Принцип действия.
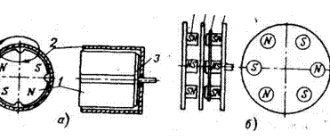
Работа данного двигателя напрямую зависит от взаимодействия магнитных полей статора и коллектора. Как мы с вами уже знаем, что в статоре и на коллекторе есть обмотки. Если подать на эти обмотки напряжение, то за счёт этого будут создаться магнитные поля. А эти магнитные поля уже и будут заставлять коллектор вращаться. Смотрите, как это показано на картинке.
Достоинства и недостатки.
Основные достоинства ДПТ:
1. Простое устройство двигателя.
2. Можно очень легко изменять частоту вращения вала.
3.За счет сильного момента очень хорошие пусковые характеристики.
4. Можно использовать как в качестве двигателя, так же и в качестве генератора.
5. По сравнению с некоторыми другими двигателями, имеет не большие размеры.
Недостатки:
1. Очень высокая цена.
2. Если подключать двигатель к переменной сети, то так же нужны выпрямительные устройства.
3. Очень часто приходится обслуживать коллекторно-щёточный узел.
4. Коллектор имеет ограниченный срок службы из-за износа.
§36. Регулирование частоты вращения якоря электродвигателя
Из формулы (65) следует, что частота вращения якоря электродвигателя постоянного тока зависит от падения напряжения Iя?Rя в цепи обмотки якоря, питающего напряжения U и магнитного потока Ф. Поэтому ее можно регулировать тремя способами:
включением реостата с сопротивлением Rп в цепь обмотки якоря;
изменением питающего напряжения U;
изменением магнитного потока Ф.
Рассмотрим более подробно эти способы на примере двигателей с последовательным и параллельным возбуждением.
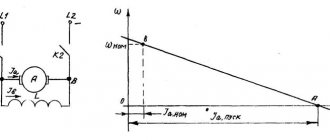
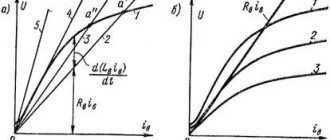
Включение реостата в цепь обмотки якоря. При включении реостата с сопротивлением Rп в цепь обмотки якоря, кроме естественной механической характеристики 1, получают и ряд реостатных характеристик 2, 3 и 4 (рис. 133). При этом заданному нагрузочному моменту Мвн соответствуют различные значения частоты вращения n1, n2, n3 и n4; чем больше сопротивление Rп тем меньше частота вращения якоря двигателя. Такой способ регулирования весьма прост и позволяет осуществлять плавное регулирование частоты вращения в широком диапазоне. (Однако при этом возникают большие потери энергии в регулирующем реостате, вследствие чего его практически применяют только при кратковременных режимах работы двигателя (например, при пуске). Другим недостатком рассматриваемого способа регулирования является то, что частоту вращения п можно только уменьшать от n1 до нуля.
Изменение питающего напряжения. При изменении питающего напряжения частота вращения п изменяется пропорционально U. Следовательно, подавая на обмотку якоря различные напряжения U1, U2, U3, можно получить семейство механических характе-
Рис. 133. Механические характеристики электродвигателей с последовательным (а) и независимым или параллельным (б) возбуждением при регулировании частоты вращения включением реостата в цепь обмотки якоря
Рис. 134. Механические характеристики электродвигателя с последовательным (а) и независимым (б) возбуждением при регулировании частоты вращения путем изменения питающего напряжения
Рис. 135. Схемы питания электродвигателя с последовательным возбуждением от генератора (а) и выпрямителя (б)
ристик 1, 2 и 3, у которых при любой нагрузке n1:n2:n3 = U1:U2:U3 (рис. 134). При уменьшении питающего напряжения механические характеристики двигателя смещаются в область меньших частот вращения и располагаются параллельно. Для осуществления указанного способа регулирования частоты вращения двигатель должен быть подключен к источнику постоянного тока с регулируемым напряжением: к генератору Т с независимым возбуждением (рис. 135, а) или выпрямителю Вn (рис. 135,б). Питание тяговых двигателей от генератора осуществляется на тепловозах, а от выпрямителя — на электровозах и электропоездах переменного тока. На электровозах и электропоездах выпрямитель подключают к трансформатору, позволяющему изменять напряжение, подаваемое на вход выпрямителя, а следовательно, и его выходное напряжение U. На тепловозах в цепях управления имеется специальная электрическая аппаратура, позволяющая изменять ток возбуждения генератора, т. е. его выходное напряжение U, ручным способом или автоматически.
Несмотря на то, что рассмотренный способ требует довольно сложного оборудования, его широко применяют на современных локомотивах и электропоездах, так как он обеспечивает плавное и экономичное (без потерь энергии в реостатах) регулирование частоты вращения в очень широких пределах. Следует отметить, что для электродвигателей с параллельным возбуждением указанный способ регулирования применять нельзя, так как при уменьшении питающего напряжения соответственно уменьшался бы магнитный поток двигателя и увеличивался ток обмотки якоря. В этом случае двигатель должен быть переведен на независимое возбуждение.
На э. п. с. постоянного тока напряжение, подводимое от контактной сети к электровозу или моторному вагону, не может регулироваться, поэтому здесь для изменения подаваемого к двигателям напряжения применяют последовательно-параллельное переключение тяговых двигателей. При этом изменяется напряжение, приходящееся на каждый двигатель локомотива, и частота вращения.
При регулировании частоты вращения двигателей путем их последовательно-параллельного переключения число возможных схем соединений зависит от числа двигателей, установленных на данном локомотиве. Например, на четырехосных электровозах может быть использовано последовательное соединение тяговых двигателей (рис. 136, а); при этом напряжение, подводимое к двигателю, в 4 раза меньше напряжения U в контактной сети и двигатель имеет некоторую минимальную частоту вращения nmin при заданном моменте Мвн. При соединении двигателей в две параллельные группы (рис. 136, б), в каждую из которых включено по два последовательно соединенных двигателя, напряжение, подводимое к каждому двигателю, будет в 2 раза меньше напряжения U в контактной сети и частота его вращения будет составлять 2nmin. Характеристики двигателей при этом располагаются одна над другой (рис. 136, в).
Последовательно-параллельное переключение тяговых двигателей применяют также на тепловозах. Это позволяет ограничить диапазон регулирования напряжения генератора, от которого зависят его габаритные размеры и масса.
Изменение магнитного потока. Для того чтобы изменить магнитный поток Ф, регулируют ток возбуждения двигателя с помощью
Рис. 136. Схемы соединения тяговых двигателей на четырехосных электровозах или электропоездах (а и б) и механические характеристики двигателей при различных схемах соединения (в): 1 — последовательное соединение; 2— последовательно-параллельное соединение
Рис. 137. Схема включения регулировочного реостата параллельно обмотке возбуждения в двигателе с последовательным возбуждением (а) и механические характеристики (б) при различных сопротивлениях реостата
регулировочного реостата Rрв (рис. 137, а). В двигателях с после-довательньм возбуждением регулировочный реостат включают параллельно обмотке возбуждения, вследствие чего через обмотку возбуждения будет протекать только часть тока якоря (другая часть ответвляется в точке О в реостат Rрв). Обычно регулировочный реостат имеет несколько ступеней с сопротивлениями R1, R2, R3, которые позволяют получать несколько ступеней регулирования тока возбуждения двигателя.
Включение ступеней R1, R2, R3 осуществляется контакторами 1, 2 и 3; при этом механические характеристики двигателя 2 (при включении ступени R1), 3 (при включении R1 и R2 и 4 (при включении R1, R2 и R3) располагаются выше естественной характеристики 1 (рис. 137,б).
Степень регулирования тока возбуждения характеризуется коэффициентом регулирования возбуждения ?, который представляет собой отношение тока возбуждения Iв0 при ослабленном возбуждении (включен регулировочный реостат Rрв) к току возбуждения Iвн при нормальном возбуждении при одном и том же токе в обмотке якоря:
? = Iв0/Iвн = Rвн/(Rв+Rвн)
где Rв — сопротивление обмотки возбуждения.
Рассмотренный способ регулирования прост и экономичен, поэтому его широко применяют на локомотивах и электропоездах. Однако в этом случае регулирование частоты вращения можно осуществлять только в сравнительно небольшом диапазоне. Нижний предел nmin ограничивается насыщением магнитной цепи машины, которое не позволяет увеличивать в значительной степени магнитный поток, верхний предел nmax—условиями устойчивости (при сильном уменьшении Ф двигатель идет вразнос), а также тем, что при глубоком ослаблении возбуждения сильно увеличивается ток якоря Iя, что приводит к возрастанию реактивной э. д. с. и искажающего действия реакции якоря. При этом повышается опасность возникновения искрения на коллекторе и появления кругового огня. По этой причине двигатели, предназначенные для работы в режимах глубокого ослабления возбуждения, обязательно должны иметь компенсационную обмотку и пониженное значение реактивной э. д. с. при номинальном режиме. Обычно предельное значение коэффициента возбуждения ? для двигателей без компенсационной обмотки составляет 0,3—0,33, а при наличии компенсационной обмотки — 0,2.
В двигателях с независимым и параллельным возбуждением регулировочный реостат, посредством которого изменяют ток возбуждения Iв и магнитный поток Ф, включают последовательно с обмоткой возбуждения (см. рис. 125). В этом случае при изменении тока возбуждения частота вращения n0 при холостом ходе будет изменяться, т. е. механическая характеристика 2 при ослабленном возбуждении будет располагаться выше характеристики 1 при нормальном возбуждении (рис. 138). Однако характеристики 1 и 2 при различных значениях Ф не будут параллельны, так как согласно формуле (65) изменяется снижение частоты вращения, обусловленное падением напряжения Iя?Rя в цепи обмотки якоря.
Работа электродвигателя с ослабленным возбуждением при переходных процессах. При включении регулировочного реостата параллельно обмотке возбуждения (см. рис. 137, а) приходится применять специальные меры для сохранения требуемого распределения тока между нею и реостатом при переходных процессах, возникающих в случаях резкого изменения режима работы двигателя, изменения напряжения в контактной сети и пр.
При переходных процессах, когда токи Iя, Iв и Iрв изменяются, в обмотке возбуждения возникает значительная э. д. с. самоиндукции еL. В результате ее действия ток Iв уменьшается по сравнению с его значением при стационарном режиме, а ток Iрв возрастает, т. е. происходит значительно большее ослабление возбуждения. Наиболее опасным переходным процессом для тяговых двигателей, работающих с ослабленным возбуждением, является включение их на полное напряжение после кратковременного отключения от
Рис. 138. Механические характеристики электродвигателя с независимым и параллельным возбуждением при регулировании частоты вращения путем изменения магнитного потока
Рис. 139. Направление электромагнитного момента М при различном направлении тока в обмотке якоря и различной полярности полюсов
Рис. 140. Схемы переключений обмотки электродвигателя с последовательным возбуждением при изменении направления вращения
сети (при отрыве токоприемника от контактного провода). В этом случае из-за большой э. д. с. самоиндукции еL в первый момент после включения почти весь ток Iя пойдет по регулировочному реостату Rрв, а ток Iв в обмотке возбуждения будет мал. Это приведет к значительному возрастанию тока Iя в обмотке якоря из-за уменьшения э. д. с. Е, индуцированной в ней. Практически при этих условиях возникает резкий бросок тока Iя, сопровождающийся нарушением нормальной коммутации (искрением под щетками) и образованием кругового огня. Кроме того, из-за большой скорости изменения тока создаются большие коммутационные перенапряжения, которые могут вызвать пробой изоляции обмоток якоря и возбуждения.
Бросок тока Iя при включении двигателя под напряжение и скорость его изменения зависят от распределения токов Iв и Iрв между обмоткой возбуждения и регулировочным реостатом Rрв. Чтобы обеспечить при переходных процессах такое же распределение токов Iв и Iрв, как и при стационарном режиме, последовательно с реостатом Rрв включают индуктивный шунт ИШ, представляющий собой катушку с ферромагнитным сердечником. Индуктивность этой катушки подбирают так, чтобы отношение индуктивностей обмотки возбуждения и цепи реостата Rрв было приблизительно равно отношению их сопротивлений. При этом условии возникающие при переходных процессах э. д. с. самоиндукции eL в обмотке возбуждения и eL1 в индуктивном шунте не будут влиять на распределение токов Iв и Iрв и возрастание тока Iя будет небольшим.
Изменение направления вращения. Чтобы изменить направление вращения двигателя, необходимо изменить направление электромагнитного момента М, действующего на якорь. Направление момента М определяется правилом левой руки (см. рис. 68,б). Изменить направление М можно двумя способами (рис. 139, а — в): 1) изменением направления тока Iя в обмотке якоря; 2) изменением полярности полюсов, т. е. направления магнитного потока Ф, путем изменения направления тока возбуждения Iв. Для этого переключают провода, подводящие ток к обмотке якоря или к обмотке возбуждения. Например, если при вращении электродвигателя в направлении Вперед ток Iя проходил от щетки А к щетке Б (рис. 140, а), а ток возбуждения Iв — от зажима В1 к зажиму В2, то для перевода двигателя в направление Назад необходимо переключить цепь обмотки якоря так, чтобы ток Iя проходил от щетки Б к щетке А, оставив неизменным направление тока Iв (рис. 140,б), или, оставив неизменным направление тока Iя от А к Б, переключить цепь возбуждения так, чтобы ток Iв проходил от зажима В2 к зажиму В1 (рис. 140, в).
Применение.
Двигателя постоянного тока широко применяются на различной технике. Такой, как: краны, экскаваторы, с трамваи, электрички, тепловозы, теплоходы и так далее. Ещё, такие двигателя, используют в электроинструменте. На производстве, их можно встретить на станках, где нужно регулировать частоту вращения в очень широком диапазоне.
На этом у меня всё. Статья получилась не очень объёмной, но для общего понятия вполне информативна. Если есть вопросы, то задавайте их в комментариях, жмите на кнопки социальных сетей и подписывайтесь на обновление. Пока.
С уважением Александр!
ШИМ
Наиболее простой метод регулирования скорости вращения двигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM). Суть этого метода заключается в том, что напряжение питания подается на двигатель в виде импульсов. При этом частота следования импульсов остается постоянной, а их длительность может меняться.
ШИМ сигнал характеризуется таким параметром как коэффициент заполнения или Duty cycle. Это величина обратная скважности и равна отношению длительности импульса к его периоду.
D = (t/T) * 100%
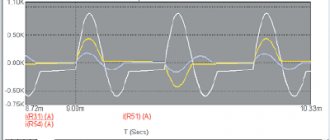
На рисунках ниже изображены ШИМ сигналы с различными коэффициентами заполнения.
При таком методе управления скорость вращения двигателя будет пропорциональна коэффициенту заполнения ШИМ сигнала.
Простейшая схема управления двигателем постоянного тока состоит из полевого транзистора, на затвор которого подается ШИМ сигнал. Транзистор в данной схеме выполняет роль электронного ключа, коммутирующего один из выводов двигателя на землю. Транзистор открывается на момент длительности импульса.
Как будет вести себя двигатель в таком включении? Если частота ШИМ сигнала будет низкой (единицы Гц), то двигатель будет поворачиваться рывками. Это будет особенно заметно при маленьком коэффициенте заполнения ШИМ сигнала. При частоте в сотни Гц мотор будет вращаться непрерывно и его скорость вращения будет изменяться пропорционально коэффициенту заполнения. Грубо говоря, двигатель будет «воспринимать» среднее значение подводимой к нему энергии.
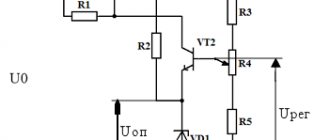
Существует много схем для генерации ШИМ сигнала. Одна из самых простых — это схема на основе 555-го таймера. Она требует минимум компонентов, не нуждается в настройке и собирается за один час.
Напряжение питания схемы VCC может быть в диапазоне 5 — 16 Вольт. В качестве диодов VD1 — VD3 можно взять практически любые диоды. Если интересно разобраться, как работает эта схема, нужно обратиться к блок схеме 555-го таймера. Таймер состоит из делителя напряжения, двух компараторов, триггера, ключа с открытым коллектором и выходного буфера.
Вывод питания (VCC) и сброса (Reset) у нас заведены на плюс питания, допустим, +5 В, а земляной (GND) на минус. Открытый коллектор транзистора (вывод DISCH) подтянут к плюсу питания через резистор и с него снимается ШИМ сигнал. Вывод CONT не используется, к нему подключен конденсатор. Выводы компараторов THRES и TRIG объединены и подключены к RC цепочке, состоящей из переменного резистора, двух диодов и конденсатора. Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую. В момент включения питания на выводе OUT низкий логический уровень, тогда на выводах THRES и TRIG, благодаря диоду VD2, тоже будет низкий уровень. Верхний компаратор переключит выход в ноль, а нижний в единицу. На выходе триггера установится нулевой уровень (потому что у него инвертор на выходе), транзисторный ключ закроется, а на выводе OUT установиться высокий уровень (потому что у него на инвертор на входе). Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться. Приблизительную частоту ШИМ сигнала, формируемого этой схемой, можно рассчитать по следующей формуле:
F = 1.44/(R1*C1), [Гц]
где R1 в омах, C1 в фарадах. При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 288 Гц.
Объединим две представленные выше схемы, и мы получим простую схему регулятора оборотов двигателя постоянного тока, которую можно применить для управления оборотами двигателя игрушки, робота, микродрели и т.д.
VT1 — полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1. Вместо полевого транзистора можно использовать биполярный n-p-n транзистор, транзистор дарлингтона, оптореле соответствующей мощности.