Трехфазные асинхронные двигатели нашли самое широкое применение в промышленности и других областях. Современное оборудование просто невозможно представить без этих агрегатов. Одной из важнейших составляющих рабочего цикла машин и механизмов является их плавный пуск и такая же плавная остановка после выполнения поставленной задачи. Такой режим обеспечивается путем использования преобразователей частоты. Эти устройства проявили себя наиболее эффективными в больших электродвигателях, обладающих высокой мощностью.
С помощью преобразователей частоты успешно выполняется регулировка пусковых токов, с возможностью контроля и ограничения их величины до нужных значений. Для правильного использования данной аппаратуры необходимо знать принцип работы частотного преобразователя для асинхронного двигателя. Его применение позволяет существенно увеличить срок службы оборудования и снизить потери электроэнергии. Электронное управление, кроме мягкого пуска, обеспечивает плавную регулировку работы привода в соответствии с установленным соотношением между частотой и напряжением.
Что такое частотный преобразователь
Основной функцией частотных преобразователей является плавная регулировка скорости вращения асинхронных двигателей. С этой целью на выходе устройства создается трехфазное напряжение с переменной частотой.
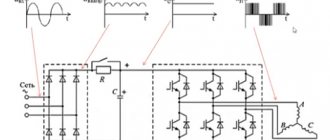
Преобразователи частоты нередко называются инверторами. Их основной принцип действия заключается в выпрямлении переменного напряжения промышленной сети. Для этого применяются выпрямительные диоды, объединенные в общий блок. Фильтрация тока осуществляется конденсаторами с высокой емкостью, которые снижают до минимума пульсации поступающего напряжения. В этом и заключается ответ на вопрос для чего нужен частотный преобразователь.
В некоторых случаях в схему может быть включена так называемая цепь слива энергии, состоящая из транзистора и резистора с большой мощностью рассеивания. Данная схема применяется в режиме торможения, чтобы погасить напряжение, генерируемое электродвигателем. Таким образом, предотвращается перезарядка конденсаторов и преждевременный выход их из строя. В результате использования частотников, асинхронные двигатели успешно заменяют электроприводы постоянного тока, имеющие серьезные недостатки. Несмотря на простоту регулировки, они считаются ненадежными и дорогими в эксплуатации. В процессе работы постоянно искрят щетки, а электроэрозия приводит к износу коллектора. Двигатели постоянного тока совершенно не подходят для взрывоопасной и запыленной среды.
Цифровые модели асинхронного двигателя
На рис. 2 представлена цифровая модель АД, управляемого токами статора, с одной короткозамкнутой рамкой на роторе. Модель построена в системе Matlab 6.5 Simulink 5 по дифференциальным уравнениям ненасыщенного АД, полученным в статье [6] (система уравнений (13)):
где Mm — максимальная взаимоиндуктивность между обмоткой статора и рамкой ротора; l и D — длина и диаметр ротора АД; KB — коэффициент пропорциональности между током обмотки статора и магнитной индукцией на ее оси в воздушном зазоре; J — суммарный момент инерции АД и нагрузки; α — угол поворота ротора.
Рис. 2. Цифровая модель АД с одной короткозамкнутой рамкой на роторе при управлении токами статора
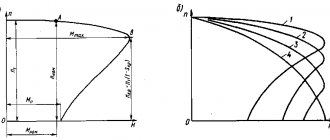
Временные диаграммы абсолютного скольжения (разности синхронной частоты вращения и частоты вращения ротора) в рад/с, тока ротора ia в А и разности электромагнитного момента и момента нагрузки Mr – MН в Н·м при скачкообразном приложении MН к АД, находящемуся в режиме идеального холостого хода (Ω = ω), представлены на рис. 3 и 4. Параметры гипотетического АД: l = 0,6 м, D = 0,4 м, KB = 0,05 Тл/А, Mm/L = 20, r/L = 10p, ω = 100pc-1, Im = 10 А. Расчетное значение максимальной постоянной составляющей электромагнитного момента —Mrmax =27 Н·м, J = 3,84p кгм2.
Рис. 3. Переходной процесс при приложении к АД, находящемуся в режиме идеального холостого хода, тормозящего момента в 1 Н•м
На рис. 3 и 4 представлены процессы при MН = 1 и 0,5 Н·м соответственно. Их анализ показывает, что при одной рамке на роторе в установившемся режиме частота колебаний момента нагрузки и абсолютного скольжения, а значит, и частоты вращения ротора вдвое выше частоты несинусоидального тока ротора.
Рис. 4. Переходной процесс при приложении к АД, находящемуся в режиме идеального холостого хода, тормозящего момента в 0,5 Н•м
При большом числе стержней ротора цифровая модель АД оказывается весьма громоздкой. Для ее упрощения желательна декомпозиция описывающей ее системы дифференциальных уравнений. Полученный в статье [6] результат для установившегося режима при основном способе управления, определяемого выражениями:
и произвольном числе стержней 2N «беличьей клетки» ротора позволяет предположить, что возможна декомпозиция системы уравнений электромагнитного равновесия , уравнение (27’)]:
где Mkj = Lcos((k – j)δ) — взаимоиндуктивность между рамками ротора, k, j = k ≠ j, δ = π/N.
Положим, что система уравнений (3) допускает декомпозицию к виду:
Решение системы дифференциальных уравнений (4) в форме преобразования Лапласа имеет вид:
где
Для подтверждения справедливости декомпозиции системы (3) доказано, что решение (5) системы (4) является решением и системы (3).
Возможность декомпозиции существенно упрощает построение цифровой модели АД, слишком громоздкой при больших значениях N.
На рис. 5 для простоты представлена цифровая модель АД, управляемого токами статора, при трех рамках на роторе (2N = 6).
Рис. 5. Цифровая модель АД, управляемого токами статора, при трех рамках на роторе (2N = 6)
Модель построена в системе Matlab 6.5 Simulink 5 по полученной в статье [6] системе уравнений:
На рис. 6 представлен процесс отработки системы регулирования частоты вращения АД (рис. 1) ступенчато изменяющегося заданного значения частоты вращения (ΩЗ = 20π1(t) – 10π1(t – 7)) рад/с при моменте нагрузки MН = 0. После скачков ΩЗ благодаря постоянной частоте токов ротора (абсолютного скольжения) v = ΩЗ – Ω, соответствующей экстремуму электромагнитного момента АД, процесс изменения частоты вращения АД Ω происходит с максимально возможным при заданном ограничении амплитуды токов статора электромагнитным вращающим моментом АД Mr.
Рис. 6. Процесс отработки ступенчато изменяющегося заданного значения частоты вращения при MН = 0
Для простоты модели число рамок на роторе принято равным 3. Амплитуда токов статора ограничена значением Inmax = 20 √2 A. Остальные гипотетические параметры АД оставлены без изменения. Расчетные значения экстремума Mr составляют Mrэ= 216 Н·м. Пропорциональный регулятор заданной амплитуды токов статора имеет значение K = 20 Ас/рад.
Заметим, что после скачка задающего воздействия процесс нарастания Mr происходит в модели при скачкообразном изменении токов статора, физически не реализуемом.
На рис. 7 представлен процесс при том же входном воздействии ΩЗ и MH = 40 Н·м. В установившихся режимах ошибка управления зависит от момента нагрузки и составляет ∆Ω = 0,607 рад/с. Увеличение Kв в пять раз до K = 100 Ас/рад позволяет уменьшить ∆Ω также в пять раз. Использование ПИ-регулятора вместо П-регулятора позволяет снизить ∆Ω до нуля.
Рис. 7. Процесс отработки ступенчато изменяющегося заданного значения частоты вращения при MH = 40 Н•м
Принцип действия частотного преобразователя
Эффективное и качественное управление асинхронными электродвигателями стало возможно за счет использования совместно с ними частотных преобразователей. Общая конструкция представляет собой частотно-регулируемый привод, который позволил существенно улучшить технические характеристики машин и механизмов.
В качестве управляющего элемента данной системы выступает преобразователь частоты, основной функцией которого является изменение частоты питающего напряжения. Его конструкция выполнена в виде статического электронного узла, а формирование переменного напряжения с заданной изменяемой частотой осуществляется на выходных клеммах. Таким образом, за счет изменения амплитуды напряжения и частоты регулируется скорость вращения электродвигателя.
Управление асинхронными двигателями осуществляется двумя способами:
- Скалярное управление действует в соответствии с линейным законом, согласно которому амплитуда и частота находятся в пропорциональной зависимости между собой. Изменяющаяся частота приводит к изменениям амплитуды поступающего напряжения, оказывая влияние на уровень крутящего момента, коэффициент полезного действия и коэффициент мощности агрегата. Следует учитывать зависимость выходной частоты и питающего напряжения от момента нагрузки на валу двигателя. Для того чтобы момент нагрузки был всегда равномерным, отношение амплитуды напряжения к выходной частоте должно быть постоянным. Данное равновесие как раз и поддерживается частотным преобразователем.
- Векторное управление удерживает момент нагрузки в постоянном виде во всем диапазоне частотных регулировок. Повышается точность управления, электропривод более гибко реагирует на изменяющуюся выходную нагрузку. В результате, момент вращения двигателя находится под непосредственным управлением преобразователя. Нужно учитывать, что момент вращения образуется в зависимости от тока статора, а точнее – от создаваемого им магнитного поля. Под векторным управлением фаза статорного тока изменяется. Эта фаза и есть вектор тока осуществляющий непосредственное управление моментом вращения.
Введение
При регулировании токов статора двигателя, управляемого от автономного инвертора, охваченного отрицательными обратными связями по токам фаз статора [1, 2], можно пренебречь отличием токов статорной обмотки от заданных значений. Это позволяет существенно уменьшить инерционность двигателя, связанную с индуктивностью обмоток статора, и при достаточно плавных изменениях заданных частоты и амплитуды токов статора считать источником питания АД трехфазный управляемый генератор переменного тока, регулирующий мгновенные значения токов статора. В этом случае управляющими воздействиями для АД являются токи статора. Таким образом, можно использовать более простой алгоритм управления, создающий в замкнутом по скорости электроприводе максимальные по величине ускорения при разгоне и торможении, а также минимальные токи статора, обеспечивающие необходимый электромагнитный момент АД в установившемся режиме, по сравнению с известными векторными и скалярными способами управления АД [3–5].
Настройка частотного преобразователя для электродвигателя
Для того чтобы преобразователь частоты для асинхронного двигателя в полном объеме выполнял свои функции, его необходимо правильно подключить и настроить. В самом начале подключения в сети перед прибором размещается автоматический выключатель. Его номинал должен совпадать с величиной тока, потребляемого двигателем. Если частотник предполагается эксплуатировать в трехфазной сети, то автомат также должен быть трехфазным, с общим рычагом. В этом случае при коротком замыкании на одной из фаз можно оперативно отключить и другие фазы.
Ток срабатывания должен обладать характеристиками, полностью соответствующими току отдельной фазы электродвигателя. Если частотный преобразователь планируется использовать в однофазной сети, в этом случае рекомендуется воспользоваться одинарным автоматом, номинал которого должен в три раза превышать ток одной фазы. Независимо от количества фаз, при установке частотника, автоматы не должны включаться в разрыв заземляющего или нулевого провода. Рекомендуется использовать только прямое подключение.
При правильной настройке и подключении частотного преобразователя, его фазные провода должны соединяться с соответствующими контактами электродвигателя. Предварительно обмотки в двигателе соединяются по схеме «звезда» или «треугольник», в зависимости от напряжения, выдаваемого преобразователем. Если оно совпадает с меньшим значением, указанным на корпусе двигателя, то применяется соединение треугольником. При более высоком значении используется схема «звезда».
Далее выполняется подключение частотного преобразователя к контроллеру и пульту управления, который входит в комплект поставки. Все соединения осуществляются в соответствии со схемой, приведенной в руководстве по эксплуатации. Рукоятка должна находиться в нейтральном положении, после чего включается автомат. Нормальное включение подтверждается световым индикатором, загорающимся на пульте. Для того чтобы преобразователь заработал, нажимается кнопка RUN, запрограммированная по умолчанию.
Выводы
Асинхронные электродвигатели по многим параметрам превосходят двигатели постоянного тока. Превосходство это касается и устройства и надёжности. Поэтому во многих случаях пользователи выбирают именно асинхронные двигатели, руководствуясь именно соображениями насчёт их превосходства над другими устройствами.
Механическое управление током вызывает некоторые негативные последствия, так как при использовании этого варианта управления нельзя быть уверенным в стопроцентной и качественной работе оборудования. Использование частотных преобразователей для асинхронных двигателей имеет свои очень важные преимущества, которые немаловажны во многих аспектах работы с двигателями. Одним из самых главных плюсов использования электронного управления и частотников является тот факт, что эти устройства позволяют экономить расход потребляемой электроэнергии. К тому же и мощность будет больше.
Частотники следует выбирать, беря во внимание множество характеристик, которые прописываются в документации, приложенной к устройству. Частотные преобразователи, сделанные кустарно, могут пригодиться в бытовых условиях, но на производстве их использовать не стоит.
Эксплуатация преобразователей должна проводиться грамотно, в соответствии со всеми рекомендациями и правилами. Это позволит улучшить качество работы оборудования. К тому же многие советы позволят продлить работу двигателю и преобразователю. Крайне рекомендуется следить за напряжением. В случае критического повышения напряжения могут взорваться конденсаторы. Частотники должны быть использованы с оглядкой на все основные правила безопасности. Рекомендуется не браться за работу с ними в отсутствие всех необходимых знаний в этой области.