Часто при эксплуатации различного оборудования возникает необходимость контролировать скорость оборотов электродвигателя постоянного тока. Для этого используются специальные регуляторы или преобразователи частоты. Простейший регулятор можно сделать своими руками.
В процессе эксплуатации современных электроинструментов и различного оборудования часто возникает необходимость контролировать мощность и скорость вращения двигателей постоянного тока. Для решения подобных задач принято использовать специальные регуляторы или преобразователи частоты, которые в большом ассортименте сейчас представлены на электротехническом рынке. Правильно подобранный частотный преобразователь позволяет плавно уменьшать или увеличивать обороты вала и обеспечивает длительную бесперебойную работу механизмов.
Чтобы лучше понять принцип работы регулятора оборотов двигателя постоянного тока, рекомендуется сделать его своими руками. Это вполне по силам даже человеку без глубоких познаний и специализированных навыков в радиоэлектронике. Для создания самодельного прибора обязательно понадобится схема регулятора на 12В или 24В, оптимально подходящая под особенности и характеристики вашего электромотора, работающего от обычной домашней электросети 220 вольт или же предназначенного для сети с тремя фазами.
Сферы применения и критерии выбора регулятора оборотов
Зачастую регулятор вращения электромоторов необходим для корректной работы:
- промышленных и бытовых электрических приводов;
- электросварочных аппаратов;
- систем отопления и кондиционирования;
- электропечей;
- блоков питания компьютерной техники;
- стабилизаторов напряжения;
- стиральных и швейных машин;
- пылесосов и многого другого.
Выбирая регулятор оборотов двигателя постоянного тока, нужно обращать внимание на особенности устройства и его рекомендуемое применение:
- в электромоторах коллекторного типа чаще используются векторные регуляторы, но скалярные считаются надежнее;
- заявленная мощность контроллера должна соответствовать номинальным характеристикам силового агрегата (даже немного превышать их, чтобы обеспечить более стабильную и безопасную работу системы);
- характеристики напряжения подбираются в пределах допустимого диапазона;
- параметры преобразования частоты вращения должны отвечать техническим требованиям оборудования.
Важно также учитывать габаритные размеры, количество входов/выходов, гарантийный срок эксплуатации и прочее.
Обобщенная схема регулятора
Примером регулятора, который осуществляет принцип управления мотором без потерь мощности, можно рассмотреть тиристорный преобразователь. Это пропорционально-интегральные схемы с обратной связью, которые обеспечивают жесткое регулирование характеристик, начиная от разгона-торможения и заканчивая реверсом. Самым эффективным является импульсно-фазовое управление: частота следования импульсов отпирания синхронизируется с частотой сети. Это позволяет сохранять момент без роста потерь в реактивной составляющей. Обобщенную схему можно представить несколькими блоками:
- силовой управляемый выпрямитель;
- блок управления выпрямителем или схема импульсно-фазового регулирования;
- обратная связь по тахогенератору;
- блок регулирования тока в обмотках двигателя.
Перед тем как углубляться в более точное устройство и принцип регулирования, необходимо определиться с типом коллекторного двигателя. От этого будет зависеть схема управления его рабочими характеристиками.
Конструкционные особенности и принцип работы преобразователя частоты
Электронные частотные преобразователи используются для контроля над работой электромоторов как в трехфазной электросети 380B, так и в однофазной на 220В. Их работа базируется на изменении амплитуды и частоты электрического сигнала, что позволяет плавно менять параметры частоты вращения ротора силового агрегата. В основе конструкции большинства подобных устройств, как правило, лежат транзисторы полупроводникового типа с широтно-импульсными модуляторами. Регулировка оборотов осуществляется посредством установленного на микроконтроллере блока управления.
Часто используемые в электроинструменте и бытовой технике моторы постоянного тока коллекторного типа отличаются тем, что при прямом подключении к электросети 220 вольт они начинают выдавать максимальные обороты. Это повышает нагрузку на привод и способствует быстрому его износу. Кроме того, при большой скорости вращения ротора выделяется много тепла, что влечет за собой перегрев рабочих механизмов, оплавление обмоток и кабелей, а также может вызвать короткое замыкание. Поэтому здесь установить регулятор мощности и частоты крайне рекомендуется, даже если контроль над скоростью в техническом процессе и эксплуатации электроустановки не предусмотрен.
Особенности регулирования скорости
Важно знать, что каждый двигатель при вращении потребляет не только активную, но и реактивную мощность. При этом уровень реактивной мощности будет больше, что связано с характером нагрузки. В данном случае задачей конструирования устройств регулирования скорости вращения коллекторных двигателей является уменьшение разницы между активной и реактивной мощностями. Поэтому подобные преобразователи будут довольно сложными, и самостоятельно их изготовить непросто.
Своими руками можно сконструировать лишь некоторое подобие регулятора, но говорить о сохранении мощности не стоит. Что такое мощность? С точки зрения электрических показателей, это произведение потребляемого тока, умноженное на напряжение. Результат даст некое значение, которое включает активную и реактивную составляющие. Для выделения только активной, то есть сведения потерь к нулю, необходимо изменить характер нагрузки на активную. Такими характеристиками обладают только полупроводниковые резисторы.
Использование самодельного регулятора
Ранее самым распространенным был регулятор двигателя механического типа, где использовался шестеренчатый привод и вариатор. Но из-за износа механических частей и влияния внешних факторов они достаточно часто выходили из строя и требовали ремонта. Намного лучше зарекомендовали себя электронные устройства, позволяющие плавно или ступенчато повышать напряжение. Кроме того, они отличаются компактными размерами и возможностью более точной настройки параметров работы электроустановки.
Сделать своими руками простейший регулятор двигателя на 12B постоянного тока не составит особого труда даже при наличии базовых навыков. Для этого достаточно иметь следующие компоненты:
- переключатель на несколько позиций;
- набор резисторов проволочного типа;
- релейный и управляющий блоки.
С помощью резисторов происходит изменение напряжения от источника питания, а следовательно и частота оборотов электромотора. Такой самодельный регулятор двигателя разгоняет его ступенчато методом установки переключателя в соответствующее положение. Его можно эффективно применять для запуска силовых агрегатов асинхронного и контактного типа.
Данное устройство функционирует по следующему принципу:
- напряжение от источника питания подается на конденсатор, который полностью заряжается;
- ток перенаправляется на отходящий провод и резистор;
- подсоединенный к положительному конденсаторному контакту электрод тиристора получает нагрузку;
- после передачи заряда напряжения открывается второй полупроводник;
- поступающая от конденсатора нагрузка пропускается через тиристор и конденсатор разряжается;
- цикл полупериода повторяется.
Если схема регулятора дополнительно содержит симистор или устройство с похожим принципом действия, то изменение мощности напряжения протекает плавно. Это значит, что электромотор будет без рывков и заметных вибраций набирать обороты, постепенно выходя на нужную рабочую мощность. Также для обеспечения более качественной регулировки в схему могут быть включены переменные резисторы.
Регулирование частоты вращения ДПТ НВ введение дополнительного сопротивления в цепь якоря
Дополнительное сопротивление (реостат rд) включают в цепь якоря аналогично пусковому реостату (ПР). Однако в отличие от последнего оно должно быть рассчитано на продолжительное протекание тока.
При включении сопротивления rд в цепь якоря выражение частоты (29.5) принимает вид
, (29.12)
где — частота вращения в режиме х.х.;
— изменение частоты вращения, вызванное падением напряжения в цепи якоря.
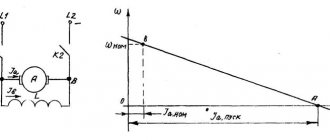
С увеличением rд возрастает , что ведет к уменьшению частоты вращения. Зависимость n = f(rд) иллюстрируется также и механическими характеристиками двигателя независимого возбуждения (рис. 29.4, а
)
:
с повышением rд увеличивается наклон механических характеристик, а частота вращения при заданной нагрузке на валу (M = Mном ) уменьшается. Этот способ обеспечивает плавное регулирование частоты вращения в широком диапазоне (только в сторону уменьшения частоты от номинальной), однако он неэкономичен из-за значительных потерь электроэнергии в регулировочном реостате (I2a *rД), которые интенсивно растут с увеличением мощности двигателя.
Рис. 29.4. Механические характеристики двигателя параллельного возбуждения:
а
— при введении в цепь якоря добавочного сопротивления;
б
— при изменении основного магнитного потока;
в — при изменении напряжения в цепи якоря
Регулятор оборотов на ШИМ транзисторе
Процесс регулировки оборотов электромотора малой мощности можно организовать с помощью транзистора ШИМ и последовательно соединенных резисторов от источника питания. Такой способ достаточно легко реализовать самостоятельно, но он отличается низким коэффициентом полезного действия и не дает возможность плавно наращивать или снижать скорость вращения ротора.
Самодельный ШИМ регулятор скорости на транзисторах имеет следующие особенности:
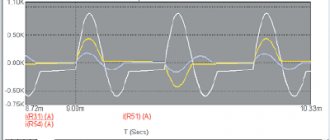
- современные транзисторы широтно-импульсной модуляции содержат 150-герцовый генератор напряжения пилообразного типа;
- в качестве компаратора применяются операционные усилители;
- длительностью импульсов управляет переменный резистор, в результате чего и происходит регулировка скорости.
Амплитуда импульсов транзистора соответствует амплитуде напряжения источника питания. Она ровная и постоянная. Благодаря такому свойству регулировка оборотов электромотора возможна даже при поступлении минимального напряжения на трансформаторную обмотку. Такой ШИМ регулятор скорости позволяет подключить к транзистору микроконтроллер и таким образом автоматизировать настройку и регулировку работы электропривода. Также в схему можно включить и другие компоненты, расширяющие функционал и возможности автоматизации электроустановки.
Детали регуляторов вращения электродвигателей
В данных схемах возможно применить следующие замены радиодеталей: транзистор КТ817Б — КТ815, КТ805; КТ117А возможно поменять КТ117Б-Г или 2N2646; Операционный усилитель К140УД7 на К140УД6, КР544УД1, ТL071, TL081; таймер NE555 — С555, КР1006ВИ1; микросхему TL074 — TL064, TL084, LM324.
При использовании более мощной нагрузки, ключевой транзистор КТ817 возможно поменять мощным полевым транзистором, например, IRF3905 или ему подобный.
На основе мощного симистора BT138-600, можно собрать схему регулятора скорости вращения двигателя переменного тока. Эта схема предназначена для регулирования скорости вращения электродвигателей сверлильных машин, вентиляторов, пылесосов, болгарок и др. Скорость двигателя можно регулировать путем изменения сопротивления потенциометра P1. Параметр P1 определяет фазу запускающего импульса, который открывает симистор. Схема также выполняет функцию стабилизации, которая поддерживает скорость двигателя даже при большой его нагрузке.
Например, когда мотор сверлильного станка тормозит из-за повышенного сопротивления металла, ЭДС двигателя также уменьшается. Это приводит к увеличению напряжения в R2-P1 и C3 вызывая более продолжительное открывание симистора, и скорость соответственно увеличивается.
Тиристорная регулировка оборотов электромотора
Менять частоту оборотов вала силового агрегата также позволяет тиристорный регулятор. Его еще называют диммер или фазовый регулятор. При таком способе подключения электромотор подсоединяется или на разрыв сетевого кабеля, или за выпрямительным мостом, питающим анодную тиристорную цепь. Такой способ управления скоростью двигателя считается достаточно надежным при условии, что в цепи нагрузки не будут возникать нарушения целостности или порядка подключения контактов. Если через тиристорный регулятор подключить коллекторный электромотор, то щетки могут начать искрить, поскольку ток нагрузки будет поступать импульсно.
Хотя и для управления 12-вольтовыми двигателями постоянного тока коллекторного типа можно приспособить тиристорный регулятор, который будет иметь некоторые особенности:
- электромотор и силовой тиристор подключаются на одну из диагоналей выпрямительного моста, а напряжение от электросети подается на другую диагональ;
- управление тиристорами производится не короткими импульсными сигналами, а с более широким диапазоном, что дает возможность исключить пагубное воздействие на работу регулятора характерных для коллекторных электромоторов кратковременных перепадов нагрузки.
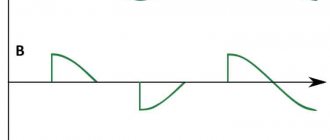
Генератор коротких, вплоть до нескольких миллисекунд, плюсовых импульсов собирается на транзисторе VT1 однопереходного типа. Он предназначен для работы вспомогательного тиристора VS1. Питающее напряжение трапецеидального вида подается на генератор благодаря ограничению 100-герцовых положительных полуволн напряжения синусоидального типа стабилитроном VD1. Каждая такая полуволна постепенно заряжает конденсатор С1 через резистивную цепочку R1-R3.
При появлении на конденсаторе напряжения, нужного для открывания транзистора, от резистора R5 на электрод управляющего тринистора VS1 подается положительный импульс, в результате чего происходит раскрытие данного тринистора, а на силовой тринистор VS2 поступает уже более продолжительный, по сравнению с сигналом управления, импульсный сигнал и на электромотор М1 поступает питание.
Регулировка частоты вращения ротора электродвигателя осуществляется с помощью переменного резистора R1, отвечающего за момент открывания силового и управляющего тиристоров, а значит и за мощность нагрузки. Анод тринистора VS2 в своей цепи имеет индуктивную нагрузку, поэтому возможно самопроизвольное открытие даже без поступления управляющего сигнала. Чтобы этого не случалось, монтируется диод VD, подключенный параллельно обмотке возбуждения LB.
Особенности конструкции
Микросхема оснащена всем необходимым для осуществления качественного управления двигателем в различных скоростных режимах, начиная от торможения, заканчивая разгоном и вращением с максимальной скоростью. Поэтому ее использование намного упрощает конструкцию, одновременно делая весь привод универсальным, так как можно выбирать любые обороты с неизменным моментом на валу и использовать не только в качестве привода конвейерной ленты или сверлильного станка, но и для перемещения стола.
Характеристики микросхемы можно найти на официальном сайте. Мы укажем основные особенности, которые потребуются для конструирования преобразователя. К ним можно отнести: интегрированную схему преобразования частоты в напряжение, генератор разгона, устройство плавного пуска, блок обработки сигналов Тахо, модуль ограничения тока и прочее. Как видите, схема оснащена рядом защит, которые обеспечат стабильность функционирования регулятора в разных режимах.
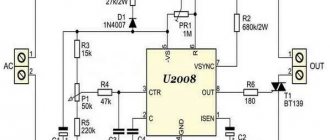
На рисунке ниже изображена типовая схема включения микросхемы.
Схема несложная, поэтому вполне воспроизводима своими руками. Есть некоторые особенности, к которым относятся предельные значения и способ регулирования скоростью:
- Максимальный ток в обмотках двигателя не должен превышать 10 А (при условии той комплектации, которая представлена на схеме). Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта.
- Максимальная скорость вращения достигается 3200 об/мин. Эта характеристика зависит от типа двигателя. Схема может управлять моторами до 16 тыс. об/мин.
- Время разгона до максимальной скорости достигает 1 секунды.
- Нормальный разгон обеспечивается за 10 секунд от 800 до 1300 об/мин.
- На двигателе использован 8-полюсный тахогенератор с максимальным выходным напряжением на 6000 об/мин 30 В. То есть он должен выдавать 8мВ на 1 об/мин. При 15000 об/мин на нем должно быть напряжение 12 В.
- Для управления двигателем используется симистор на 15А и предельным напряжением 600 В.
Если потребуется организовать реверс двигателя, то для этого придется дополнить схему пускателем, который будет переключать направление обмотки возбуждения. Также потребуется схема контроля нулевых оборотов, чтобы давать разрешение на реверс. На рисунке не указано.
Внедрение автоматики
Наличие в регуляторах оборотов и преобразователях частоты современного микроконтроллерного управления позволяет улучшить параметры работы привода, а сам мотор может функционировать в полностью автоматическом режиме, когда используемый контроллер плавно или ступенчато изменяет скорость вращения ротора силового агрегата. Сегодня в качестве микроконтроллерного управления используются процессоры, которые имеют различное число выходов и входов. К такому микроконтроллеру можно подключить разного рода электронные ключи и кнопки, всевозможные датчики потери сигнала и прочее.
На современном электротехническом рынке представлен большой ассортимент преобразователей и регуляторов частоты для любой разновидности электромотора. Но при наличии даже минимальных навыков работы с радиодеталями и умении читать электрические схемы, можно своими руками собрать устройство, которое будет постепенно или ступенчато изменять обороты двигателя. Дополнительно можно включить в цепь управляющий симисторный реостат и резистор, что даст возможность плавно менять скорость, а наличие микроконтроллерного управления полностью автоматизирует работу электропривода.
Выбор схемы
Выяснив все условия, при которых будет использоваться мотор, можно начинать изготавливать регулятор оборотов коллекторного двигателя. Начинать стоит с выбора подходящей схемы, которая обеспечит вас всеми необходимыми характеристиками и возможностями. Следует вспомнить их:
- Регулирование скорости от 0 до максимума.
- Обеспечение хорошего крутящего момента на низких скоростях.
- Плавность регулирования оборотов.
Рассматривая множество схем в интернете, можно сделать вывод о том, что мало кто занимается созданием подобных «агрегатов». Это связано со сложностью принципа управления, так как необходимо организовать регулирование многих параметров. Угол открытия тиристоров, длительность импульса управления, время разгона-торможения, скорость нарастания момента. Данными функциями занимается схема на контроллере, выполняющая сложные интегральные вычисления и преобразования. Рассмотрим одну из схем, которая пользуется популярностью у мастеров-самоучек или тех, кто просто хочет с пользой применить старый двигатель от стиральной машины.
Как изготовить своими руками?
Существуют различные варианты схем регулировки. Приведём один из них более подробно.
Вот схема его работы:
Первоначально, это устройство было разработана для регулировки коллекторного двигателя на электротранспорте. Речь шла о таком, где напряжение питания составляет 24 В, но эта конструкция применима и для других двигателей.
Слабым местом схемы, которое было определено при испытаниях её работы, является плохая пригодность при очень больших значениях силы тока. Это связано с некоторым замедлением работы транзисторных элементов схемы.
Рекомендуется, чтобы ток составлял не более 70 А. В этой схеме нет защиты по току и по температуре, поэтому рекомендуется встроить амперметр и контролировать силу тока визуально. Частота коммутации составит 5 кГц, она определяется конденсатором C2 ёмкостью 20 нф.
При изменении силы тока, эта частота может изменяться между 3 кГц и 5 кГц. Переменный резистор R2 служит для регулировки тока. При использовании электродвигателя в бытовых условиях, рекомендуется использовать регулятор стандартного типа.
При этом, рекомендуется подобрать величину R1 таким образом, чтобы правильно настроить работу регулятора. С выхода микросхемы, управляющий импульс поступает на двухтактный усилитель на транзисторах КТ815 и КТ816, далее идёт уже на транзисторы.
Печатная плата имеет размер 50 на 50 мм и изготавливается из одностороннего стеклотекстолита:
На этой схеме дополнительно указаны 2 резистора по 45 ом. Это сделано для возможного подключения обычного компьютерного вентилятора для охлаждения прибора. При использовании в качестве нагрузки электродвигателя, необходимо схему заблокировать блокирующим (демпферным) диодом, который по своим характеристикам соответствует удвоенному значению тока нагрузки и удвоенному значению питающего напряжения.
Работа устройства при отсутствии такого диода может привести к поломке вследствие возможного перегрева.
При этом, диод нужно будет поместить на теплоотвод. Для этого, можно воспользоваться металлической пластиной, которая имеет площадь 30 см2.
Регулирующие ключи работают так, что потери мощности на них достаточно малы. В
оригинальной схеме, был использован стандартный компьютерный вентилятор. Для его подключения использовалось ограничительное сопротивление 100 Ом и напряжение питания 24 В.
Собранное устройство выглядит следующим образом:
При изготовлении силового блока (на нижнем рисунке), провода должны быть присоединены таким образом, чтобы было минимум изгибов тех проводников по которым проходят большие токи.Мы видим, что изготовление такого прибора требует определённых профессиональных знаний и навыков. Возможно, в некоторых случаях имеет смысл воспользоваться покупным устройством.