Основные составные части ПЧ: выпрямитель, звено постоянного тока, инвертор
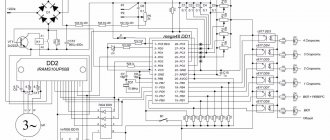
Рис. 1. Принципиальная схема ПЧ
Выпрямитель строится на выпрямительных диодах либо, что бывает реже, по диодно-тиристорной схеме. Остановимся на самом простом – диодном выпрямлении.
Трехфазное сетевое напряжение с частотой 50 Гц и напряжением 380 В поступает на вход выпрямителя. После выпрямления мы получаем пульсирующее напряжение, оно уже имеет определенного рода пульсации, но постоянным еще не является. Постоянным напряжение становится после попадания на звено постоянного тока и сглаживания пульсаций. Между выпрямителем и звеном постоянного тока расположен так называемый резистор предзаряда.
Резистор предзаряда
ограничивает ток заряда конденсаторов в первый момент времени, таким образом предохраняя диоды выпрямителя и сеть от большого броска тока. По мере заряда конденсатора этот резистор отключается и в дальнейшей работе участия не принимает.
Звено постоянного тока
представляет собой, как правило, набор конденсаторов довольно большой емкости. Задача этого элемента максимально сгладить пульсации напряжения, привести его к постоянному значению. В нормальной ситуации, когда сетевое переменное напряжение 380 В, значение на звене выпрямленного постоянного тока составляет 540 В. Если сетевое напряжение больше или меньше, то величина выпрямленного напряжения пропорционально увеличивается или уменьшается.
Как подключить и настроить ПЧ
Подключение можно выполнять, как к трёхфазной (380 В), так и однофазной сети (220 В). При присоединении следует обеспечить следующие действия (для обоих вариантов):
- установить защитный автомат в фазной цепи перед преобразователем (однофазный или трёхфазный выключатель);
- выходы фаз ПЧ соединить с контактами обмоток электродвигателя, предварительно соединённых в «звезду» или «треугольник» (отмечено в инструкции по эксплуатации частотника);
- подключить к аппарату и разместить в доступном месте управляющий ПЧ пульт.
Подключение ПЧ к трёхфазной сети
Важно! Токи автоматических выключателей подбираются по току фазы (Iф) для трёхфазной сети и трёхкратному Iф – для однофазной сети.
Подключение ПЧ к однофазной сети
После того, как схема собрана, регулятор вращения вала мотора убирают в минимальное положение. Далее выполняется следующее:
- включают автомат и подают питание;
- фиксируют включение по индикации светодиодов на панели (начальные показания);
- далее нажимают кнопку «ПУСК» («RUN») кратковременным нажатием (пуск осуществится по запрограммированным изготовителем параметрам «по умолчанию»);
- медленное вращение вала в нужную сторону указывает на правильную регулировку, в противном случае изменяют направление движения с помощью опции «реверс»;
- после пуска выставляют желаемую частоту вращения вала электродвигателя.
Внимание! Возможно, на дисплее высвечивается частота напряжения питания (Гц) вместо значений частоты, с которой вращается вал (об./мин.). Не стоит путать эти две величины.
Структура и особенности работы инвентора
После выпрямителя напряжение поступает на инвертор. Инвертор является самой сложной и важной частью преобразователя частоты. С выхода инвертора сигнал поступает уже непосредственно на электродвигатель. Форма напряжения на выходе инвертора представляет собой набор прямоугольных импульсов разной ширины и определенной длительности. Так строится силовая часть преобразователя частоты.
Схема прибора включает в себя также слаботочные цепи, которые помогают взаимодействию всех основных частей ПЧ. В частности, есть центральный процессор, который является, по сути, мозгом преобразователя, управляет как работой инвертора, так и других частей устройства. Информацию о выходном токе процессор получает от датчиков тока, расположенных на выходных цепях ПЧ. Сигнал с датчиков тока обрабатывается, и процессор далее формирует управляющий алгоритм, чтобы преобразователь мог функционировать в заданных пользователем условиях. Также еще есть источник питания собственных нужд, он питает как процессорную часть, так и часть, отвечающую за измерения выходного тока и измерение напряжения на звене постоянного тока. Помимо этого, есть блок драйверных микросхем, которые в свою очередь управляют транзисторами инверторной части, и еще ряд вспомогательных элементов.
Рис. 2. Принципиальная схема инвертора
Рассмотрим принципиальное устройство инверторной части. Основными элементами силовой части инвертора являются IGBT-транзисторы – мощные, специально спроектированные для работы в ключевом режиме. Это гибрид полевого и биполярного транзисторов. Управляющая часть представляет собой изолированный затвор (как у полевого), а силовая часть повторяет устройство биполярного, у которого имеется коллектор–эмиттер.
Силовые элементы выпускаются в виде сдвоенного модуля, состоящего из двух силовых транзисторов, включенных последовательно. Каждый из транзисторов шунтируется диодом в обратном направлении. Поскольку на выходе должно быть 3 фазы, в конструкции инвертора имеется 3 плеча (см. рис 2).
Рис. 3. Эквивалентная схема работы транзисторов
Чтобы лучше понять принцип работы, рассмотрим эквивалентную схему, где каждый транзистор заменен обычным выключателем. На схеме (рис. 3) условными обозначениями показаны 6 выключателей (транзисторов) и электродвигатель.
Изучим, как формируются выходные токи в обмотках двигателя. За управление транзисторами (переключателями на схеме) отвечает центральный процессор. Он переключает их строго по определенной программе, которая задается изначально алгоритмом его действия.
На схеме показано срабатывание ключей № 1, № 4, № 6. Обратите внимание, категорически не допускается ситуация, когда в одном плече замкнут и верхний ключ, и нижний – это короткое замыкание и отказ изделия. В ситуации, показанной на схеме, ток протекает через открытый ключ № 1, далее заходит в обмотку А электродвигателя, выходит из обмоток B и C, и через открытые нижние ключи №4 и № 6 уходит в минусовое звено.
Для того чтобы поменять ток в обмотке C, нужно переключить ключи среднего плеча. Ток по-прежнему будет протекать через открытый ключ № 1, а уходить через обмотку B и ключ №6 в минусовое плечо. При этом, одновременно, через замкнутый ключ № 3 и втекающий ток через обмотку C уходит в минус. Меняя положение открытых и закрытых ключей можно менять ток в обмотках двигателя. Если это делать по определенной программе, то получится изменяемый ток, как при работе двигателя от сети, то есть будет происходить плавное перетекание одной фазы в другую.
Рис. 4. Протекание тока в инверторе
Теперь вместо упрощенной схемы с выключателями рассмотрим, как протекает ток в цепи транзисторов на примере реального инвертора (рис. 4). По своей сути этот процесс ничем не отличается от рассмотренного ранее ключевого режима, за исключением того, что мы имеем дело с реальным двигателем, который, в принципе, является индуктивной нагрузкой.
В момент закрытия ключа индуктивность двигателя не позволит току мгновенно прекратиться за счет явления самоиндукции. Этот остаточный ток гасится обратными диодами, которые подключены к закрытым транзисторам (см. рис. 4), т.е. в момент выключения (закрывания) транзисторов остаточный ток протекает через обратные диоды, таким образом предотвращаются выбросы напряжения на ключе.
Но поскольку транзистор работает как ключ, он может выдать либо полное напряжение на двигатель, либо не выдать вообще. На практике же нужно получить некое плавное напряжение синусоидальной формы, причем изменяемое как по величине, так и по частоте, для того чтобы иметь возможность управлять скоростью вращения асинхронного двигателя.
Преобразователи частоты
Преобразователи частоты — это электронные приборы, которые служат для преобразования сетевого трёхфазного или однофазного переменного напряжения c частотой 50 (60) Гц в трёхфазное или однофазное напряжение c частотой от долей Гц до сотен Гц, а в некоторых случаях до тысяч Гц. Частотные преобразователи применяются для плавного регулирования скорости асинхронного электродвигателя или синхронного двигателя за счет создания на выходе преобразователя электрического напряжения заданной частоты. В простейших случаях регулирование частоты и напряжения происходит в соответствии с заданной характеристикой V/f, в более совершенных преобразователях реализовано, так называемое, векторное управление. В нашей номенклатуре имеются частотники (Intek SPK и SPE), в которых, кроме обычных режимов (V/f и векторный), имеется режим, при котором напряжение и частота на выходе преобразователя могут регулироваться независимо друг от друга. В преобразователях серии SPK возможно подключение энкодера, как датчика обратной связи.
Преобразователи частоты состоят из выпрямителя (выпрямительного моста), преобразующего переменный ток промышленной частоты в постоянный, и инвертора, преобразующего постоянный ток в переменный требуемой частоты и амплитуды. Выходные транзисторы (IGBT) переключаются по сложному алгоритму (используется режим, так называемой, широтно-импульсной модуляции – ШИМ). Выходное напряжение формируется из «вырезанных» участков напряжения звена постоянного тока. Как правило, преобразователь этим импульсным напряжением обеспечивает питание электродвигателя. За счет использования частотного регулирования появляется возможность управлять производительностью технологического оборудования, что положительно сказывается на его функциональности и показателях энергоэффективности, а также надежности работы. В случае, если кабель соединяющий преобразователь и двигатель имеет значительную длину, то из-за электрической емкости этого кабеля возникают импульсы выходного тока. Для защиты преобразователя от этих импульсов между ним и двигателем иногда ставят дроссель. Преобразователи частоты при своей работе создают токи высших гармоник в питающей сети, что приводит к ухудшению качества электроэнергии. Для защиты сети от электромагнитных помех, возникающих из-за работы силовых транзисторов, на входе преобразователя устанавливают фильтр электромагнитной совместимости (EMC). Если сеть питания «засорена» коммутационными выплесками напряжения, а также для снижения эффективного значения питающего тока во входной силовой цепи преобразователя устанавливается сетевой дроссель переменного тока.
Приобрести преобразователи частотыПреобразователи частоты Intek можно в нашей компании. Если у Вас имеются вопросы по выбору модели, свяжитесь с нашей технической службой и получите консультацию. Если у Вас имеются специальные требования, наша компания готова проанализировать их и порекомендовать необходимое оборудование. При эксплуатации, либо обслуживании частотного преобразователя необходимо соблюдать все меры предосторожности. Помните, что в конструкции устройства имеются электролитические конденсаторы, которые длительно сохраняют заряд даже после отключения от сети. Поэтому, перед тем, как производить обслуживание преобразователя частоты, необходимо дождаться их разряда. В конструкции частотных преобразователей присутствуют элементы, которые боятся статического электричества. В частности, это относится к микропроцессорной системе управления. Поэтому преобразователь должен быть надежно заземлен не только для защиты обслуживающего персонала от поражения электрическим током, но и для защиты внутренних элементов от статического электричества.
Принцип работы преобразователя частоты на IGBT транзисторахВ преобразователях используется двойное преобразование электрической энергии: входное синусоидальное напряжение с постоянной амплитудой и частотой выпрямляется в выпрямителе, сглаживается электролитическими конденсаторами, а затем вновь преобразуется инвертором в переменное напряжение изменяемой частоты и амплитуды. Типовая схема преобразователя частоты представлена на рисунке ниже. В нижней части рисунка изображены графики напряжений на основных элементах преобразователя.
После выпрямителя устанавливается резистор, который выполняет функцию ограничения тока заряда конденсаторов в момент включения преобразователя в сеть. Через несколько секунд после включения это сопротивление шунтируется контактами реле (иногда для целей шунтирования используется тиристор). С выхода емкостного фильтра постоянное напряжение поступает на вход инвертора. Инвертор современных преобразователей выполняется на основе силовых биполярных транзисторов с изолированным затвором IGBT. В инверторе осуществляется преобразование постоянного напряжения в трехфазное (или однофазное, если преобразователь предназначен для питания однофазных электродвигателей) импульсное напряжение изменяемой амплитуды и частоты. По сигналам системы управления соответствующие силовые транзисторы инвертора подсоединяют обмотки электрического двигателя к положительному и отрицательному полюсам звена постоянного тока. Длительность подключения каждой обмотки в течение времени различная. Наибольшая ширина импульса должна быть в середине полупериода, а к началу и концу полупериода она уменьшается. Таким образом, система управления обеспечивает широтно-импульсную модуляцию (ШИМ) напряжения, прикладываемого к обмоткам двигателя. Амплитуда и частота напряжения определяются системой управления транзисторами. При высокой несущей частоте ШИМ (1…15 кГц) обмотки двигателя вследствие их индуктивности работают как фильтр. Поэтому токи, протекающие через них, сглаживаются и имеют практически синусоидальную форму. Таким образом, на выходе преобразователя частоты формируется трехфазное (или однофазное) переменное напряжение изменяемой частоты и амплитуды.
Экономическая эффективность применения преобразователя частотыПреобразователи частоты, предлагаемые нашей компанией, возможно использовать в промышленных системах, где требуется поддержание на заданном уровне некоторого технологического параметра. Этот параметр измеряется соответствующим датчиком, сигнал которого подается на специальный вход преобразователя. Часто решение этой задачи используется в системах, где требуется поддержать давление в магистральном трубопроводе. Электродвигатель насоса в этом случае питают от частотного преобразователя, задающего такую скорость вращения насоса, при которой давление в магистрали стабилизируется. Срок окупаемости затрат после установки преобразователя в систему, как правило, меньше полугода. Экономическая выгода достигается за счет существенного снижения потребления электроэнергии по сравнению с системой, где давление регулируется, например, задвижкой или перепускным вентилем. Наибольшая экономическая эффективность использования ПЧ достигается, если система вентиляции или водоснабжения большую часть времени недогружена. Такая периодическая недогрузка свойственна этим системам. Например, в суточной кривой расхода воды, как правило, имеются два явных максимума – утром и вечером. Исходя из этих максимумов, выбирается мощность магистрального насоса. В остальное время суток насос работает с небольшой нагрузкой. Именно в это время ПЧ позволяет снизить потребление электроэнергии.
В номенклатуре изделий, предлагаемых нашим покупателям, все ПЧ имеют встроенный регулятор, позволяющий использовать этот преобразователь для автоматического поддержания давления воды или расхода воздуха на требуемом уровне. Встроенный источник напряжения (24 В постоянного тока) позволяет обеспечить питание технологического датчика без использования дополнительных блоков.
Для чего нужны дроссели при работе с преобразователями частоты? Входные дроссели снижают вероятность повреждения преобразователя из-за коммутационных импульсных перенапряжений или большого дисбаланса фазного напряжения (>2%) в линии питания. Также входные дроссели служат для приближения к синусоиде формы входного тока преобразователя, что, в свою очередь, уменьшает действующее значение этого тока и нагрев проводов.
Импульсные перенапряжения могут быть вызваны следующими факторами:
- Установкой рядом с приводом мощного силового электронного оборудования (например: приводы постоянного и переменного тока, промышленные выпрямители, установки улучшения коэффициента мощности и т.п.).
- Электродвигателями с запуском непосредственно от сети с помощью магнитных пускателей или софт-стартеров.
- Авариями в системе электроснабжения.
- Использованием сварочного оборудования рядом с преобразователями.
Выход из строя преобразователей из-за импульсных перенапряжений или некачественного напряжения питания не являются гарантийными случаями.
Выходные дроссели должны обязательно использоваться в случаях, если длина силового кабеля, соединяющего преобразователь и двигатель, превышает величину, оговоренную в инструкции по эксплуатации этого прибора. Также выходные дроссели устанавливают, если преобразователь питает несколько двигателей. Различают подсоединение нагрузок «веером» или «шлейфом». При «веере» все моторные кабели соединяются на выходе преобразователя. В этом случае установка выходных дросселей обязательна. Следует заметить, что выходные дроссели значительно уменьшают вероятность отказа преобразователя при коротких замыканиях в цепи двигателя, и особенно при коротких замыканиях «на землю».
Что такое скалярное и векторное управление в преобразователе частоты?Скалярное управление (или частотное управление V/f) предполагает следующий алгоритм работы преобразователя. В зависимости от задания, на выходе преобразователя формируется напряжение определенной частоты и величины. Это напряжение предназначено для питания обмоток электродвигателя. Однако, нет контроля над тем, как на самом деле вращается двигатель. Предполагается, что двигатель должен вращаться «правильно». Контролируется лишь уровень тока, чтобы он не превышал определенные значения, опасные для двигателя и преобразователя. Нижний предел регулирования частоты вращения двигателя при таком алгоритме, как правило, составляет около 10% от номинальной скорости. Название «скалярное управление» вошло в технический обиход для противопоставления его векторному режиму работы преобразователя. Векторное управление без датчика скорости (так называемое управление SVC — Sensorless vector control) является усовершенствованным методом управления асинхронными двигателями. При таком управлении микропроцессор преобразователя производит вычисление вектора магнитного потока, значений скорости и вращающего момента подключенного электродвигателя. Вычисления выполняются с использованием данных измерения напряжения и тока двигателя. Для того, чтобы вычисления были корректными необходимо использовать также данные о параметрах подключенного электродвигателя (его сопротивления, индуктивности и пр.). Часть данных вводится в память преобразователя из паспортной таблички («шильдика») двигателя, значения других параметров определяет сам преобразователь, используя специальную предварительную процедуру настройки на конкретный двигатель. В процессе работы, после того, как микропроцессор произведет расчеты, вычисленные значения скорости или момента сравниваются с заданными значениями и по их рассогласованию формируется напряжение, подаваемое на двигатель с помощью инвертора преобразователя. Все векторные преобразователи могут работать, как в векторном, так и в скалярном режимах. Преимущества, которые обеспечивает векторное управление SVC, следующие:
- Значительно более широкий диапазон регулирования скорости вращения по сравнению со скалярным управлением. Диапазон может достигать значение 1:100. То есть при задании скорости 1% от номинального значения, вращение двигателя будет сохраняться независимо от того, какую нагрузку он испытывает. У двигателей малой мощности (до 0,55 кВт) этот диапазон, как правило, несколько ниже — 1:50.
- Ток двигателя, а, следовательно, и потери мощности в нем, на малых скоростях вращения меньше, чем при скалярном управлении.
- Возможность работы в режиме регулирования вращающего момента на валу асинхронного электродвигателя (при скоростях, отличающихся от нулевой).
Независимо от того, какой режим — векторный или скалярный используется преобразователем для управления асинхронным двигателем, всегда необходимо обеспечить условия охлаждения этого электродвигателя. Ситуация с перегревом двигателя может возникнуть в длительном режиме работы на малых скоростях (до 50% от номинальной скорости). В этом случае необходимо устанавливать принудительное охлаждение двигателя с помощью дополнительного вентилятора. Следует помнить, что при векторном режиме к преобразователю нельзя подключать группу двигателей, а при замене двигателя следует проводить настройку преобразователя под этот конкретный двигатель. Некоторые наши преобразователи частоты Преобразователи частоты Intekс мощностью более 5,5 кВт позволяют работать в режиме с датчиком обратной связи (энкодер, резольвер) на валу двигателя. Это позволяет обеспечить работоспособность привода с диапазоном регулирования скорости 1:1000.
Тормозной резисторТормозной резистор необходим для рассеивания энергии, которая поступает от двигателя к преобразователю. Двигатель, в этом случае, работает в генераторном режиме работы. Такой режим может возникать при торможении инерционных масс нагрузки или при опускании груза в подъёмно-транспортном механизме. В этих случаях двигатель, как бы, опережает ту скорость, с которой он должен вращаться. Нагрузка «подталкивает» ротор двигателя, помогает ему вращаться. Энергия, идущая от двигателя к преобразователю, накапливается в звене постоянного тока этого преобразователя и может привести к недопустимому перенапряжению на конденсаторах. Для того, что бы этого не происходило в преобразователях, как правило, имеется дополнительный, тормозной транзистор (тормозной прерыватель, 7-ой транзистор), который в нужный момент подключает тормозной резистор к звену постоянного тока. И «лишняя» энергия, нагревая резистор, превращается в тепло.
Выбор преобразователя частоты для конкретного примененияПри выборе преобразователя частоты для определенного двигателя необходимо чтобы номинальный ток преобразователя частоты был не меньше, чем номинальный ток двигателя. Напряжение на выходе преобразователя частоты должно соответствовать напряжению двигателя. Также необходимо проверить максимально допустимый кратковременный ток выдаваемый преобразователем частоты, чтобы обеспечить требуемую перегрузочную способность двигателя. Приведем ниже примеры выбора преобразователя по перегрузочной способности. (В каждом отдельном случае вопрос должен решаться индивидуально).
| Наименование области применения регулируемого привода | Перегрузочная способность преобразователя | Примечания, рекомендации |
| Центробежные насосы, вентиляторы | 120% в течении 1 минуты | Преобразователь частоты можно брать с номинальной мощностью на шаг ниже мощности двигателя и переводить его в режим работы с облегченной нагрузкой |
| Транспортные механизмы, конвейеры, подавляющее число других применений | 150% в течении 1 минуты | — |
| Экструдеры, главный привод металлорежущего станка и т.п. | 200% в течении 1 минуты | Преобразователь частоты следует брать с номинальной мощностью на шаг выше мощности двигателя и проводить настройку токовых защит и токоограничений в преобразователе, согласно данным паспортной таблички двигателя и требуемым перегрузкам |
Особенности преобразователя частоты для высокоскоростного электрошпинделяПоскольку высокоскоростные электрошпиндели работают при высоких частотах 200-2000 Гц, то для обеспечения работы двигателя необходимо, чтобы несущая частота (ШИМ) преобразователя частоты была, на порядок (в 10 раз) выше номинальной частоты двигателя. Например, если шпиндель имеет номинальную частоту 400 Гц, то преобразователь частоты должен иметь настройку несущей частоты ШИМ 4 кГц и более. Следует помнить, что при большой частоте ШИМ потери энергии в силовых транзисторах увеличиваются и в отдельных случаях, требуется увеличение установочной мощности преобразователя.
Предельные частоты работы асинхронного привода Ниже речь пойдет о приводе, состоящем из асинхронного двигателя с номинальной частотой 50 Гц и преобразователя частоты. В практических применениях выходную частоту преобразователя редко поднимают выше 70 Гц. Это связано в первую очередь с тем, что роторы двигателей на заводе-изготовителе проходят балансировку (если проходят) на частоте 50 Гц и большой подъём частоты может привести к недопустимым вибрациям и даже к механическим повреждениям двигателя и его обмоток. Также на повышенной частоте вращения увеличиваются тепловые потери в стали. Однако, из-за увеличения интенсивности обдува вентилятором, данные потери, как правило, не приводят к перегреву двигателя. Следует помнить, что развиваемый двигателем момент падает при частотах вращения выше, чем номинальная частота. Это связано с «нехваткой» напряжения на выходе преобразователя и, как следствие, с так называемым, размагничиванием асинхронного двигателя. Приблизительно можно считать, что уменьшение вращающего момента происходит обратно-пропорционально увеличению частоты над номинальным значением. (То есть при 70 Гц вращающий момент двигателя составляет примерно 72% от своего номинального значения).
Алгоритм работы ШИМ
Далее рассмотрим, как формируется выходное напряжение методом широтно-импульсной модуляции (ШИМ). Для примера возьмем некую гидравлическую модель, которая нам поможет понять, что происходит.
Рис. 5. Гидравлическая модель
Представим себе, что имеется ряд емкостей сосудов. В нижней части у каждого есть отверстия. С помощью некого устройства, которое выдает капельки воды определенных размеров с неизменной частотой, начинаем наполнять эти сосуды. Понятно, что там, где размер капель небольшой, уровень жидкости установится на низком уровне, а чем больше размер капель, тем более высокий уровень будет иметь жидкость в сосуде. Подобрав определенным образом размер капель, можно получить огибающую этих уровней (см. рис. 5). Таким образом получилось изобразить статическую картину, которая дает понимание процесса, как можно из дискретных частей сделать некое подобие аналоговых.
Теперь перейдем к работе в динамике. Представим, что сосуд один, но меняем размер капель, которыми он заполняется. В нижней части рис. 5 показан процесс в этот момент времени – по оси x время (t), по оси y напряжение (U) или, по-другому – уровень воды в сосуде. По мере того, как изменяется размер капли, изменяется и средний уровень жидкости, он возрастает, а затем начинает падать. Это уже динамический процесс. Теперь проводим аналогию с электричеством.
Рис 6. Преобразование дискретного сигнала в аналоговый
На рис. 6 наглядно показано, что происходит с дискретным сигналом, если мы будем открывать ключ и закрывать с определенной частотой и на определенное время: чем шире импульс открытия транзистора, тем выше некий средний уровень напряжения (красная огибающая сигнала).
Введем несколько параметров и объясним их.
- Период сигнала ШИМ – это время между импульсами. Параметр строго задан и не меняется (из ранее описанного примера это когда капельки все капают с одинаковой частотой, только разного размера).
- Частота ШИМ-модуляции — обратно пропорциональна длительности периода, это то, что мы имеем как один из параметров при программировании преобразователя частоты. Определяет частоту следования импульсов на выходе каждого из каналов IGBT-модуля.
- Длительность импульса (t-импульса). Определяется уже самим процессором. То есть процессор в зависимости от заданного значения выходного сигнала в данный момент определяет, на какое время нужно открыть каждый ключ. Если рассмотреть общий период изменения этих колебаний, будем иметь период выходной частоты (t-выходная). Это выходная частота, которая будет у нас на выходе преобразователя частоты. От нее прямо пропорционально зависит скорость вращения двигателя.
За тем, чтобы двигатель не перегружался, и напряжение, которое подводится к нему на этой частоте, пропорционально уменьшалось или увеличивалось, следит преобразователь частоты. Он сам определяет необходимое время открытия каждого ключа, то есть определяя t-импульс. И такая ситуация происходит одновременно на трех каналах, ведущих на выход преобразователя на электродвигатель.
Из рисунка видно, что чем чаще будут идти импульсы, тем ближе форма напряжения будет к синусоидальной.
Классификация преобразователей частоты
Техническое устройство, преобразующее переменное напряжения одной частоты на входе, в изменяющееся по определенному закону переменное напряжение, но уже другой частотой на выходе называется преобразователем частоты (ПЧ). Бывают двух типов:
- Непосредственные
- Двухзвенные
Непосредственные – это реверсивный тиристорный преобразователь. Главное его достоинство в том, что он подключается напрямую в сеть без дополнительных устройств.
Двухзвенные – представляют собой транзисторный или тиристорный преобразователь. Но главное их отличие от непосредственных преобразователей в том, что для корректной и безопасной работы инвертора необходимо звено постоянного напряжения. Соответственно для подключения их к общепромышленным сетям необходим выпрямитель. Как правило изготавливаются комплектными (инвертор и выпрямитель поставляются вместе и работают от одной системы управления).
Критерии выбора частоты
На практике частота ШИМ может задаваться пользователем, как правило, в пределах от 1 до 15 килогерц. Для того чтобы получить напряжение по форме более-менее близкой к синусоидальной, частота ШИМ должна быть в 20-30 раз больше максимальной выходной частоты, которую вы хотите получить.
Вы можете выбрать частоту ШИМ произвольно под свою конкретную задачу. Есть несколько параметров, которые определяют выбор.
Рис.7. Параметры, влияющие на выбор частоты ШИМ
1. Длина кабеля до двигателя. Чем длиннее кабель, тем меньшую частоту ШИМ можно задать. Например если у вас длина кабеля 100 метров и больше, то частоту ШИМ больше 2,3 килогерц нет смысла ставить, иначе на этой длине будут большие потери и напрасный расход мощности.
2. Акустический шум двигателя. При питании двигателя от преобразователя частоты слышится посторонний шум. Он зависит именно от частоты ШИМ, которую вы задали. Чем она выше, тем выше тон звука. Если задана чистота более 8,10 килогерц, шума практически не слышно. На более низких частотах (1,3,5 килогерц) этот шум значителен и вызывает дискомфорт.
3. Максимальная выходная частота. Большинство двигателей используют максимальную выходную частоту инвертора 50 гц, поэтому здесь частота ШИМ должна быть не менее чем в 20 раз выше. Здесь можно задавать частоту 1, 2, 3, 5 килогерц из всего диапазона.
Если вы используете высокоскоростной двигатель, например 400-герцевый, то здесь уже частоту ШИМ 1,3,5 килогерц ставить не стоит: на выходе будет не синусоида. Для таких скоростных двигателей частота ШИМ выбирается максимально возможной для данного инвертора, скажем, 15 килогерц.
4. Тепловыделение инверторной части преобразователя. Оно связано с тем, что IGBT-транзисторы, которые формируют выходное напряжение, не идеальны, подвержены разогреву в процессе работы. Для того чтобы эффективно отводить тепло, надо применять соответствующие радиаторы, вентиляторы охлаждения. Чем больше тепловыделение в этой инверторной части, тем более мощные приборы для охлаждения надо использовать.
Методы управления электропривода
Для решения задач регулирования скорости и момента в современном электроприводе применяют два основных метода частотного управления:
- скалярное управление;
- векторное управление.
Асинхронный электропривод со скалярным управлением является на сегодняшний день наиболее распространенным. Он применяется в составе приводов насосов, вентиляторов, компрессоров и других механизмов, для которых важно поддерживать либо скорость вращения вала двигателя (при этом используется датчик скорости), либо технологический параметр (например, давление в трубопроводе, при этом используется соответствующий датчик).
Основной принцип скалярного управления — изменение частоты и амплитуды питающего напряжения по закону U/fn = const, где n≥1. Конкретный вид зависимости определяется требованиями, предъявляемыми к электроприводу нагрузкой. Обычно за независимое воздействие принимается частота, а значение напряжения при данной частоте определяет вид механической характеристики, значения пускового и критического моментов. Скалярное управление обеспечивает постоянство перегрузочной способности электропривода независимо от частоты напряжения, однако имеет место снижение развиваемого двигателем момента при низких частотах (при f<0,1fном). Максимальный диапазон регулирования скорости вращения ротора при неизменном моменте сопротивления для электроприводов со скалярным управлением достигает 1:10.
Метод скалярного управления относительно прост в реализации, но обладает двумя существенными недостатками. Во-первых, при отсутствии датчика скорости на валу двигателя невозможно регулировать скорость вращения вала, так как она зависит от нагрузки. Наличие датчика скорости решает эту проблему, однако остается второй существенный недостаток — нельзя регулировать момент на валу двигателя. С одной стороны, и эту проблему можно решить установкой датчика момента, однако такие датчики имеют очень высокую стоимость, зачастую превышающую стоимость всего электропривода. Но даже при наличии датчика управление моментом получается очень инерционным. Более того, при скалярном управлении нельзя регулировать одновременно и момент и скорость, поэтому приходится выбирать ту величину, которая является наиболее важной для данного технологического процесса.
Для устранения недостатков, присущих скалярному управлению, фирмой SIEMENS еще в 1971 году был предложен метод векторного управления. Первые варианты электроприводов с векторным управлением требовали использования двигателей со встроенными датчиками потока. Это существенно ограничивало применение таких приводов.
В современных электроприводах в систему управления закладывается математическая модель двигателя, которая позволяет рассчитывать момент на валу и скорость вращения вала. При этом необходимыми являются только датчики тока фаз статора двигателя. Благодаря специальной структуре системы управления обеспечивается независимое и практически безынерционное регулирование двух основных параметров — момента на валу и скорости вращения.
На сегодняшний день сформировалось два основных класса систем векторного управления — бездатчиковые системы (без датчика скорости на валу двигателя) и системы с обратной связью по скорости. Применение того или иного метода векторного управления определяется областью применения электропривода. При небольших диапазонах изменения скорости (не более 1:100) и требованиях к точности ее поддержания не более ±0,5% применяют бездатчиковое векторное управление. Если же скорость вращения вала изменяется в широких пределах (до 1:10000 и более), имеются требования к высокой точности поддержания скорости вращения (до ±0,02% при частотах вращения менее 1 Гц) или есть необходимость позиционирования вала, а также при необходимости регулирования момента на валу двигателя на очень низких частотах вращения, применяют методы векторного управления с обратной связью по скорости.
При использовании векторного управления достигаются следующие преимущества: высокая точность регулирования скорости даже при отсутствии датчика скорости; плавное, без рывков, вращение двигателя в области малых частот; возможность обеспечения номинального момента на валу при нулевой скорости (при наличии датчика скорости); быстрая реакция на изменение нагрузки: при резких скачках нагрузки практически не происходит скачков скорости; обеспечение такого режима работы двигателя, при котором снижаются потери на нагрев и намагничивание, а следовательно, повышается КПД двигателя.
Наряду с очевидными преимуществами, методу векторного управления присущи и некоторые недостатки, такие, как большая вычислительная сложность и необходимость знания параметров двигателя. Кроме того, при векторном управлении колебания скорости на постоянной нагрузке больше, чем при скалярном управлении. Следует отметить, что существуют области, в которых возможно использование только скалярного управления, например в групповом электроприводе, где от одного преобразователя питаются несколько двигателей.
Потери энергии в частотном преобразователе и способы их снижения
Рассмотрим вопрос тепловыделения в инверторной части преобразователя. Чем определяются потери транзистора?
Рис.8. Потери энергии
Возьмем условный IGBT-транзистор, который включен в цепь с напряжением 500 вольт, ограничивающий резистор.
Закрытое состояние: на затворе напряжения нет, напряжение на коллекторе равно сетевому напряжению, ток отсутствует, утечки мизерные, тепловыделения никакого нет. Открываем транзистор с помощью напряжения 10 вольт на затворе, это стандартное напряжение практически для всех транзисторных модулей. Транзистор переключается в открытое состояние не мгновенно, у каждого транзистора есть параметр, который называется время включения или время выключения. Типичное значение для самых распространенных транзисторов — 0,2 микросекунды. Время небольшое, но за это время на кристалле транзистора присутствует как напряжение, которое быстро спадает, так и нарастающее значение тока, которое тоже нарастает не мгновенно. В этот момент происходят потери. И чем выше частота ШИМ, про которую мы раньше говорили, чем чаще включается и выключается транзистор, тем больше идет тепловыделения за счет потерь переключений.
Когда транзистор открылся, установился статический режим на какое-то небольшое время, тепловыделение продолжается: оно происходит за счет того, что в момент состояния открытия, напряжение на транзисторе тоже не равно нулю, он определяется потерями на кристалле в открытом состоянии. Типичное его значение 1,5 вольта. Оно может незначительно варьироваться в зависимости от технологии изготовления транзистора и пр.
В этот момент тепловыделение тоже существует, но с потерями в открытом состоянии мы ничего не можем сделать, максимум — применить транзисторы с меньшим напряжением в открытом состоянии. С потерями при переключении мы можем бороться путем уменьшения частоты ШИМ. Это бывает полезно, если преобразователь находится в закрытом шкафу, где он греется больше. Понизив частоту ШИМ, мы можем снизить потери на преобразователе и снизить его температуру.
Общие потери преобразователя частоты в виде тепла составляют около 3%.
Потери на выпрямителе происходят через открытые диоды. Падение напряжения на открытом диоде, а также протекающий через него выпрямленный ток приводят к его нагреву. Звено постоянного тока, состоящее из электролитических конденсаторов большой емкости, тоже нагревается, потому что постоянно происходит процесс заряда и разряда. Также к потерям можно отнести собственные нужды преобразователя частоты: работу вентиляторов охлаждения, электронной схемы, вторичного источника питания и так далее.
Как выбрать частотник
Существует несколько критериев, по которым выбирают аппарат.
По мощности
Мощность преобразователя (P) должна быть немного больше, чем электрическая мощность двигателя, которым он будет управлять. Электрическая мощность, которую двигатель будет потреблять, равна произведению значений напряжения и тока (В*А). Частотник подбирают с 15-20% запасом мощности.
Шильдик на электродвигателе
Напряжение в сети
От того, какое напряжение будет являться питающим (380 В или 220 В), зависит выбор регулятора. Величина Uпит указана в техпаспорте прибора.
Частотная регулировка
Интервал регулировки частот преобразователя, заявленный производителем, должен позволять регулировать вращение вала присоединяемого электромотора в спектре его скоростных характеристик.
Дискретные входы
Наличие входов обязательно. Они нужны для подачи (ввода) команд. С их помощью можно изменять параметры преобразователя и его состояние.
Дискретные входы
Соотношение цены и количества выводов
Подобрать частотник по цене можно, руководствуясь количеством функциональных выводов. От их количества зависит не только стоимость, но и удобство подключения, управления, настройки и регулировки.
Схема выводов инвертора Delta VFD-B
Перегрузки и ШУ
Шина управления (ШУ) подбирается под конкретный инвертор. Хорошим вариантом при приобретении будет ШУ, которая имеет достаточный запас колодок (разъёмов) для подключения. Это позволит в дальнейшем подключать к аппарату дополнительную аппаратуру, устройства защиты от перегрузок. Учесть все необходимые качества поможет сборка частотного преобразователя своими руками.
3.1. Выбор элементной базы
Особых требований к надежности, точности и быстродействию схемы не предъявляется, поэтому единственным критерием подбора элементов является обеспечение заданных параметров работы устройства. В соответствии с этим была выбрана следующая элементная база:
— Одновибратор на основе микросхемы К156АГ1
— Интегратор на основе микросхемы К140УД20
— Стабилитрон КC210Б2
— Конденсаторы с отрицательным TKE
— Pезисторы с положительным TKE