Методы пуска двигателей постоянного тока, снижающие нагрузку на детали мотора в связи с завышенными значениями пускового тока. Особенности реализации прямого пуска, его достоинства и недостатки. Как осуществляется пуск трехфазных электромоторов методом плавного увеличения питающего напряжения.
Характерной особенностью электродвигателей постоянного тока (ЭПТ) является необходимость использования пусковых токов увеличенного номинала по сравнению с более распространёнными асинхронными электродвигателями, функционирующими на переменном токе. Это заставляет производителей тщательнее выбирать способ пуска двигателя постоянного тока, от которого будет зависеть функциональность электромотора, его надежность и долговечность.
На практике применяют несколько методов пуска, каждый из которых способен временно ограничить значение пускового тока, чтобы цепь обмотки якоря преждевременно не вышла из строя.
Рассмотрим перечисленные способы детальнее.
Прямой пуск
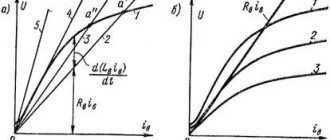
При запуске ЭПТ токовая нагрузка растет вместе с увеличением значения крутящего момента, передаваемого на ротор. Этот момент характеризуется значительным ростом температуры обмотки статора, что может стать причиной повреждения изоляции и короткого замыкания. Резкое возрастание нагрузки чревато сильными вибрациями и приводит к механическому повреждению деталей мотора.
При прямом пуске проблема решается подключением обмотки якоря непосредственно к электроцепи, но при условии стабильности показателей электрического тока.
Прямой пуск электродвигателя ПТ используется для маломощных электродвигателей (с номиналом, не превышающим 1 кВт), и он самый простой в реализации. Рабочие температуры при этом растут не настолько сильно, как при использовании других способов пуска.
В случае интенсивной эксплуатации электродвигателя с частым включением/выключением его оснащают расцепителем, управляемым вручную. Его задача – подавать напряжение в момент пуска непосредственно на клеммы двигателя.
Условные обозначения двигателей постоянного тока серии П.
П Х1 Х2 Х3 М П – машина постоянного тока; Х1 – исполнение по степени защиты и способу охлаждения. Без буквы – брызгозащищенный с самовентиляцией 1-6 габарит. Б – закрытое исполнение с естественным охлаждением 1-4 габарит; Х2 – габарит электрической машины. 1-1 габарит, 2-2 габарит, 3-3 габарит, 4-4 габарит, 5-5 габарит, 6-6 габарит; Х3 – условная длина сердечника якоря. 1 – первая длина, 2 – вторая длина; М – морское исполнение;
По способу монтажа электродвигатели постоянного тока имеют конструктивное исполнение — IM1001, IM2101, IM2111, IM2131, IM3601, IM3631, IM3611. Двигатели постоянного тока могут быть изготовлены с присоединенным тахогенератором.
Условия эксплуатации электродвигателей постоянного тока П51, П52.
- Двигатели постоянного тока П51, П52 выпускаются для работы при температуре окружающей среды от -40°С до +40°С.
- При температуре окружающей среды 20° ± 5°С % относительная влажность 95°±3°С%.
- Выдерживают — вибрацию, ударные сотрясения, долговременные наклоны оси электродвигателя постоянного тока от 45° в любую сторону и при качке до 45° с периодом качки 7-9 с.
Возбуждение двигателя постоянного тока последовательное, параллельное, смешанное, независимое. Класс нагревостойкости изоляция электродвигателя постоянного тока — Н. Общий уровень вибрации электродвигателей и уровня интенсивности воздушного шума соответствуют всем принятым нормам.
Габаритные и присоединительные размеры двигателей постоянного тока П51, П52, ПБ51, ПБ52
| Тип двигателей постоянного тока | Размеры, мм | Масса, кг при IM2101, IM2102, IM3601, IM2103, IM2104, IM3611, IM3631 | Масса, кг при IM1001, IM1004 | ||||||
| b10 | d1 | d20 | d30 | l10 | l30 | h | |||
| П51У4 | 264 | 35 | 255 | 352 | 225 | 606 | 180 | 122 | 115 |
| ПБ51У2 | 638 | 127 | 120 | ||||||
| П52У4 | 264 | 35 | 255 | 352 | 265 | 646 | 180 | 142 | 135 |
| ПБ52У2 | 678 | 147 | 140 |
Основные технические характеристики двигателей постоянного тока П51, П52
| Тип | Мощность, кВт | Напряжение В | Ток сети А | Частота вращения, об/мин | КПД % |
| П51М | 2,7 | 110 | 33 | 750/1500 | 71 |
| 2,7 | 220 | 17,2 | 750/1500 | 74 | |
| 4,2 | 110 | 52,2 | 1000/2000 | 73 | |
| 4,2 | 220 | 25,6 | 1000/2000 | 74,5 | |
| 7,4 | 110 | 83,6 | 1500/2250 | 79,5 | |
| 7,4 | 220 | 41,8 | 1500/2250 | 80 | |
| 14,5 | 110 | 153 | 3000/3300 | 85 | |
| 14,5 | 220 | 77,3 | 3000/3300 | 85 | |
| П52М | 3,4 | 220 | 20,8 | 750/1500 | 74,5 |
| 5 | 110 | 58,5 | 1000/2000 | 77 | |
| 5 | 220 | 29,2 | 1000/2000 | 77 | |
| 8,8 | 110 | 97,8 | 1500/2250 | 81,5 | |
| 8,8 | 220 | 48 | 1500/2250 | 82,5 | |
| 16 | 220 | 84,5 | 2800 | 86 | |
| 20 | 220 | 104 | 3000/3300 | 87 |
Электродвигатели постоянного тока серии П 1, 2, 3, 4 габаритовЭлектродвигатели постоянного тока серии П51, П52Электродвигатели постоянного тока серии П61, П62Двигатели постоянного тока серии 2П (2ПО132 — 2ПО200, 2ПФ132 — 2ПФ200)Электродвигатели постоянного тока 2ПН, 2ПБЭлектрические машины постоянного тока серии 4ПДвигатели постоянного тока ДП-112, ДК-112, ДКУ-112Двигатели МР на постоянных магнитах
Двигатели МТА на постоянных магнитахДвигатели PI, PC, 3PI на постоянных магнитахДвигатели MX, МВН, МВО на постоянных магнитахЭлектродвигатели постоянного тока серии ДЭлектродвигатели постоянного тока ДПМЭлектродвигатели постоянного тока ДПУРЭлектродвигатели постоянного тока ПБС, ПБСТЭлектродвигатели постоянного тока ДК-309М
Реостатный пуск
Этот способ, в отличие от предыдущего, используется для обеспечения пуска электромоторов повышенной мощности.
Для этого в его электрическую схему включают реостат, представляющий собой секционный провод с высоким показателем удельного сопротивления. При реостатном способе пуска ЭПТ сопротивление реостата быстро уменьшается, что позволяет исключить большие перепады по току.
Такой прием позволяет осуществлять разгон вала электромотора с постоянным ускорением, что положительно сказывается на долговечности двигателя. Число секций реостата может варьироваться в широких пределах, обычно это 2-7 сегментов. Их количество зависит от разности максимального и минимального значений пускового тока, а также от требований к плавности пуска.
Задача обеспечения выравнивания значений пускового тока на всех стадиях процесса в рамках заданного временного промежутка решаема, но в целом автоматизации не поддается. Если без этого нельзя, то есть ЭПТ является частью автоматизированного комплекса, используется приём с автоматическими контакторами, которые срабатывают поочередно и шунтируют пусковые сопротивления.
При выходе двигателя на рабочие обороты реостат подлежит отключению от цепи, поскольку его характеристики позволяют работать непродолжительное время, иначе он просто выйдет из строя. Снижение сопротивления, как и его рост в начале, происходит дискретно.
Динамическое торможение.
Необходимость в таком торможении возникает в том случае, когда после отключения двигателя от сети его якорь под действием кинетической энергии движущихся масс электропривода продолжает вращаться. Если при этом обмотку якоря, отключив от сети, замкнуть на резистор rт, то двигатель перейдет в генераторный режим (обмотка возбуждения должна оставаться включенной в сеть). Вырабатываемая при этом электроэнергия не возвращается в сеть, как это происходит при рекуперативном торможении, а преобразуется в теплоту, которая выделяется в сопротивлении
В режиме динамического торможения ЭДС якоря не меняет своего направления, но поскольку якорь отключен от сети (U = 0), то ток якоря изменит направление, так как будет создаваться ЭДС Еа
т.е. станет отрицательным. В результате электромагнитный момент также изменит направление и станет тормозящим (рис. 13.15, б). Процесс торможения продолжается до полной остановки якоря (n = 0).
Плавный пуск
Метод плавного пуска электрического двигателя постоянного тока номиналом 12В применяется как альтернатива реостатному. Он используется в ситуациях, когда задача контроля скорости вращения не стоит. В качестве примера можно назвать аварийные турбинные насосы.
Принцип функционирования следующий: после запуска электродвигателя постоянного тока срабатывает устройство, удерживающее ток на якоре в рамках определенного значения, которое выше тока на валу мотора, и этот регулятор напряжения работает до тех пор, пока обороты двигателя не достигнут номинальных величин.
После этого ЭПТ начинает работать в обычном режиме, соответствующем величине напряжения источника питания, который не обязательно должен быть маломощной сетью постоянного тока – допускается использование аккумуляторов. Его подключение к двигателю осуществляется посредством специальных контакторов.
Отметим, что при методе плавного пуска мотора постоянного тока используются разные схемы пуска – от однофазных до трехфазных. Последняя сложнее в реализации, но считается самой надежной и универсальной.
Независимо от вида пуска (прямого, плавного, реостатного) двигателя постоянного тока, используются несколько типов возбуждения:
- последовательное;
- параллельное;
- независимое.
Рассмотрим особенности пуска электродвигателя перечисленных типов возбуждения.
Бесколлекторный электродвигатель постоянного тока. Общие сведения и устройство прибора
Контроллеры электродвигателей такого типа зачастую питаются благодаря постоянному напряжению, отчего и получили своё название. В англоязычной технической литературе вентильный электродвигатель называют PMSM или BLDC.
Бесколлекторный электродвигатель был создан в первую очередь для оптимизации любого электродвигателя постоянного тока в целом. К исполнительному механизму такого устройства (особенно к высокооборотному микроприводу с точным позиционированием) ставились очень высокие требования.
Это, пожалуй, и обусловило использование таких специфических приборов постоянного тока, бесколлекторные трёхфазные двигатели, также называемые БДПТ. По своей конструкции они практически идентичны синхронным двигателям переменного тока, где вращение магнитного ротора происходит в обычном шихтованном статоре при наличии трёхфазных обмоток, а количество оборотов зависит напряжения и нагрузок статора. Исходя из определённых координат ротора, происходит переключение разных обмоток статора.
обмотки статора выполняют функцию фиксирующего элемента
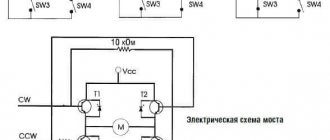
Если одна из обмоток будет выключена, то будет измеряться и в дальнейшем обрабатываться тот сигнал, который был наведён, однако, такой принцип работы невозможен без профессора обработки сигналов. А вот для реверса или торможения такого электродвигателя мостовая схема не нужна – достаточно будет подачи в обратной последовательности управляющих импульсов на обмотки статора.
В ВД (вентильном двигателе) индуктор в виде постоянного магнита расположен на роторе, а якорная обмотка – на статоре. Исходя из положения ротора, формируется напряжение питания всех обмоток электродвигателя. При использовании в таких конструкциях коллектора, его функцию будет выполнять в вентильном двигателе полупроводниковый коммутатор.
Основное отличие синхронного и вентильного двигателей заключается в самосинхронизации последнего при помощи ДПР, что обусловливает пропорциональную частоту вращения ротора и поля.
Чаще всего бесколлекторный электродвигатель постоянного тока находит применение в следующих сферах:
- морозильное или холодильное оборудование (компрессоры);
- электропривод;
- системы нагрева воздуха, его кондиционирования или вентиляции.
Статор
Это устройство имеет классическую конструкцию и напоминает такой же прибор асинхронной машины. В состав входит сердечник из медной обмотки (уложенной по периметру в пазы), определяющей количество фаз, и корпус. Обычно синусной и косинусной фаз достаточно для вращения и самозапуска, однако, часто вентильный двигатель создают трёхфазным и даже четырёхфазным.
Электродвигатели с обратной электродвижущей силой по типу укладки витков на обмотке статора делятся на два типа:
- синусоидальной формы;
- трапецеидальной формы.
В соответствующих видах двигателя электрический фазный ток меняется также по способу питания синусоидально или трапецеидально.
Ротор
Самыми распространёнными и дешёвыми для изготовления ротора считаются ферритовые магниты, но их недостатком является низкий уровень магнитной индукции, поэтому на замену такому материалу сейчас приходят приборы, созданные из сплавов различных редкоземельных элементов, поскольку могут предоставить высокий уровень магнитной индукции, что, в свою очередь, позволяет уменьшить размер ротора.
ДПР
Датчик положения ротора обеспечивает обратную связь. По принципу работы устройство делится на такие подвиды:
- индуктивный;
- фотоэлектрический;
- датчик с эффектом Холла.
Последний тип получил наибольшую популярность благодаря своим практически абсолютным безынерционным свойствам и способности избавляться по положению ротора от запаздывания в каналах обратной связи.
Система управления
Система управления состоит из силовых ключей, иногда также из тиристоров или силовых транзисторов, включающих изолированный затвор, ведущих к сбору инвертора тока либо инвертора напряжения. Процесс управления этими ключами реализуется чаще всего путём использования микроконтроллера, требующего для управления двигателем огромного количества вычислительных операций.
Запуск ЭПТ с параллельным возбуждением
При использовании такой схемы обмотка якоря и обмотка возбуждения подключены параллельно, что обеспечивает одинаковую разность потенциалов. При этом на вход вспомогательной обмотки при пуске подается несколько меньший ток, нежели на обмотки статора/ротора.
Чтобы снизить влияние пусковых характеристик на оборудование, непосредственно при старте срабатывает реостат, уменьшая нагрузки на мотор, после чего отключается. Если пуск в силу разных причин может оказаться затяжным, используется схема, состоящая из нескольких пусковых резисторов/реостатов:
В этом случае последовательность сопротивлений Rпуск1-Rпуск3 позволяет снизить ток, идущий через обмотки, до минимальных значений. Как только ток достигнет порогового значения, сработают реле К1-К3, что приведёт к замыканию контакта К1.1. В результате первый резистор будет зашунтирован, ток скачкообразно повысится, но за счёт оставшихся резисторов снова снизится, и в момент минимума замкнется следующий контакт, а затем по такой же схеме – последний. К этому моменту скорость вращения вала достигнет номинала.
При торможении эта же схема сработает в обратную сторону.
Что происходит при пуске двигателя
По мере нарастания токовой нагрузки на обмотке статора увеличивается крутящий момент электродвигателя, который через вал передается на его подвижную часть – ротор. Чем быстрее возрастает крутящий момент, тем сильнее разогревается обмотка статора.
Это явление может привести к:
- выходу из строя изоляции;
- возникновению вибраций;
- деформации механических частей двигателя;
- полному выходу из строя мотора.
Большой ток может вызвать бурное искрение под щетками, что приведет к выходу из строя коллектора.
Избежать поломки можно, понизив пусковой ток до номинальной частоты вращения сразу после старта электромотора. Добиться этого можно несколькими способами. Выбор оптимального варианта зависит от технических характеристик мотора и его назначения.
Запуск ЭПТ с последовательным возбуждением
Особенностью применения для пуска двигателей постоянного тока такой схемы является последовательное подключение к мотору переменного сопротивления и катушки возбуждения.
В этом случае, как и в предыдущем, по цепи обеих катушек будет протекать ток одинакового номинала. Подобный метод характеризуется неплохими пусковыми характеристиками, но при условии, что вал электродвигателя в этот момент будет находиться подл нагрузкой. И ещё одна особенность ЭПТ с последовательным возбуждением: частота вращения вала в ходе пуска будет регулироваться в зависимости от нагрузки. Подобная схема идеально подходит для электротранспорта – трамваев, троллейбусов, с некоторыми модификациями – на поездах с электротягой.
Принципиальная схема пуска ЭПТ с последовательным возбуждением:
Пуск с помощью пускового реостата
В этом случае в цепь вводится переменное сопротивление, которое на начальном этапе обеспечивает снижение токовой нагрузки, пока вращение ротора не достигнет установленных оборотов. По мере стабилизации ампеража до стандартной величины в реостате уменьшается сопротивление от максимального значения до минимального.
Расчет электрической величины в этом случае будет производиться по формуле:
I = U / (Rобм + Rреостата)
В лабораторных условиях уменьшение нагрузки может производиться вручную – посредством перемещения ползунка реостата. Однако в промышленности такой метод не получил широкого распространения, так как процесс не согласовывается с токовыми величинами. Поэтому применяется регулировка по току, по ЭДС или по времени, в первом случае задействуется измерение величины в обмотках возбуждения, во втором, на каждую ступень применяется выдержка времени.
Оба метода используются для запуска электродвигателей:
- с последовательным;
- с параллельным возбуждением;
- с независимым возбуждением.
Запуск ДПТ с параллельным возбуждением
Такой запуск электродвигателя осуществляется посредством включения и обмотки возбуждения, и якорной к напряжению питания электросети, друг относительно друга они располагаются параллельно. То есть каждая из обмоток электродвигателя постоянного тока находятся под одинаковой разностью потенциалов. Этот метод запуска обеспечивает жесткий режим работы, используемый в станочном оборудовании. Токовая нагрузка во вспомогательной обмотке при запуске имеет сравнительно меньший ток, чем обмотки статора или ротора.
Для контроля пусковых характеристик сопротивления вводятся в обе цепи:
Рис 1. Запуск ДПТ с параллельным возбуждением
На начальном этапе вращения вала позиции реостата обеспечивают снижение нагрузки на электродвигатель, а затем их обратно выводят в положение нулевого сопротивления. При затяжных запусках выполняется автоматизация и комбинация нескольких ступеней пусковых реостатов или отдельных резисторов, пример такой схемы включения приведен на рисунке ниже:
Рис. 2. Ступенчатый пуск двигателя параллельного возбуждения
- При подаче напряжения питания на электродвигатель ток, протекающий через рабочие обмотки и обмотку возбуждения, за счет магазина сопротивлений Rпуск1, Rпуск2, Rпуск3 нагрузка ограничивается до минимальной величины.
- После достижения порогового значения минимума токовой величины происходит последовательное срабатывание реле K1, K2, K3.
- В результате замыкания контактов реле K1.1 шунтируется первый резистор, рабочая характеристика в цепи питания электродвигателя скачкообразно повышается.
- Но после снижения ниже установленного предела замыкаются контакты K2.2 и процесс повторяется снова, пока электрическая машина не достигнет номинальной частоты вращения.
Торможение электродвигателя постоянного тока может производиться в обратной последовательности за счет тех же резисторов.
Запуск ДПТ с последовательным возбуждением
Рис. 3. Запуск ДПТ с последовательным возбуждением
На рисунке выше приведена принципиальная схема подключения электродвигателя с последовательным возбуждением. Ее отличительная особенность заключается в последовательном соединении катушки возбуждения Lвозбуждения и непосредственно мотора, переменное сопротивление Rякоря также вводится последовательно.
По цепи обеих катушек протекает одинаковая токовая величина, эта схема обладает хорошими параметрами запуска, поэтому ее часто используют в электрическом транспорте. Такой электродвигатель запрещено включать без усилия на валу, а регулирование частоты осуществляется в соответствии с нагрузкой.
Пуск ДПТ с независимым возбуждением
Подключение электродвигателя в цепь с независимым возбуждением производится путем ее запитки от отдельного источника.
Рис. 4. Запуск ДПТ с независимым возбуждением
На схеме приведен пример независимого подключения, здесь катушка Lвозбуждения и сопротивление в ее цепи Rвозбуждения получают питание отдельно от обмоток двигателя током независимого устройства. Для обмоток двигателя также включается регулировочный реостат Rякоря. При этом способе запуска машина постоянного тока не должна включаться без нагрузки или с минимальным усилием на валу, так как это приведет к нарастанию оборотов и последующей поломке.
Пуск ЭПТ с независимым возбуждением
Еще один способ пуска двигателей постоянного заключается в подключении ЭПТ в цепь посредством запитывания последней от независимого источника питания.
В приведенной в качества примера схеме катушка и сопротивление возбуждения запитываются отдельно от обмоток мотора. В цепи обмотки двигателя присутствует регулировочный реостат.
Такая реализация также требует наличия нагрузки на валу в момент пуска, в противном случае произойдет неконтролируемое повышение оборотов, чреватое поломкой мотора.
Пуск путем изменения питающего напряжения
Одной из самых сложных считается схема снижения пусковой нагрузки с применением управляемого выпрямителя или, как вариант, генератора постоянного напряжения, на плечи которого и ложится задача снижения питающего номинала по току.
В принципе с этой задачей справляется и реостат, но для электродвигателей повышенной мощности КПД реостата резко снижается. Использование отдельной микросхемы для изменения питающего напряжения позволяет снизить потери.
Вариант с генератором или выпрямителем используется на эл. моторах повышенной мощности. У него имеется еще один плюс: возможность реверсирования, которое реализуется изменением направления протекания тока в якоре.