У двигателей постоянного тока с последовательным возбуждением, также как и у двигателей с независимым возбуждением, используется два способа торможения: динамическое (реостатное)
торможение и торможение
противовключением
.
Учитывая особенности двигателей постоянного тока с последовательным возбуждением, у них можно осуществить два вида реостатного торможения: торможение с независимым возбуждением
и торможение с
самовозбуждением
.
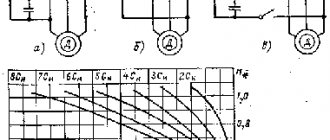
Торможение в режиме независимого возбуждения
При торможении в режиме независимого возбуждения, обмотка возбуждения отключается от обмотки якоря и подключается к постороннему источнику постоянного тока, а якорь электродвигателя отключается от сети и замыкается на тормозное сопротивление.
Схема двигателя постоянного тока последовательного возбуждения при динамическом торможении в режиме независимого возбуждения.
Характеристики в тормозных режимах описываются уравнениями:
ω = (Iа·Rа) / (CM·Фδ)
ω = -[(M·Rа) / (CM·Фδ)2]
Это прямые линии, проходящие через начало координат. Наклон этих линий зависит от величины добавочных сопротивлений, включаемых в цепь якоря.
Характеристики двигателя постоянного тока последовательного возбуждения при динамическом торможении в режиме независимого возбуждения. Rдоб.3>Rдоб.2>Rдоб.1
Режим рекуперативного торможения
Режимом рекуперативного торможения называют такой режим, когда электродвигатель при определенных режимах работы привода, в силу своей обратимости, становится генератором, преобразуя кинетическую энергию движущихся масс механизма в электрическую с отдачей ее в питающую сеть.
Переход электродвигателя в генераторный режим с отдачей энергии в сеть возможен при скорости привода, превышающей скорость соответствующего идеального холостого хода. При этом ЭДС двигателя, направленная встречно с напряжением сети, становится больше его и ток в якоре электродвигателя меняет направление на обратное. Практически режим рекуперативного торможения может быть осуществлен:
1) при наличии отрицательного статического момента нагрузки, когда электродвигатель под его действием в сторону вращения, получив ускорение, достигает скорости, превышающей скорость идеального холостого хода (рис.7);
2) при переходе электродвигателя с большей скорости, полученной ослаблением потока двигателя, на меньшую за счет резкого увеличения магнитного потока (участок w2 – w0 характеристики 1 на рис.8).
Уравнение механической характеристики для данного режима можно получить из (4), полагая в нем М
= —
М
Т :
. (10)
Из уравнения (10) следует, что механические характеристики в данном режиме при различных сопротивлениях резисторов в якорной цепи электродвигателя являются продолжением характеристик двигательного режима в области второго квадранта (рис.7). С увеличением скорости w при неизменном R
величина тормозного момента возрастает. Увеличение сопротивления внешнего резистора в цепи якоря при неизменном отрицательном статическом моменте на валу электродвигателя приводит к увеличению скорости вращения привода.
Рис. 7 Рис. 8 |
Переход из двигательного режима в режим рекуперации при резком увеличении потока возбуждения двигателя приведен на рис.8.
1. Ознакомиться с электрооборудованием установки (см. рис. 9).
2. Рассчитать величины сопротивлений тормозных резисторов для режимов динамического торможения и торможения противовключением при I
/
I
H=2 и
I
/
I
H=2,5.
3. Снять и построить механические характеристики электродвигателя постоянного тока с независимым возбуждением:
а) естественную;
б) искусственные при добавочных резисторах в цепи якоря электродвигателя сопротивлением R
1=5 Ом и
R
2=10 Ом;
в) искусственные при токах возбуждения I
В=0,9
I
ВH и
I
В=0,7
I
ВH;
4. Снять характеристики электродвигателя:
а) для режима динамического торможения и торможения противовключением при сопротивлениях тормозных резисторов, рассчитанных в п.2;
б) для режима рекуперативного торможения при добавочных резисторах в цепи якоря электродвигателя сопротивлением R
1=0 и
R
2=5 Ом.
5. По характеристикам w = f
(
t
) и
I
Я =
f
(
t
) рассчитать и построить механические характеристики w(
М
) для всех тормозных режимов.
6. По аналитическим формулам рассчитать и построить естественную и искусственную механические характеристики w = f
(
М
) при
U=U
H и
R
Я=5 Ом.
| Тип | Р Н, кВт | U H, В | I H, А | R Я, Ом | n H, об/мин |
| П22 | 1,0 | 220 | 5,9 | 4,17 | 1500 |
1. До начала проведения исследований сопротивления тормозных резисторов рассчитываются по уравнениям :
— для режима динамического торможения
; (11)
— для режима противовключения
, (12)
где R
Н=
U
H/
I
H — номинальное сопротивление двигателя ; w0=
U
H/
K
.
2. При снятии скоростных характеристик w = f
(
I
) в двигательном режиме достаточно получить 3-4 точки.
3. Скоростные характеристики двигателя в тормозных режимах рассчитываются по диаграммам зависимостей w = f
(
t
) и
I
Я =
f
(
t
), полученным с использованием осциллографа.
Рис.9. Схема электрическая принципиальная лабораторной установки |
При снятии характеристик w = f
(
t
) и
I
Я =
f
(
t
) в тормозных режимах необходимо включить исследуемый двигатель, довести его скорость вращения до номинального значения, установить требуемое тормозное сопротивление, а для режима рекуперативного торможения ослаблением потока возбуждения двигателя довести его скорость вращения до 2000 об/мин, включить осциллограф и нажать одну из
кнопок «ДТ», «ПВ» или «РТ», в зависимости от режима работы на время протекания переходного процесса.
Для перехода от скоростных характеристик к механическим связь между током и моментом определяется из уравнения (2). При токе возбуждения двигателя, отличном от номинального значения, следует определить новое значение , где С
— значение коэффициента двигателя, определяемого из уравнения (6).
Кривая намагничивания исследуемого электродвигателя приведена на рис. 10.
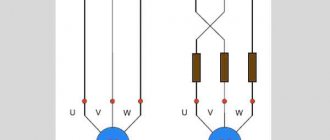
Торможение с самовозбуждением
При торможении с самовозбуждением обмотка возбуждения не отключается от якоря, а переключается с помощью схемы управления таким образом, чтобы направление тока в обмотке возбуждения осталось таким же, как и в двигательном режиме.
Схема двигателя постоянного тока последовательного возбуждения при динамическом торможении с самовозбуждением.
Характеристики двигателя постоянного тока последовательного возбуждения при динамическом торможении с самовозбуждением. Rдоб.3>Rдоб.2>Rдоб.1
Для возникновения и существования режима самовозбуждения необходимо соблюдение такого условия, как наличие остаточного магнетизма, и поток остаточного магнетизма должен совпадать по направлению с основным магнитным потоком, именно поэтому необходимо сохранить направление магнитного потока таким же, каким оно было в двигательном режиме.
Торможение в режиме самовозбуждения происходит медленнее, чем в режиме независимого возбуждения, так как тормозные характеристики нелинейные.
Электропривод с двигателями постоянного тока (стр. 10 )
Схемы с шунтированием якоря ДПТ последовательного возбуждения применяются для обеспечения низких скоростей движения, а также получения определенной скорости идеального холостого хода ДПТ последовательного возбуждения. Такие схемы нашли применение в электрическом транспорте, электроприводе грузоподъемных машин и ряде других случаев.
3.19. ТОРМОЖЕНИЕ ДПТ ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ
Для ДПТ последовательного возбуждения возможны два варианта тормозного режима: при его работе генератором последовательно с сетью (режим торможения противовключением) и независимо от сети (режим динамического торможения).
Торможение противовключением
ДПТ последовательного возбуждения, как и для ДПТ независимого возбуждения, может быть осуществлено двумя путями. Один из них связан с изменением полярности напряжения на обмотке якоря при сохранении того же направления тока в обмотке возбуждения. Одновременно с этим для ограничения переходного тока в цепь якоря ДПТ вводится дополнительный резистор
R
д.
В результате выполнения этих операций ДПТ (рис. 381) перейдет с естественной характеристики 1
на характеристику
2,
участок
bс
которой соответствует режиму торможения противовключением.
Торможение противовключением также реализуется в том случае, когда ДПТ последовательного возбуждения будет нагружен активным моментом М
с, превышающим момент короткого замыкания
М
к,з. Рассмотрим этот способ с помощью рис. 3.81.
Допустим, что ДПТ в исходном режиме работает в точке а
на характеристике
1
, преодолевая активный момент нагрузки
М
с. Если теперь, не изменяя полярность напряжения на ДПТ, ввести в его якорную цепь дополнительный резистор
R
д, то ДПТ будет иметь характеристику вида
3
. Так как момент ДПТ при этом стал меньше момента нагрузки, то он начнет вначале тормозиться, а затем и разгоняться в противоположном направлении, пока в точке
d
моменты нагрузки
М
с и ДПТ не сравняются. Двигатель при этом будет работать в режиме торможения противовключением.
Динамическое торможение
ДПТ последовательного возбуждения реализуется в двух схемах его включения.
В первой схеме (рис. 3 82, а
) обмотка возбуждения ОД через дополнительный резистор
R
в подключается к источнику постоянного тока, а обмотка якоря замыкается на резистор
R
д. Получается схема, типичная для ДПТ независимого возбуждения, в которой ДПТ последовательного возбуждения имеет характеристики, изображенные на рис. 3.82,
б
.
Специфичным для ДПТ последовательного возбуждения является динамическое торможение с самовозбуждением, которое реализуется по схеме рис. 3.83. Для возникновения и существования режима самовозбуждения необходимо выполнение следующих условий: 1) наличие остаточного магнитного потока в ДПТ Фост; 2) совпадение по направлению Фост и магнитного потока Ф, создаваемого током возбуждения; 3) замкнутая цепь якоря; 4) скорость ДПТ должна быть отличной от нуля;
5) наводимая в якоре ЭДС должна быть равна суммарному падений напряжения в резисторах якорной цепи, т. е. E=IR
.
При выполнении этих условий торможение самовозбуждением происходит следующим образом Вследствие наличия остаточного магнитного поля при вращении якоря в нем наводится ЭДС, под действием которой по якорю и обмотке возбуждения ДПТ протекает ток. Этот ток создает основной магнитный поток Ф, который, совпадая по направлению с остаточным потоком Фост, приведет к увеличению ЭДС. Это, в свою очередь, повлечет за собой увеличение тока в ДПТ, и такой процесс самовозбуждения ДПТ будет продолжаться до тех пор, пока ЭДС не станет равной суммарному падению напряжения в цепи якоря.
Статические характеристики ДПТ последовательного возбуждения в этом режиме можно получить графоаналитическим способом, использовав условие E=IR
. Для этого на одной плоскости (рис. 3.84,
а
) совмещаются характеристики холостого хода
Е(I),
представляющие собой зависимость ЭДС машины от тока возбуждения при фиксированной скорости якоря w=const, и вольт-амперная характеристика цепи якоря
IR(I)
.
Точки пересечения этих характеристик соответствуют установившемуся режиму при данных параметрах цепи якоря ДПТ и его скорости. Так, при суммарном сопротивлении цепи якоря R
1 точками установившегося режима являются точки
1
2 и 3, а при другом, большем сопротивлении цепи якоря
R
2
>R
1
–
точки
4
и
5
.
Если теперь использовать координаты этих точек установившегося режима, а именно значения скорости и тока, то можно получить искомые статические электромеханические характеристики ДПТ. На рис. 3.84, б
выполнено это построение, в результате которого получены электромеханические характеристики для двух принятых значений суммарного сопротивления цепи якоря
R
1 и
R
2. Механические характеристики ДПТ последовательного возбуждения могут быть получены из электромеханических характеристик при использовании универсальных характеристик.
Отметим, что для режима торможения с самовозбуждением существует определенное критическое сочетание параметров, соответствующее границе этого режима. Такому критическому сочетанию на рис. 3.84, а
при сопротивлении цепи якоря
R
1 соответствует скорость w4=wкр1 (при сопротивлении
R
2
–
скорость w3=wкр2). При меньших скоростях самовозбуждение ДПТ не наступает.
Режим торможения с самовозбуждением используется для интенсивного электрического торможения в электроприводах транспортных в грузоподъемных машин.
3.20.
СХЕМА УПРАВЛЕНИЯ ДПТ ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ
Релейно-контакторные схемы управления ДПТ последовательного возбуждения при пуске, реверсе и торможении выполняются по тем же принципам времени, скорости (ЭДС), тока и пути, что и для других видов ДПТ. Многие типовые узлы, которые были рассмотрены ранее, могут быть использованы в электроприводе с ДПТ последовательного возбуждения,
Рассмотрим схему управления ДПТ последовательного возбуждения, показанную на рис. 3.85 Эта схема обеспечивает пуск ДПТ в две ступени по принципу времени и реверс или торможение противовключением по принципу ЭДС. Схема включает в себя пять однополюсных контакторов КМ, КМ1, КМ2, КМЗ, КМ4
; два контактора ускорения
КМ5
и
КМ6,
контактор противовключения
КМ7;
реле противовключения
KVI
и
KV2
; реле времени
КТ1
и
КТ2;
выключатели
QF1
и
QF2.
Органом управления в схеме является командоконтроллер SA,
имеющий три положения: нулевое, «Вперед» и «Назад». Защиту электропривода обеспечивают максимальные реле
КА1, КА2,
реле напряжения
KV
и предохранители
FA
. Реле противовключения
KVI
и
KV2
настраиваются таким же образом, что и в схеме рис 3 45,
а
.
Пуск ДПТ, например, в условном направлении «Вперед» осуществляется переводом командоконтроллера SA
в положение «Вперед» Если защита находится в исходном положении, то это приведет к срабатыванию аппаратов
КМ, КМ1, КМ2
и подключению ДПТ к сети Возникшее за счет пускового тока падение напряжения на резисторах
R
п и
R
д1 вызовет включение реле
КТ1
и
КТ2,
которые разомкнут свои контакты в цепи аппаратов
КМ5
и
КМ6
.
Одновременно с этим сработает реле KVI
и своим контактом подаст питание на контактор
КМ7.
Последний, сработав, закоротит ступень противовключения
R
п и одновременно катушку реле
КТ1,
которое, потеряв питание, начнет отсчет выдержки времени. Далее в порядке, рассмотренном выше для аналогичных схем, в функции времени произойдет последовательное закорачивание ступеней пускового резистора
R
д1 и
R
д2.
Для реверса командоконтроллер SA
переставляется в положение «Назад». При его переходе в это положение отключаются аппараты
КМ1, КМ2, КМ7, КМ5, КМ6,
вводя в цепь якоря резисторы
R
п,
R
д1,
R
д2 и подготавливая тем самым ДПТ к реверсу или торможению
При последующем включении аппаратов КМ, КМ2, КМ4
изменяется полярность напряжения на якоре ДПТ, и он переходит в режим торможения противовключением. В соответствии со своей настройкой реле
KV2,
несмотря на замыкание контакта
КМ3
в своей цепи питания, не срабатывает, вследствие чего контакторы
КМ7, КМ5
и
КМ6
лишены питания и торможение происходит при полностью введенных в цепь якоря резисторах
R
п+
R
д1+
R
д2.
По мере снижения скорости растет напряжение на катушке реле КV2
(см рис 346,
б
), и при скорости, близкой к нулю, произойдет его срабатывание. Если при этом контроллер остается в положении «Назад», то начинается процесс разбега ДПТ в этом направлении с рассмотренным выше порядком работы схемы.
Если при достижении нулевой скорости переместить контроллер в среднее положение, то ДПТ будет отключен от сети и схема вернется в исходное положение.
В общем случае точный анализ переходных процессов в электроприводе с ДПТ последовательного возбуждения и получение зависимостей изменения координат во времени являются сложными задачами. Это определяется тем, что дифференциальные уравнения для якорной цепи двигателя и механической части привода являются нелинейными из-за наличия в них произведения двух переменных – тока и магнитного потока для момента и скорости и потока для ЭДС. Дополнительное усложнение исследования связано с нелинейной зависимостью магнитного потока от тока, выражаемой кривой намагничивания, а также нелинейностью характеристик ДПТ. В связи с этим точное исследование Переходных процессов в электроприводе возможно только с помощью вычислительных машин. В практических инженерных расчетах, как правило, пользуются различными приближенными способами получения кривых переходного процесса
3.21.
СХЕМА ВКЛЮЧЕНИЯ И ХАРАКТЕРИСТИКИ ДПТ СМЕШАННОГО ВОЗБУЖДЕНИЯ
Основная схема включения ДПТ смешанного возбуждения приведена на рис 3.86, а
. Двигатель имеет две обмотки возбуждения – последовательную
ОВП,
включенную последовательно с якорем, и независимую
ОВН
. Магнитный поток ДПТ вследствие этого представляет собой сумму двух составляющих – потока Фо, в,н, создаваемого
ОВН,
и потока Фо, в,п, создаваемого
ОВП
.
Зависимость обеих составляющих и суммарного потока ДПТ Ф в функции тока показана на рис 3.86, б
соответственно в виде штриховых линий
1
и
2
и сплошной линии
3
. Важно отметить, что при токе якоря, стремящемся к значению –
I
1
,
магнитный поток Ф стремится к нулю, т. е. ДПТ размагничивается.
Электромеханическая и механическая характеристики ДПТ смешанного возбуждения выражаются соответственно формулами (3.163) и (3.164), в которых магнитный поток Ф также есть функция тока.
Для получения участков характеристик при w>w0 (второй квадрант) проведем следующий дополнительный анализ.
1 При I
®-
I
1 (см рис 3.86,
б
) магнитный поток
Ф
®
0
и согласно (3.163) w®¥. Таким образом, вертикальная линия, соответствующая значению тока
I
=-
I
1, является асимптотой электромеханической характеристики, вид которой показан на рис 3.87,
а
.
2
Механическую характеристику ДПТ смешанного возбуждения во втором квадранте можно получить из рассмотрения формулы электромагнитного момента ДПТ постоянного тока (3.3) Из нее следует, что когда
I
®-
I
1
Ф
®
0
и w®¥, момент ДПТ стремится к нулю. Другими словами, ось скорости является асимптотой механической характеристики Так как при w=w0
М=0,
то на интервале скорости w0<w<¥ момент принимает экстремальное значение
Мтах
, а механическая характеристика имеет вид кривой, показанной на рис. 3.87,
б
.
Двигатель смешанного возбуждения, имея две обмотки возбуждения, сочетает в себе свойства как ДПТ независимого возбуждения, так и ДПТ последовательного возбуждения.
Двигатель смешанного возбуждения может работать во всех возможных режимах, а именно двигателем, генератором параллельно, последовательно и независимо от сети, а также в режимах холостого хода и короткого замыкания.
Регулирование координат ДПТ смешанного возбуждения может осуществляться всеми характерными для ДПТ способами, связанными с изменением магнитного потока, напряжения и сопротивления резистора в цепи якоря.
Управление ДПТ смешанного возбуждения осуществляется с помощью схем, рассмотренных применительно к ДПТ независимого и последовательного возбуждения.
Отметим, что из-за относительно невысоких технико-экономических показателей ДПТ смешанного возбуждения (высокая стоимость, повышенные масса, габариты и расход материалов) электропривод с ДПТ смешанного возбуждения применяется сравнительно редко.
| Из за большого объема этот материал размещен на нескольких страницах: 10 |