СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ
Изобретение относится к области эксплуатации асинхронных электродвигателей и может быть использовано для определения величины скольжения электродвигателя. Способ включает оценку величины скольжения ротора по графику зависимости скольжения от величины потребляемого тока, цифровую регистрацию мгновенной величины амплитуды потребляемого тока во времени на одной из фаз кабеля питания асинхронного электродвигателя, с помощью двух полосовых фильтров выделяют основную гармонику и высокочастотную составляющую сигнала потребляемого тока. Вычисляют по основной гармонике частоту сети, затем определяют границы диапазонов для поиска частот. После чего, исключив из диапазонов частоты, вызванные насыщением магнитопроводов ротора и датчика тока, находят частоты зубцовых гармонических первого порядка, по которым получают два значения скольжения ротора, определяют скольжение ротора асинхронного электродвигателя по среднему арифметическому данных значений и делают заключение о достоверности результата путем сравнения двух величин скольжения, вычисленных по частотам зубцовых гармонических ротора первого порядка. Технический результат заключается в повышении точности и достоверности получаемого результата, исключении необходимости проведения дополнительных измерений для получения достоверного значения скольжения. 2 ил.
Способ определения скольжения ротора асинхронного электродвигателя, включающий оценку величины скольжения ротора, цифровую регистрацию мгновенной величины амплитуды потребляемого тока во времени на одной из фаз кабеля питания асинхронного электродвигателя, отличающийся тем, что с помощью двух полосовых фильтров выделяют основную гармонику и высокочастотную составляющую сигнала потребляемого тока, в которой имеются зубцовые гармонические ротора первого порядка, вычисляют по основной гармонике частоту сети, затем определяют границы диапазонов для поиска частот, обусловленных зубцовыми гармоническими ротора первого порядка, после чего, исключив из диапазонов частоты, вызванные насыщением магнитопроводов ротора и датчика тока, находят частоты зубцовых гармонических первого порядка, по которым получают два значения скольжения ротора, определяют скольжение ротора асинхронного электродвигателя по среднему арифметическому данных значений и делают заключение о достоверности результата путем сравнения двух величин скольжения, вычисленных по частотам зубцовых гармонических ротора первого порядка.
Изобретение относится к области эксплуатации асинхронных электродвигателей и может быть использовано для определения величины скольжения электродвигателя.
Широко известны способы определения скольжения асинхронных электродвигателей с короткозамкнутым ротором (ГОСТ 7217-87 (СТ СЭВ 168-85). Машины электрические вращающиеся. Двигатели асинхронные. Методы испытаний. — Введ. 1988-01-01. — М.: Изд-во стандартов, 1987. — 53 с.):
— стробоскопический способ: для этого на валу двигателя наносят метки, число которых равно числу пар полюсов. Освещая вал стробоскопической лампой, питаемой от той же сети, что и испытуемый двигатель, измеряют время прохождения определенного количества меток мимо неподвижного указателя, считая прохождение метки в момент пуска секундомера за нулевое,
— способ определения скольжения при помощи индуктивной катушки: катушку размещают у торца асинхронного электродвигателя, предварительно определив положение, при котором стрелка гальванометра совершает наиболее заметные качания, и измеряют время определенного количества колебаний.
Данные способы малопригодны для их использования в рабочем режиме, так как требуют установки вблизи высоковольтной обмотки статора или на валу асинхронного электродвигателя дополнительных элементов. Поэтому они нашли применение только при проведении испытаний на выведенном в ремонт двигателе.
В качестве прототипа принят «Способ определения скольжения ротора асинхронного электродвигателя …» (патент Российской Федерации на изобретение №2209442, МПК G01R 31/34, 2003 г.), позволяющий определить скольжение в рабочем режиме. Он основан на выделении с помощью преобразования Гильберта из фазного тока статора низкочастотной огибающей, имеющей двойную частоту скольжения 2(fc-fвp), где fc — частота сети, fвp — частота вращения ротора, и далее с помощью преобразования Фурье, определив частоту колебаний огибающей и приняв частоту сети равной 50 Гц, рассчитывают значение скольжения.
Недостатками этого способа являются:
— низкая достоверность получаемой величины скольжения, так как в качестве источника, несущего информацию о величине скольжения, принята низкочастотная огибающая потребляемого тока, которая может отсутствовать (при магнитной и электрической симметрии асинхронного электродвигателя (сопротивления стержней обмотки ротора равны, равномерный воздушный зазор между статором и ротором)) или быть обусловлена низкочастотными колебаниями нагрузки;
— необходимость многократного повторения измерений для получения более достоверного значения скольжения (второй недостаток вытекает из первого);
— низкая точность определяемой величины скольжения при отклонении частоты сети от 50 Гц.
Техническим результатом предлагаемого изобретения является повышение точности и достоверности получаемого результата, исключение необходимости проведения дополнительных измерений для получения достоверного значения скольжения.
Технический результат достигается тем, что в способе определения скольжения ротора асинхронного электродвигателя, включающем оценку величины скольжения ротора по графику зависимости скольжения от величины потребляемого тока при постоянном напряжении в сети, цифровую регистрацию мгновенной величины амплитуды потребляемого тока во времени на одной из фаз кабеля питания асинхронного электродвигателя, с помощью двух полосовых фильтров выделяют основную гармонику и высокочастотную составляющую сигнала потребляемого тока, в которой имеются зубцовые гармонические ротора первого порядка, вычисляют по основной гармонике частоту сети, затем определяют границы диапазонов для поиска частот, обусловленных зубцовыми гармоническими ротора первого порядка, после чего, исключив из диапазонов частоты, вызванные насыщением магнитопроводов ротора и датчика тока, находят частоты зубцовых гармонических первого порядка, по которым получают два значения скольжения ротора, определяют скольжение ротора асинхронного электродвигателя по среднему арифметическому данных значений и делают заключение о достоверности результата путем сравнения двух величин скольжения, вычисленных по частотам зубцовых гармонических ротора первого порядка.
Сущность способа заключается в следующем. Известно, что в трехфазном асинхронном электродвигателе обмотки статора, за счет сдвига фаз между ними, возбуждают магнитное поле, вращающееся с частотой электрической сети fс (или кратной ей). Это поле индуктирует в короткозамкнутых стержнях ротора ток, который обуславливает вращение ротора. Частота вращения ротора асинхронного электродвигателя fвp в двигательном режиме несколько меньше частоты вращения магнитного поля статора. Разность частот fc-fвp является частотой скольжения ротора относительно поля статора, а отношение (fc-fвp)/fc — величиной скольжения s, которую выражают в долях единицы или в процентах. Магнитное поле в воздушном зазоре асинхронного двигателя изменяется не строго по синусоидальному закону, поэтому при разложении в ряд Фурье токового сигнала в нем обнаруживаются гармоники, имеющие частоту, отличную от частоты питающей сети. Наличие этих гармоник объясняется, в основном, конструктивными особенностями двигателя. Согласно (Геллер Б., Гамата В. Высшие гармоники в асинхронных машинах / Пер. с англ. Под ред. З.Г.Каганова. — М.: «Энергия», 1981. — 352 с., ил.) источниками временных гармоник магнитного поля в воздушном зазоре, которые несут информацию о скольжении, являются зубчатость ротора и дискретное расположение стержней по обмотке ротора. Гармоники от этих источников (в дальнейшем они называются зубцовые гармонические ротора (ЗГР)) существуют всегда в магнитном поле воздушного зазора, поэтому они пригодны для определения скольжения. В предлагаемом способе определение скольжения ротора асинхронного электродвигателя осуществляют путем регистрации мгновенной величины потребляемого электродвигателем тока J(t) во времени посредством датчика тока, установленного на одну из фаз кабеля питания электродвигателя, и последующей обработки токового сигнала. Зарегистрированный токовый сигнал J(t), кроме основной гармоники, также содержит гармоники, обусловленные ЗГР. Частоты их зависят от параметров двигателя и могут быть определены по следующему выражению:
Способы измерения
Существует несколько способов измерения скольжения асинхронного двигателя. Если частота вращения значительно отличается от синхронной, то ее можно измерить с помощью тахометра или тахогенератора, подключенного на валу ЭД.
Вариант измерения стробоскопическим методом с помощью неоновой лампы подходит при величине скольжения не более 5%. Для этого на валу двигателя либо наносят мелом специальную черту, либо устанавливают специальный стробоскопический диск. Освещают их неоновой лампой, и отсчитывают вращение за определенное время, потом, по специальным формулам производят вычисления. Также возможно использование полноценного стробоскопа, подобно тому что показано ниже.
Механические характеристики асинхронных двигателей
Асинхронные двигатели являются основными двигателями, которые наиболее широко используются как в промышленности, так и в агропромышленном производстве. Они обладают существенными преимуществами перед другими типами двигателей: просты в эксплуатации, надежны и имеют низкую стоимость.
В трехфазном асинхронном двигателе при подключении обмотки статора к сети трехфазного переменного напряжения создается вращающееся магнитное поле, которое, пересекая проводники обмотки ротора, наводит в них ЭДС, под воздействием которой в роторе появляются ток и магнитный поток. Взаимодействие магнитных потоков статора и ротора создает вращающий момент двигателя. Появление в обмотке ротора ЭДС, следовательно, и вращающего момента возможно только при наличии разности между скоростями вращения магнитного поля статора и ротора. Это различие в скоростях называют скольжением.
Скольжение асинхронного двигателя — это мера того, насколько ротор отстает в своем вращении от вращения магнитного поля статора. Оно обозначается буквой S
и определяется по формуле
,
(2.17)
где w — угловая скорость вращения магнитного поля статора (синхронная угловая скорость двигателя); w — угловая скорость ротора; ν – частота вращения двигателя в относительных единицах.
Скорость вращения магнитного поля статора зависит от частоты тока питающей сети f
и числа пар полюсов
р
двигателя:
.
(2.18)
Уравнение механической характеристики асинхронного двигателя можно вывести на основе упрощенной схемы замещения, приведенной на рис.2.11. В схеме замещения приняты следующие обозначения: Uф
— первичное фазное напряжение;
I1
— фазный ток в обмотках статора;
I2́
— приведенный ток в обмотках ротора;
X1
– реактивное сопротивление обмотки статора;
R1
,
R 1 2
– активные сопротивления в обмотках соответственно статора и приведенного ротора;
X2
΄- приведенное реактивное сопротивление в обмотках ротора;
R
,
X
— активное и реактивное сопротивления контура намагничивания;
S
– скольжение.
Что это такое
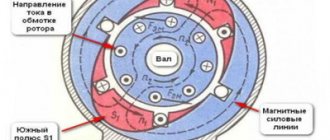
Принцип действия 3-х фазного электродвигателя (асинхронного) достаточно простой. К статорной обмотке подаётся питание. В результате образуется магнитный поток, смещённый на сто двадцать градусов в фазах. Общий поток, при этом, будет вращаться.
Обмотка представляет собой замкнутый контур, в котором возникает электродвижущая сила. Магнитный поток вращает ротор по направлению статорного потока. Крутящийся электромагнит стремится выровнять вращающие скорости статорного и роторного полей.
Значение, показывающее разницу быстроты вращения статорного и роторного полей и есть скольжение. Поскольку в асинхронном электродвигателе ротор всегда крутится медленней статора, значение, обычно, не превышает единицы. Измеряется в процентах либо единицах.
Вычисляется по следующей формуле:
Здесь n1 – скорость статора, n2 – скорость ротора.
Скольжение – один из основных параметров, отображающий корректность функционирования асинхронного электродвигателя.
Характеристики асинхронного электродвигателя, крутящий момент скольжения.
Крутящий момент скольжения, характеристики трёхфазного асинхронного электродвигателя
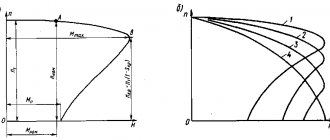
Кривая крутящего момента скольжения для асинхронного двигателя даёт информацию об изменении крутящего момента со скольжением. Скольжение определяется как отношение разности синхронной скорости и фактической скорости ротора к синхронной скорости устройства.
Изменение скольжения может быть достигнуто вместе с изменением скорости, когда скорость меняется, будет меняться и скольжение, и крутящий момент, соответствующий данной скорости, также будет изменяться. Кривая может быть описана в трёх режимах работы:
Моторный режим
Идёт подача в область статора, и двигатель всегда вращается медленнее синхронной скорости. Крутящий момент асинхронного двигателя меняется от нуля до крутящего момента полной нагрузки, так же как и скольжение.
Скольжение претерпевает изменения от нуля до единицы. При отсутствии нагрузки скольжение составляет ноль, а при состоянии покоя оно равно единице. Кривая показывает, что крутящий момент прямо пропорционален скольжению. Это означает, что чем больше скольжение, тем больше производимый крутящий момент, и наоборот. Линейные взаимоотношения сильно упрощают расчёт параметра двигателя.
Большая Энциклопедия Нефти и Газа
Скольжение — асинхронный двигатель
Каким выражением определяется скольжение асинхронного двигателя . [16]
В некоторых пределах скольжение асинхронного Двигателя примерно пропорционально моменту нагрузки на его валу. Из векторной диаграммы видно, что тогда возрастает и ток / i статора, а сдвиг по фазе cpi этого тока относительно напряже-ния й сети уменьшается. [17]
В некоторых пределах скольжение асинхронного двигателя примерно пропорционально моменту нагрузки на его валу. [19]
В нормальных режимах скольжение асинхронного двигателя имеет малое положительное значение, поэтому эквивалентное, активное сопротивление Rpo. Js в цепи ротора значительно больше действительного активного сопротивления ротора Rpor — Дополнительное активное сопротивление рот ( 1 — s) / s показано на рис. 3 — 2 отдельно. [20]
Таким образом, скольжение асинхронного двигателя численно равно отношению потерь в обмотке ротора рм2 к развиваемой двигателем электромагнитной мощности Рэм. [21]
Момент вращения и скольжения асинхронных двигателей зависит от напряжения на их зажимах. При снижении напряжения хотя бы на 10 % по сравнению с номинальным значением может несколько снизиться производительность работы приводимых двигателями производственных механизмов. При значительном снижении напряжения двигатели могут остановиться. Повышение напряжения на зажимах двигателя приводит к увеличению потребляемой их реактивной мощности. В случае снижения напряжения на зажимах двигателя при той же потребляемой мощности увеличивается его ток. При этом происходит более интенсивный нагрев изоляции двигателя и соответственно снижается срок ее службы. Расчеты показывают, что при длительной работе полностью загруженного двигателя с отклонениями, напряжения на зажимах. V-10 % срок его службы сокращается примерно вдвое. [22]
В некоторых пределах скольжение асинхронного двигателя примерно пропорционально моменту нагрузки на его валу. [24]
В некоторых пределах скольжение асинхронного двигателя примерно пропорционально моменту нагрузки на его валу. Из векторной диаграммы видно, что тогда возрастает и ток 1г статора, а сдвиг по фазе рг этого тока относительно напряжения U1 сети уменьшается. [25]
Такое нарастание объясняется возрастанием скольжения асинхронных двигателей в связи со снижением напряжения сети. [27]
По принципу использования энергии скольжения асинхронного двигателя каскады делятся на две группы: электромеханические и электрические. К первым относятся каскады, у которых энергия скольжения с помощью электромашинного или статического преобразователя подводится к дополнительной электрической машине, соединенной валом с асинхронным двигателем. У каскадов этой группы имеется электрическое соединение колец ротора асинхронного двигателя посредством преобразователя с якорем дополнительной машины, — а также механическое соединение последней с главным приводным двигателем. В электрических каскадах энергия скольжения асинхронного двигателя посредством электромашинного или статического преобразователя передается в сеть переменного тока. У каскадов этой группы имеется только электрическое соединение колец ротора асинхронного двигателя и преобразователя. Электромеханический каскад характерен тем, что момент на валу производственного механизма создается совместно асинхронным двигателем и дополнительной машиной постоянного тока, в то время как у электрического каскада этот момент создается только главным асинхронным двигателем. [28]
Стробоскопический метод удобен для определения скольжения асинхронных двигателей по отношению к синхронной скорости. При определении скольжения вместо применения специального диска достаточно на поверхность соединительной муфты параллельно оси равномерно нанести мелом ряд полос по числу гюлюсов двигателя. [30]