Дмитрий Левкин
- Трехфазный асинхронный двигатель с короткозамкнутым ротором Конструкция асинхронного электродвигателя
- Принцип работы трехфазного двигателя
- Скольжение асинхронного двигателя
- Трехфазный переменный ток
- Прямое подключение к сети питания
- Трехфазный асинхронный двигатель с фазным ротором Особенности конструкции
- Обозначение выводов ротора
- Пуск АДФР
Трехфазный асинхронный электродвигатель
— это асинхронный электродвигатель, который имеет трехфазную обмотку статора.
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Асинхронный двигатель с короткозамкнутым ротором
— это асинхронный электродвигатель, у которого ротор выполнен с короткозамкнутой обмоткой в виде беличьей клетки [1].
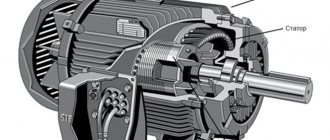
Конструкция асинхронного электродвигателя
Трехфазный асинхронный электродвигатель, как и любой электродвигатель, состоит из двух основных частей — статора и ротора. Статор — неподвижная часть, ротор — вращающаяся часть. Ротор размещается внутри статора. Между ротором и статором имеется небольшое расстояние, называемое воздушным зазором, обычно 0,5-2 мм.
Статор асинхронного двигателя
Ротор асинхронного двигателя
Статор
состоит из корпуса и сердечника с обмоткой. Сердечник статора собирается из тонколистовой технической стали толщиной обычно 0,5 мм, покрытой изоляционным лаком. Шихтованная конструкция сердечника способствует значительному снижению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. Обмотки статора располагаются в пазах сердечника.
Корпус и сердечник статора асинхронного электродвигателя
Конструкция шихтованного сердечника асинхронного двигателя
Ротор
состоит из сердечника с короткозамкнутой обмоткой и вала. Сердечник ротора тоже имеет шихтованную конструкцию. При этом листы ротора не покрыты лаком, так как ток имеет небольшую частоту и оксидной пленки достаточно для ограничения вихревых токов.
Принцип работы. Вращающееся магнитное поле
Принцип действия трехфазного асинхронного электродвигателя основан на способности трехфазной обмотки при включении ее в сеть трехфазного тока создавать вращающееся магнитное поле.
Вращающееся магнитное поле — это основная концепция электрических двигателей и генераторов.
Запустить
Остановить
Вращающееся магнитное поле асинхронного электродвигателя
Частота вращения этого поля, или синхронная частота вращения прямо пропорциональна частоте переменного тока f1 и обратно пропорциональна числу пар полюсов р трехфазной обмотки.
,
- где n1 – частота вращения магнитного поля статора, об/мин,
- f1 – частота переменного тока, Гц,
- p – число пар полюсов
Концепция вращающегося магнитного поля
Чтобы понять феномен вращающегося магнитного поля лучше, рассмотрим упрощенную трехфазную обмотку с тремя витками. Ток текущий по проводнику создает магнитное поле вокруг него. На рисунке ниже показано поле создаваемое трехфазным переменным током в конкретный момент времени
Запустить
Остановить
Магнитное поле прямого проводника с постоянным током
Магнитное поле создаваемое обмоткой
Составляющие переменного тока будут изменяться со временем, в результате чего будет изменяться создаваемое ими магнитное поле. При этом результирующее магнитное поле трехфазной обмотки будет принимать разную ориентацию, сохраняя при этом одинаковую амплитуду.
Магнитное поле создаваемое трехфазным током в разный момент времени Ток протекающий в витках электродвигателя (сдвиг 60°)
Запустить
Остановить
Вращающееся магнитное поле
Действие вращающегося магнитного поля на замкнутый виток
Теперь разместим замкнутый проводник внутри вращающегося магнитного поля. По закону электромагнитной индукции изменяющееся магнитное поле приведет к возникновению электродвижущей силы (ЭДС) в проводнике. В свою очередь ЭДС вызовет ток в проводнике. Таким образом, в магнитном поле будет находиться замкнутый проводник с током, на который согласно закону Ампера будет действовать сила, в результате чего контур начнет вращаться.
Влияние вращающегося магнитного поля на замкнутый проводник с током
Короткозамкнутый ротор асинхронного двигателя
По этому принципу также работает асинхронный электродвигатель. Вместо рамки с током внутри асинхронного двигателя находится короткозамкнутый ротор по конструкции напоминающий беличье колесо. Короткозамкнутый ротор состоит из стержней накоротко замкнутых с торцов кольцами.
Короткозамкнутый ротор «беличья клетка» наиболее широко используемый в асинхронных электродвигателях (показан без вала и сердечника)
Трехфазный переменный ток, проходя по обмоткам статора, создает вращающееся магнитное поле. Таким образом, также как было описано ранее, в стержнях ротора будет индуцироваться ток, в результате чего ротор начнет вращаться. На рисунке ниже Вы можете заметить различие между индуцируемыми токами в стержнях. Это происходит из-за того что величина изменения магнитного поля отличается в разных парах стержней, из-за их разного расположения относительно поля. Изменение тока в стержнях будет изменяться со временем.
Запустить
Остановить
Вращающееся магнитное поле пронизывающее короткозамкнутый ротор
Магнитный момент действующий на ротор
Вы также можете заметить, что стержни ротора наклонены относительно оси вращения. Это делается для того чтобы уменьшить высшие гармоники ЭДС и избавиться от пульсации момента. Если стержни были бы направлены вдоль оси вращения, то в них возникало бы пульсирующее магнитное поле из-за того, что магнитное сопротивление обмотки значительно выше магнитного сопротивления зубцов статора.
Скольжение асинхронного двигателя. Скорость вращения ротора
Отличительный признак асинхронного двигателя состоит в том, что частота вращения ротора n2 меньше синхронной частоты вращения магнитного поля статора n1.
Объясняется это тем, что ЭДС в стержнях обмотки ротора индуцируется только при неравенстве частот вращения n21. Частота вращения поля статора относительно ротора определяется частотой скольжения ns=n1-n2. Отставание ротора от вращающегося поля статора характеризуется относительной величиной s, называемой скольжением:
,
- где s – скольжение асинхронного электродвигателя,
- n1 – частота вращения магнитного поля статора, об/мин,
- n2 – частота вращения ротора, об/мин,
Рассмотрим случай когда частота вращения ротора будет совпадать с частотой вращения магнитного поля статора. В таком случае относительное магнитное поле ротора будет постоянным, таким образом в стержнях ротора не будет создаваться ЭДС, а следовательно и ток. Это значит что сила действующая на ротор будет равна нулю. Таким образом ротор будет замедляться. После чего на стержни ротора опять будет действовать переменное магнитное поле, таким образом будет расти индуцируемый ток и сила. В реальности же ротор асинхронного электродвигателя никогда не достигнет скорости вращения магнитного поля статора. Ротор будет вращаться с некоторой скоростью которая немного меньше синхронной скорости.
Скольжение асинхронного двигателя может изменяться в диапазоне от 0 до 1, т. е. 0—100%. Если s~0, то это соответствует режиму холостого хода, когда ротор двигателя практически не испытывает противодействующего момента; если s=1 — режиму короткого замыкания, при котором ротор двигателя неподвижен (n2 = 0). Скольжение зависит от механической нагрузки на валу двигателя и с ее ростом увеличивается.
Скольжение, соответствующее номинальной нагрузке двигателя, называется номинальным скольжением. Для асинхронных двигателей малой и средней мощности номинальное скольжение изменяется в пределах от 8% до 2%.
Преобразование энергии
Асинхронный двигатель преобразует электрическую энергию подаваемую на обмотки статора, в механическую (вращение вала ротора). Но входная и выходная мощность не равны друг другу так как во время преобразования происходят потери энергии: на трение, нагрев, вихревые токи и потери на гистерезисе. Это энергия рассеивается как тепло. Поэтому асинхронный электродвигатель имеет вентилятор для охлаждения.
Мир инженера
Приветствую тебя, дорогой и уважаемый читатель сайта “world-engineer.ru”. В одной из статей посвященной шаровым кранам с электроприводом я затронул вопрос о работе асинхронного двигателя и пообещал рассказать о нём в другой статье. Так что в этой статье вы узнаете принцип работы асинхронного двигателя.
Асинхронный двигатель предназначен для работы в продолжительном режиме работы (условное обозначение S1), при котором нагрузка, приложенная к валу и условия охлаждения двигателя практически постоянны в промежутке времени, достаточном для нагрева двигателя до установившейся температуры.
Правильный расчет усредненных величин КПД и коэффициента мощности особенно важен при выборе геометрических размеров, расчета потерь, нагрева и охлаждения, и выборе установленной мощности стандартных двигателей, применяемых для работы в кратковременных и повторно-кратковременных режимах.
Для асинхронных двигателей совокупность кратковременных, повторно-кратковременных и перемежающихся режимов работы подразделяется на 7 групп с условными обозначениями S2…S8.
Кратковременный режим (S2), режим при, котором двигатель не успевает достигнуть номинальной температуры нагрева частей за время работы при постоянной нагрузке, и успевает охладиться до температуры окружающей среды за время пауз.
Повторно-кратковременный режим (S3) работы асинхронного двигателя, характерен для условий работы, при котором продолжительность цикла (10 мин) намного больше времени пуска (т.е. переходной процесс при пуске не влияет на нагрев двигателя и не учитываются). Продолжительность рабочего времени в течении цикла, задается в процентах от времени цикла 5%, 25%, 40% и 60%.
В режимах (S4), в отличие от (S3), продолжительность цикла настолько мала, что процессы, происходящие во время пуска (увеличение потерь из за многократного превышения величин пусковых токов над номинальным), оказывают непосредственное влияние на нагрев машины. Длительность цикла, в этом случае, определяется продолжительностью рабочего времени в процентах от времени цикла и числом включений в час. Поскольку характер переходного процесса во многом определяется динамической нагрузкой на валу, дополнительно задается допускаемый коэффициент инерции (отношение суммы моментов инерции ротора и приведенного к скорости вращения ротора, момента инерции приводного механизма к моменту инерции ротора), на который рассчитан двигатель из условий нормального нагрева.
Режимы работы асинхронного двигателя, при которых в конце каждого цикла предусмотрено электрическое торможение двигателя обозначаются (S5). Продолжительности включения в этом случае, рассчитывается с учетом времени электрического торможения.
Перемежающийся режим (S6) повторяет условия работы режима (S3) с учетом того что, в этом режиме допускается реверс с электрическим торможением или переход на другую скорость вращения. Учет пусковых потерь на нагрев двигателя не производится.
Перемежающийся режим (S7) повторяет условия работы режима (S4) с учетом того что, в этом режиме допускается реверс с электрическим торможением или переход на другую скорость вращения.
Перемежающийся режим (S8) повторяет условия работы режима (S7) с учетом того что, в этом режиме допускается работа двигателя на нескольких разных скоростях вращения с разными величинами нагрузки на валу.
Особенности определения установленной мощности в кратковременном (S2) и повторно-кратковременном режиме эксплуатации (S3, S6)
В кратковременном (S2) и повторно-кратковременных режимах эксплуатации (S3, S6) электродвигатели могут работать с большей установленной мощностью, чем в длительном режиме работы (S1).
Возможное значение величины превышения мощности рекомендуется определять из условия сохранения перегрузочной способности асинхронного двигателя по максимальному моменту в пределах:
МКР / (МN*KP) >= 1,6
При больших числах включения и больших маховых массах определение мощности рекомендуется производить исходя из:
- относительной продолжительности включения;
- частоты включения;
- величины внешнего момента инерции;
- нагрузочной диаграммы привода;
- типа торможения.
Рекомендуемые коэффициенты превышения установленной мощности
| S2 | Коэффициент превышения | S3 | Коэффициент превышения | S6 | Коэффициент превышения |
| 10 мин | 1,4 | 25% | 1,33 | 25% | 1,45 |
| 30 мин | 1,15 | 40% | 1,18 | 40% | 1,35 |
| 60% | 1,08 | 60% | 1,15 |
В настоящее время отменен ГОСТ 183-74 Машины электрические вращающиеся. Общие технические условия. И теперь взамен этого ГОСТ, действует ГОСТ Р 52776-2007 (МЭК 60034-1-2004) Машины электрические вращающиеся. Номинальные данные и характеристики.
Согласно, актуальному ГОСТ режим работы асинхронного двигателя (электрических машин) выбирается из типовых режимов от S1 до S10:
S1 – продолжительный режим. Работа асинхронного двигателя с постоянной нагрузкой и продолжительностью;
S2 – кратковременный режим. Работа асинхронного двигателя с постоянной нагрузкой в течении определенного времени. Вариант обозначения S2 60 мин;
S3 – повторно-кратковременный периодический режим. Работа асинхронного двигателя при последовательных одинаковых рабочих циклах. Вариант обозначения S3 25%;
S4 – повторно-кратковременный периодический режим с пусками;
S5 — повторно-кратковременный периодический режим с электрическим торможением;
S6 — непрерывный периодический режим с кратковременной нагрузкой;
S7 — непрерывный периодический режим с электрическим торможением;
S8 — непрерывный периодический режим с взаимозависимыми изменениями нагрузки и частоты вращения;
S9 — режим с непериодическими изменениями нагрузки и частоты вращения;
S10 — режиме дискретными постоянными нагрузками и частотами вращения.
Более подробную информацию можете изучить в ГОСТ Р 52776-2007 (МЭК 60034-1-2004) Машины электрические вращающиеся. Номинальные данные и характеристики.
Поделиться ссылкой:
Подключение асинхронного двигателя
Трехфазный переменный ток
Электрическая сеть трехфазного переменного тока получила наиболее широкое распространение среди электрических систем передачи энергии. Главным преимуществом трехфазной системы по сравнению с однофазной и двухфазной системами является ее экономичность. В трехфазной цепи энергия передается по трем проводам, а токи текущие в разных проводах сдвинуты относительно друг друга по фазе на 120°, при этом синусоидальные ЭДС на разных фазах имеют одинаковую частоту и амплитуду.
Трехфазный ток (разница фаз 120°)
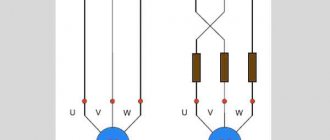
Звезда и треугольник
Трехфазная обмотка статора электродвигателя соединяется по схеме «звезда» или «треугольник» в зависимости от напряжения питания сети. Концы трехфазной обмотки могут быть: соединены внутри электродвигателя (из двигателя выходит три провода), выведены наружу (выходит шесть проводов), выведены в распределительную коробку (в коробку выходит шесть проводов, из коробки три).
Фазное напряжение
— разница потенциалов между началом и концом одной фазы. Другое определение для соединения «звезда»: фазное напряжение это разница потенциалов между линейным проводом и нейтралью (обратите внимание, что у схемы «треугольник» отсутствует нейтраль).
Линейное напряжение
— разность потенциалов между двумя линейными проводами (между фазами).
| Звезда | Треугольник | Обозначение |
| Uл, Uф — линейное и фазовое напряжение, В, | ||
| Iл, Iф — линейный и фазовый ток, А, | ||
| S — полная мощность, Вт | ||
| P — активная мощность, Вт |
Внимание: Несмотря на то, что мощность для соединений в звезду и треугольник вычисляется по одной формуле, подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Пример: Допустим электродвигатель был подключен по схеме «звезда» к трехфазной сети переменного тока Uл=380 В (соответственно Uф=220 В) и потреблял ток Iл=1 А. Полная потребляемая мощность: S = 1,73∙380∙1 = 658 Вт.
Теперь изменим схему соединения на «треугольник», линейное напряжение останется таким же Uл=380 В, а фазовое напряжение увеличится в корень из 3 раз Uф=Uл=380 В. Увеличение фазового напряжения приведет к увеличению фазового тока в корень из 3 раз. Таким образом линейный ток схемы «треугольник» будет в три раза больше линейного тока схемы «звезда». А следовательно и потребляемая мощность будет в 3 раза больше:
S = 1,73∙380∙3 = 1975 Вт.
Таким образом, если двигатель рассчитан на подключение к трехфазной сети переменного тока по схеме «звезда», подключение данного электродвигателя по схеме «треугольник» может привести к его поломке.
Если в нормальном режиме электродвигатель подключен по схеме «треугольник», то для уменьшения пусковых токов на время пуска его можно соединить по схеме звезда. При этом вместе с пусковым током уменьшится также пусковой момент.
Подключение электродвигателя по схеме звезда и треугольник
Обозначение выводов статора трехфазного электродвигателя
Обозначение выводов обмоток статора вновь разрабатываемых
трехфазных машин согласно
ГОСТ 26772-85
[2]
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | U1 | U2 |
| вторая фаза | V1 | V2 |
| третья фаза | W1 | W2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | U | |
| вторая фаза | V | |
| третья фаза | W | |
| точка звезды (нулевая точка) | N | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | U | |
| второй вывод | V | |
| третий вывод | W | |
Обозначение выводов обмоток статора ранее разработанных
и модернизируемых трехфазных машин согласно
ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | C1 | C4 |
| вторая фаза | C2 | C5 |
| третья фаза | C3 | C6 |
| Соединение звездой (число выводов 3 или 4) | ||
| первая фаза | C1 | |
| вторая фаза | C2 | |
| третья фаза | C3 | |
| нулевая точка | 0 | |
| Соединение треугольником (число выводов 3) | ||
| первый вывод | C1 | |
| второй вывод | C2 | |
| третий вывод | C3 | |
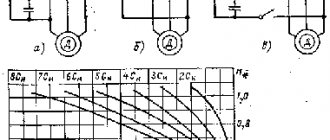
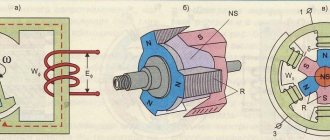
Подключение трехфазного асинхронного двигателя к однофазной сети с помощью фазосдвигающего элемента
Трехфазные асинхронные электродвигатели могут быть подключены к однофазной сети с помощью фазосдвигаюших элементов. При этом электродвигатель будет работать либо в режиме однофазного двигателя с пусковой обмоткой (рисунок а, б, г) либо в режиме конденсаторного двигателя с постоянно включенным рабочим конденсатором (рисунок в, д, е).
Схемы подключения трехфазного асинхронного электродвигателя к однофазной сети
Схемы приведенные на рисунке «а», «б», «д» применяются, когда выведены все шесть концов обмотки. Электродвигатели с соединением обмоток согласно схемам «а», «б», «г» практически равноценны двигателям, которые спроектированы как однофазные электродвигатели с пусковой обмоткой. Номинальная мощность при этом состовляет 40-50% от мощности в трехфазном режиме, а при работе с рабочим конденсатором 75-80%.
Емкость рабочего конденсатора при частоте тока 50 Гц для схем «в», «д», «е» примерно рассчитывается соответственно по формулам:
- ,где Cраб — емкость рабочего конденсатора, мкФ,
- Iном – номинальный (фазный) ток статора трехфазного двигателя, А,
- U1 – напряжение однофазной сети, В.
Если ротор асинхронной машины, включенной в сеть с напряжением U1, вращать посредством первичного двигателя в направлении вращающегося поля статора, но со скоростью n2>n1, то движение ротора относительно поля статора изменится (по сравнению с двигательным режимом этой машины), так как ротор будет обгонять поле статора.
При этом скольжение станет отрицательным, а направление э.д.с. Е1, наведенной в обмотке статора, а следовательно, и направление тока I1 изменятся на противоположное. В результате электромагнитный момент на роторе также изменит направление и из вращающего (в двигательном режиме) превратится в противодействующий (по отношению к вращающему моменту первичного двигателя). В этих условиях асинхронная машина из двигательного перейдет в генераторный режим, преобразуя механическую энергию первичного двигателя в электрическую. При генераторном режиме асинхронной машины скольжение может изменяться в диапазоне − ∞ < s < 0, при этом частота э.д.с. асинхронного генератора остается неизменной, так как она определяется скоростью вращения поля статора, т.е. остается такой же, что и частота тока в сети, на которую включен асинхронный генератор.
Ввиду того, что в генераторном режиме асинхронной машины условия создания вращающегося поля статора такие же, что и в двигательном режиме (и в том и в другом режимах обмотка статора включена в сеть с напряжением U1), и потребляет из сети намагничивающий ток I0, то асинхронная машина в генераторном режиме обладает особыми свойствами: она потребляет реактивную энергию из сети, необходимую для создания вращающегося поля статора, но отдает в сеть активную энергию, получаемую в результате преобразования механической энергии первичного двигателя. Следует обратить внимание, что работа асинхронных генераторов возможна лишь при их совместной работе с синхронными генераторами, которые в этом случае необходимы как источники реактивной энергии.
В отличие от синхронных асинхронные генераторы не подвержены опасностям выпадения из синхронизма. Однако асинхронные генераторы не получили широкого распространения, что объясняется рядом их недостатков по сравнению с синхронными генераторами.
Одним из существенных недостатков асинхронных генераторов является значительная реактивная мощность, потребляемая ими из сети. Величина этой мощности пропорциональна намагничивающему току I0 и может достигать 25-45% от номинальной мощности машины.
Из этого следует, что для работы 3-4 асинхронных генераторов необходимо использовать один синхронный генератор такой же мощности, что и мощность одного асинхронного генератора.
Если же асинхронные генераторы работают параллельно на общую сеть с несколькими синхронными генераторами, то большая величина реактивной мощности возбуждения асинхронных генераторов значительно понизит коэффициент мощности всей электрической сети.
Асинхронный генератор может работать и в автономных условиях, т.е. без включения в общую сеть. Но в этом случае для получения реактивной мощности, необходимой для намагничивания генератора, используется батарея конденсаторов, включенных параллельно нагрузке на выводы генератора.
Непременным условием такой работы асинхронных генераторов является наличие остаточного намагничивания стали ротора, что необходимо для процесса самовозбуждения генератора. Небольшая э.д.с. Еост, наведенная в обмотке статора, создает в цепи конденсаторов, а следовательно, и в обмотке статора небольшой реактивный ток, усиливающий остаточный поток Фост. В дальнейшем процесс самовозбуждения развивается, как и в генераторе постоянного тока параллельного возбуждения. Изменением емкости конденсаторов можно изменять величину намагничивающего тока, а следовательно, и величину напряжения генераторов. Из-за чрезмерной громоздкости и высокой стоимости конденсаторных батарей асинхронные генераторы с самовозбуждением не получили распространения. Асинхронные генераторы применяются лишь на электростанциях вспомогательного значения малой мощности, например в ветросиловых установках.
Тормозной режим асинхронной машины применяется при необходимости быстрой остановки ротора двигателя. Этот режим создается противовключением двигателя. Для этого необходимо изменить направление вращения магнитного поля статора. С этой целью достаточно переключить любую пару проводов, соединяющих обмотку статора с сетью, т.е. изменить порядок следования фаз на зажимах статора. В первый момент после переключения соединительных проводов силы инерции вращающихся частей двигателя и исполнительного механизма продолжают вращать ротор в прежнем направлении, а вращающееся поле статора начинает вращаться в противоположном направлении. В этих условиях скольжение асинхронной машины становится больше единицы s = (−n1−n 2)/(−n1) > 1, а электрические потери в цепи ротора pэ2 = sРэм больше электромагнитной мощности.
Таким образом, электромагнитная мощность машины в тормозном режиме составляет лишь часть электрических потерь в роторе. Другая часть этих потерь покрывается за счет механической мощности вращающихся по инерции частей двигателя и исполнительного механизма.
Электромагнитный момент при этом имеет то же направление, что и направление поля статора, т.е. направление против вращения ротора и является тормозящим по отношению к моменту, вращающему ротор. К недостаткам этого способа торможения следует отнести: значительные потери энергии, вызванные нагревом роторной обмотки, а также большие броски тока в момент переключения проводов обмотки статора. В двигателях с контактными кольцами для ограничения броска тока при торможении противовключением в цепь ротора включают сопротивление. Кроме того, при торможении двигателя указанным способом необходимо отключить его от сети в момент остановки, так как в противном случае произойдет реверсирование, т.е. ротор двигателя начнет вращаться в противоположном направлении.
Таким образом, возможны три режима работы асинхронной машины: двигательный, генераторный и тормозной. Каждому из указанных режимов соответствует определенный диапазон изменения скольжения: в двигательном режиме скольжение может изменяться от нуля (n2 = n1) до единицы (n2 = 0), в генераторном – от нуля до минус бесконечности, а в тормозном – от единицы до плюс бесконечности.
Источник: Кацман М. М. Электрические машины и трансформаторы. — М.: 1971, с. 315-318.
Управление асинхронным двигателем
- Способы подключения асинхронного электродвигателя к сети питания:
- прямое подключение к сети питания
- подключение от устройства плавного пуска
- подключение от преобразователя частоты
Варианты подключения асинхронного электродвигателя с помощью магнитного пускателя (слева), устройства плавного пуска (посеридине) и частотного преобразователя (справа). Схемы представлены в упрощенном виде. FU1-FU9 — плавкие предохранители, KK1 — тепловое реле, KM1 — магнитный пускатель, L1-L3 — контакты для подключения к сети трехфазного переменного тока, M1-M3 — асинхронные электродвигатели, QF1-QF3 — автоматические выключатели, UZ1 — устройство плавного пуска, UZ2 — преобразователь частоты
Прямое подключение к сети питания
Использование магнитных пускателей позволяет управлять асинхронными электродвигателями путем непосредственного подключения двигателя к сети переменного тока.
С помощью магнитных пускателей можно реализовать схему:
- нереверсивного пуска: пуск и остановка;
- реверсивного пуска: пуск, остановка и реверс.
Использование теплового реле позволяет осуществить защиту электродвигателя от величин тока намного превышающих номинальное значение.
Нереверсивная схема
Нереверсивная схема подключения трехфазного асинхронного электродвигателя к трехфазной сети переменного электрического тока через магнитный пускатель L1, L2, L3 — контакты для подключения к сети трехфазного переменного тока, QF1 — автоматический выключатель, SB1 — кнопка остановки, SB2 — кнопка пуска, KM1 — магнитный пускатель, KK1 — тепловое реле, HL1 — сигнальная лампа, M — трехфазный асинхронный двигатель
Реверсивная схема
Реверсивная схема подключения трехфазного асинхронного электродвигателя к трехфазной сети переменного электрического тока через магнитные пускатели L1, L2, L3 — контакты для подключения к сети трехфазного переменного тока, QF1 — автоматический выключатель, KM1, KM2 — магнитные пускатели, KK1 — тепловое реле, M — трехфазный асинхронный двигатель, SB1 — кнопка остановки, SB2 — кнопка пуска «вперед», SB3 — кнопка пуска «назад» (реверс), HL1, HL2 — сигнальные лампы
Недостатком прямой коммутации обмоток асинхронного электродвигателя с сетью является наличие больших пусковых токов, во время запуска электродвигателя.
Плавный пуск асинхронного электродвигателя
В задачах, где не требуется регулировка скорости электродвигателя во время работы для уменьшения пусковых токов используется устройство плавного пуска.
Устройство плавного пуска защищает асинхронный электродвигатель от повреждений вызванных резким увеличением потребляемой энергии во время пуска путем ограничения пусковых токов. Устройство плавного пуска позволяет обеспечить плавный разгон и торможение асинхронного электродвигателя.
Устройство плавного пуска дешевле и компактнее частотного преобразователе. Применяется там, где регулировка скорости вращения и момента требуется только при запуске.
Частотное управление асинхронным электродвигателем
Для регулирования скорости вращения и момента асинхронного двигателя используют частотный преобразователь. Принцип действия частотного преобразователя основан на изменении частоты и напряжения переменного тока.
- Использование частотного преобразователя позволяет:
- уменьшить энергопротребление электродвигателя;
- управлять скоростью вращения электродвигателя (плавный запуск и остановка, регулировка скорости во время работы);
- избежать перегрузок электродвигателя и тем самым увеличить его срок службы.
Функциональная схема частотно-регулируемого привода
- В зависимости от функционала частотные преобразователи реализуют следующие методы регулирования асинхронным электродвигателем:
- скалярное управление;
- векторное управление.
Скалярное управление
является простым и дешевым в реализации, но имеет следующие недостатки — медленный отклик на изменение нагрузки и небольшой диапазон регулирования. Поэтому скалярное управление обычно используется в задачах, где нагрузка либо постоянна, либо изменяется по известному закону (например, управление вентиляторами).
Скалярное управление асинхронным двигателем с датчиком скорости
Векторное управление
используется в задачах, где требуется независимо управлять скоростью и моментом электродвигателя (например, лифт), что, в частности, позволяет поддерживать постоянную скорость вращения при изменяющемся моменте нагрузки. При этом векторное управление является самым эффективным управлением с точки зрения КПД и увеличения времени работы электродвигателя.
Среди векторных методов управления асинхронными электродвигателями наиболее широкое применение получили: полеориентированное управление и прямое управление моментом.
Полеориентированное управления асинхронным электродвигателем по датчику положения ротора
Полеориентированное управление
позволяет плавно и точно управлять параметрами движения (скоростью и моментом), но при этом для его реализации требуется информация о направлениии вектора потокосцепления ротора двигателя.
- По способу получения информации о положении потокосцепления ротора электродвигателя выделяют:
- полеориентированное управление по датчику;
- полеориентированное управление без датчика: положение потокосцепления ротора вычисляется математически на основе той информации, которая имеется в частотном преобразователе (напряжение питания, напряжения и токи статора, сопротивление и индуктивность обмоток статора и ротора, количество пар полюсов двигателя).
Полеориентированное управления асинхронным электродвигателем без датчика положения ротора
Прямое управление моментом
имеет простую схему и высокую динамику работы, но при этом высокие пульсации момента и тока.
Генераторный режим работы асинхронной машины.
Если ротор разогнать с помощью внешнего момента (например, каким-либо двигателем) до частоты, большей частоты вращения магнитного поля, то изменится направление ЭДС в обмотке ротора и активной составляющей тока ротора, то есть асинхронная машина перейдёт в генераторный режим. При этом изменит направление и электромагнитный момент, который станет тормозным. В генераторном режиме работы скольжение. Генераторный режим асинхронного двигателя используется довольно часто в механизмах с активным моментом: в таком режиме могут работать двигатели эскалаторов метро (при движении вниз), опускании груза в подъёмных кранах, в генераторном режиме также работают двигатели лифтов, в зависимости от соотношения веса в кабине и в противовесе; при этом сочетаются необходимый по технологии режим торможения механизма и рекуперация энергии в сеть с экономией электроэнергии.
Условия самовозбуждения асинхронного генератора.
Для работы асинхронной машины в генераторном режиме требуется источник реактивной мощности, создающий магнитное поле. При отсутствии первоначального магнитного поля в обмотке статора поток создают с помощью постоянных магнитов, либо при активной нагрузке за счёт остаточной индукции машины и конденсаторов, параллельно подключенных к фазам обмотки статора. Асинхронный генератор потребляет реактивный ток и требует наличия в сети генераторов реактивной мощности в виде синхронных машин, синхронных компенсаторов, батарей статических конденсаторов (БСК). Из-за этого, несмотря на простоту обслуживания, асинхронный генератор применяют сравнительно редко, в основном в качестве ветрогенераторов малой мощности, вспомогательных источников небольшой мощности и тормозных устройств.
Тормозные режимы работы асинхронной машины.
Если изменить направление вращения ротора или магнитного поля так, чтобы они вращались в противоположных направлениях, то ЭДС и активная составляющая тока в обмотке ротора будут направлены так же, как в двигательном режиме, и машина будет потреблять из сети активную мощность. Однако электромагнитный момент будет направлен встречно моменту нагрузки, являясь тормозящим. Этот режим применяют кратковременно, так как при нём в роторе выделяется много тепла, которое двигатель не способен рассеять, что может вывести его из строя.
Для более мягкого торможения может применяться генераторный режим, но он эффективен только при оборотах, близких к номинальным.
67. Трансформаторный режим работы асинхронной машины.Фазорегуляторы. В трансформаторном режиме асинхронная машина работает при s=1 . В этом энергетическом режиме машина является электромагнитным преобразователем и не преобразует электрическую энергию в механическую или обратно. Для работы в трансформаторном режиме используются машины с фазным ротором. При этом между обмотками статора и ротора возможна трансформаторная или автотрансформаторная связь. Фазорегулятор. Конструктивно фазорегулятор – это асинхронная машина с заторможенным фазным ротором, обмотки статора и ротора которой имеют между собой трансформаторную связь и могут поворачиваться относительно друг друга на электрический угол 360 . При повороте ротора относительно статора амплитуда ЭДС на роторе 2 Е не изменится, т. к. ЭДС в фазных обмотках ротора наводится вращающимся полем, а фаза (временной сдвиг между первичным и вторичным напряжением) изменится. Принимая активные и индуктивные сопротивления фазных обмоток ротора равными нулю, можно считать U2= E2 . При повороте ротора относительно статора на угол β изменяется и временной угол между напряжениями статора и ротора на величину рβ.
Ротор относительно статора поворачивается вручную или с помощью привода. Как было сказано выше, на ротор действует пусковой момент, что следует учитывать при расчете самостопорящегося поворотного редуктора ротора фазорегулятора. Промышленность выпускает трехфазные фазорегуляторы серии ФР, ФРО напряжением 220/380 В и мощностью до 18 кВ А.
Трехфазный асинхронный двигатель с фазным ротором
Асинхронный двигатель с фазным ротором
— асинхронный двигатель, у которого обмотка ротора присоединена к контактным кольцам [1].
До широкого распространения частотных преобразователей асинхронные двигатели средней и большой мощности делали с фазным ротором. Трехфазные асинхронные двигатели с фазным ротором (АДФР) обычно применяли в устройствах с тяжелыми условиями пуска, например в качестве крановых двигателей переменного тока, или же для привода устройств, требующих плавного регулирования частоты вращения.
Конструкция АДФР
Фазный ротор
Конструктивно фазный ротор представляет из себя трехфазную обмотку (аналогичную обмотки статора) уложенную в пазы сердечника фазного ротора. Концы фаз такой обмотки ротора обычно соединяются в «звезду», а начала подключают к контактным кольцам, изолированным друг от друга и от вала. Через щетки к контактным кольцам обычно присоединяется трехфазный пусковой или регулировочный реостат. Асинхронные двигатели с фазным ротором имеют более сложную конструкцию, чем у двигателей с короткозамкнутым ротором, однако обладают лучшими пусковыми и регулировочными свойствами.
Фазный ротор
Генераторный режим асинхронных двигателей
Основной функцией автономных трехфазных асинхронных генераторов, является преобразование механической энергии, поступающей от первоначального двигателя, в электричество. Благодаря своим преимуществам, работа асинхронного двигателя в генераторном режиме имеет большое значение при выработке электроэнергии в определенных условиях.
В сравнении с другими типами генераторов, здесь отсутствует коллекторно-щеточный механизм, из-за чего, устройство может работать более надежно и долговечно. Для асинхронного двигателя, отключенного от сети, используются различные первичные двигатели, обеспечивающие вращение. В данном случае, в действие вступает принцип обратимости, наблюдаемый в электрических машинах. Когда частота вращения становится синхронной, то остаточное магнитное поле, воздействуя на зажимы обмотки статора, образует определенную электродвижущую силу.