Что такое асинхронный двигатель?
Электродвигатели переменного тока нашли довольно широкое применение в различных сферах нашей жизнедеятельности, в подъемно транспортном, обрабатывающем, измерительном оборудовании. Они используются для превращения электрической энергии, которая поступает от сети, в механическую энергию вращающегося вала. Чаще всего используются именно асинхронные преобразователи переменного тока. В них частота вращения ротора и статора отличаются. Между этими активными элементами обеспечивается конструктивный воздушный зазор.
И статор, и ротор имеют жесткий сердечник из электротехнической стали (наборного типа, из пластин), выступающий в роли магнитопровода, а также обмотку, которая укладывается в конструктивные пазы сердечника. Именно способ организации или укладки обмотки ротора является ключевым критерием классификации этих машин.
Двигатели с короткозамкнутым ротором (АДКР)
Здесь используется обмотка в виде алюминиевых, медных или латунных стержней, которые вставляются в пазы сердечника и с обеих сторон замыкаются дисками (кольцами). Тип соединения этих элементов зависит от мощности двигателя: для малых значений используют метод совместной отливки дисков и стержней, а для больших – раздельное изготовление с последующей сваркой между собой. Обмотка статора подключается с использованием схем «треугольника» или «звезды».
Двигатели с фазным ротором
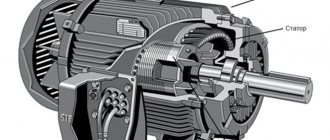
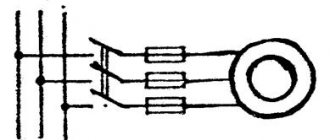
К сети подключается трехфазная обмотка ротора, посредством контактных колец на основном валу и щеток. За основу принимается схема «звезда». На рисунке внизу представлена типичная конструкция такого двигателя.
Лекция на тему «Потери и КПД асинхронного двигателя»
Потери и кпд асинхронного двигателя
Преобразование электрической энергии в механическую в асинхронном двигателе, как и в других электрических машинах, связано с потерями энергии, поэтому полезная мощность на выходе двигателя Р2всегда меньше мощности на входе (потребляемой мощности) Р1на величину потерь∑Р :
Р2
= Р1— ∑
Р (13.1)
Потери ∑Р преобразуются в теплоту, что в конечном итоге ведет к нагреву машины. Потери в электрических машинах разделяются на основные и добавочные. Основные потери включают в себя магнитные, электрические и механические.
Магнитные потери Рмв асинхронном двигателе вызваны потерями на гистерезис и потерями на вихревые токи, происходящими в сердечнике при его перемагничивании. Величина магнитных потерь пропорциональна частоте перемагничивания Рм=f
β,
где β = 1,3 ÷ 1,5. Частота перемагничивания сердечника статора равна частоте тока в сети (f
=
f1
), а частота перемагничивания сердечника ротора
f
=
f
2=
f
1s.При частоте тока в сети
f
1 = 50 Гц при номинальном скольжении sном= 1 ÷ 8 % частота перемагничивания ротора
f
=
f
2= 2 ÷ 4 Гц, поэтому магнитные потери в сердечнике ротора настолько малы, что их в практических расчетах не учитывают.
Электрические потери в асинхронном двигателе вызваны нагревом обмоток статора и ротора проходящими по ним токами. Величина этих потерь пропорциональна квадрату тока в обмотке (Вт):
электрические потери в обмотке статора
Рэ1
= m1I21r1
; (13.2)
электрические потери в обмотке ротора
Рэ2
= m2I22r2= m1I′ 21r′ 1
(13.3)
Здесь r1и r2— активные сопротивления обмоток фаз статора и ротора пересчитанные на рабочую температуру Θраб(см. § 8.4):
r1
= r1.20[1 + α (Θраб— 20)]; r2= r2.20[1 + α (Θра6— 20)]
, (13.4)
где r1.20и r2.20 — активные сопротивления обмоток при температуре Θ1= 20 °С; α — температурный коэффициент, для меди и алюминия α = 0,004.
Электрические потери в роторе прямо пропорциональны скольжению:
Рэ2
= s Рэм
(13.5)
где Рэм— электромагнитная мощность асинхронного двигателя, Вт:
Рэм
= Р1– (Рм+ Рэ1)
(13-6)
Из (13.5) следует, что работа асинхронного двигателя экономичнее при малых скольжениях, так как с ростом скольжения растут электрические потери в роторе.
В асинхронных двигателях с фазным ротором помимо перечисленных электрических потерь имеют место еще и электрическиe потери в щеточном контакте Рэ.щ= 3 I2ΔUщ /2, где Uщ=2,2 В — переходное падение напряжения на пару щеток.
Механические потери Рмех— это потери на трение в подшипниках и на вентиляцию. Величина этих потерь пропорциональна квадрату частоты вращения ротора (Рмех= n22). В асинхронных двигателях с фазным ротором механические потери происходят еще и за счет трения между щетками и контактными кольцами ротора.
Добавочные потери включают в себя все виды трудноучитываемых потерь, вызванных действием высших гармоник МДС, пульсацией магнитной индукции в зубцах и другими причинами. В соответствии с ГОСТом добавочные потери асинхронных двигателей принимают равными 0,5% от подводимой к двигателю мощности Р1:
Рдо6
= 0,005 Р1
. (13.7)
При расчете добавочных потерь для неноминального режима следует пользоваться выражением
Р′доб
= Рдобβ2
(13-8)
где β = I1/ I1ном—коэффициент нагрузки.
Сумма всех потерь асинхронного двигателя (Вт)
∑P = Рэм
+ Рэ1+ Рэ2+ Рмех+ Рдоб
. (13.9)
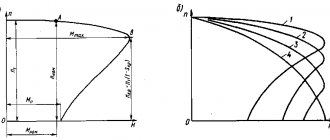
На рис. 13.1 представлена энергетическая диаграмма асинхронного двигателя, из которой видно, что часть подводимой к двигателю мощности Р1 = m1U1I1cos φ1затрачивается в статоре на магнитные Рыи электрические Рэ1потери. Оставшаяся после этого электромагнитная мощность Рэм[см. (13.6)] передается на ротор, где частично расходуется на электрические потери Рэ2и преобразуется в полную механическую мощность Р′2. Часть мощности идет на покрытие механических Рмехи добавочных потерь Рдоб, а оставшаяся часть этой мощностиР2 составляет полезную мощность двигателя.
У асинхронного двигателя КПД
η = Р2/ Р1
=1 — ∑P
. (13.10)
Электрические потери в обмотках РЭ1и РЭ2являются переменными потерями, так как их величина зависит от нагрузки двигателя, т. е. от значений токов в обмотках статора и ротора [см. (13.2) и (13.3)]. Переменными являются также и добавочные потери (13.8). Что же касается магнитных Рми механических Рмех, то они практически не зависят от нагрузки (исключение составляют двигатели, у которых с изменением нагрузки в широком диапазоне меняется частота вращения).
Коэффициент полезного действия асинхронного двигателя с изменениями нагрузки также меняет свою величину: в режиме холостого хода КПД равен нулю, а затем с ростом нагрузки он увеличивается, достигая максимума при нагрузке (0,7 ÷ 0,8)Рном. При дальнейшем увеличении нагрузки КПД незначительно снижается, а при перегрузке (P2 Рном) он резко убывает, что объясняется интенсивным ростом переменных потерь (Рэ1+ Рэ2+ Рдоб), величина которых пропорциональна квадрату тока статора, и уменьшением коэффициента мощности. График зависимости КПД от нагрузки η = f
(β) для асинхронных двигателей имеет вид, аналогичный представленному на рис. 1.41 (см. рис. 13.7).
КПД трехфазных асинхронных двигателей общего назначения при номинальной нагрузке составляет: для двигателей мощностью от 1 до 10 кВт ηном= 75 ÷ 88%, для двигателей мощностью более 10 кВт ηном=90 ÷ 94%.
Рис. 13.1. Энергетическая диаграмма асинхронного двигателя
Пример 13.1. Трехфазный асинхронный двигатель работает от сети напряжением 660 В при соединении обмоток статора звездой. При номинальной нагрузке он потребляет из сети мощность Р1 = 16,7 кВт при коэффициенте мощности cos ц1 = 0,87. Частота звращения nном = 1470 об/мин. Требуется определилить КПД двигателя з hоm, если магнитные потери Рм = 265 Вт, а механические потери Рмех = 123 Вт. Активное сопротивление фазы обмотки статора r1.20 = 0,8 Ом, и класс нагревостойкости изоляции двигателя F (рабочая температура Ира6=115 °С).
РешениеТок в фазе обмотки статора
I1ном ===16,8 А
где U1 = 380 В.
Сопротивление фазы обмотки статора, пересчитанное на рабочую температуру
θраб = 115 °С, по (13.4)
r1 = r1.20 [1 + б (Ираб — 20)] = 0,8[1 + 0,004(115 — 20)] = 1,1 Ом.
Электрические потери в обмотке статора по (13.2)
Рэ1 = m1 I21ном r1 = 3 * 16,82 * 1,1 = 93 1 Вт.
Электромагнитная мощность двигателя по (13.6)
РЭМ = Р1 — (Рм + Рэ1) = 16,7 * 103 — (265 + 931) = 15504 Вт.
Номинальное скольжение sном = (n1 — nном)/ n1 = (1500 — 1470)/1500 = 0,020 . Электрические потери в обмотке ротора по (13.5)
Рэ2 =sном Рэм = 0,020 * 15504 = 310 Вт.
Добавочные потери по (13.7)
Рдо6 = 0,005 Р1 =0,005 * 16,7 * 103 =83 Вт.
Суммарные потери по (13.9)
Р = Рм + Рэ1 + Рэ2 + Рмех + Рмех = 265 + 931 + 310 + 123 + 83 = 1712 Вт.
КПД двигателя в номинальном режиме по (13.10)
ηном = 1 — Р/ Р1 = 1 — 1712/ (16,7 * 103) = 0,898 , или 89,8%.
Коэффициент полезного действия является одним из основных параметров асинхронного двигателя, определяющим его энергетические свойства — экономичность в процессе эксплуатации. Кроме того, КПД двигателя, а точнее величина потерь в нем, регламентирует температуру нагрева его основных частей и в первую очередь его обмотки статора. По этой причине двигатели с низким КПД (при одинаковых условиях охлаждения) работают при более высокой температуре нагрева обмотки статора, что ведет к снижению их надежности и долговечности (см. § 8.4).
Для выполнения домашней работы необходимо знать устройство и принцип действия асинхронного двигателя и зависимости между электрическими величинами, характеризующими его работу.
Асинхронный трехфазный двигатель с короткозамкнутым ротором при номинальной мощности Р2
, напряжении
Uном
, и токе
Iном
потребляет из сети мощность
Р1
. КПД двигателя
ηном
, а коэффициент мощности
cos φном
. Потери в обмотках статора
Ро1
, в стали статора
Рст1
, в обмотках ротора
Ро2
, механические
Рм.п
. Суммарные потери в двигателе
∑р
. Электромагнитная мощность, передаваемая магнитным потоком ротору,
Рэм
. Двигатель развивает номинальный момент
Мном
и электромагнитный момент
Мэм
при частоте вращения
n2
. Определить величины, отмеченные прочерками в таблице1.
Начертить в масштабе энергетическую диаграмму двигателя.
Таблица 1
| № вар. | Р2 | Uном | Iном | Р1 | η ном | cosφ | Ро1 | Рст1 | Ро2 | Рм.п | ∑р | Рэм | Мном | Мэм | n2 |
| кВт | В | А | кВт | кВт | кВт | кВт | кВт | кВт | кВт | Нм | Нм | об/мин | |||
| — | 15,8 | — | 0,88 | — | 0,25 | — | 0,15 | — | — | 4.73 | 29,8 | — | |||
| — | — | 2,91 | 0,86 | 0,82 | — | 0,1 | 0,08 | 0,05 | — | — | 8,22 | — | — | ||
| 4,5 | — | — | — | 0,85 | 0,25 | — | 0,15 | 0,08 | 0,62 | — | 29,8 | — | — | ||
| — | 5,38 | — | 0,86 | 0,82 | 0,18 | 0,1 | 0,08 | — | — | — | — | — | |||
| — | 22,4 | — | — | — | — | 0,4 | — | 0,2 | 2,2 | 20,8 | — | ||||
| — | 14,2 | — | — | 0,85 | — | 0,2 | — | 0,11 | 0,96 | 7,36 | — | — | |||
| — | — | 22,4 | 22,2 | — | 0,87 | — | 0,6 | — | 2,2 | 20,8 | — | — | |||
| 2,5 | — | 5,38 | — | 0,86 | 0,82 | 0,18 | — | — | 0,05 | — | 2,53 | — | 8,33 | — | |
| — | 22,2 | — | 0,87 | 0,4 | — | 0,2 | — | — | — | 20,8 | — | ||||
| — | 14,2 | 7,96 | — | — | 0,4 | — | 0,25 | — | 0,96 | — | — | 7,36 |
Контрольные вопросы:
1. В чем сущность активной и реактивной мощности асинхронного двигателя?
2. Какие виды потерь имеют место в асинхронном двигателе и какова их природа?
3. Дайте определение КПД асинхронного двигателя.
Gосле проведения анализа проблемы энергосбережения оказалось, что более половину электроэнергии, вырабатываемой в мире, расходуют электродвигатели. Потому над их совершенствованием работают все ведущие электротехнические компании в мире.
Что же такое энергосберегающие двигатели?
Это электродвигатели, КПД которых на 1–10% выше, чем у стандартных двигателей. В крупных энергосберегающих двигателях, разница в значениях КПД составляет 1–2%, а в двигателях малой и средней мощности эта разница составляет уже 7–10%.
КПД электродвигателей Siemens
Увеличение КПД в в энергосберегающих двигателях достигается за счет:
- увеличения доли активных материалов – меди и стали;
- использование более тонкой и высококачественной электротехнической стали;
- применение вместо алюминия меди в роторных обмотках;
- уменьшения воздушного зазора в статоре с помощью прецизионного технологического оборудования;
- оптимизации формы зубцовой зоны магнитопровода и конструкции обмоток;
- использование подшипников более высокого класса;
- особой конструкции вентилятора;
П о статистическим данным, цена всего двигателя составляет менее 2% суммарных затрат на жизненный цикл. Так, если двигатель работает 4000 часов ежегодно в течение 10 лет, то на электроэнергию приходится примерно 97% всех затрат на весь жизненный цикл. Еще около одного процента приходится на монтаж и техобслуживание. Поэтому увеличение КПД двигателя средней мощности на 2% позволит окупить увеличение стоимости энергосберегающего двигателя уже через 3 года, в зависимости от режима работы. Практический опыт и расчеты показывают, что увеличение стоимости энергосберегающего двигателя окупается за счет сэкономленной электроэнергии при эксплуатации в режиме S1 за год-полтора (при годовой наработке 7000 часов).
В общем случае переход к применению энергосберегающего двигателя позволяет:
- увеличить КПД двигателя на 1–10%;
- повысить надежность его работы;
- снизить время простоев;
- уменьшить затраты на техобслуживание;
- увеличить устойчивость двигателя к тепловым перегрузкам;
- повысить перегрузочную способность;
- поднять устойчивость двигателя к ухудшению эксплуатационных условий;
- сниженному и завышенному напряжению, искажению формы кривой напряжения, перекосу фаз и т. д.;
- повысить коэффициент мощности;
- уменьшить уровень шума;
- поднять скорость двигателя за счет уменьшения скольжения;
Отрицательным свойством электродвигателей с повышенным КПД по сравнению с обычными являются:
- на 10 – 30% выше стоимость;
- несколько больше масса;
- более высокая величина пускового тока.
В некоторых случаях использование энергоэффективного двигателя является нецелесообразным:
- при эксплуатации двигателя эксплуатируется короткое время (менее 1–2 тыс.часов/год), внедрение энергоэффективного двигателя может не внести существенного вклада в энергосбережение;
- при работе двигателя в режимах с частым запуском, так как сэкономленная электроэнергия будет израсходована на более высокое значение пускового тока;
- при работе двигателя работает с недогрузом, за счет уменьшения КПД при работе на нагрузку ниже номинальной.
Объемы энергосбережения в результате внедрения энергоэффективного двигателя могут оказаться незначительными по сравнению с потенциалом привода с переменной скоростью.Каждый дополнительный процент КПД требует увеличения массы активных материалов на 3–6%. При этом момент инерции ротора возрастает на 20–50%. Поэтому высокоэффективные двигатели уступают обычным по динамическим показателям, если при их разработке специально не учитывается это требование.
При выборе в пользу энергоэффективного двигателя, необходимо тщательно подходить к вопросу цены. По прогнозам аналитиков медь будет дорожать значительно быстрее стали. Поэтому там, где есть возможность, применять так называемые стальные двигатели (с меньшей площадью пазов), то лучше применять их. Такие двигатели имеют меньшую стоимость за счет экономии меди. По тем же причинам необходимо относиться к энергосберегающим двигателям с постоянными магнитами. Если вам в будущем придется искать замену такого двигателя . может оказаться, что его цена будет слишком высока, а замена его на энергосберегающий двигатель общепромышленного исполнения будет затруднительна из за несоответствия габаритов. По оценкам экспертов постоянные магниты из редкоземельных материалов будут дорожать больше и быстрее, чем медь, что приведет к значительному подорожанию таких двигателей. Хотя такие двигатели при высшем классе энергоэффективности достаточно компактны, их внедрение в промышленность ограничено тем, что постоянные магниты сейчас востребованы в других отраслях, нежели общепром, и, по оценкам специалистов будут использоваться при выпуске специальной техники, на которую денег не жалеют.
“ЭНергоэффективные электродвигатели
Понятие энергоэффективности
Под энергоэффективностью понимается рациональное использование энергетических ресурсов, с помощью которого достигается уменьшение потребления энергии при том же уровне нагрузочной мощности.
На рис. 1а, б приведены примеры нерационального и рационального использования энергии. Мощности Рн приемников 1 и 2 одинаковые, при этом потери ΔР1, выделяющиеся в приемнике 1, значительно превосходят потери ΔР2, которые выделяются в приемнике 2. Как следствие, потребляемая мощность ΔРп1 приемником 1 больше мощности ΔРп2, потребляемой приемником 2. Таким образом, приемник 2 является энергоэффективным по сравнению с приемником 1.
Приемник 1
Рис. 1а. Нерациональное использование энергии
Приемник 2
Рис. 1б. Рациональное использование энергии
В современном мире вопросам энергоэффективности уделяется особое внимание. Объясняется это отчасти тем, что решение данной задачи может привести к достижению основных целей международной энергетической политики:
- повышению энергетической безопасности;
- снижению вредного экологического воздействия вследствие использования энергоресурсов;
- повышению конкурентоспособности промышленности в целом.
В последнее время был принят целый ряд инициатив и мер в отношении энергоэффективности на региональном, национальном и международном уровнях.
Энергетическая стратегия России
В России разработана Энергетическая стратегия, которая подразумевает развёртывание программы энергоэффективности в рамках комплексной политики энергосбережения. Данная программа направлена на создание базисных условий для ускоренного технологического обновления энергетической отрасли, развития современных перерабатывающих производств и транспортных мощностей, а также на освоение новых, перспективных рынков.
23 ноября 2009 г. президентом Российской Федерации Д.А. Медведевым был подписан Федеральный закон № 261-ФЗ «Об энергосбережении и о повышении энергетической эффективности и о внесении изменений в отдельные законодательные акты Российской Федерации». Данный закон формирует принципиально новое отношение к процессу энергосбережения. В нем четко обозначены полномочия и требования в этой области для всех уровней власти, а также заложена основа для достижения реального результата. Законом вводится обязанность по учету энергетических ресурсов для всех предприятий. Организации, совокупные годовые затраты которых на потребление энергоресурсов превышают 10 миллионов рублей, предлагается обязать до 31 декабря 2012 года и далее не реже 1 раза в 5 лет проходить энергетические обследования, по результатам которых составляется энергетический паспорт предприятия, фиксирующий продвижение по шкале энергоэффективности.
С принятием закона ‘Об энергоэффективности’, одними из ключевых статей документа стали поправки в Налоговый кодекс (Статья 67 часть 1), которые освобождают от налога на прибыль предприятия, использующие объекты, имеющие наивысший класс энергоэффективности. Правительство РФ готово оказывать субсидии и снижение налогового бремени тем предприятиям, которые готовы поднять своё оборудование до уровня энергосберегающей техники.
Энергоэффективность электродвигателей
По данным РАО «ЕЭС России» за 2006-й год около 46% вырабатываемой электроэнергии в России потребляется промышленными предприятиями (рис. 1), половина этой энергии посредством электродвигателей преобразуется в механическую.
Рис. 2. Структура потребления электроэнергии в России
В процессе преобразования энергии, часть ее теряется в виде тепла. Величина потерянной энергии определяется энергетическими показателями двигателя. Применение энергоэффективных электродвигателей позволяет существенно снизить потребление энергии и уменьшить содержание углекислого газа в окружающей среде.
Основным показателем энергоэффективности электродвигателя, является его коэффициент полезного действия (далее КПД)
:
η=P2/P1=1 – ΔP/P1,
где Р2 – полезная мощность на валу электродвигателя, Р1 – активная мощность потребляемая электродвигателем из сети, ΔP – суммарные потери возникающие в электродвигателе.
Очевидно, чем выше КПД (и соответственно ниже потери), тем меньше энергии потребляет электродвигатель из сети для создания той же самой мощности P2. В качестве демонстрации экономии электроэнергии при использовании энергоэффективных двигателей сравним количества потребляемой мощности на примере электродвигателей ABB обычной (М2АА) и энергоэффективной (М3АА) серий (рис. 3).
1. Серия М2АА
(класс энергоэффективности IE1): мощность Р2=55 кВт, частота вращения n=3000 об/мин, η=92,4%, cosφ=0,91
Активная мощность, потребляемая из сети:
Р1=Р2/η=55/0,924=59,5 кВт.
Суммарные потери:
ΔP=Р1–Р2=59,5-55=4,5 кВт.
Если предположить, что данный двигатель работает 24 часа в сутки, 365 дней в году, то количество энергии, теряемое и выделяемое в виде тепла
Q=4,5·24·365=39420 кВт.
При средней стоимости электроэнергии 2 руб. за кВт/ч количество потерянной электроэнергии за 1 год в денежном эквиваленте
C=2·39420=78840 руб.
2. Серия М3АА
(класс энергоэффективности IE2): мощность Р2=55 кВт, частота вращения n=3000 об/мин, η=93,9%, cosφ=0,88
Активная мощность, потребляемая из сети:
Р1=Р2/η=55/0,939=58,6 кВт.
Суммарные потери:
ΔP=Р1–Р2=58,6-55=3,6 кВт.
Если предположить, что данный двигатель работает 24 часа в сутки, 365 дней в году, то количество энергии, теряемое и выделяемое в виде тепла
Q=3,6·24·365=31536 кВт.
При средней стоимости электроэнергии 2 руб. за кВт/ч количество потерянной электроэнергии за 1 год в денежном эквиваленте
C=2·31536=63072 руб.
Таким образом, в случае замены обычного электродвигателя (класс IE1) энергоэффективным (класс IE2) экономия энергии составляет 7884 кВт в год на один двигатель. При использовании 10 таких электродвигателей экономия составит 78840 кВт в год или в денежном выражении 157680 руб./год. Таким образом, эффективное использование электроэнергии позволяет предприятию снизить себестоимость выпускаемой продукции, тем самым, повысив ее конкурентоспособность.
Стоимостная разница электродвигателей с классами энергоэффективности IE1 и IE2, составляющая 15621 руб., окупается приблизительно за 1 год.
Рис. 3. Сравнение обычного электродвигателя с энергоэффективным
Следует отметить, что с ростом энергоэффективности увеличивается и срок службы двигателя
. Это объясняется следующим. Источником нагрева двигателя являются потери, выделяемые в нем. Потери в электрических машинах (ЭМ) подразделяются на основные, обусловленные протекающими в ЭМ электромагнитными и механическими процессами, и добавочные, обусловленные различными вторичными явлениями. Основные потери подразделяют на следующие классы:
- 1. механические потери (включают в себя вентиляционные потери, потери в подшипниках, потери на трение щеток о коллектор или контактные кольца);
- 2. магнитные потери (потери на гистерезис и вихревые токи);
- 3. электрические потери (потери в обмотках при протекании тока).
Согласно эмпирическому закону срок службы изоляции уменьшается в два раза при увеличении температуры на 100С. Таким образом, срок службы двигателя с повышенной энергоэффективностью несколько больше, так как потери и следовательно нагрев энергоэффективного двигателя меньше.
Способы повышения энергоэффективности двигателя:
- 1. Применение электротехнических сталей с улучшенными магнитными свойствами и уменьшенными магнитными потерями;
- 2. Использование дополнительных технологических операций (например, отжиг для восстановления магнитных свойств сталей, как правило, ухудшающихся после механообработки);
- 3. Использование изоляции с повышенной теплопроводностью и электрической прочностью;
- 4. Улучшение аэродинамических свойств для снижения вентиляционных потерь;
- 5. Использование высококачественных подшипников (NSK, SKF);
- 6. Увеличение точности обработки и изготовления узлов и деталей двигателя;
- 7. Использование двигателя совместно с частотным преобразователем.
Еще одним важным параметром, характеризующим энергоэффективность электродвигателя, является коэффициент нагрузки cosφ. Коэффициент нагрузки определяет долю активной мощности в полной, поступающей в электродвигатель из сети.
cosφ=Р1/S,
где S – полня мощность.
При этом только активная мощность преобразуется в полезную мощность на валу, реактивная мощность нужна лишь для создания электромагнитного поля. Реактивная мощность поступает в двигатель и возвращается обратно в сеть с удвоенной частотой сети 2f, создавая тем самым в подводящих линиях дополнительные потери. Таким, образом, система, состоящая из двигателей с высоким значениями КПД, но низкими значениями cosφ, не может считаться энергоэффективной.
Препятствия на пути внедрения энергоэффективных систем электропривода
Не смотря на высокую результативность энергоэффективных решений, на сегодняшний день существует ряд препятствий для распространения энергоэффективных систем электропривода:
- 1. Замена только одного или двух электродвигателей на целом предприятии является несущественной мерой;
- 2. Низкий уровень информированности потребителей в области классов энергоэффективности двигателей, их различий и существующих стандартов;
- 3. Раздельное финансирование на многих предприятиях: распорядитель бюджета на закупки электродвигателей часто является не тем лицом, которое занимается вопросами снижения себестоимости выпускаемой продукции или несет ежегодные расходы на техническое обслуживание;
- 4. Приобретение электродвигателей в составе комплексного оборудования, производители которого часто в целях удешевления продукции устанавливают электродвигатели низкого качества;
- 5. В рамках одной компании расходы на приобретение оборудования и на потребление энергии за срок службы часто оплачиваются по разным статьям;
- 6. На многих предприятиях существуют запасы электродвигателей, как правило, того же типа и того же класса эффективности.
Важным аспектом в вопросах, связанных с энергоэффективностью электрических машин
, является популяризация принятия решения на приобретение оборудования на основе оценки суммарных эксплуатационных расходов за срок службы.
Новые международные стандарты, регламентирующие энергоэффективность электродвигателей.
В 2007, 2008-м гг. IEC были введены два новых стандарта, касающихся энергоэффективности электродвигателей
: стандарт IEC/EN 60034-2-1 устанавливает новые правила определения КПД, стандарт IEC 60034-30 – новые классы энергоэффективности электродвигателей.
В стандарте IEC 60034-30 установлены три класса энергоэффективности трехфазных асинхронных электродвигателей с короткозамкнутым ротором (рис. 1).
Рис. 4. Классы энергоэффективности согласно новому стандарту IEC 60034-30
В настоящее время обозначение классов энергоэффективность часто можно увидеть в виде следующих комбинаций: EFF3, EFF2, EFF1. Однако границы разделения классов (рис. 2) установлены старым стандартом IEC 60034-2, на смену которому пришел новый IEC 60034-30 (рис. 1).
Рис. 5. Классы энергоэффективности согласно старому стандарту IEC 60034-2
Принцип работы и число оборотов асинхронных двигателей
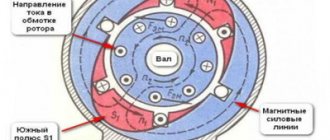
Данный вопрос рассмотрим на примере АДКР, как наиболее распространенного типа электродвигателей подъемно-транспортном и обрабатывающем оборудовании. Напряжение от сети подается на обмотку статора, каждая из трех фаз которой смещена геометрически на 120°. После подачи напряжения возникает магнитное поле, создающее путем индукции ЭДС и ток в обмотках ротора. Последнее вызывает электромагнитные силы, заставляющие ротор вращаться. Еще одна причина, по которой все это происходит, а именно, возникает ЭДС, является разность оборотов статора и ротора.
Одной из ключевых характеристик любого АДКР является частота вращения, расчет которой можно вести по следующей зависимости:
n = 60f / p, об/мин
где f – частота сетевого напряжения, Гц; р – число полюсных пар статора.
Все технические характеристики указываются на металлической табличке, закрепленной на корпусе. Но если она отсутствует по какой-то причине, то определить число оборотов нужно вручную по косвенным показателям. Как правило, используется три основных метода:
- Расчет оборотов с учетом диаметрального шага обмотки. Для определения используется формула вида:
где 2p – число полюсов; Z1 – количество пазов в сердечнике статора; y – собственно, шаг укладки обмотки.
Стандартные значения оборотов:
- Расчет числа полюсов по сердечнику статора. Используются математические формулы, где учитываются геометрические параметры изделия:
2p = 0,35Z1b / h или 2p = 0,5Di / h,
где 2p – число полюсов; Z1 – количество пазов в статоре; b – ширина зубца, см; h – высота спинки, см; Di – внутренний диаметр, образованный зубцами сердечника, см.
После этого по полученным данным и магнитной индукции нужно определить количество витков, которое сверяется с паспортными данными двигателей.
Способы изменения оборотов двигателя
Регулировка оборотов любого трехфазного электродвигателя, используемого в подъемно-транспортной технике и оборудовании, позволяет добиться требуемых режимов работы точно и плавно, что далеко не всегда возможно, например, за счет механических редукторов. На практике используется семь основных методов коррекции скорости вращения, которые делятся на два ключевых направления:
- Изменение скорости магнитного поля в статоре. Достигается за счет частотного регулирования, переключения числа полюсных пар или коррекции напряжения. Следует добавить, что эти методы применимы для электродвигателей с короткозамкнутым ротором;
- Изменение величины скольжения. Этот параметр можно откорректировать за счет питающего напряжения, подключения дополнительного сопротивления в электрическую цепь ротора, применения вентильного каскада или двойного питания. Используется для моделей с фазным ротором.
Наиболее востребованными методами являются регулирование напряжения и частоты (за счет применения преобразователей), а также изменение количества полюсных пар (реализуется путем организации дополнительной обмотки с возможностью переключения).
Типичные схемы регуляторов оборотов
На рынке сегодня есть широкий выбор регуляторов и частотных преобразователей для асинхронных двигателей. Тем не менее, для бытовых нужд подъемного или обрабатывающего оборудования вполне можно сделать расчет и сборку на микросхеме самодельного прибора на базе тиристоров или мощных транзисторов.
Ниже представлен пример схемы достаточно мощного регулятора для асинхронного двигателя. За счет чего можно добиться плавного контроля параметров его работы, снижения энергопотребления до 50%, расходов на техническое обслуживание.
Данная схема является сложной. Для бытовых нужд ее можно значительно упростить, используя в качестве рабочего элемента симистор, например, ВТ138-600. В этом случае схема будет выглядеть следующим образом:
Обороты электродвигателя будут регулироваться за счет потенциометра, который определяет фазу входного импульса, открывающего симистор.
Как можно судить из информации, представленной выше, от оборотов асинхронного двигателя зависят не только параметры его работы, но и эффективность функционирования питаемого подъемного или обрабатывающего оборудования. В торговой сети сегодня можно приобрести самые разнообразные регуляторы, но также можно совершить расчет и собрать эффективное устройство своими руками.
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.
Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Что дает преобразователь?
Необходимость использования регулятора оборотов электродвигателя в случае асинхронных моделей состоит в следующем:
Достигается значительная экономия электрической энергии. Поскольку не всякое оборудование требует высоких скоростей вращения моторного вала, ее имеет смысл снизить на четверть.
Обеспечивается надежная защита всех механизмов. Преобразователь частоты позволяет контролировать не только температуру, но и давление и прочие параметры системы. Этот факт особенно важен, если при помощи двигателя приводится в действие насос.
Датчик давления устанавливается в емкости, посылает сигнал при достижении должного уровня, благодаря чему мотор останавливается.
Совершается плавный пуск. Благодаря регулятору снимается необходимость использования дополнительных электронных устройств. Частотный преобразователь легко настроить и получить желаемый эффект.
Снижаются расходы на техническое обслуживание, поскольку регулятор сводит к минимуму риски поломки привода и других механизмов.
Таким образом электродвигатели с регулятором оборотов оказываются надежными устройствами с широкой сферой применения.
Важно помнить, что эксплуатация любого оборудования на основе электрического мотора только тогда окажется правильной и безопасной, когда параметр частоты вращения будет адекватен условиям использования.
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 — скорость вращения магнитного поля
n2— скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2
Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
f — частота тока
С — ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
Использование ЧП для трёхфазных двигателей
Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:
Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.
Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Что из себя представляют потери сердечников и железа
В некотором роде эти расходы подразделяются на потерю вихревых токов и гистерезисные. Первые можно минимизировать путем применения наслоений, имеющихся на сердечнике. Раз их применяют, то область будет меньше, а сопротивление, соответственно, выше, тем самым станут ниже вихревые токи.
Например, гистерезисные утраты можно минимизировать с помощью высококачественной кремнистой стали. Это влияет на построение.
От того, какой будет частота напряжения, зависит потеря сердечника. У статора частота всего 50 Гц, а у ротора еще меньше — 1,5 Гц и все это из-за того, что при нормальном состоянии работы проскальзывание не более 3%. Как следствие маленькие потери сердечников ротора, если сравнить их с расходами сердечников статора. Как раз по ошибке именно ими некоторые предпочитают пренебрегать при рабочем состоянии.
Что касается потерь трения щеток и механических
В двигателях с асинхронным действием с обмотанным ротором может возникнуть утрата трения щеток. В подшипниках можно встретить механическую потерю. На старте все они на нулевой отметке, но по мере роста скорости траты будут только расти. В трехфазных моторах скорость всегда постоянная. Можно сделать вывод, что и эта потеря будет постоянной, а от нее зависит и построение.
Особенности переменных потерь
Данный вид потерь называется также сокращением меди. Произойти они могут из-за электрических токов, идущих по обмотке ротора и статора. При изменении нагрузки данный ток тоже будет меняться вместе с этими сокращениями. Это послужило возникновению названия переменных утрат. Их получают с помощью проведения тестов с заблокированными роторами 3-х фазных моторов.
Важно!
Основной функцией этих приводов является преобразование электрической энергии в механическую. Во время него энергия будет проходить несколько разных этапов. Когда она проходит по разным ступеням, то будет отображаться на диаграмме, указывающей течение энергии. Всем известно, что на входе трехфазных асинхронных двигателей подача тоже является трехфазной. Поэтому она будет идти на стор 3-х фазного электромотора.
Ротор и статор
Частично эта энергия на входе применяется для того, чтобы поддерживать недостатки статора. А в их роли выступает дефицит меди и железа статора. Та энергия, которая сохранится, пойдет на ротор на входе. Он уже преобразует эти входы на ротор в энергию механического плана. Но этот вход не получится преобразовать в такой же выход, так как он поддерживает нехватку энергии на роторе. Когда ротор вращается, то расход железа будут зависеть от частоты ротора, а она предельно небольшая. Но этим предпочитают пренебрегать. Так что лучше будет, чтобы вход на ротор поддерживали медные утраты.
После создания энергии она пойдет на нагрузку посредством валов. Не избежать появления небольших расходов по механике: (сопротивления воздуха и трения). Поэтому общая воспроизводимая энергия механического характера обязана подаваться на поддержание тех самых потерь.
Расчет механической характеристики асинхронных двигателей
Естественные характеристики механического плана подобных моторов соответствуют основным (паспортным) схемам его включения и номинальным параметрам напряжения питания. А вот их искусственный аналог получится, когда включают кое-что из дополнительных элементов:
- конденсаторов;
- реакторов;
- резисторов.
Когда движок запитывает не номинальное напряжение, то характеристики будут отличаться от естественных характеристик — они крайне удобны и полезны в качестве инструмента, когда анализируют статические и динамические режимы электроприводов. Бывают как искусственные характеристики электромоторов, так и естественные.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
Механическая характеристика
Как основная, помогает проводить детальный анализ работы электродвигателя. Она выражает непосредственную зависимость частоты вращения самого ротора от электромагнитного момента n=f (M).
Из графика видно, что на участке 1-3 машина работает устойчиво. 3-4 — непосредственный отрезок неустойчивой работы. Идеальный холостой ход соответствует точке 1.
Точка 2 — номинальный режим работы. Точка 3 — частота вращения достигла критического значения. Пусковой момент Мпуск — точка 4.
Наши читатели рекомендуют! Для экономии на платежах за электроэнергию наши читатели советуют ‘Экономитель энергии Electricity Saving Box’. Ежемесячные платежи станут на 30-50% меньше, чем были до использования экономителя. Он убирает реактивную составляющую из сети, в результате чего снижается нагрузка и, как следствие, ток потребления. Электроприборы потребляют меньше электроэнергии, снижаются затраты на ее оплату.
Существуют технические способы расчетов и построения механической характеристики с учетом данных паспорта.
В первоначальной точке 1 n0=60f/p (p – количество пар полюсов). Поскольку nн и Mн непосредственно координаты точки 2, расчет номинального момента производится по формуле Mн=9,55*Рн/ nн, где Рн — номинальная мощность. Значение nн указано в паспорте двигателя. В точке 3 Mкр=Mнλ. Пусковой момент в точке 4 Mпуск=Mн*λпуск (значения λ, λпуск — из паспорта).
Механическая характеристика, построенная таким образом, называется естественной. Изменяя другие параметры можно получить искусственную механическую характеристику.
Полученные результаты дают возможность проанализировать и согласовать механические свойства самого двигателя и рабочего механизма.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
- большой диапазон регулирования в сторону понижения скорости вращения.
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Регулирование частоты вращения асинхронного электродвигателя
Асинхронный двигатель (рис. 1) имеет неподвижную часть, которая называется статор, и вращающуюся часть, именуемую ротором. Магнитное поле создается в обмотке, размещенной в статоре. Такая конструкция электродвигателя позволяет регулировать частоту его вращения различными способами.
Основные технические характеристики, учитываемые при изменении частоты вращения
При регулировании частоты вращения асинхронных электродвигателей следует учитывать несколько основных технических показателей, которые в значительной мере влияют на процесс работы двигателей.
- Диапазон регулирования Д, то есть предел, до которого возможно изменять частоту вращения. Эта характеристика вычисляется по соотношению минимальной и максимальной частоты вращения.
- Плавность регулирования — определяется по минимальному скачку частоты вращения электродвигателя, когда осуществляется переход одной механической характеристики на другую.
- Направление изменения частоты вращения двигателя (так называемая зона регулирования). Номинальные условия работы определяют естественную механическую характеристику двигателя. Когда осуществляется процесс регулирования частоты вращения, эти характеристики (напряжение и частота питающей сети) начнут изменяться. В результате получаются искусственные характеристики, которые обычно ниже естественных.
Есть несколько способов регулирования частоты вращения электродвигателя:
Регулирование частоты вращения изменением частоты питающей сети
Регулирование частоты вращения путем изменения частоты в питающей сети считается одним из самых экономичных способов регулирования, который позволяет добиться отличных механических характеристик электропривода. Когда происходит изменение частоты питающей сети, частота вращения магнитного поля также меняется.
Преобразование стандартной частоты сети, которая составляет 50 Гц, происходит за счет источника питания. Одновременно с изменением частоты происходит и изменение напряжения, которое необходимо для обеспечения высокой жесткости механических характеристик.
Регулирование частоты вращения позволяет добиться различных режимов работы электродвигателя:
- с постоянным вращающим моментом;
- с моментом, который пропорционален квадрату частоты;
- с постоянной мощностью на валу.
В качестве источника питания для регулирования могут использоваться электромашинные вращающиеся преобразователи, а также статические преобразователи частоты, которые работают на полупроводниковых приборах, серийно выпускающихся промышленностью.
Несомненным преимуществом частотного регулирования является наличие возможности плавно регулировать частоту вращения в обе стороны от естественной характеристики. При регулировании достигается высокая жесткость характеристик и отличная перегрузочная способность.
Регулирование частоты вращения изменением числа полюсов
Регулирование частоты вращения путем изменения числа полюсов происходит за счет изменения частоты вращения магнитного поля статора. Частота питающей сети остается неизменной, в то время как происходит изменение частоты вращения магнитного поля и частоты вращения ротора. Они меняются обратно пропорционально числу полюсов. Например, число полюсов равно 2, 4, 6, 8, тогда обороты двигателя при изменении их количества будут составлять 3000, 1500, 1000, 750 оборотов в минуту.
Двигатели, которые обеспечивают переключение числа пар полюсов, имеют обычно короткозамкнутый ротор с обмоткой. Благодаря этому ротору обеспечивается возможность работы двигателя без дополнительных пересоединений в цепи.
Изменение частоты вращения включением в цепь ротора с реостатом
Еще одним способом изменения частоты вращения двигателя является включение в цепь ротора с реостатом. Такой метод имеет существенное ограничение, так как может быть применен только для двигателей с фазным ротором. Он обеспечивает плавное изменение частоты вращения в очень широких пределах. Минусом же являются большие потери энергии в регулировочном реостате.
Изменение направления вращения
Изменение направления вращения двигателя может быть осуществлено за счет изменения направления вращения магнитного поля, которое создается обмотками статора. Изменение направления вращения можно достичь, изменив порядок чередования тока в фазах обмотки статора. Для оформления заказа позвоните менеджерам компании Кабель.РФ® по телефону или пришлите заявку на электронную почту с указанием требуемой модели электродвигателя, целей и условий эксплуатации. Менеджер поможет Вам подобрать нужную марку с учетом Ваших пожеланий и потребностей.
Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры. Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2×12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.
Вот мы и рассмотрели способы регулировки оборотов асинхронных двигателей. Если возникли вопросы, задавайте их в комментариях под статьей!