Общие сведения, устройство, сфера применения
Одна из причин проявления интереса к БД — это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2.
Рис. 2. Устройство бесколлекторного двигателя
Как видите, конструкция представляет собой ротор (якорь) и статор, на первом имеется постоянный магнит (или несколько магнитов, расположенных в определенном порядке), а второй оборудован катушками (В) для создания магнитного поля.
Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем (именно такой тип конструкции можно увидеть на рисунке 2), так и внешним (см. рис. 3).
Рис. 3. Конструкция с внешним якорем (outrunner)
Соответственно, каждая из конструкций имеет определенную сферу применения. Устройства с внутренним якорем обладают высокой скоростью вращения, поэтому используются в системах охлаждения, в качестве силовых установок дронов и т.д. Приводы с внешним ротором используются там, где требуется точное позиционирование и устойчивость к перегрузкам по моменту (робототехника, медицинское оборудование, станки ЧПУ и т.д.).
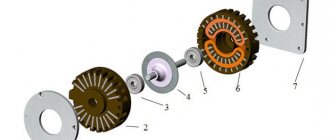
Бесколлекторный двигатель в компьютерном дисководе
Варианты конструкции двигателя
Обмотка двигателя может иметь различную конструкцию. Обмотка классической конструкции наматывается на стальной сердечник. Другой вариант конструкции обмотки – это обмотка без стального сердечника. Проводники этой обмотки равномерно распределяются вдоль окружности статора. Характеристики обмотки получаются различными, что отражается и на характеристиках двигателя. Кроме того, обмотки могут быть выполнены на различное число фаз и с различным количеством пар полюсов.
Бесколлекторные двигатели также могут иметь конструкции, различающиеся по взаимному расположению ротора и статора. Наиболее распространена конструкция, когда ротор охватывается статором снаружи – двигатели с внутренним ротором. Но также возможна, и встречается на практике конструкция в которой ротор расположен снаружи статора – двигатели с внешним ротором. Третий вариант – статор расположен параллельно ротору и оба располагаются перпендикулярно оси вращения двигателя. Такие двигатели называют двигателями аксиальной конструкции.
Датчик положения, который измеряет угловое положение ротора двигателя — это важная часть приводной системы, построенной на бесколлекторном двигателе. Этот датчик может быть самым разным как по типу, так и по принципу действия. Традиционно используемый для этой цели тип датчиков – датчики Холла с логическим выходом, устанавливаемые на каждую фазу двигателя. Выходные сигналы этих датчиков позволяют определить положение ротора с точностью до 60° — достаточной реализации самых простых способов управления обмотками. Для реализации способов управления двигателем, предполагающих формирование на обмотках двигателя системы синусоидальных напряжений при помощи ШИМ необходим более точный датчик, например, энкодер. Инкрементные энкодеры, очень широко используемые в современном электроприводе, могут обеспечить достаточно информации о положении ротора только при использовании их вместе с датчиками Холла. Если бесколлекторный двигатель оснащён абсолютным датчиком положения – абсолютным энкодером или резольвером (СКВТ), то датчики Холла становятся не нужны, так как любой из этих датчиков обеспечивает полную информацию о положении ротора.
Можно управлять бесколлекторным двигателем, и не используя датчика положения ротора – бездатчиковая коммутация. В этом случае информация о положении ротора восстанавливается на основании показаний других датчиков, например, датчиков фазных токов двигателя или датчиков напряжения. Такой способ управления часто влечёт за собой ряд недостатков (ограниченный диапазон скоростей, высокая чувствительность к параметрам двигателя, специальная процедура старта), что ограничивает его распространение.
Принцип работы
В отличие от других приводов, например, асинхронной машины переменного тока, для работы БД необходим специальный контроллер, который включает обмотки таким образом, чтобы векторы магнитных полей якоря и статора были ортогональны друг к другу. То есть, по сути, устройство-драйвер регулирует вращающий момент, действующий на якорь БД. Наглядно этот процесс продемонстрирован на рисунке 4.
Фазы работы бесколлекторного привода
Как видим, для каждого перемещения якоря необходимо выполнять определенную коммутацию в обмотке статора двигателя бесколлекторного типа. Такой принцип работы не позволяет плавно управлять вращением, но дает возможность быстро набрать обороты.
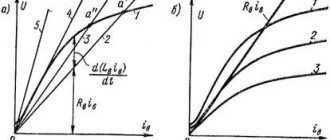
Настройки регуляторов
Что бы войти в настройки регуляторов нам нужна специальная программа BLHeliSuite32.Скачиваем её, устанавливаем и запускаем.В роли адаптера выступает сам мозг квадрокоптера. После всех манипуляций, подключаем мозг к компьютеру, и подсоединяем батарейку к квадрокоптеру.В окне выбираем нужный нам ком порт и жмём коннект.Для того что бы прочитать настройки регуляторов жмём Read setup.
Выскакивает окно о версиях прошивки каждого регулятора и то что с ними всё в порядке.
Жмём ок и нам сообщают что настройки 1 регулятора прочитаны, жмём окей и можем приступить к настройке если надо.
Из интересного я бы выделил это тепловую защиту каждого регулятора и защиту по току, то-есть больше указанного значения Ампер регулятор не будет потреблять.
Отличия коллекторного и бесколлекторного двигателя
Привод коллекторного типа отличается от БД как конструктивными особенностями (см. рис 5.), так и принципом работы.
Рис. 5. А – коллекторный двигатель, В – бесколлекторный
Рассмотрим конструктивные отличия. Из рисунка 5 видно, что ротор (1 на рис. 5) двигателя коллекторного типа, в отличие от бесколлекторного, имеет катушки, у которых простая схема намотки, а постоянные магниты (как правило, два) установлены на статоре (2 на рис. 5). Помимо этого на валу установлен коллектор, к которому подключаются щетки, подающие напряжение на обмотки якоря.
Кратко расскажем о принципе работы коллекторных машин. Когда на одну из катушек подается напряжение, происходит ее возбуждение, и образуется магнитное поле. Оно вступает во взаимодействие с постоянными магнитами, это заставляет проворачиваться якорь и размещенный на нем коллектор. В результате питание подается на другую обмотку и цикл повторяется.
Частота вращения якоря такой конструкции напрямую зависит от интенсивности магнитного поля, которое, в свою очередь, прямо пропорционально напряжению. То есть, чтобы увеличить или уменьшить обороты, достаточно повысить или снизить уровень питания. А для реверса необходимо переключить полярность. Такой способ управления не требует специального контролера, поскольку регулятор хода можно сделать на базе переменного резистора, а обычный переключатель будет работать как инвертор.
Конструктивные особенности двигателей бесколлекторного типа мы рассматривали в предыдущем разделе. Как вы помните, их подключение требует наличия специального контролера, без которого они просто не будут работать. По этой же причине эти двигатели не могут использоваться как генератор.
Стоит также отметить, что в некоторых приводах данного типа для более эффективного управления отслеживаются положения ротора при помощи датчиков Холла. Это существенно улучшает характеристики бесколлекторных двигателей, но приводит к удорожанию и так недешевой конструкции.
Приступим к осмотру посылки и содержимого.
Приходит регулятор в простом почтовом пупырчатом конверте.Внутри находиться регулятор в антистатическом пакете, пакетик с 4 проставками из текстолита и инструкция с распинвокой.
Осмотрим сначала нижнюю сторону платы.Как видно пайка хорошая, для каждого регулятора присутствует свой индивидуальный датчик тока(с которого мы можем получать данные).Так же в глаза бросается большое количество конденсаторов, по заявлению производителя их напаяно достаточно, так что установка доп. конденсаторов не нужна.
Странное и спорное решение насчёт оголённых участков платы.Зачем сделано не понятно, но опустим это.
Видим 4 32-х битных STM процессора на плате. Маркировка — f051k86
Потом идут 4 драйвера ключей. Маркировка — fortior fd6288q
Перевернём плату и осмотрим другую её сторону. Как видно все мосфеты собраны в одно место.Моё мнение это только лучше так как минимум дорожек надо вести по плате, выглядит эстетичнее, больше места стало непосредственно для вывода дорожек к которым будут подпаиваться провода моторов. Маркировка мосфетов — QN3109 721 03Q
Теперь рассмотрим дорожки!
Как видно они стали больше.Так же видно что дорожка не кончается оголённой частью, по бокам есть непосредственно запас ещё! Выглядит внушительно.
Если посмотреть как бы в разрез платы, есть ощущение что дорожки примерно утоплены на пол платы.К сожалению камера не смогла чётко показать это, и я могу ошибаться.Но, данный регулятор летает и проблем с дорожками нету, об этом подробнее далее.
Небольшие опасения вызывают конденсаторы стоящие на краю платы.Но я на болт накрутил пластиковую гайку и всё прекрасно с запасом встало.
Фото установки
Постарался максимально понятно сфоткать
Взглянем на инструкцию.На что хочется обратить внимание, это на то что в инструкции стоит рабочее напряжение 3-4s а на сайте 3-6s! Лично я летал на 4s только.
Чему я очень обрадовался, так это тому что они добавили в разъём вывод телеметрии!!! Теперь одним «шлейфом» всё соединили и ни какой доп пайки.Но! Если вам нужно Airbot оставил пятаки (SWC) на плате с выводом телеметрии
Общий план распиновки и нумерации деталей на плате.
Как запустить бесколлекторный двигатель?
Чтобы заставить работать приводы данного типа, потребуется специальный контроллер (см. рис. 6). Без него запуск невозможен.
Рис. 6. Контроллеры бесколлекторных двигателей для моделизма
Собирать самому такое устройство нет смысла, дешевле и надежней будет приобрести готовый. Подобрать его можно по следующим характеристикам, свойственным драйверам шим каналов:
- Максимально допустимая сила тока, эта характеристика приводится для штатного режима работы устройства. Довольно часто производители указывают такой параметр в названии модели (например, Phoenix-18). В некоторых случаях приводится значение для пикового режима, который контролер может поддерживать несколько секунд.
- Максимальная величина штатного напряжения для продолжительной работы.
- Сопротивление внутренних цепей контроллера.
- Допустимое число оборотов, указывается в rpm. Сверх этого значения контроллер не позволит увеличить вращение (ограничение реализовано на программном уровне). Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество. Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm.
- Частота генерируемых импульсов, у большинства контролеров этот параметр лежит в пределах от 7 до 8 кГц, более дорогие модели позволяют перепрограммировать параметр, увеличив его до 16 или 32 кГц.
Обратим внимание, что первые три характеристики определяют мощность БД.
Схема подключения
Как было сказано выше, для работы бесколлекторного двигателя нужен специальный контроллер. На алиэкспресс можно найти как комплекты из двигателя и контроллера, так и по отдельности. Контроллер также называют ESC Motor или Electric Speed Controller. Выбирают их по силе тока, отдаваемого в нагрузку.
Обычно подключение электродвигателя к контроллеру не вызывает затруднений и понятно даже для чайников. Главное, что нужно знать — для смены направления вращения нужно изменить подключение любых двух фаз, собственно также, как и в трёхфазных асинхронных или синхронных электродвигателях.
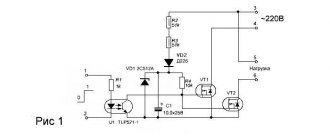
В сети есть и ряд технических решений и схем как сложных, так и для чайников, которые вы можете увидеть ниже.
В этом видеоролике автор рассказывает, как подружить БК моторчик с «ардуиной».
А в этом ролике вы узнаете о различных способах подключения к разным регуляторам и как его можно сделать своими руками. Автор демонстрирует это на примере моторчика от HDD, и пары мощных экземпляров — inrunner и outrunner.
Кстати схему из видео для повторения также прикладываем:
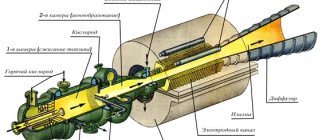
Трёхфазный бесколлекторный электродвигатель постоянного тока
Большинство БД выполняются в трехфазном исполнении. Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное (см. рис.7).
Рисунок 7. Диаграммы напряжений БД
Чтобы объяснить, как работает такой вентильный двигатель, следует вместе с рисунком 7 рассматривать рисунок 4, где поочередно изображены все этапы работы привода. Распишем их:
- На катушки «А» подается положительный импульс, в то время как на «В» — отрицательный, в результате якорь сдвинется. Датчиками зафиксируется его движение и подастся сигнал для следующей коммутации.
- Катушки «А» отключается, и положительный импульс идет на «С» («В» остается без изменения), далее подается сигнал на следующий набор импульсов.
- На «С» — положительный, «А» — отрицательный.
- Работает пара «В» и «А», на которые поступают положительный и отрицательный импульсы.
- Положительный импульс повторно подается на «В», и отрицательный на «С».
- Включаются катушки «А» (подается +) и повторяется отрицательный импульс на «С». Далее цикл повторяется.
В кажущейся простоте управления есть масса сложностей. Нужно не только отслеживать положение якоря, чтобы произвести следующую серию импульсов, а и управлять частотой вращения, регулируя ток в катушках. Помимо этого следует выбрать наиболее оптимальные параметры для разгона и торможения. Стоит также не забывать, что контроллер должен быть оснащен блоком, позволяющим управлять его работой. Внешний вид такого многофункционального устройства можно увидеть на рисунке 8.
Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателем
Схема управления двигателем через Arduino
Для извлечения мотора из корпуса HDD просто открутите все винтики. Некоторые винты могут быть скрыты под этикеткой.
Внимание! К приводу подключена лента, не тяните ее, потому что внутри очень тонкие провода, которые подключены к катушкам двигателя. Предлагаем припаять дополнительные провода, как видно на фото.
Затем припаяйте удлинительные провода. Подключение к Arduino делаем по такой схеме:
Нужно 3 цифровых контакта для отправки сигнала, тут контакты 2, 3, 4.
Преимущества и недостатки
Электрический бесколлекторный двигатель имеет много достоинств, а именно:
- Срок службы значительно дольше, чем у обычных коллекторных аналогов.
- Высокий КПД.
- Быстрый набор максимальной скорости вращения.
- Он более мощный, чем КД.
- Отсутствие искр при работе позволяет использовать привод в пожароопасных условиях.
- Не требуется дополнительное охлаждение.
- Простая эксплуатация.
Теперь рассмотрим минусы. Существенный недостаток, который ограничивает использование БД – их относительно высокая стоимость (с учетом цены драйвера). К числу неудобств следует отнести невозможность использования БД без драйвера, даже для краткосрочного включения, например, чтобы проверить работоспособность. Проблемный ремонт, особенно если требуется перемотка.
Область применения БДПТ
БДТП широко используют как и для мелкой бытовой техники, аудио-, видео- устройствах, а также компонентах ПК и ноутбуков, таких как: жесткие диски, проигрыватели, дисководы, аккумуляторы и батареи.
Также их применяют для гаджетов и девайсов для развлечений и работы, как радиоуправляемые приборы. Без БДТП не обходится и на производственных станках и профессиональном заводском оборудовании.
Бесколлекторные двигатели обязательно оснащают колеса современной электро-техники, например, скутера, мотоциклы, велосипеды и сигвеи. Не исключение и экологически чистые новинки автомобилей.
Как видно область БДТП невероятно огромна, поскольку отсутствие самого коллектора позволяет использовать устройство в местах с повышенным риском аварийных ситуаций, слишком высокой влажностью, резкими перепадами температур.
Дошло до того, что БДТП используют в космическом производстве, что не может не радовать наблюдателей технического прогресса.