможение противовключением КЗАД при реактивном моменте сопротивления не эффективно, так как начальный тормозной момент при скольжении, близком к 2, из-за большого реактивного сопротивления, равного , будет незначительным (см. рис. отрезок ).
в) динамическое торможение с независимым возбуждением постоянным током
При отключении обмотки статора АД от сети, сохраняется лишь незначительный магнитный поток от остаточного намагничивания стали статора. ЭДС наводимая во вращающемся роторе и ток в роторе будут весьма малыми. Взаимодействие тока ротора с потоком от остаточного намагничивания не может создать сколько-нибудь значительного электромагнитного момента. Поэтому для получения должного тормозного момента необходимо искусственно создать надлежащий магнитный поток статора. Это может быть достигнуто подачей в обмотки статора постоянного тока или подключением к ним конденсаторов или тиристорного преобразователя частоты, обеспечивающего протекание по обмоткам статора емкостного тока, т.е. опережающего тока, создающего эффект емкости. В 1-м случае будет иметь место режим динамического торможения с независимым возбуждением, во 2-м – с самовозбуждением.
При динамическом торможении с независимым возбуждением обмотки статора отключаются от сети трехфазного тока и подключаются к источнику постоянного тока. Этот ток создает неподвижный в пространстве магнитный поток, который при вращении ротора наведет в последнем ЭДС. Под действием ЭДС в обмотках ротора потечет ток, от взаимодействия которого с неподвижным потоком возникает тормозной момент. Двигатель превращается в синхронный генератор с неявновыраженными полюсами, работающий при переменной скорости.
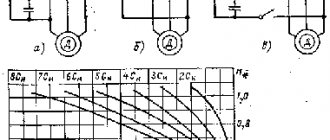
Симметричное включение 3-х обмоток статора в сеть постоянного тока невозможно без их переключений. Обычно используется одна из схем, приведенных на рис.
Поскольку при питании постоянным током обмотки обладают только омическим сопротивлением, для получения нужного значения тока достаточно небольшого по величине напряжения. В качестве источника постоянного тока для двигателей небольшой и средней мощности используются полупроводниковые выпрямители, а для крупных двигателей могут использоваться специальные генераторы постоянного тока низкого напряжения.
Для вывода уравнения механической характеристики АД в режиме динамического торможения режим синхронного генератора, в который превращается АД после подключения к источнику постоянного тока, целесообразно заменить эквивалентным режимом АД, полагая, что его статор вместо постоянного питается переменным током. При такой замене МДС создается совместно обмотками статора и ротора и должно быть соблюдено равенство МДС для обоих случаев, т.е. FПОСТ=FПЕР. Определение МДС, создаваемой постоянным током IПОСТ для схемы “а”, поясняет рис. и векторная диаграмма, изображенные рядом.
. Амплитуда МДС, создаваемой переменным током I1 при протекании его по обмоткам статора: . Исходя из условия . Отсюда значение переменного тока, эквивалентного постоянному: , а . Необходимые напряжения и мощность постоянного тока : .
Определив ток I1, машину в тормозном режиме можно представить как нормальный АД. Однако, работа АМ в режиме динамического торможения существенно отличается от работы в нормальном двигательном режиме. В двигательном режиме намагничивающий ток и магнитный поток при изменении скольжения практически не изменяются. При динамическом торможении магнитный поток при изменении скольжения меняется вследствие непрерывного изменения результирующей МДС, складывающейся из неизменной МДС статора (постоянного тока) и меняющейся МДС ротора (переменного тока переменной частоты).
Результирующий намагничивающий ток, приведенный к числу витков обмотки статора . Из векторной диаграммы токов следует:
Возведя в квадрат Эти выражения и почленно складывая, получим: .Намагничивающий ток равен .
В приведенной машине , где E2’ – ЭДС ротора при синхронной скорости w0, соответствующей частоте сети. При w отличной от w0, ЭДС ротора будет равна: , где n — относительная скорость или иначе – скольжение в режиме динамического торможения. При этом уравнение равновесия ЭДС для роторной цепи имеет вид: , а намагничивающий ток, выраженный через E2’: .
Полное сопротивление ротора с учетом того, что его индуктивное сопротивление изменяется с изменением скорости вращения ротора: .
Учитывая, что и подставляя значения Im, siny2 и Z2’ в уравнение для I12, из полученного соотношения находится ток I2’, который будет равен: .
Электромагнитный момент, развиваемый двигателем, выраженный через электромагнитную мощность: , где m1 – число фаз обмотки статора.
Из выражения для М видно, что момент при динамическом торможении определяется переменным током I1, эквивалентным постоянному, протекающему по обмоткам статора.
Взяв производную и приравняв ее к 0, найдем, что момент будет максимален при относительной скорости: , а значение этого момента, также называемого критическим, равно: .
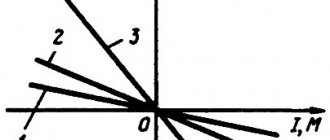
Механические характеристики при различном значении постоянного тока и различном сопротивлении роторной цепи изображены на рисунке. Кривые 1 и 2 соответствуют одинаковому значению сопротивления цепи ротора и различным значениям постоянного тока в статоре, а кривые 3 и4 – тем же значениям постоянного тока, но большему сопротивлению цепи ротора.
Из выражения для МК следует, что критический момент двигателя в режиме динамического торможения не зависит от активного сопротивления цепи ротора.
Разделив значение М на значение МК, уравнению механической характеристики можно придать вид: .
АД может работать во всех трех тормозных режимах:
а) с рекуперацией энергии в сеть;
б) противовключение;
в) динамическое торможение.
а) Торможение с рекуперацией энергии в сеть .
При отсутствии внешнего статического момента на валу двигатель, подключенный к сети будет вращаться со скоростью, близкой к синхронной. При этом из сети потребляется энергия, необходимая для покрытия потерь. Если за счет внешней силы ротор вращается с синхронной скоростью, то сеть будет покрывать только потери в статоре, а потери в роторе (механические и в стали) будут покрываться внешней силой.
В двигательном режиме, когда вращающееся магнитное поле пересекает проводники обмоток статора и ротора в одинаковом направлении, ЭДС статора Е1 и ротора Е2 совпадают по фазе. При w=w0 ЭДС в роторе не наводится, т.е. равна 0. При w>w0 проводники обмотки статора пересекаются вращающимся полем в прежнем направлении, а проводники ротора – в противоположном.
ЭДС ротора Е2 меняет свой знак на обратный; машина переходит в генераторный режим с рекуперацией энергии. Что касается тока, то изменяет свое направление только его активная составляющая. Реактивная составляющая при отрицательном скольжении сохраняет свое направление. Это видно и из выражения для тока ротора (при S<0 S2>0).
Такие же выводы можно сделать и на основе анализа активной (электромагнитной) и реактивной мощностей. Действительно, из выражения для РЭМ следует, что при S<0 PЭМ>0 Т.е. активная мощность меняет направление (передается в сеть), а из выражения для Q2 следует, что при S<0 реактивная мощность вторичного контура Q2 сохраняет свой знак независимо от режима работы машины.
Это значит, что асинхронная машина как в двигательном, так и в генераторном режиме потребляет реактивную мощность, необходимую для создания магнитного поля.
Торможение с отдачей энергии в сеть используется в подъемно-транспортных установках, при спуске тяжелых грузов. Под действием груза ротор машины будет вращаться со скоростью w>w0, машина переходит в генераторный режим и начинает создавать тормозной момент. При равенстве M=Mc груз будет опускаться с установившейся скоростью wc, как показано на рисунке. Необходимо иметь в виду, что для обеспечения нормального спуска груза Mc не должен превышать критический момент в генераторном режиме. При реактивном моменте сопротивления кратковременно режим с рекуперацией энергии в сеть можно получить, если АД допускает переключение обмотки статора с одной пары полюсов на другую, как показано на приведенном графике.
Режим с рекуперацией имеет место на участке ВС после переключения обмотки статора с числа пар полюсов rП=1 на rП=2 .
б) торможение противовключением.
В режиме противовключения ротор двигателя вращается в направлении, противоположном действию момента двигателя. Его скольжение S>1, а частота тока в роторе больше частоты питающей сети ( ). Поэтому несмотря на то, что ток ротора больше номинального в 7 –9 раз, т.е. больше пускового тока, момент в следствие большой частоты тока, следовательно большого индуктивного сопротивления роторной цепи ( ), будет невелик. Поэтому для увеличения момента и одновременного уменьшения тока в цепь ротора включают большое добавочное сопротивление, величину которого можно подсчитать по выражению
Где Е20 — номинальная ЭДС ротора при S=1
Sн – номинальное скольжение
Sн и – скольжение при номинальной нагрузке на искусственной характеристике.
При спуске груза в режиме противовключения торможение протекает на прямолинейном участке механической характеристики, жесткость которой определяется активным сопротивлением в цепи ротора. Механическая характеристика АД при тормозном спуске груза в режиме противовключения изображена на рисунке. Для торможения противовключением при реактивном моменте сопротивления необходимо на ходу двигателя изменить порядок следования фаз питающего напряжения и одновременно ввести в цепь ротора добавочное сопротивление с целью ограничения первоначального броска тока и одновременного увеличения тормозного момента. Механическая характеристика в этом случае выглядит так, как показано на рисунке. Торможение противовключением КЗАД при реактивном моменте сопротивления не эффективно, так как начальный тормозной момент при скольжении, близком к 2, из-за большого реактивного сопротивления, равного , будет незначительным (см. рис. отрезок ).
в) динамическое торможение с независимым возбуждением постоянным током
При отключении обмотки статора АД от сети, сохраняется лишь незначительный магнитный поток от остаточного намагничивания стали статора. ЭДС наводимая во вращающемся роторе и ток в роторе будут весьма малыми. Взаимодействие тока ротора с потоком от остаточного намагничивания не может создать сколько-нибудь значительного электромагнитного момента. Поэтому для получения должного тормозного момента необходимо искусственно создать надлежащий магнитный поток статора. Это может быть достигнуто подачей в обмотки статора постоянного тока или подключением к ним конденсаторов или тиристорного преобразователя частоты, обеспечивающего протекание по обмоткам статора емкостного тока, т.е. опережающего тока, создающего эффект емкости. В 1-м случае будет иметь место режим динамического торможения с независимым возбуждением, во 2-м – с самовозбуждением.
При динамическом торможении с независимым возбуждением обмотки статора отключаются от сети трехфазного тока и подключаются к источнику постоянного тока. Этот ток создает неподвижный в пространстве магнитный поток, который при вращении ротора наведет в последнем ЭДС. Под действием ЭДС в обмотках ротора потечет ток, от взаимодействия которого с неподвижным потоком возникает тормозной момент. Двигатель превращается в синхронный генератор с неявновыраженными полюсами, работающий при переменной скорости.
Симметричное включение 3-х обмоток статора в сеть постоянного тока невозможно без их переключений. Обычно используется одна из схем, приведенных на рис.
Поскольку при питании постоянным током обмотки обладают только омическим сопротивлением, для получения нужного значения тока достаточно небольшого по величине напряжения. В качестве источника постоянного тока для двигателей небольшой и средней мощности используются полупроводниковые выпрямители, а для крупных двигателей могут использоваться специальные генераторы постоянного тока низкого напряжения.
Для вывода уравнения механической характеристики АД в режиме динамического торможения режим синхронного генератора, в который превращается АД после подключения к источнику постоянного тока, целесообразно заменить эквивалентным режимом АД, полагая, что его статор вместо постоянного питается переменным током. При такой замене МДС создается совместно обмотками статора и ротора и должно быть соблюдено равенство МДС для обоих случаев, т.е. FПОСТ=FПЕР. Определение МДС, создаваемой постоянным током IПОСТ для схемы “а”, поясняет рис. и векторная диаграмма, изображенные рядом.
. Амплитуда МДС, создаваемой переменным током I1 при протекании его по обмоткам статора: . Исходя из условия . Отсюда значение переменного тока, эквивалентного постоянному: , а . Необходимые напряжения и мощность постоянного тока : .
Определив ток I1, машину в тормозном режиме можно представить как нормальный АД. Однако, работа АМ в режиме динамического торможения существенно отличается от работы в нормальном двигательном режиме. В двигательном режиме намагничивающий ток и магнитный поток при изменении скольжения практически не изменяются. При динамическом торможении магнитный поток при изменении скольжения меняется вследствие непрерывного изменения результирующей МДС, складывающейся из неизменной МДС статора (постоянного тока) и меняющейся МДС ротора (переменного тока переменной частоты).
Результирующий намагничивающий ток, приведенный к числу витков обмотки статора . Из векторной диаграммы токов следует:
Возведя в квадрат Эти выражения и почленно складывая, получим: .Намагничивающий ток равен .
В приведенной машине , где E2’ – ЭДС ротора при синхронной скорости w0, соответствующей частоте сети. При w отличной от w0, ЭДС ротора будет равна: , где n — относительная скорость или иначе – скольжение в режиме динамического торможения. При этом уравнение равновесия ЭДС для роторной цепи имеет вид: , а намагничивающий ток, выраженный через E2’: .
Полное сопротивление ротора с учетом того, что его индуктивное сопротивление изменяется с изменением скорости вращения ротора: .
Учитывая, что и подставляя значения Im, siny2 и Z2’ в уравнение для I12, из полученного соотношения находится ток I2’, который будет равен: .
Электромагнитный момент, развиваемый двигателем, выраженный через электромагнитную мощность: , где m1 – число фаз обмотки статора.
Из выражения для М видно, что момент при динамическом торможении определяется переменным током I1, эквивалентным постоянному, протекающему по обмоткам статора.
Взяв производную и приравняв ее к 0, найдем, что момент будет максимален при относительной скорости: , а значение этого момента, также называемого критическим, равно: .
Механические характеристики при различном значении постоянного тока и различном сопротивлении роторной цепи изображены на рисунке. Кривые 1 и 2 соответствуют одинаковому значению сопротивления цепи ротора и различным значениям постоянного тока в статоре, а кривые 3 и4 – тем же значениям постоянного тока, но большему сопротивлению цепи ротора.
Из выражения для МК следует, что критический момент двигателя в режиме динамического торможения не зависит от активного сопротивления цепи ротора.
Разделив значение М на значение МК, уравнению механической характеристики можно придать вид: .
Основные виды динамического торможения
Организация принудительной остановки асинхронного двигателя по электрическому принципу может быть осуществлена несколькими способами:
- Электродинамическим. Это классический вариант, при котором две фазы нужно закоротить и перевести на питания от цепи постоянного тока,
- Рекуперативным (генераторным). Характеризуется возвратом лишней электроэнергии в сеть,
- Противовключением. Этот вариант реализуется по схеме реверса, то есть с подключением фаз через пару магнитных пускателей,
- Самовозбуждением. Подключением к обмоткам статора батареи конденсаторов.
Генераторное торможение асинхронного двигателя
Асинхронные двигатели используются с такими производственными механизмами, под действием которых их скорость вращения не может стать больше ω0, другими словами, двигатель не может перейти в генераторный режим под действием производственного механизма. Генераторный режим возникает в асинхронных двигателях, скорость которых регулируется изменением числа пар полюсов. В момент переключения с одного числа пар полюсов на другое в цепи статора двигателя происходит бросок тока, и он переходит в генераторный режим работы.
Характеристика асинхронного двигателя при рекуперативном (генераторном) торможении.
Классическое динамическое торможение
Эффективность такого режима работы зависит от расчета и значения следующих параметров:
- Величина тока, который подается через параллельную цепь на обмотки статора. Чем выше этот показатель, тем больше момент торможения,
- Величина сопротивления, которое вводится в цепь ротора. Чем выше по расчету сопротивление, тем быстрее тормозится двигатель,
- Величина магнитной движущей силы (МДС). Иногда ее называют ампер витками, поскольку расчет ведется по формуле F = I×W, где I – величина тока, а W – количество витков.
Обмотка статора при этом может подключаться как минимум пятью разными способами:
- Треугольником,
- Треугольником с закороченными фазами,
- Звездой,
- Звездой с закороченным нулем,
- Звездой с закороченными двумя фазами.
В каждом случае на основании векторной диаграммы ведется расчет МДС, тормозного сопротивления и напряжения цепи.
Как подобрать тормозной резистор для преобразователя частоты
Приводы кранов, конвейеров и другого промышленного оборудования, работающего в повторно-кратковременных режимах с частыми включениями, отключениями и реверсами, оснащают тормозными устройствами, которые обеспечивают быструю остановку электродвигателя. Для этого используются электродинамический и механический метод.
Электродинамическое торможение достигается:
- Подачей постоянного напряжения на обмотки статора. При этом возникает неподвижное магнитное поле, создающее тормозной момент.
- Изменением порядка подключения фаз. Магнитное поле начинает вращаться в направлении, противоположном направлению вращения ротора электрической машины.
В обоих случаях на валу электродвигателя возникает отрицательный момент, обеспечивающий быструю остановку. Это необходимо для инерционных механизмов с высокой нагрузкой.
Во многих промышленных системах двигатели останавливаются просто естественным замедлением . Время, затрачиваемое на это, зависит исключительно от инерции и сопротивляющего момента вращения двигателя. Однако часто приходится сокращать время, а электрическое торможение — простое и эффективное решение.
Электрическое торможение асинхронных двигателей — Руководство (фото кредит: Крис Шонц через Flickr)
По сравнению с механическими и гидравлическими тормозными системами, он имеет преимущество устойчивости и не требует износа деталей.
Опции электрической торможения, приведенные в этой статье //
- Противоточное торможение Двигатель с короткозамкнутым ротором
- Двигатель скользкого кольца
Противоточное торможение. Принцип
Мотор изолирован от электросети, пока он все еще работает, а затем снова подключается к нему наоборот. Это очень эффективная тормозная система с крутящим моментом, обычно превышающим пусковой момент, который должен быть остановлен достаточно рано, чтобы двигатель не двигался в противоположном направлении.
Несколько автоматических устройств используются для управления остановкой, как только скорость почти равна нулю:
- Детекторы остановки трения, центробежные стоп-детекторы,
- Хронометрические устройства,
- Частотные измерения или реле напряжения ротора (моторы с проскальзывающим кольцом) и т. Д.
1.1 Двигатель с короткозамкнутым ротором
Прежде чем выбирать эту систему (рис. 1), важно обеспечить, чтобы двигатель мог противостоять противоточному торможению с требуемой нагрузкой. Помимо механического напряжения этот процесс подвергает ротор воздействию высоких тепловых нагрузок, так как энергия, выделяемая при каждой операции торможения (энергия скольжения от сети и кинетической энергии), рассеивается в клетке.
Тепловое напряжение при торможении в три раза больше, чем при сборе скоростей .
Рисунок 1 — Принцип противоточного торможения
При торможении пики тока и крутящего момента заметно выше, чем при пуске.
Для плавного торможения резистор часто устанавливается последовательно с каждой фазой статора при переключении на противоточное. Это уменьшает крутящий момент и ток, как при старте статора. Недостатки противоточного торможения в двигателях с короткозамкнутым ротором настолько велики, что эта система используется только для некоторых целей с маломощными двигателями .
1.2 Мотор скольжения
Чтобы ограничить ток и крутящий момент, прежде чем статор переключится на противоточное, крайне важно повторно вставить резисторы ротора, используемые для запуска, и часто добавлять дополнительную секцию торможения (см. Рисунок 2).
Рисунок 2 — Принцип противоточного торможения в асинхронной машине скольжения
При правильном роторном резисторе легко регулировать тормозной момент до требуемого значения. Когда ток переключается, напряжение ротора практически в два раза больше, чем когда ротор находится в состоянии покоя, что иногда требует особых мер предосторожности при изоляции.
Как и в случае с силовыми двигателями, в цепи ротора выделяется большое количество энергии . Он полностью рассеивается (минус несколько потерь) в резисторах.
Двигатель может быть остановлен автоматически одним из вышеупомянутых устройств или с помощью реле напряжения или частоты в цепи ротора. С помощью этой системы можно поддерживать ведущую нагрузку с умеренной скоростью. Характеристика очень неустойчива (широкие вариации в скорости против небольших колебаний крутящего момента).
Вернитесь к параметрам электрического торможения ↑
Торможение при вводе постоянного тока
Эта электрическая тормозная система используется на моторах скольжения и двигателя с короткозамкнутым ротором (см. Рис. 3). По сравнению с противоточной системой цена источника выпрямленного тока компенсируется меньшим количеством резисторов . Благодаря электронным регуляторам скорости и стартерам этот параметр торможения не добавляет к стоимости.
Процесс включает в себя изолирование статора от сети и подачу на него выпрямленного тока . Выпрямленный ток создает фиксированный поток в воздушном зазоре двигателя. Для значения этого потока для обеспечения надлежащего торможения ток должен быть примерно в 1, 3 раза больше номинального тока.
Избыток тепловых потерь, вызванных этим небольшим превышением тока, обычно компенсируется паузой после торможения .
Рекуперативное торможение
Режим рекуперативного торможения
Поскольку избыток электроэнергии, который высвобождается в процессе торможения, направляется обратно в сеть через мост/батарею конденсаторов, то этот режим работы считается наиболее экономичным. Наиболее часто этот способ применяется в подъемно-транспортной технике и оборудовании, которое работает на перемещение грузов или собственного веса под уклон. Классический пример – лифт, где рекуперативное торможение приводного двигателя используется для начального подтормаживания. Также подобная схема широко используется в электрифицированном транспорте, например, в трамваях, троллейбусах, электричках. Применяют ее и в специальной технике, например, экскаваторах, широко используемых на строительстве мостов, дорог, зданий и т. п.
Принцип расчета и организации генераторного режима заключается в превышении частотой вращения ротора ее синхронного значения. В таком случае электромагнитный момент меняет направление, что приводит к торможению.
Торможение противовключением
Схема торможения противовключением
На практике режим противовключения может быть организован несколькими разными способами. Классическим является использование пары магнитных пускателей, подключенных по реверсной схеме. В этом случае, быстрая остановка агрегата осуществляется за счет изменения положения фаз (противовключение).
Основной пускатель КМ2 производит отключение двигателя М от сети. После этого параллельный пускатель КМ1 опять включает двигатель, меняя при это крайние фазы местами, то есть заставляя его вращаться в обратную сторону. Чтобы не допустить чрезмерного перегрева в цепь может быть введено дополнительное сопротивление. Также схема противовключения может быть реализована, если двигатель использовать в качестве тормоза для груза.
Торможение самовозбуждением
Схема торможения самовозбуждением
Этот вариант реализуется за счет подключения обмоток статора к параллельной конденсаторной батарее или мосту (расчет емкости придется вести). Когда двигатель отключается от сети и должен наступить режим выбега, угасающее магнитное поле начинает питать конденсаторы, а через них возвращается обратно в обмотку, создавая тормозной момент.
Как можно видеть, на практике используется целая гамма специфических режимов работы асинхронных двигателей, которыми можно добиться быстрой и точной его остановки. При частых пусках и остановках динамическое, рекуперативное, реверсное (на пускателях) или конденсаторное торможение (через расчет моста или батареи) могут повысить эффективность работ оборудования и снизить потери времени.