Зачастую приходится понижать скорость вращения двигателя, выполняющего определенные задачи в механизме. Уменьшение числа оборотов элеткродвигателя можно добиться с помощью самодельных приборов, управляющих схем стандартного изготовления.
Электродвигатели переменного тока часто используются в деятельности человека, на металлообрабатывающих станках, транспорта, крановых механизмов и другого оборудования. Двигатели превращают энергию переменного тока питания во вращение вала и агрегатов. Используются в основном асинхронные двигатели переменного тока.
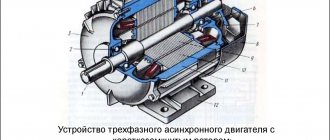
Ротор, а также и статор двигателя состоят из катушек провода, уложенного в сердечник, изготовленный из специальной стали. Классификация электродвигателей следует от способа закладки обмотки.
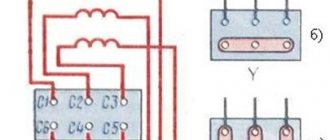
Обмотка из латунных и медных стержней вставляется в сердечник, по краям устанавливаются кольца. Такая катушка провода называется короткозамкнутым (КР) ротором. Электродвигатели небольшой мощности имеют стержни, а также диски, которые были отлиты вместе. Для электродвигателей с мощным моментом детали отливаются отдельно, затем свариваются. Обмотка статора может быть подключена двумя методами: треугольником, звездой.
Фазный ротор состоит из 3-фазной роторной обмотки, подключенной контактными кольцами и щетками к питанию. Обмотка соединена «звездой».
Расчет количества оборотов асинхронного двигателя
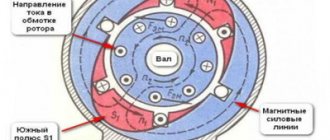
Распространенным двигателем на станках и подъемных устройствах является двигатель с короткозамкнутым ротором, поэтому пример для расчета следует брать для него. Сетевое напряжение поступает на статорную обмотку. Обмотки смещены друг от друга на 120 градусов. Возникшее поле электромагнитной индукции возбуждает электрический ток в обмотке. Ротор начинает работать под действием ЭМС.
Основной характеристикой работы двигателя является число оборотов в минуту. Рассчитываем это значение:
n = 60 f / p, обор / мин;
где f – частота сети, герц, р – количество полюсов статора (в парах).
На корпусе электродвигателя имеется табличка с техническими данными. Если ее нет, то можно самому рассчитать число оборотов вала оборудования по другим имеющимся данным. Расчет производится тремя способами.
- Расчет числа катушек, которое сравнивается с нормами для разного напряжения, следует по таблице:
- Расчет скорости работы по шагу диаметра обмотки по формуле:
2 p = Z1 / y, где 2р – количество полюсов, Z1 – число пазов в статоре, у – шаг обмотки.
Выбираем из таблицы подходящие обороты двигателя:
- Высчитываем количество полюсов по параметрам сердечника по формуле:
2p = 0,35 Z1 b / h или 2 p = 0,5 Di / h,
где 2р – количество полюсов, Z1 – число пазов, b – размер зуба, см, h – высота спинки, см, Di – диаметр по зубцам, см.
По результатам расчета и индукции следует число витков обмотки, сравнивается со значениями мотора по паспорту.
Принцип
Задачи частотника в системе частотного регулирования асинхронного электродвигателя:
- изменение показателей электродвигателя в автоматическом режиме через обработку сигналов с датчиков, установленных на периферии;
- приведение привода в действие, согласно настройкам (программируемый алгоритм работы по времени);
- поддержание функции автоматического восстановления первоначальных настроек работы в случаях кратковременных остановок (прерываний питания);
- удаленное управление переходными процессами с пульта;
- защита электродвигателя от перегрузок.
Принцип частотного регулирования асинхронного двигателя выражен в формуле:
Его суть: изменяя частоту f1 питающего напряжения, можно менять угловую скорость магнитного поля статора при неизменном количестве пар полюсов, обозначенных в формуле p. Такой метод обеспечивает оптимальные характеристики работы асинхронного электродвигателя, но и оптимальные показатели регулирования частоты:
- мягкое (плавное) регулирование скоростей в большом диапазоне частоты;
- повышенная жесткость механических показателей;
- регулирование частоты вращений вала без повышения скольжения электродвигателя (за счет чего потери мощности сводятся к предельному минимуму).
Одним из условий частотного регулирования скорости асинхронного двигателя является одновременное с частотой вращений изменение напряжения, которое к нему подводится. Это нужно для повышения энергетических показателей работы электропривода (КПД, коэффициенты мощности, способности выдерживать перегрузки).
Закон частотного регулирования асинхронного двигателя (закон напряжения) определяется типом момента нагрузки (обозначается как Мс).
- Когда Мс = const, напряжение на статоре регулируется пропорционально частоте вращения, согласно выражению:
- Если характер момента нагрузки – вентиляторный, то применяется выражение:
- Если момент нагрузки обратно пропорционален частоте:
Другими словами, для реализации поставленных перед ним задач (плавное бесступенчатое частотное регулирование частоты оборотов вала асинхронного электродвигателя) частотный преобразователь должен одновременно:
- менять частоту оборотов;
- регулировать на статоре напряжение.
Как изменить скорость работы двигателя?
Изменять скорость вращающего момента механизма оборудования можно различными способами, например, механическими редукторами с переключением передач, муфтами и другими устройствами. Но это не всегда возможно. Практически используется 7 способов коррекции частоты вращения регулируемых приводов. Все способы разделены на два основных направления.
- Коррекция магнитного поля путем воздействия на частоту тока, уменьшение или увеличение числа пар полюсов, коррекция напряжения. Направление характерно моторам с короткозамкнутым (КР) ротором.
- Скольжение корректируется напряжением питания, добавлением еще одного резистора в цепь схемы ротора, установкой двойного питания, использованием каскада вентилей. Такое направление используется для роторов с фазами.
Регулировка частоты и напряжения с помощью частотного преобразователя, путем создания дополнительной катушки с переключением полюсов пар, являются самыми востребованными способами.
Расчет асинхронного электродвигателя
Реферат
Ускорение научно-технического прогресса требует всемерной автоматизации производственных процессов. Для этого необходимо создать электрические машины, удовлетворяющие по своим показателям и характеристикам, весьма разнообразным требованиям различных отраслей народного хозяйства.
Процесс создания электрических машин включает в себя проектирование, изготовление и испытание. В настоящем курсовом проекте рассматриваются вопросы проектирования электрических машин.
Под проектированием электрических машин понимается, расчет размеров отдельных ее частей, параметров обмоток, рабочих и других характеристик машины, конструирование машины в целом, а также ее отдельных деталей и сборочных единиц, оценка технико-экономических показателей спроектированной машины, включая показатели надежности.
Основные тенденции в развитии электромашиностроения.
Усовершенствование методов расчета машин;
Улучшение конструкции машин с придачей узлам и деталям эстетических и рациональных форм, при обеспечении снижения их массы и прочности. Повышение надежности машин, в частности за счет широкого распространения машин закрытого исполнения, в которых для улучшения охлаждения используют обдув наружной поверхности.
Наиболее применяемые степени защиты:
IP22- машина, защищенная от попадания твердых тел размером более 12мм и от капель воды.
IP23- машина, защищенная от попадания твердых тел размером более 12мм и от дождя.
IP44- машина, защищенная от попадания твердых тел размером более 1мм и от водяных брызг (закрытая машина).
Энергетические показатели машин (КПД и cos) в основном сохраняются на одном уровне.
Особо следует отметить повышение технологичности конструкции, осуществляемой широкой унификацией узлов и деталей машин и придания им форм, содействующих возможности применения прогрессивных технологических процессов и усовершенствованного оборудования – автоматических линий, агрегатных станков полуавтоматов, конвейеров и др.
Введение
Асинхронные двигатели — наиболее распространенный вид электрических машин, потребляющих в настоящее время около 40% всей вырабатываемой электроэнергии. Их установленная мощность постоянно возрастает.
Потребности народного хозяйства удовлетворяются главным образом двигателями основного исполнения единых серий общего назначения, то есть применяемых для привода механизмов, не предъявляющих особых требований к пусковым характеристикам, скольжению, энергетическим показателям, шуму и т.п. Вместе с тем в единых сериях предусматривают также электрические и конструктивные модификации двигателей, модификации для разных условий окружающей среды, предназначенные для удовлетворения дополнительных специфических требований отдельных видов приводов и условий их эксплуатации. Модификации создаются на базе основного исполнения серий с максимально возможным использованием узлов и деталей этого исполнения.
В некоторых приводах возникают требования, которые не могут быть удовлетворены двигателями единых серий. Для таких приводов созданы специализированные двигатели, например электробуровые, краново-металлургические и др.
Электромашиностроение прошло большой путь развития, начиная от простейшей моделей, созданных полтора века назад на основе открытий М. Фарадея (1821- 1831), до современных электродвигателей и генераторов.
В настоящее время отечественной промышленностью изготовляются асинхронные двигатели мощностью от 0,12 до 400кВт единой серии 4А и мощностью свыше 400 до 1000 кВт – серии 4А, а также серии А1- мощностью от 0,04 до 315 кВт.
Новые серии разработаны с учетом международных норм- рекомендаций МЭК. В области асинхронных двигателей разработка серий проводилась в соответствии с согласованными общими рекомендациями по унифицированной увязки установочных размеров со шкалой мощностей.
1. Выбор главных размеров и расчёт обмотки статора
Расчёт асинхронных машин начинают с определения главных размеров: внутреннего диаметра статора
и расчётной длины воздушного зазора . Наиболее целесообразным является выбор главных размеров, основанный на предварительном определении высоты оси вращения и увязке этого размера с наружным диаметром статора и последующем расчёте внутреннего диаметра статора.
Высоту оси вращения h и соответствующий ей наружный диаметр статора
определяют по таблицам 1 и 2 приложения для заданных номинальной мощности, числа пар полюсов и исполнения двигателя: .
Внутренний диаметр статора
определяется: ,
где KD – коэффициент, определяется по таблице 3 приложения .
Полюсное деление, м:
Расчётная мощность, кВт:
где Р2 – мощность на валу двигателя, кВт;
kЕ – отношение ЭДС обмотки статора к номинальному напряжению, определяется по рисунку 1 приложения
Предварительные значения η и со sφ могут быть взяты по кривым приложения (рисунок 2 и 3), построенным по данным двигателей серии 4А.
Предварительный выбор электромагнитных нагрузок А , А/м и Вδ , Тл должен быть проведён особо тщательно, т.к. они определяют не только расчётную длину сердечника но и в значительной степени характеристики машины. Рекомендации по выбору А и Вδ, представленные в виде кривых на рисунках 4 и 5 приложения , основаны на данных изготовленных двигателей.
Коэффициент полюсного перекрытия αδ и коэффициент формы поля kв предварительно принимают равными:
Предварительное значение обмоточного коэффициента
выбирают в зависимости от типа обмотки статора. Для однослойных обмоток =0,95÷0,96; для двухслойных обмоток при 2р=2 принимают =0,90÷0,91, при 2р>2 =0,91÷0,92.
Расчётная длина воздушного зазора, м:
где Ω – синхронная угловая скорость вала двигателя, рад/с:
где
— синхронная частота вращения, об/мин; — частота питания, Гц.
Критерием правильности выбора главных размеров D и
служит отношение , которое должно находиться в пределах, показанных на рисунке 6 приложения для принятого исполнения машины. Если λ оказывается чрезмерно большим, то следует повторить расчёт для ближайшей из стандартного ряда большей высоты оси вращения h. Если λ слишком мало, то расчёт повторяют для следующей в стандартном ряду меньшей высоты h.
Для расчёта магнитной цепи помимо
необходимо определить полную конструктивную длину и длину стали сердечников статора ( и ) и ротора ( и ). В асинхронных двигателях, длина сердечников которых не превышает 250-300 мм, радиальных вентиляционных каналов не делают. Для такой конструкции ==. В более длинных машинах сердечники подразделяют на отдельные пакеты, разделённые между собой радиальными вентиляционными каналами.
Стандартная ширина радиального воздушного канала между пакетами
мм. Число пакетов и их длина связаны с расчётной длиной соотношением:
mirznanii.com
Распространенные схемы регуляторов
Существует множество частотных преобразователей для асинхронных двигателей, а также различных регуляторов для них. Самостоятельно возможно изготовить прибор для регулировки частоты, применяя транзисторы или тиристоры. Прибор работает как в быту, так и для станочного оборудования, крановых механизмов, различных регулируемых приводов агрегатов.
Мощный регулятор частоты и напряжения показан на схеме. Прибор плавно изменяет параметры привода, экономит энергию, снижает расходы на обслуживание.
Для применения этой схемы в быту, она сложная. Если использовать симистор рабочим элементом, то схема упрощается, и выглядит иначе.
Регулировка будет происходить работой потенциометра, определяюцим фазу импульса входа, и открывающего симистор.
Эффект эксплуатации станков, обрабатывающих металл, подъемных устройств также следует из вращения двигателя, как и сами его эксплуатационные параметры. В продаже имеется множество приборов для регулировки частоты, однако можно вполне собрать такой прибор собственными силами.
Как выбрать частотный преобразователь?
Если проанализировать цены и функции преобразователей частоты, то можно понять, что по цене определяется количество встроенных функции частотного преобразователя. Дорогие модели обладают большой функциональностью. Но для выбора прибора лучше руководствоваться требуемыми условиями применения.
- Частотники бывают с двумя видами управления: скалярное, векторное. При скалярном управлении прибор действует при определенных значениях выходной разности потенциалов и частотой, работают в примитивных домашних приборах, например, вентиляторах. При векторном управлении сила тока устанавливается достаточно точно.
- При выборе прибора параметры мощности играют определяющую роль. Величина мощности расширяет сферу использования, упрощает обслуживание.
- При выборе устройства учитывается интервал рабочего напряжения сети, что снижает опасность выхода его из строя из-за резких перепадов разности потенциалов. При чрезмерном повышении напряжения конденсаторы сети могут взорваться.
- Частота – немаловажный фактор. Его величина определяется требованиями производства. Наименьшее значение говорит о возможности использования скорости в оптимальном режиме работы. Для получения большего интервала частоты применяют частотники с векторным управлением. В реальности часто используются инверторы с интервалом частот от 10 до 10 Гц.
- Частотный преобразователь, имеющий много разных выходов и входов удобен в пользовании, но стоимость его выше, настройка сложнее. Разъемы частотников бывают трех типов: аналоговые, дискретные, цифровые. Связь обратного вида вводных команд производится через аналоговые разъемы. Цифровые клеммы производят ввод сигналов от датчиков цифрового типа.
- Выбирая модель частотного преобразователя, нужно дать оценку управляющей шине. Ее характеристика подбирается под схему инвертора, что обуславливает число колодок. Наилучшим выбором работает частотник с запасом количества разъемов для дальнейшей модернизации прибора.
- Частотники, выдерживающие большие перегрузки (на 15% выше мощности мотора), при выборе имеют предпочтения. Чтобы не ошибиться при покупке преобразователя частоты, ознакомьтесь с инструкцией. В ней имеются главные параметры эксплуатации оборудования. Если нужен прибор для максимальных нагрузок, то необходимо выбирать частотник, сохраняющий ток на пике работы выше, чем на 10% от номинала.
Чем вредна высокая частота вращения коленвала?
Манера езды «тапку в пол» подразумевает постоянное раскручивание коленчатого вала до 5–8 тыс. оборотов за минуту и позднее переключение скоростей, когда от шума двигателя буквально звенит в ушах. Чем чреват данный стиль вождения, кроме создания аварийных ситуаций на дороге:
- все узлы и агрегаты автомобиля, а не только мотор, испытывают максимальные нагрузки в течение срока эксплуатации, что снижает общий ресурс на 15–20%;
- из-за интенсивного нагрева двигателя малейший сбой охлаждающей системы ведет к капитальному ремонту вследствие перегрева;
- трубы выхлопного тракта прогорают значительно быстрее, а вместе с ними – дорогостоящий катализатор;
- ускоренно изнашиваются элементы трансмиссии;
- поскольку частота вращения коленвала превышает нормальные оборотычуть ли не вдвое, расход горючего тоже увеличивается в 2 раза.
Эксплуатация автомобиля «на разрыв» имеет дополнительный негативный эффект, связанный с качеством дорожного покрытия. Движение на большой скорости по неровным дорогам буквально убивает элементы подвески, причем в кратчайшие сроки. Достаточно влететь колесом в глубокую выбоину – и передняя стойка согнется либо треснет.
Общее техническое состояние автомобиля, в том числе его двигателя, системы охдаждения, трансмиссии и многое другое, всегда можно проверить с помощью персонального ODB-II автосканера. Одним из лучших представителей данного рода устройств является сканер корейской сборки Scan Tool Pro Black Edition.
Помимо точной диагностики всех узлов и агрегатов автомобиля, автосканер способен в режиме реального времени отображать обороты, давление масла, показания со всех датчиков и т.д. Сканер совместим с большинством автомобилей имеющих ODB-II разъём и довольно прост в эксплуатации. Информацию о состоянии вашего авто всегда можно вывести на любое устройство под управлением iOS, android или windows.
Как подключить частотный преобразователь
Если кабель для подключения на 220 В с 1-й фазой, применяется схема «треугольника». Нельзя подключать частотник, если выходной ток выше 50% от номинального значения.
Если кабель питания на три фазы 380 В, то делается схема «звезды». Чтобы проще было подключать питание, предусмотрены контакты и клеммы с буквенными обозначениями.
- Контакты R, S, T предназначены для подключения сети питания по фазам.
- Клеммы U , V , W служат соединением электродвигателя. Для реверса достаточно изменить подключение двух проводов между собой.
В приборе должна быть колодка с клеммой подключения к земле. Подробней, как подключить, здесь.
Как обслуживать частотные преобразователи?
Для долгосрочной эксплуатации инвертора требуется контроль за его состоянием и выполнение предписаний по обслуживанию:
- Очищать от пыли внутренние элементы. Можно использовать компрессор для удаления пыли сжатым воздухом. Пылесос для этих целей не подходит.
- Периодически контролировать состояние узлов, производить замену. Срок службы электролитических конденсаторов составляет пять лет, предохранительных вставок – десять лет. Охлаждающие вентиляторы работают до замены 3 года. Шлейфы проводов используются шесть лет.
- Контроль напряжения шины постоянного тока и температура механизмов является необходимым мероприятием. При повышенной температуре термопроводящая паста засыхает и выводит из строя конденсаторы. Каждые 3 года на силовые клеммы наносят слой токопроводящей пасты.
- Условия и режим работы необходимо соблюдать в строгом соответствии. Температура окружающей среды не должна превышать 40 градусов. Пыль и влажность отрицательно влияют на состояние рабочих элементов прибора.
Окупаемость преобразователя частоты
Электроэнергия постоянно дорожает, руководители организаций вынуждены экономить разными путями. В условиях промышленного производства большая часть энергии расходуется механизмами, имеющими электродвигатели.
Изготовители устройств для электротехнических машин и агрегатов предлагают специальные устройства и приборы для управления электромоторами. Такие устройства экономят энергию электрического тока. Они называются инверторами или частотными преобразователями.
Финансовые затраты на покупку частотника не всегда оправдывают экономию средств, так как стоимость их сопоставима со стоимостью сэкономленной энергии. Не всегда привод механизма можно быстро оснастить инвертором. Какие сложности при этом возникают? Разберем способы запуска асинхронных двигателей для пониманию достоинств инверторов.
Правила регулирования частоты
Максимум новой частоты зависит от ее механических свойств. На более высокой частоте вращения по отношению к номинальной асинхронные электродвигатели выдают лучшие энергетические показатели, чем на более низкой. Поэтому в системах с редуктором полезно осуществлять регулирование с изменением частоты и вниз, и (особенно) вверх вплоть до максимума, который зависит от механической прочности ротора.
При этом важно учитывать следующее правило. При повышении количества оборотов вала относительно паспортных данных электродвигателя частота его источника питания не должна увеличиваться более, чем в 1,5–2 раза от номинальной.
Такой метод управления – частотное регулирование асинхронного двигателя – более всего оправдывает себя в механизмах и короткозамкнутым ротором. В случае с ним ввиду отсутствия скольжения потери мощности остаются минимальными, а выходные механические характеристики – с высокой жесткостью.