Тиристорные преобразователи позволяют подавать на двигатель импульсы электрического тока различной конфигурации. Характеристики и пропускная способность меняются в зависимости от спецификаций системы и самого устройства.
В последнее время промышленные системы, приводимые в движение электричеством, все чаще включают в себя тиристорный преобразователь для двигателя постоянного тока. Эти полупроводниковые вентили позволяют осуществлять управление приводом в значительном диапазоне: сила тока может превышать сотни ампер, а напряжение достигает 1000В и выше.
При своих повышенных технических показателях тиристорный электропривод отличается компактными габаритными размерами. При этом его быстродействие превышает аналогичные показатели у других систем похожего назначения, а диапазон рабочих температур позволяет эксплуатировать двигатель постоянного тока в окружающей среде от -60 до +60 по Цельсию.
Что такое тиристор
Тиристорная система – это частично управляемая система преобразования напряжения. Общая схема работы предполагает активацию привода в момент подачи потенциала необходимого уровня на управляющий электрод. Чтобы отключить тиристорный преобразователь двигателя постоянного тока, необходимо выполнить принудительный разрыв цепи. Это можно осуществить тремя способами:
- подать гасящее напряжение, имеющее значение, противоположное пусковому импульсу;
- отключить энергоснабжение всего привода;
- провести ток питания через ноль.
Скорость вращения электродвигателя зависит от среднего значения напряжения, уже прошедшего через выпрямитель. Тиристорный электропривод позволяет управлять моментом подачи основного потока выпрямленного напряжения и его задержкой. Регулируя момент подачи, можно осуществлять общее управление двигателем постоянного тока.
Система тиристорный преобразователь – двигатель (ТП – Д)
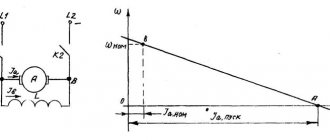
В системе ТП – Д двигатель постоянного тока независимого возбуждения питается от тиристороного преобразователя. Принципиальная схема системы изображена на рис.
Среднее значение выпрямленного напряжения ТП.
, где
U2 – действующее значение фазного напряжение вторичной обмотки питающего трансформатора (или сети в бестрансформаторных схемах).
m – число пульсаций выпрямленного напряжения;
a — угол задержки открывания тиристоров;
Ud0 – максимальное значение среднего выпрямленного напряжения при a=0.
Кривые выпрямленного напряжения с учетом явления коммутации вентилей, характеризуемой углам g, изображены на рис
Зависимость ЭДС ТП от напряжения управления Uу при линейной характеристике СИФУ представлена на следующем рисунке. При ее замене линеаризованной ТП как динамическое звено системы электропривода в режиме непрерывного тока описывается уравнением , где — коэффициент усиления ТП по напряжению; — малая постоянная времени ТП, учитывающая дискретность, запаздывание и наличие фильтров в СИФУ.
Уравнение электрического равновесия в якорной цепи системы ТП-Д
, где
Здесь Rя – сопротивления якорной цепи двигателя;
— индуктивное сопротивление фазы трансформатора, обусловленное полями рассеяния, а х2 и х1 – индуктивные сопротивления рассеяния вторичной и первичной обмоток трансформатора;
Rдр – сопротивление сглаживающего дросселя;
Rтр – активное сопротивление обмоток фазы трансформатора, приведенное к вторичной цепи;
Rср.в – усредненное сопротивление вентилей
Имея в виду, что ; ; , получим уравнение механической характеристики двигателя для любого режима работы
или
Т.к. , где , то
Отсюда следует, что в режиме непрерывного тока механические характеристики двигателя в системе ТП-Д при принятых допущениях аналогичны характеристикам системы ГД.
При , получим уравнение статических характеристик
или
Уравнения статических механических и электромеханических характеристик двигателя для режима непрерывных токов можно представить и в следующем виде:
Семейство статических механических характеристик при различных a, изображено на рис. Это прямые, отсекающие на оси ординат отрезки, соответствующие скорости идеального холостого хода
Однако в действительности при раздельном управлении комплектами вентилей (в случае двух комплектного преобразователя) или при питании от однокомплектного ТП в области малых нагрузок ток становится прерывистым, причем при Uy=0 и среднее значение Ud становится . Появляется зона прерывистых токов, она тем больше, чем больше угол a.
Появление зоны прерывистого токов обусловлено тем, что в определенные промежутки времени мгновенное значение выпрямленного напряжения преобразователя становится меньше встречно действующей ЭДС двигателя, что видно из графика выпрямленного напряжения, и, как следует из уравнения равновесия ЭДС, разность Ud-e становится отрицательной. Ток должен изменить направление на противоположное. Но поскольку вентили обладают односторонней проводимостью, ток становится равным нулю. Вентили закрываются ток появляется вновь когда Ud станет больше е. При больших нагрузках несмотря на то, что в определенные промежутки времени мгновенное значение Ud становится меньше ЭДС двигателя, ток не прерывается, является непрерывным. Объясняется это тем, что при больших нагрузках запас электромагнитной энергии в цепи выпрямленного тока значительный. Возникающая при исчезновении тока ЭДС самоиндукции складывается с мгновенным выпрямленным напряжением ТП и в сумме они превышают ЭДС двигателя. Поэтому разность между этой суммой и ЭДС двигателя положительна и ток не прерывается. При малых нагрузках ЭДС самоиндукции оказывается недостаточной для поддержания тока и он прерывается.
Переходу от режима непрерывного тока к прерывистому соответствует режим начально-непрерывного тока, являющегося граничным между двумя указанными. Величина граничного тока зависит от угла a и параметров схемы , где
Граничные токи (моменты) лежат на дуге эллипса, смещенного по оси ординат на величину (см. рис. с механическими характеристиками).
Отметим, что если двигатель питается от нереверсивного ТП, то система электропривода становится неполноуправляемой, ибо ток может протекать только в одном направлении. Соответственно этому механические характеристики во втором и третьем квадранте не существуют.
При наличии зоны прерывистых токов электромеханические и механические характеристики в этой зоне не выражаются аналитически. Они напоминают механические характеристики двигателя последовательного возбуждения, как показано на рис.. При уменьшении нагрузки скорость двигателя возрастает и увеличивается его ЭДС, являющаяся противодействующей, что вызывает уменьшение тока нагрузки преобразователя. Это приводит к уменьшению падения напряжения на внутренних сопротивлениях схемы, а также к уменьшению потерь среднего напряжения, обусловленного явлением коммутации. В связи с этим Ud возрастает. При идеальном холостом ходе двигателя исчезают падения напряжения на вентилях и внутренних сопротивлениях схемы и Ud повышается еще больше. Напряжение на двигателе (за время импульса тока) приближается к амплитуде питающего преобразователь напряжения переменного тока и скорость двигателя растет. Поэтому в зоне малых и нулевых нагрузок механические характеристики двигателя имеют мягкий характер, что и показано на графике. Скорость идеального холостого хода двигателя для этих характеристик могут быть определены из выражений:
при и
при
Здесь Е2ф.м – амплитуда фазной ЭДС вторичной обмотки питающего трансформатора или амплитуда фазного напряжения питающей сети (в бестрансформаторных схемах ).
DUВ – падение напряжения в вентилях.
Используя уравнение динамики ТП, уравнение равновесия ЭДС в якорной цепи, уравнение механической характеристики двигателя в системе ТП-Д и уравнение движения электропривода при жестких механических связях, можно изобразить структурную схему системы ТП – Д, которая имеет вид .
При представлении уравнения в виде
, где
Структурная схема примет вид.
Двигатель в системе ТП – Д может работать во всех режимах. Двигательному режиму соответствует область в 1 и 3 квадратах, режиму динамического торможения соответствует характеристика, проходящая через начало координат при . Режиму противовключения соответствует область, заключенная между осью моментов и характеристикой динамического торможения. Режиму рекуперации соответствует область между осью ординат во 2 и 4 квадратах и характеристикой динамического торможения.
Торможение и реверсирование двигателя в системе ТП-Д и статические механические характеристики реверсивного вентильного электропривода
Реверс двигателя заключается в торможении до остановки и разгоне в противоположную сторону. В системе ТП-Д его можно осуществить:
а) изменением полярности питания двигателя при помощи реверсирующих контакторов или реверсирующих тиристоров по следующей схеме. Этот способ целесообразен в том случае, если время реверса не имеет существенного значения. Продолжительность реверса не менее 0,1 сек.
б) изменением направления магнитного потока двигателя при неизменном направлении тока якоря, что осуществимо при помощи реверсирующих контакторов в цепи возбуждения, как показано на следующей схеме. Однако продолжительность реверса в этом случае имеет порядок 0,5-2,5 с.
в) Для электроприводов, где требуется максимальное быстродействие при реверсе, а также необходимость как двигательного, так и тормозного режимов при одном направлении вращения применяются ТП с двумя комплектами вентилей, каждый из которых служит для питания двигателя при одном направлении вращения, благодаря чему создается эффект двухсторонней проводимости преобразователя.
Как уже сказано выше, реверс заключается в торможении двигателя и разгоне его в противоположном направлении. Основным способом торможения в системе ТП – Д является торможение с рекуперацией энергии в сеть. В отличие от системы ГД этот режим не может быть получен только путем увеличения скорости сверх скорости идеального холостого хода. Хотя при w>w0 ЭДС двигателя станет больше Ud , ток в якорной цепи прервется, т.к. ЭДС двигателя будет приложена к вентилям преобразователя в направлении, противоположном их проводимости, и вентили закроются. Для рекуперации энергии в сеть необходимо преобразовать энергию постоянного тока, источником которой при w>w0 становится двигатель, в энергию переменного тока. Для этого ТП нужно перевести в инверторный режим. Практически для возможности торможения электропривода с рекуперацией энергии в сеть применяют два комплекта вентилей, включенных по мостовой схеме, как изображено на рис. и объединяют их управляющее устройство в один орган управления.
В выпрямительном режиме преобразователя активная составляющая Ia1 первой гармоники фазного тока совпадает по направлению с напряжением (ЭДС) фазы, а реактивная Ip1 – отстает на 90°. Следовательно, преобразователь потребляет из сети активную и реактивную мощность. Если j1 станет больше 90°, что при g=0 соответствует a>90°, то Ip1 , будет по прежнему отставать от Еф на 90°, а Ia1 будет направлен встречно с ЭДС фазы . В этом случае преобразователь будет отдавать в сеть активную мощность при одновременном потреблении реактивной мощности. Этот режим и является инверторным . В нем источником тока является ЭДС машины постоянного тока, которая превышает напряжение преобразователя.
Т.о. для получения инверторного режима работы ТП необходимо, чтобы a был больше 90°, т.е. необходимо заставить преобразователь путем увеличения угла a принудительно выпрямлять отрицательные полуволны питающего напряжения сети. Сам он не будет это делать, поэтому инверторный режим может иметь место только при принудительной коммутации. При этом изменится знак напряжения Ud.
Известно, что в цепи постоянного тока изменение направления передачи энергии обычно связано с реверсом тока. Но такой же эффект имеет место и при изменении знака напряжения, что видно из соотношения p=ui .
Т.к. вентили обладают односторонней проводимостью, то для изменения направления потока мощности при неизменном направлении тока нужно изменить знак напряжения, т.е. необходимо заставить преобразователь принудительно выпрямлять отрицательные полуволны питающего напряжения, что и делается для осуществления рекуперативного торможения двигателя.
Переход преобразователя из выпрямительного в инверторный режим можно проиллюстрировать с помощью временных диаграмм (без учета угла коммутации g).
При переходе в инверторный режим напряжение сети переменного тока и постоянного тока меняются ролями так, что вентили этого не замечают. Полярность напряжения на зажимах преобразователя и направление тока через вентили остаются неизменными. Выпрямитель, переходя в инверторный режим, продолжает выпрямлять напряжение сети переменного тока, но только его отрицательные полуволны. Угол управления в этом режиме отсчитывается влево от точки пересечения синусоид напряжения питающей сети в отрицательной области и называется , как известно, углом опережения b. Он равен b=p-a. Вместо угла коммутации g для инверторного режима принято использовать понятие угла запирания d=b-g или, иначе, угла запаса
В инверторном режиме ТП возникают те же падения напряжения , что и в выпрямительном режиме преобразователя. Однако они покрываются не за счет сети, а за счет источника постоянного тока т.е. двигателя. Поэтому заменяя в выражениях электромеханической и механической характеристик a на b и учитывая, что ток в якорной цепи при инверторном режиме преобразователя, следовательно, тормозном режиме двигателя , определяется разностью ЭДС двигателя и Ud преобразователя, действующего встречно относительно ЭДС двигателя и имеет противоположное направление по сравнению с током в двигательном режиме, уравнения электромеханической и механической характеристик двигателя в режиме рекуперативного торможения имеют вид:
Семейство механических характеристик, соответствующих различным углам b при питании двигателя от однокомплектного ТП, представлено на сле дующем рисунке. При малых нагрузках так же как и в двигательном режиме, имеют место разрывы тока и резкое изменение скорости.
В случае питания двигателя от двухкомплектного ТП при совместном их управлении и линейном согласовании электромеханические и механические характеристики реверсивного вентильного электропривода аналогичны характеристикам системы ГД, что и изображено на следующем рисунке. При совместном управлении комплектами вентилей, но не полном согласовании линейность характеристик нарушается и они выглядят так как изображено на следующем рис.
Электромеханические и механические характеристики реверсивного вентильного электропривода с раздельным управлением комплектами вентилей существенно зависят от способа согласования углов управления. При линейном согласовании в, частности, они имеют вид , показанный на следующем рис.
Для осуществления рекуперативного торможения электропривода с двумя комплектами вентилей необходимо закрыть вентили преобразователя , работающего в выпрямительном режиме, для чего достаточно установить угол и под действием ЭДС двигателя вентили закроются, и ток в якорной цепи станет равным 0. После этого (если управление не совместное ) необходимо подать на вентили второго преобразователя отпирающие импульсы с углом опережения b=bмин, что обеспечивает инверторный режим , при котором в якорной цепи появится ток, обусловленный разностью Е и Udu, совпадающий по направлению с Е двигателя. Знак электромагнитного момента изменится на противоположный и привод будет работать в тормозном режиме с рекуперацией энергии в сеть. Увеличивая b до 90° (см. характеристики ниже оси моментов) , можно снизить скорость практически до полной остановки привода.
При одном комплекте вентилей и реверсировании с помощью контакторов, для перехода в режим рекуперативного торможения запирают вентили преобразователя, устанавливая угол . Затем посредством реверсирующих контакторов переключают якорную цепь двигателя так, чтобы его ЭДС действовала в направлении прямой проводимости вентилей, и подают на них отпирающие импульсы, обеспечивающие инверторный режим преобразователя и тормозной режим работы двигателя.
В системе ТП – Д двигатель постоянного тока независимого возбуждения питается от тиристороного преобразователя. Принципиальная схема системы изображена на рис.
Среднее значение выпрямленного напряжения ТП.
, где
U2 – действующее значение фазного напряжение вторичной обмотки питающего трансформатора (или сети в бестрансформаторных схемах).
m – число пульсаций выпрямленного напряжения;
a — угол задержки открывания тиристоров;
Ud0 – максимальное значение среднего выпрямленного напряжения при a=0.
Кривые выпрямленного напряжения с учетом явления коммутации вентилей, характеризуемой углам g, изображены на рис
Зависимость ЭДС ТП от напряжения управления Uу при линейной характеристике СИФУ представлена на следующем рисунке. При ее замене линеаризованной ТП как динамическое звено системы электропривода в режиме непрерывного тока описывается уравнением , где — коэффициент усиления ТП по напряжению; — малая постоянная времени ТП, учитывающая дискретность, запаздывание и наличие фильтров в СИФУ.
Уравнение электрического равновесия в якорной цепи системы ТП-Д
, где
Здесь Rя – сопротивления якорной цепи двигателя;
— индуктивное сопротивление фазы трансформатора, обусловленное полями рассеяния, а х2 и х1 – индуктивные сопротивления рассеяния вторичной и первичной обмоток трансформатора;
Rдр – сопротивление сглаживающего дросселя;
Rтр – активное сопротивление обмоток фазы трансформатора, приведенное к вторичной цепи;
Rср.в – усредненное сопротивление вентилей
Имея в виду, что ; ; , получим уравнение механической характеристики двигателя для любого режима работы
или
Т.к. , где , то
Отсюда следует, что в режиме непрерывного тока механические характеристики двигателя в системе ТП-Д при принятых допущениях аналогичны характеристикам системы ГД.
При , получим уравнение статических характеристик
или
Уравнения статических механических и электромеханических характеристик двигателя для режима непрерывных токов можно представить и в следующем виде:
Семейство статических механических характеристик при различных a, изображено на рис. Это прямые, отсекающие на оси ординат отрезки, соответствующие скорости идеального холостого хода
Однако в действительности при раздельном управлении комплектами вентилей (в случае двух комплектного преобразователя) или при питании от однокомплектного ТП в области малых нагрузок ток становится прерывистым, причем при Uy=0 и среднее значение Ud становится . Появляется зона прерывистых токов, она тем больше, чем больше угол a.
Появление зоны прерывистого токов обусловлено тем, что в определенные промежутки времени мгновенное значение выпрямленного напряжения преобразователя становится меньше встречно действующей ЭДС двигателя, что видно из графика выпрямленного напряжения, и, как следует из уравнения равновесия ЭДС, разность Ud-e становится отрицательной. Ток должен изменить направление на противоположное. Но поскольку вентили обладают односторонней проводимостью, ток становится равным нулю. Вентили закрываются ток появляется вновь когда Ud станет больше е. При больших нагрузках несмотря на то, что в определенные промежутки времени мгновенное значение Ud становится меньше ЭДС двигателя, ток не прерывается, является непрерывным. Объясняется это тем, что при больших нагрузках запас электромагнитной энергии в цепи выпрямленного тока значительный. Возникающая при исчезновении тока ЭДС самоиндукции складывается с мгновенным выпрямленным напряжением ТП и в сумме они превышают ЭДС двигателя. Поэтому разность между этой суммой и ЭДС двигателя положительна и ток не прерывается. При малых нагрузках ЭДС самоиндукции оказывается недостаточной для поддержания тока и он прерывается.
Переходу от режима непрерывного тока к прерывистому соответствует режим начально-непрерывного тока, являющегося граничным между двумя указанными. Величина граничного тока зависит от угла a и параметров схемы , где
Граничные токи (моменты) лежат на дуге эллипса, смещенного по оси ординат на величину (см. рис. с механическими характеристиками).
Отметим, что если двигатель питается от нереверсивного ТП, то система электропривода становится неполноуправляемой, ибо ток может протекать только в одном направлении. Соответственно этому механические характеристики во втором и третьем квадранте не существуют.
При наличии зоны прерывистых токов электромеханические и механические характеристики в этой зоне не выражаются аналитически. Они напоминают механические характеристики двигателя последовательного возбуждения, как показано на рис.. При уменьшении нагрузки скорость двигателя возрастает и увеличивается его ЭДС, являющаяся противодействующей, что вызывает уменьшение тока нагрузки преобразователя. Это приводит к уменьшению падения напряжения на внутренних сопротивлениях схемы, а также к уменьшению потерь среднего напряжения, обусловленного явлением коммутации. В связи с этим Ud возрастает. При идеальном холостом ходе двигателя исчезают падения напряжения на вентилях и внутренних сопротивлениях схемы и Ud повышается еще больше. Напряжение на двигателе (за время импульса тока) приближается к амплитуде питающего преобразователь напряжения переменного тока и скорость двигателя растет. Поэтому в зоне малых и нулевых нагрузок механические характеристики двигателя имеют мягкий характер, что и показано на графике. Скорость идеального холостого хода двигателя для этих характеристик могут быть определены из выражений:
при и
при
Здесь Е2ф.м – амплитуда фазной ЭДС вторичной обмотки питающего трансформатора или амплитуда фазного напряжения питающей сети (в бестрансформаторных схемах ).
DUВ – падение напряжения в вентилях.
Используя уравнение динамики ТП, уравнение равновесия ЭДС в якорной цепи, уравнение механической характеристики двигателя в системе ТП-Д и уравнение движения электропривода при жестких механических связях, можно изобразить структурную схему системы ТП – Д, которая имеет вид .
При представлении уравнения в виде
, где
Структурная схема примет вид.
Двигатель в системе ТП – Д может работать во всех режимах. Двигательному режиму соответствует область в 1 и 3 квадратах, режиму динамического торможения соответствует характеристика, проходящая через начало координат при . Режиму противовключения соответствует область, заключенная между осью моментов и характеристикой динамического торможения. Режиму рекуперации соответствует область между осью ординат во 2 и 4 квадратах и характеристикой динамического торможения.
Торможение и реверсирование двигателя в системе ТП-Д и статические механические характеристики реверсивного вентильного электропривода
Реверс двигателя заключается в торможении до остановки и разгоне в противоположную сторону. В системе ТП-Д его можно осуществить:
а) изменением полярности питания двигателя при помощи реверсирующих контакторов или реверсирующих тиристоров по следующей схеме. Этот способ целесообразен в том случае, если время реверса не имеет существенного значения. Продолжительность реверса не менее 0,1 сек.
б) изменением направления магнитного потока двигателя при неизменном направлении тока якоря, что осуществимо при помощи реверсирующих контакторов в цепи возбуждения, как показано на следующей схеме. Однако продолжительность реверса в этом случае имеет порядок 0,5-2,5 с.
в) Для электроприводов, где требуется максимальное быстродействие при реверсе, а также необходимость как двигательного, так и тормозного режимов при одном направлении вращения применяются ТП с двумя комплектами вентилей, каждый из которых служит для питания двигателя при одном направлении вращения, благодаря чему создается эффект двухсторонней проводимости преобразователя.
Как уже сказано выше, реверс заключается в торможении двигателя и разгоне его в противоположном направлении. Основным способом торможения в системе ТП – Д является торможение с рекуперацией энергии в сеть. В отличие от системы ГД этот режим не может быть получен только путем увеличения скорости сверх скорости идеального холостого хода. Хотя при w>w0 ЭДС двигателя станет больше Ud , ток в якорной цепи прервется, т.к. ЭДС двигателя будет приложена к вентилям преобразователя в направлении, противоположном их проводимости, и вентили закроются. Для рекуперации энергии в сеть необходимо преобразовать энергию постоянного тока, источником которой при w>w0 становится двигатель, в энергию переменного тока. Для этого ТП нужно перевести в инверторный режим. Практически для возможности торможения электропривода с рекуперацией энергии в сеть применяют два комплекта вентилей, включенных по мостовой схеме, как изображено на рис. и объединяют их управляющее устройство в один орган управления.
В выпрямительном режиме преобразователя активная составляющая Ia1 первой гармоники фазного тока совпадает по направлению с напряжением (ЭДС) фазы, а реактивная Ip1 – отстает на 90°. Следовательно, преобразователь потребляет из сети активную и реактивную мощность. Если j1 станет больше 90°, что при g=0 соответствует a>90°, то Ip1 , будет по прежнему отставать от Еф на 90°, а Ia1 будет направлен встречно с ЭДС фазы . В этом случае преобразователь будет отдавать в сеть активную мощность при одновременном потреблении реактивной мощности. Этот режим и является инверторным . В нем источником тока является ЭДС машины постоянного тока, которая превышает напряжение преобразователя.
Т.о. для получения инверторного режима работы ТП необходимо, чтобы a был больше 90°, т.е. необходимо заставить преобразователь путем увеличения угла a принудительно выпрямлять отрицательные полуволны питающего напряжения сети. Сам он не будет это делать, поэтому инверторный режим может иметь место только при принудительной коммутации. При этом изменится знак напряжения Ud.
Известно, что в цепи постоянного тока изменение направления передачи энергии обычно связано с реверсом тока. Но такой же эффект имеет место и при изменении знака напряжения, что видно из соотношения p=ui .
Т.к. вентили обладают односторонней проводимостью, то для изменения направления потока мощности при неизменном направлении тока нужно изменить знак напряжения, т.е. необходимо заставить преобразователь принудительно выпрямлять отрицательные полуволны питающего напряжения, что и делается для осуществления рекуперативного торможения двигателя.
Переход преобразователя из выпрямительного в инверторный режим можно проиллюстрировать с помощью временных диаграмм (без учета угла коммутации g).
При переходе в инверторный режим напряжение сети переменного тока и постоянного тока меняются ролями так, что вентили этого не замечают. Полярность напряжения на зажимах преобразователя и направление тока через вентили остаются неизменными. Выпрямитель, переходя в инверторный режим, продолжает выпрямлять напряжение сети переменного тока, но только его отрицательные полуволны. Угол управления в этом режиме отсчитывается влево от точки пересечения синусоид напряжения питающей сети в отрицательной области и называется , как известно, углом опережения b. Он равен b=p-a. Вместо угла коммутации g для инверторного режима принято использовать понятие угла запирания d=b-g или, иначе, угла запаса
В инверторном режиме ТП возникают те же падения напряжения , что и в выпрямительном режиме преобразователя. Однако они покрываются не за счет сети, а за счет источника постоянного тока т.е. двигателя. Поэтому заменяя в выражениях электромеханической и механической характеристик a на b и учитывая, что ток в якорной цепи при инверторном режиме преобразователя, следовательно, тормозном режиме двигателя , определяется разностью ЭДС двигателя и Ud преобразователя, действующего встречно относительно ЭДС двигателя и имеет противоположное направление по сравнению с током в двигательном режиме, уравнения электромеханической и механической характеристик двигателя в режиме рекуперативного торможения имеют вид:
Семейство механических характеристик, соответствующих различным углам b при питании двигателя от однокомплектного ТП, представлено на сле дующем рисунке. При малых нагрузках так же как и в двигательном режиме, имеют место разрывы тока и резкое изменение скорости.
В случае питания двигателя от двухкомплектного ТП при совместном их управлении и линейном согласовании электромеханические и механические характеристики реверсивного вентильного электропривода аналогичны характеристикам системы ГД, что и изображено на следующем рисунке. При совместном управлении комплектами вентилей, но не полном согласовании линейность характеристик нарушается и они выглядят так как изображено на следующем рис.
Электромеханические и механические характеристики реверсивного вентильного электропривода с раздельным управлением комплектами вентилей существенно зависят от способа согласования углов управления. При линейном согласовании в, частности, они имеют вид , показанный на следующем рис.
Для осуществления рекуперативного торможения электропривода с двумя комплектами вентилей необходимо закрыть вентили преобразователя , работающего в выпрямительном режиме, для чего достаточно установить угол и под действием ЭДС двигателя вентили закроются, и ток в якорной цепи станет равным 0. После этого (если управление не совместное ) необходимо подать на вентили второго преобразователя отпирающие импульсы с углом опережения b=bмин, что обеспечивает инверторный режим , при котором в якорной цепи появится ток, обусловленный разностью Е и Udu, совпадающий по направлению с Е двигателя. Знак электромагнитного момента изменится на противоположный и привод будет работать в тормозном режиме с рекуперацией энергии в сеть. Увеличивая b до 90° (см. характеристики ниже оси моментов) , можно снизить скорость практически до полной остановки привода.
При одном комплекте вентилей и реверсировании с помощью контакторов, для перехода в режим рекуперативного торможения запирают вентили преобразователя, устанавливая угол . Затем посредством реверсирующих контакторов переключают якорную цепь двигателя так, чтобы его ЭДС действовала в направлении прямой проводимости вентилей, и подают на них отпирающие импульсы, обеспечивающие инверторный режим преобразователя и тормозной режим работы двигателя.
Общая классификация
Проведя исследование системы, предполагающей наличие тиристора, можно определить наиболее оптимальную схему включения. От выбранного типа запуска непосредственно зависит средний уровень напряжения, выдаваемого выпрямителем при условии отсутствия вмешательства со стороны оператора. В случаях, когда тиристор применяется для двигателя постоянного тока, используются два класса тиристорных преобразователей – мостовые и оснащенные выходом с нулевым значением.
Тиристорный преобразователь мостового типа, как правило, устанавливается в высокомощных системах. Это оптимально в силу того, что каждый такой тиристор может обладать меньшим уровнем напряжения, что позволяет распределить общую нагрузку между несколькими узлами и снизить нагрузку на каждый из них. Кроме того, выпрямленное через мостовой тиристор напряжение не будет иметь постоянную составляющую, что повышает стабильность работы при проходе электрического тока через преобразующие обмотки.
Еще одним отличием между разными классами тиристоров является количество фазовых выходов. Оборудование и приборы, имеющие малый уровень энергопотребления, требуют наличия у тиристора всего нескольких фаз. Если преобразователь спроектирован для работы в высоконагруженных комплексах, его конструкция может включать от 12 до 24 фазовых контактов.
Вне зависимости от выбранного типа активации и общей конструкции данная категория преобразователей напряжения будет иметь все преимущества использования тиристоров. Сюда входит полное отсутствие вращающихся деталей, которые ускоряют процесс износа и требуют периодической замены. Из этого вытекает другое преимущество – низкая инерционность. Главным отличием от простых электромеханических преобразователей электрического тока является компактность, что положительно влияет на совместимость с устройствами, где мало свободного места.
При всех своих преимуществах тиристорный преобразователь имеет ряд недочетов:
- если настройка напряжения проводится в сторону снижения, выходная мощность начинает падать пропорционально уменьшению энергоснабжения;
- при работе преобразователя создаются высшие гармоники, которые сразу попадают в сеть питания всей системы;
- тиристор жестко связан с цепью подачи питания, из-за чего малейший скачок напряжения сразу отзывается в системе. Изменение характеристик подаваемого на двигатель тока создает толчок оси, скачкообразно меняя скорость ее вращения, а это в свою очередь вызывает всплеск тока.
Эксплуатационные показатели электродвигателя, который работает в связке с тиристорным преобразователем, напрямую зависят от уровня напряжения, которое подается на якорь. Также важную роль играет создаваемая приводом нагрузка.
Применение и особенности приводов постоянного тока с тиристорным типом преобразователя.
Электроприводы с тиристорами, в виду своей высокоэффективности в работе, получили широкое распространение в различных производственных отраслях. Основными преимуществами данного электрооборудования являются:
— высокие показатели КПД (до 98%)
— динамичность и быстродействие
— широкий спектр контроля производственным процессом
— стабильность и надежность в работе с большими нагрузками
— сравнительно небольшие габариты
Двигатель, оснащенный управляемым преобразователем, приобретает возможность тонко настраивать и регулировать параметры на различных этапах его работы. Для удобства современные приводы постоянного тока оборудованы высокотехнологичными электронными интерфейсами, работать с ними легко и безопасно.
Новое семейство тиристорных электроприводов от SIEMENS (Германия).
Новая линейка моделей SINAMICS DCM от мирового бренда Siemens, пришедшая на замену серии SIMOREG DC MASTER, воплощает в себе все лучшие технологические наработки в сфере преобразования переменного/постоянного тока. Прежде всего, они разрабатывались для нужд металлургической, нефтедобывающей, деревообрабатывающей, станкостроительной промышленности, и для использования в работе с подъемно-транспортным оборудованием. Широчайший выбор мощностей для управления двигателями, а их особенности коммуникационной системы дают возможности для реализации сетевого управления.
При создании новых тиристорных приводов постоянного тока разработчики постарались максимально сохранить архитектуру и функциональность предыдущего поколения SIMOREG DC Master, тем самым обеспечив необходимую совместимость с предлагаемыми дополнительными элементами и программным обеспечением серии, замена старого оборудования на новое также не создаст никаких дополнительных трудностей.
Отличительные особенности данного модельного ряда приводов постоянного тока:
— универсальное применение благодаря высокой степени адаптивности и гибкости интеграции;
— унифицированная модульная система для дальнейшего внедрения дополнительных элементов к установке;
— расширена вариативность входных и выходных токов, напряжений;
— для программирования работы привода разработаны специальные функциональные блоки, так называемые системы графического проектирования (DCC);
— плата управления имеет отдельный источник питания (24VDC);
— герметизация плат компаундом, силовых шин никелированным покрытием;
— реализована возможность подключения к однофазной сети (только для приводов с током менее 125 А);
— силовая секция полностью изолирована;
— работа в широких температурных пределах окружающей среды;
— удобная панель оператора, позволяющая легко запустить и настроить привод;
— электронное управление параметрами всех настроек, как с рабочей панели, так и помощью компьютера (бесплатное программное обеспечение).
Основные технические характеристики семейства электроприводов SINAMICS DCM:
— огромный выбор рабочих мощностей в диапазоне от 6 до 30 000 000 Вт;
— представлены варианты двух или четырёхквадрантного управления;
— диапазон напряжения питания от 400 В до 830 В;
— номинальный ток от 15 до 3000 А, а при параллельной работе нескольких блоков значения могут быть значительно увеличены;
— представлены два варианта исполнения управляющей электроники: стандартная для открытого и замкнутого контура, а также продвинутая плата с дополнительными возможностями управления приводами и объединения их в сети;
— реверсивный и нереверсивный типы выпрямителей;
— система охлаждения установки воздушная, принудительная;
— оснащены цифровыми инновационными устройствами для удобства эксплуатации, имеется ЖК-панель и специальное программное обеспечение Drive Control Chart;
— типовая или шкафная конструкция.
В каталоге сайта представлены различные варианты исполнения тиристорных приводов для решения любых поставленных перед Вами производственных задач, а наши высококвалифицированные специалисты всегда рады помочь в подборке оборудования под ваш запрос.
Решив купить данный преобразователь, Вы можете быть уверены в надежности исполнения предлагаемого оборудования, так как немецкая компания Siemens уже на протяжении нескольких десятилетий держит неоспоримое лидерство в производстве электроприводного оборудования и гарантирует эталонное качество выпускаемой продукции.
Тиристорные приводы постоянного тока SINAMICS DCM это наилучшее решение для успешной реализации промышленных проектов, его несравненная производственная мощь проверенных временем технологий в сочетании с современными прогрессивными нововведениями, выводят эту серию на высший уровень качества и функциональности.
Типовая конструкция и принцип работы
Тиристором называется полупроводник, изготовленный из кремния. Как правило, он состоит из четырех токопроводящих слоев. Сборка проводится на медном основании, которое имеет шесть граней и хвостовик с нарезанной резьбой. Этот элемент дополняется основной структурой, в производстве которой применяется специальный кремний.
Четырехслойный пропускной комплекс имеет два выхода – управляющий и отрицательный. Снаружи вся конструкция защищена железным корпусом, имеющим форму цилиндра и оснащенным изоляционным слоем. При помощи резьбы тиристор устанавливается в специальное посадочное место и подключается к плюсовому полюсу цепи питания с анодным напряжением.
Управление работой
Общая схема действия заключается в прохождении через тиристор электричества под действием анодного напряжения. При этом величина напряжения на выходе зависит от показателей управляющего тока, который подается на контрольный электрод. Если подача управляющего тока прервана, анодное напряжение, выходящее к потребителю, начнет расти, при этом сохраняя низкую величину.
Когда входящее напряжение нарастает, объем тока, необходимого для открытия тиристора, уменьшается. Между этими показателями наблюдается прямая пропорция, которая прослеживается в любой конструкции тиристорного преобразователя.
Применение закона синуса для управления входящим напряжением также позволяет снизить уровень последнего. При этом управляющий ток снижается пропорционально импульсу, необходимому для открытия основного механизма. Сохранение постоянного управляющего напряжения не приводит к открытию тиристора в случае, когда его уровень ниже, чем у импульса управления.
Наращивание управляющего напряжения приводит к открытию тиристора при определенных условиях. Для этого необходимо обеспечить превышение показателя управляющего импульса. Используя возможность настройки характеристик управляющего импульса, можно менять угол открытия тиристора в диапазоне от нуля до 90 градусов.
В тех случаях, когда необходимо открыть тиристор на больший угол, управляющее напряжение меняется на переменное. В большинстве ситуаций амплитуда тока является синусоидальной. Когда напряжение достигает показателя, равного точке пересечения синусоидой величины управляющего импульса, происходит открытие тиристора.
Путем изменения интервала синуоиды в меньшую или большую сторону, также можно настраивать угол открытия пропускного механизма преобразователя. Данный тип управления работой тиристора называется горизонтальным и реализуется благодаря применению устройства под названием фазосмещатель. Обратный вид контроля – вертикальный – предполагает сдвиг синусоиды вверх либо вниз, что также приводит к изменению угла открытия проводника. Чтобы определить конечную величину, необходимую для воздействия на угол, необходимо выполнить вычисление суммы переменного управляющего напряжения и постоянного тока, формирующего синусоиду. Задать конкретный угол, на который необходимо открыть тиристор, возможно путем настройки постоянного напряжения.
Как только тиристор открыт на нужный угол, система сохраняет заданное положение, пока не будет окончен положительный полупериод. В этот промежуток времени управляющее напряжение не воздействует на функции проводника. Благодаря этой особенности становится возможным использование импульсного управления.
Импульсное управление заключается в подаче периодических волновых воздействий, равных по величине управляющему напряжению и имеющих положительный показатель. Для нормализации работы следует пускать импульсы в четко определенные моменты времени. Такой тип управления позволяет повысить четкость функционирования системы, в составе которой находится тиристорный преобразователь.
Путем изменения угла открытия тиристора можно настраивать форму импульсов, передаваемые на прибор-потребитель. Стоит учитывать, что такое управление приводит к изменению средневзвешенного уровня напряжения на зажимах потребляющего энергию устройства или механизма.
Использование трансформатора
Иногда для обеспечения более точного и стабильного управления работой тиристорных преобразователей используются сторонние узлы, например, трансформаторы. В этом случае первичная обмотка последних будет запитана непосредственно от питающей переменной сети. При этом вторичная обмотка будет включать в себя выпрямитель двухполупериодного типа, который обладает повышенным уровнем индуктивности в цепи, где присутствует постоянное напряжение.
С этим подходом становится возможным устранение эффекта пульсации тока, выпущенного из выпрямителя. Однако таким свойством обладают только двухполупериодные выпрямители, адаптированные под переменное напряжение. Амплитуда выпрямленного тока также должна соответствовать определенным характеристикам: в данном случае ее форма должна быть пилообразной либо прямоугольной. Поэтому выпрямитель также выполняет функцию преобразования формы переменного напряжения.
В процессе работы конденсаторы трансформатора попеременно получают электрический ток сразу двух форм. Прямоугольная амплитуда энергоснабжения наблюдается в заряжающих потоках. Обкладки в свою очередь накапливают пилообразный электрический ток, который впоследствии прикладывается к транзисторным базам. Если присутствует такой тип напряжения, то его классифицируют как опорное.
Каждый установленный в трансформаторе транзистор оснащен собственной базой, которая имеет выделенную цепь. В ней действует напряжение постоянного типа, которое приводит к появлению положительных потенциалов на всех транзисторных базах при условии, что пилообразный ток на обкладках конденсаторов равен нулю. При этом открытие транзисторов производится в момент образования на базе отрицательного потенциала.
Чтобы был запущен вышеописанный процесс, необходимо увеличить отрицательную величину опорного тока настолько, чтобы она превысила значение управляющего напряжения. Это производится в зависимости от текущего уровня последнего для определенного фазового угла. В этом случае время открытия транзистора будет напрямую зависеть от значения управляющего напряжения.
Если один или оба транзистора оказываются открытыми, вторая или третья первичные обмотки трансформаторной установки пропускают через себя импульс прямоугольной формы. В момент прохождения переднего фронта вторичная обмотка формирует объем электрического тока, который выбрасывается непосредственно на электрод тиристора, управляющий его открыванием.
Когда волна напряжения проходит и первичная обмотка задета задним фронтом импульса, во вторичной обмотке образуется такой же ток, но обратной полярности. Затем происходит замыкание этого напряжения на полупроводниковым диодом, который непрерывно проводит шунтирование вторичной обмотки трансформатора. В этом случае тиристорный преобразователь бездействует, так как не получает питание.
Если необходимо реализовать параллельное подключение тиристорного массива к двум трансформаторам, конфигурация схемы меняется. Для этого выполняется генерация двух импульсов с противоположными фазами, сдвиг которых равен 180 градусам.
Тиристорный электропривод монорельсовой дороги
Введение: Тиристорный электропривод используется в системах автоматики и телемеханики не один десяток лет. Простота в обслуживании, низкая себестоимость, продолжительная работа с большими нагрузками, стабилизация скорости независимо от мощности нагрузки. Лёгкое управление позволяет выбрать данное устройство для регулировки скорости электродвигателей при подачи сырья на конвейерах, в насосах, мощных вентиляторах, электросварке, электролебёдках и других устройствах. Тиристорный электропривод предложенный в данной статье, позволяет выполнять все функции указанные ранее при технических данных.
Характеристика электропривода: Напряжение электросети — 220 Вольт. Ток нагрузки максимальный — 100 Ампер. Напряжение нагрузки до 160 Вольт. Частота электросети 50/60 Гц. Диапазон регулирования 1: 10. Возможно питание от трёхфазной электросети при небольших изменениях в схеме.
Блок схема тиристорного электропривода представляет собой: 1) Силовой трансформатор. 2) Электропривод на электродвигателе. 3) Мощный выпрямительный мост с управляющими тиристорами. 4) Низковольтный выпрямитель импульсного и постоянного напряжения. 5) Фазоимпульсный регулятор управления тиристорами.
Расположение компонентов: Почти все радиокомпоненты схемы тиристорного электропривода размещены на печатной плате, из одностороннего стеклотекстолита. Силовой трансформатор и мощная диодно-тиристорная сборка размещены отдельно от привода. Сечение подводящего к электромотору кабеля должно соответствовать максимальным нагрузкам, а изоляция должна выдерживать двукратное рабочее напряжение, заземление радиодеталей принятое в схеме при напряжении на электроприводе выше 48 вольт не должно иметь соединение с корпусом, заземлённым с нулевым проводом подходящей электросети. Ручка регулировки оборотов электродвигателя должна иметь пластмассовый наконечник с риской или клювиком для визуального контроля скорости. Электрическая пускозащитная аппаратура на схеме отсутствует и выполняется отдельно с возможными датчиками параметров или программой работы электропривода.
Описание схемы: Скорость вращения электродвигателя привода зависит от состояния узла фазоимпульсного управления тиристорами. Фазовый сдвиг управляющего сигнала на управляющих электродах тиристоровVS1,VS2, относительно анодного напряжения, происходит при помощи фазосдвигающей цепи, состоящей из резистора R4, конденсатора С7 и транзистора VT3. Электронный мост состоит из резисторов R13,R14,R16, R17,VD12,конденсатора С7, транзистора VT3, в диагональ включены элементы: переход база — эмиттер транзистора VT4, а в точки соединения коллектора VT3 и конденсатора С7 и VD12,R16 подаётся питающее напряжение.
Во время заряда конденсатора С7 напряжение на эмиттере транзистора VT4 станет положительным, а на базе отрицательным. Транзистор VT4 находится в запертом состоянии. По окончании зарядки конденсатора C7 напряжение на выводах транзистора VT4 сменит полярность, транзистор откроется и лавинно откроет транзистор прямой проводимости VT5. Базовый ток транзистора VT4 увеличится коллекторным током транзистора VT5. Для устойчивой работы порогового устройства и повышения его помехоустойчивости на базу транзистора VT5 через резистор R14 подаётся положительное напряжение смещения с интегрального стабилизатора напряжения DA1.
Импульсное напряжение с резистора R12 подаётся на базу транзистора VT2 для усиления. В трансформаторе Т2 при прохождении тока возникает импульс, достаточный для управления работой тиристоров. Положительные импульсы поступают на управляющие электроды тиристоров, отрицательные срезаются диодом VD10. Для достижения линейной зависимости скорости вращения электродвигателя привода от задающего сигнала, необходимо напряжение заряда на конденсаторе С7 изменять по линейному закону. Для получения линейного напряжения заряда на конденсаторе он должен заряжаться постоянным по величине током. Так как ток заряда конденсатора и напряжение на нём изменяются по экспоненциальному закону, для линеаризации напряжения на конденсаторе С7 он заряжается через нелинейный элемент – транзистор VT3.
Напряжение на базе транзистора VT3 стабилизировано стабилитроном VD12. Время заряда конденсатора С7 изменяется с помощью усилителя на транзисторах VT1,VT3, в цепи их эмиттеров установлен общий резистор R13, через который протекают коллекторные составляющие токов обоих транзисторов. Так как напряжение на базе транзистора VT3 стабилизировано, то изменение напряжения на базе транзистора VT1 вызывает перераспределение токов коллекторов транзисторов VT1,VT3. Изменение тока коллектора VT3 вызывает изменение времени заряда конденсатора С7.
Напряжение на базе транзистора VT1 является входным напряжением схемы, с помощью которого идет управление мощными тиристорами VS1 -VS2. Входное напряжение представляет собой алгебраическую сумму задающего напряжения на резисторе R5 и напряжения обратной связи с электропривода, подаваемого через резистор R6.
Регулировка скорости — резистором R4, а начальные обороты устанавливаются подстроечным резистором R7. Напряжение на резисторе R5 является задающим, которое через резисторы R8,R7 поступает на базу транзистора VT1. Сигнал обратной связи, пропорциональный электродвижущей силе двигателя снимается с положительной шины питания двигателя через резистор R6. При увеличении нагрузки на валу электродвигателя его обороты падают, что ведёт к уменьшению Э.Д.С. двигателя, напряжение на резисторах R6,R7,R8 понижается, ток через транзистор VT1 уменьшается, а через транзистор VT3 увеличивается, это приводит к уменьшению времени заряда конденсатора С7, а следовательно к увеличению угла проводимости тиристоров. Напряжение на якоре электродвигателя увеличивается и в результате этого процесса обороты восстанавливаются, до прежнего уровня.
При увеличении оборотов транзистор VT1 приоткрывается, при увеличении напряжения на резисторе R7, ток через транзистор VT3 уменьшается, что ведёт к изменению времени заряда конденсатора С7 и уменьшению оборотов двигателя привода. Синхронизация управляющего сигнала с анодным напряжением на тиристорах происходит при импульсном питании схемы управления, синфазно с питанием силовых тиристоров.
Диодный мост VD3-VD6 питает элементы схемы импульсного управления через токоограничительный резистор R3. Стабилизатор на диодах VD11,VD12 формирует импульсное напряжение питания величиной 14- 16 вольт, прямоугольной формы. Интегральный стабилизатор DA1 питает стабилизированным напряжением базовую цепь транзистора VT5.
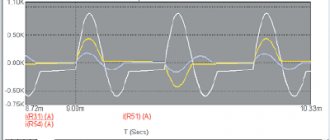
Проверка схемы заключается в проверке рабочих режимов и осциллограмм: импульсного напряжения прямоугольной формы частотой 100 гц на диоде VD11, и пилообразного на конденсаторе С7. При изменении регулятором R4 оборотов или установочным резистором R7 напряжения на базе транзистора VT1, при исправных радиодеталях, напряжение на конденсаторе С7 также должно изменяться. Далее проверяется поступление импульсного напряжения на управляющие электроды тиристоров, диоды VD8-VD9 позволяют исключить взаимное влияние управляющих электродов при большом разбросе токов управления. После подключения электродвигателя резистором R4 следует установить минимальные обороты вращения якоря, резистором R10 устанавливается напряжение на якоре в 1/10 от рабочего. Далее регулятор оборотов R4 выводим двигатель на максимальные обороты и устанавливаем напряжение на якоре в соответствии паспортному, данного исполнения.
При изменении нагрузки на электродвигатель от 0,2 до номинальной обороты не должны падать более чем на 5%, при большем значении увеличить величину обратной связи резистором R7, переведя его в нижнее положение движка. Схема управления электроприводом выполнена печатным монтажом, не имеет дефицитных радиодеталей: резисторы типа С1-4,С4-2,переменные — СП3.
Радиодетали: Силовой трансформатор выбирается из расчёта установленной мощности и напряжения электропривода типа ТС 220*127В мощностью 1,2 -3 кВатт. Тиристоры можно заменить на ВКДУ — 250. Диоды заменимы на российские аналоги типа Д226 или Д237Б. Транзисторы обратной проводимости подойдут серии КТ 312, КТ315, КТ3102Б и КТ361, КТ3107 прямой проводимости, транзистор VT2 типа КТ817Б. Конденсаторы типа К17 или МБМ, электролитические К50-6. Импульсный трансформатор Т2 выполнен на ферритовом кольце 2000НМ диаметром 10-12 мм, обмотки наматываются проводом ПЭЛ 0,12 по 40 витков.
Конструкция тиристорного электропривода «Монорельсовой дороги» выставлялась на 9 –й международной выставке ЮНЕСКо в г.Москве в 2003 году
Прикрепленные файлы:
- monorels.rar (823 Кб)