Зависимость частоты от числа пар полюсов
При рассмотрении вопроса о получении переменного тока указывают, что за один оборот ротора индуктированная в проводниках обмотки генератора электродвижущая сила (ЭДС) имела один период. Если ротор генератора делает, например 5 об/сек, то ЭДС будет иметь 5 пер/сек или частота тока генератора будет равна 5 Гц. Следовательно, число оборотов в секунду ротора генератора численно равно частоте тока.
Частота тока f выражается следующим соотношением:
где n – число оборотов ротора в минуту.
Для получения от генератора стандартной частоты тока – 50 Гц ротор должен делать 3000 об/мин, то есть
Однако наши рассуждения были справедливы только для двухполюсного генератора, то есть для машины с одной парой полюсов p.
Если машина четырехполюсная, то есть число пар полюсов равно двум: p = 2 (рисунок 1), то один полный период изменения тока будет иметь место за пол-оборота ротора (1 – 5 положения проводника на чертеже). За второй полуоборот ротора ток будет иметь еще один период. Следовательно, за один оборот ротора четырехполюсной машины ток в проводнике имеет два периода. В шестиполюсной машине (p = 3) ток в проводнике за один оборот ротора будет иметь три периода.
Рисунок 1. Изменение переменного тока в проводнике ротора четырехполюсного генератора
Таким образом, для машин, имеющих p пар полюсов, частота тока при
об/сек будет в p раз больше, чем для двухполюсной машины, то есть
Отсюда формула зависимости скорости вращения от частоты и числа пар полюсов будет иметь следующий вид:
Пример 1. Определить частоту переменного тока, получаемого от генератора с восемью полюсами (p = 4), скорость вращения ротора которого n = 750 об/мин. Подставляя в формулу для определения частоты тока значение p и n получим:
Пример 2. Определить скорость вращения ротора двадцатиполюсного генератора (p = 10), если частотомер показал частоту тока f = 25 Гц. Подставляя в формулу для определения числа оборотов ротора n значения p и f, получим:
Пример 3. Скорость вращения ротора асинхронного двигателя, составляет 250 об/мин. Определить число пар полюсов асинхронного двигателя, если частота тока питающей сети равна 50 Гц:
Следовательно, двигатель имеет 24 полюса.
Источник: Кузнецов М. И., «Основы электротехники» — 9-е издание, исправленное — Москва: Высшая школа, 1964 — 560 с.
www.electromechanics.ru
Способы определения характеристик электромотора
Чтобы определить, к какой из этих групп относится двигатель, не нужно разбирать его, как это советуют некоторые специалисты, чтобы обеспечить себе заказ на работу. Дело в том, что разбор электродвигателя может осуществить только мастер достаточной квалификации. На самом же деле достаточно открыть защитную крышку (другое название подшипниковый щит) и найти катушку обмотки. Таких катушек может быть несколько, но достаточно одной. В случае если к валу прикреплены полумуфта или шкив, потребуется снять еще и нижний щит.
Если катушки соединены при помощи деталей, которые мешают рассмотреть информацию, эти детали ни в коем случае нельзя отсоединять. Нужно попробовать определить на глаз соотношение размера катушки и статора.
Статором называется неподвижная часть электромотора, подвижная же имеет название ротор. В зависимости от конструктивных особенностей, в качестве ротора может выступать как сама катушка, так и магниты.
Если катушка закрывает собой половину кольца статора, такой двигатель относится к третьей группе, то есть способен выдавать до 3000 оборотов. Если размер катушки составляет треть от размеров кольца, это мотор второго типа, соответственно, он способен развить 1500 оборотов в минуту. Наконец, если катушка только на четверть закрывает собой кольцо, это первый тип. Электромотор развивает мощность в 1000 оборотов.
Существует еще один способ определения частоты вращения вала роторной части. Для этого также нужно снять крышку и найти верхнюю часть обмотки. По расположению секций обмотки и определяется скорость. Обычно внешняя секция занимает 12 пазов. Если сосчитать общее количество пазов и разделить на 12, можно получить число полюсов. Если число полюсов равно 2, двигатель имеет скорость вращения около 3000 об/мин. Если полюсов получилось 4, это соответствует 1500 оборотам в минуту. Если 6, то 1000 об/мин. Если 8, то 700 оборотов.
Третий способ определения количества оборотов внимательно осмотреть бирку на самом двигателе. Цифра на маркировке в конце и соответствует числу полюсов. Например, для маркировки АИР160S6 последняя цифра 6 указывает, сколько полюсов использует катушка.
Проще же всего измерить число оборотов специальным прибором тахометром. Но в силу узкой специализации применения данный способ нельзя рассматривать как общедоступный. Таким образом, даже если не сохранилось никакой технической документации, существует как минимум 4 способа определить число оборотов электрического мотора.
трехфазный асинхронный электродвигатель | электрика для начинающих
скольжение
Частоты вращения ротора и электромагнитного поля статора трехфазного асинхронного электродвигателя не совпадают, поэтому он назван асинхронным. Разница в отставании называется скольжением и выражается формулой s=(nc-nr)/nc, где nc — частота вращения поля статора, nr — частота вращения ротора. На бирке двигателя указывают именно число оборотов ротора. Например, на бирке читаем: 960 об/мин. Значит, синхронная частота вращения поля статора — 1000 об/мин. Значение скольжения не постоянно и зависит от нагрузки двигателя. Про скольжение на практике можно забыть, а вот про частоту вращения подробнее.
синхронная частота вращения магнитного поля статора
Скорость вращения магнитного поля статора не изменяется (синхронна), она рассчитывается по формуле nc=60f/p, f — частота переменного тока (50 Гц), p — число пар полюсов. Трехфазный асинхронный электродвигатель может быть на 3000, 1500, 1000, 750 оборотов в минуту (даже на 500 бывает) — все зависит от числа пар полюсов. Помните магнит на уроке физики? У него есть два полюса — северный (синий) и южный (красный). Так и у обмотки двигателя есть два полюса: одна половина обмотки намотана на одной стороне статора, другая половина — на противоположной. Эти две половинки, составляющие единую фазную обмотку, и называются парой полюсов.Но обмотка может равномерно разделиться по пазам статора не пополам, а на 4 части, тогда получатся 2 пары полюсов, на 6 частей — 3 пары и т.д.Обращаю внимание: не путать число пар полюсов с числом полюсов. Число полюсов — это количество тех частей, на которые разделена обмотка.Исходя из формулы nc=60f/p, видим, что трехфазный асинхронный электродвигатель с 4 парами полюсов (обмотка разделена на 8 частей) рассчитан на 750 об/мин. (nc=60*50/4=750), а с 2 парами (обмотка разделена на 4 части) — 1500 об/мин.В обозначении марки трехфазного асинхронного электродвигателя указано количество частей, на которые разделена каждая обмотка. Если на бирке невозможно прочитать количество об/мин., обозначение марки поможет. Например, марка АИР-С100МА6БУ3 после обозначения габаритных и установочных размеров 100МА имеет цифру 6. Значит, обмотка разделена на 6 частей (3 пары полюсов). Отсюда делаем вывод: двигатель рассчитан на 1000 об/мин.Многоскоростные электродвигатели обозначаются числом полюсов (числом частей обмотки) таким образом: АИР-С100МА6/4/2БУ3, то есть три скорости: 1000 об/мин.(цифра 6), 1500 об/мин.(4) и 3000 об/мин.(2).Если неизвестна синхронная частота вращения магнитного поля статора, придется открыть крышку и посчитать число полюсов или замерить скорость вращения ротора тахометром, принимая во внимание скольжение.
определение мощности и номинального тока
Часто на бирке стираются значения мощности и номинального тока. Как их определить?Придется подключить к сети и токоизмерительными клещами замерить фазный ток. Нет необходимости подключать нагрузку, достаточно определить ток холостого хода и по таблице 1 вычислить номинальный ток. В таблице указан ток холостого хода в процентах от номинального.
Таблица 1
Затем применяем формулу мощности трехфазного асинхронного электродвигателя P=√3UIcosφη и определяем мощность с помощью таблицы 2.
Таблица 2
Например, замер тока холостого хода показал 5,5 А. Двигатель на 1500 об/мин. и по размерам соответствует мощности от 1,1 до 5 кВт. Определяем номинальный ток, исходя из того, что холостой ход этих двигателей составляет 65% от номинального: 5,5 А/0,65=8,46 А (помните математику: нахождение целого числа по его процентной части). Далее обращаемся к формуле мощности P=√3UIcosφη. Сosφ выбираем приблизительно — 0,85, кпд — 0,85 (таблица 2). Р=1,73*380*8,46*0,85*0,85=4018 Вт. Следует учесть, что получили мощность на валу, а потребляемая активная мощность рассчитывается по этой же формуле, но только без кпд. При определении полной мощности надо исключить еще и cosφ.Так как расчет был приблизительным, можно предположить, что двигатель, скорее всего, 4 или 4,5 кВт. Этот пример я, конечно, выдумал, поэтому и результат выдуманный. Главное, понять алгоритм определения неизвестных параметров трехфазного асинхронного электродвигателя.
electriku.ru
Электродвигатели в составе мотор-редукторов
Электрические двигатели уже давно стали включаться в состав различных мотор-редукторов. Они находят свое применение как в трёхступенчатых типа МЦ3У. так и в двухступенчатых типа МЦ2У. Электромоторы имеют практически 90%-ный коэффициент полезного действия, не требуют постоянного обслуживания. Немаловажным параметром является и исключительная экологичность электрического мотора, вредные выхлопы отсутствуют вовсе, что делает его незаменимым при установке внутри помещения. Словом, в настоящее время электромоторы признаны в 3, а то и в 4 раза эффективнее традиционных двигателей внутреннего сгорания.
Но иногда, в случае выхода из строя электродвигателя, покупатель узнает, что абсолютно никакой сопроводительной документации к нему не прилагается. Маркировочные шильды, если и сохранились, могут находиться в изношенном потертом состоянии, так, что ничего на них рассмотреть попросту бывает невозможно. Как же в таком случае можно определить мощность двигателя и число его оборотов? Здесь поэтапно будут приведены советы, которые помогут это сделать.
Следует иметь в виду, что под числом оборотов подразумевается так называемая асинхронная скорость. Синхронная скорость это скорость вращения магнитного поля. Асинхронная скорость несколько ниже синхронной из-за наличия массы у вращательного элемента, а также воздействия сил трения, которые могут значительно понизить КПД мотора. Впрочем, на практике эти различия практически никогда не имеет решающего значения.
Сейчас на рынке представлено 3 основные категории асинхронных электродвигателей. Первая категория каталога – моторы, работающие при 1000 оборотах. На практике это число составляет порядка 950-970 оборотов, но для наглядности все-таки округляют до тысячи. Вторая категория моторы, выдающие 1500 об/мин. Это также округлено, так как в действительности диапазон лежит в пределах 1430-1470. Третья 3000 оборотов в минуту. Хотя реально такой мотор выдает 2900-2970 вращений.
Принцип работы электродвигателей
Принцип работы электродвигателей. Основные понятия.
Магнетизм
Наиболее характерное магнитное явление — притяжение магнитом кусков железа — известно со времен глубокой древности. Ещё одной очень важной особенностью магнитов является наличие у них полюсов: северного (отрицательного) и южного (положительного). Противоположные полюса притягиваются, а одинаковые — отталкиваются друг от друга.
Магнитное поле
Магнитное поле можно условно изобразить линиями в виде магнитного потока, движущегося от северного полюса к южному. В некоторых случаях определить, где северный, а где южный полюс, достаточно сложно.
Электромагнетизм
Вокруг проводника, при пропускании по нему электрического тока, создаётся магнитное поле. Это явление называется электромагнетизмом. Физические законы одинаковы для магнетизма и электромагнетизма.
Магнитное поле вокруг проводников можно усилить, если намотать их на катушку со стальным сердечником. Когда проводник намотан на катушку, все линии магнитного потока, образуемого каждым витком, сливаются и создают единое магнитное поле вокруг катушки.
Чем больше витков на катушке, тем сильнее магнитное поле. Это поле имеет такие же характеристики, что и естественное магнитное поле, а, следовательно, у него тоже есть северный и южный полюса.
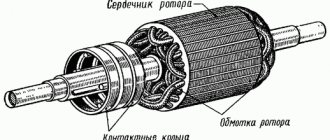
Вращение вала электродвигателя обусловлено действием магнитного поля. Основные части электродвигателя: статор и ротор.
Ротор:
Подвижная часть электродвигателя, которая вращается с валом электродвигателя, двигаясь вместе с магнитным полем статора.
Статор:
Неподвижный компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.
Вращение под действием магнитного поля
Преимуществом магнитных полей, которые создаются токопроводящими катушками, является возможность менять местами полюса магнита посредством изменения направления тока. Именно эта возможность смены полюсов и используется для преобразования электрической энергии в механическую.
Одинаковые полюса магнитов отталкиваются друг от друга, противоположные полюса — притягиваются. Можно сказать, что это свойство используется для создания непрерывного движения ротора с помощью постоянной смены полярности статора. Ротором здесь, является магнит, который может вращаться.
Чередование полюсов с помощью переменного тока
Чередование полюсов с помощью переменного тока
Полярность постоянно меняется с помощью переменного тока (AC). Далее мы увидим, как ротор заменяется магнитом, который вращается под действием индукции. Здесь важную роль играет переменный ток, поэтому будет полезно привести здесь краткую информацию о нём:
Переменный ток — AC
Под переменным током понимается электрический ток, периодически изменяющий свое направление в цепи так, что среднее значение силы тока за период равно нулю. Вращающееся магнитное поле можно создать с помощью трёхфазного питания. Это означает, что статор подсоединяется к источнику переменного тока с тремя фазами. Полный цикл определяется как цикл в 360 градусов. Это значит, что каждая фаза расположена по отношению к другой под углом в 120 градусов. Фазы изображаются в виде синусоидальных кривых, как представлено на рисунке.
Трёхфазный переменный ток
Трёхфазное питание — это непрерывный ряд перекрывающихся напряжений переменного тока (AC).
Смена полюсов
На следующих страницах объясняется, как взаимодействуют ротор и статор, заставляя электродвигатель вращаться.
Для наглядности мы заменили ротор вращающимся магнитом, а статор — катушками. В правой части страницы приведено изображение двухполюсного трёхфазного электродвигателя. Фазы соединены парами: 1-й фазе соответствуют катушки A1 и A2, 2-й фазе — B1 и B2 , а 3-й соответствуют C1 и C2. При подаче тока на катушки статора одна из них становится северным полюсом, другая — южным. Таким образом, если A1 — северный полюс, то A2 — южный.
Питание в сети переменного тока
Обмотки фаз A, B и C расположены по отношению друг к другу под углом в 120 градусов.
Количество полюсов электродвигателя определяется количеством пересечений поля обмотки полем ротора. В данном случае каждая обмотка пересекается дважды, что означает, что перед нами двухполюсный статор. Таким образом, если бы каждая обмотка появлялась четыре раза, это был бы четырехполюсный статор и т.д.
Когда на обмотки фаз подаётся электрический ток, вал электродвигателя начинает вращаться со скоростью, обусловленной числом полюсов (чем меньше полюсов, тем ниже скорость)
Вращение ротора
Ниже рассказывается о физическом принципе работы электродвигателя (как ротор вращается внутри статора). Для наглядности, заменим ротор магнитом. Все изменения в магнитном поле происходят очень быстро, поэтому нам необходимо разбить весь процесс на этапы. При прохождении трёхфазного переменного тока по обмоткам статора в нем создается магнитное поле, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля.
Начав вращение, магнит будет следовать за меняющимся магнитным полем статора. Поле статора меняется таким образом, чтобы поддерживалось вращение в одном направлении.
Индукция
Ранее мы установили, как обыкновенный магнит вращается в статоре. В электродвигателях переменного тока AC установлены роторы, а не магниты. Наша модель очень схожа с настоящим ротором, за исключением того, что под действием магнитного поля ротор поляризуется. Это вызвано магнитной индукцией, благодаря которой в проводниках ротора наводится электрический ток.
Индукция
В основном ротор работает так же, как магнит. Когда электродвигатель включен, ток проходит по обмотке статора и создаёт электромагнитное поле, которое вращается в направлении, перпендикулярном обмоткам ротора. Таким образом, в обмотках ротора индуцируется ток, который затем создаёт вокруг ротора электромагнитное поле и поляризацию ротора.
В предыдущем разделе, чтобы было проще объяснить принцип действия ротора, заменив его для наглядности магнитом. Теперь заменим магнитом статор. Индукция — это явление, которое наблюдается при перемещении проводника в магнитном поле. Относительное движение проводника в магнитном поле приводит к появлению в проводнике так называемого индуцированного электрического тока. Этот индуцированный ток создаёт магнитное поле вокруг каждой обмотки проводника ротора. Так как трёхфазное AC питание заставляет магнитное поле статора вращаться, индуцированное магнитное поле ротора будет следовать за этим вращением. Таким образом вал электродвигателя будет вращаться. Электродвигатели переменного тока часто называют индукционными электродвигателями переменного тока, или ИЭ (индукционными электродвигателями).
Принцип действия электродвигателей
Индукционные электродвигатели состоят из ротора и статора.
Токи в обмотках статора создаются фазовым напряжением, которое приводит в движение индукционный электродвигатель. Эти токи создают вращающееся магнитное поле, которое также называется полем статора. Вращающееся магнитное поле статора определяется токами в обмотках и количеством фазных обмоток.
Вращающееся магнитное поле формирует магнитный поток. Вращающееся магнитное поле пропорционально электрическому напряжению, а магнитный поток пропорционален электрическому току.
Вращающееся магнитное поле статора движется быстрее ротора, что способствует индукции токов в обмотках проводников роторов, в результате чего образуется магнитное поле ротора. Магнитные поля статора и ротора формируют свои потоки, эти потоки будут притягиваться друг к другу и создавать вращающий момент, который заставляет ротор вращаться. Принципы действия индукционного электродвигателя представлены на иллюстрациях справа.
Таким образом, ротор и статор являются наиболее важными составляющими индукционного электродвигателя переменного тока. Они проектируются с помощью САПР (системы автоматизированного проектирования). Далее мы подробнее поговорим о конструкции ротора и статора.
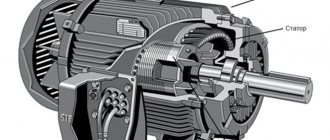
Статор элетродвигателя
Статор — это неподвижный электрический компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых всё время меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.
Все статоры устанавливаются в раму или корпус. Корпус статора электродвигателей Grundfos для электродвигателей мощностью до 22 кВт чаще всего изготавливается из алюминия, а для электродвигателей с большей мощностью — из чугуна. Сам статор устанавливается в кожухе статора. Он состоит из тонких пластин электротехнической стали, обмотанных изолированным проводом. Сердечник состоит из сотен таких пластин. При подаче питания переменный ток проходит по обмоткам, создавая электромагнитное поле, перпендикулярное проводникам ротора. Переменный ток (AC) вызывает вращение магнитного поля.
Изоляция статора должна соответствовать требованиям IEC 62114, где приведены различные классы защиты (по уровням температуры) и изменения температуры (AT). Электродвигатели Grundfos имеют класс защиты F, а при увеличении температуры — класс B. Grundfos производит 2-полюсные электродвигатели мощностью до 11 кВт и 4-полюсные электродвигатели мощностью до 5,5 кВт. Более мощные электродвигатели Grundfos закупает у других компаний, уровень качества продукции которых соответствует принятым в Grundfos стандартам. Для насосов, в основном, используются статоры с двумя, четырьмя и шестью полюсами, так как частота вращения вала электродвигателя определяет давление и расход насоса. Можно изготовить статор для работы с различными напряжениями, частотами и мощностями на выходе, а также для переменного количества полюсов.
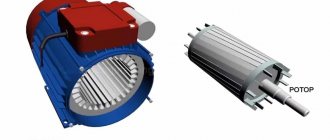
Ротор элетродвигателя
В электродвигателях используются так называемые «беличьи колеса» (короткозамкнутые роторы), конструкция которых напоминает барабаны для белок.
При вращении статора магнитное поле движется перпендикулярно обмоткам проводников ротора; появляется ток. Этот ток циркулирует по обмоткам проводников и создаёт магнитные поля вокруг каждого проводника ротора. Так как магнитное поле в статоре постоянно меняется, меняется и поле в роторе. Это взаимодействие и вызывает движение ротора. Как и статор, ротор изготовлен из пластин электротехнической стали. Но, в отличие от статора, с обмотками из медной проволоки, обмотки ротора выполнены из литого алюминия или силумина, которые выполняют роль проводников.
Асинхронные электродвигатели
В предыдущих разделах мы разобрали, почему электродвигатели переменного тока называют также индукционными электродвигателями, или электродвигателями типа «беличье колесо». Далее объясним, почему их ещё называют асинхронными электродвигателями. В данном случае во внимание принимается соотношение между количеством полюсов и числом оборотов, сделанных ротором электродвигателя.
Частоту вращения магнитного поля принято считать синхронной частотой вращения (Ns). Синхронную частоту вращения можно рассчитать следующим образом: частота сети (F), умноженная на 120 и разделенная на число полюсов (P).
Если, например, частота сети 50 Гц, то синхронная частота вращения для 2-полюсного электродвигателя равна 3000 мин-1.
Синхронная частота вращения уменьшается с увеличением числа полюсов. В таблице, приведенной ниже, показана синхронная частота вращения для различного количества полюсов.
Синхронная частота вращения для различного количества полюсов
| Число полюсов | Синхронная частота вращения 50 Гц | Синхронная частота вращения 60 Гц |
| 2 | 3000 | 3600 |
| 4 | 1500 | 1800 |
| 6 | 1000 | 1200 |
| 8 | 750 | 900 |
| 12 | 500 | 600 |
Скольжение элетродвигателя
Теперь мы уже знаем, что электродвигатели переменного тока называют асинхронными, потому что движущееся поле ротора отстает от поля статора.
В электродвигателях переменного тока вращающий момент возникает в результате взаимодействия между ротором и вращающимся магнитным полем статора. Магнитное поле обмоток ротора будет стремиться к тому, чтобы приблизиться к магнитному полю статора, как это было описано раньше. Во время работы частота вращения ротора всегда ниже частоты вращения магнитного поля статора. Таким образом, магнитное поле ротора может пересекать магнитное поле статора и создавать вращающий момент. Эта разница в частоте вращения полей ротора и статора называется скольжением и измеряется в %. Скольжение необходимо для создания вращающего момента. Чем больше нагрузка, а, следовательно, и вращающий момент, тем больше скольжение.
www.eti.su
Полюса электродвигателя
Электродвигатель постоянного тока – устройство, преобразующее электрическую энергию в механическую. Принцип работы такого электродвигателя основан на вращении магнитного поля.
Число пар полюсов электродвигателя
- Число пар полюсов электродвигателя определяет скорость, с которой будет вращаться вал мотора. Расчет производится с использованием специальных формул. При предельно допустимой нагрузке скорость вращения может незначительно замедлиться из-за скольжения. Скорость скольжения также рассчитывается при использовании соответствующих формул.
- Для работы синхронного электродвигателя необходимо обеспечить равное количество численности полюсов и рабочей обмотки. То же относится и к асинхронному электродвигателю.
- Причем короткозамкнутый ротор в асинхронном электродвигателе может отлично работать и при разном числе полюсов статорной обмотки.
- Асинхронный электродвигатель Доливо-Добровольского на полюсах статора имеет три обмотки. Внутри статора закреплен ротор. Три полюса магнитного тока могут создавать соответствующее вращение, если обмотки соединить особым образом и подключить мотор к трехфазной сети.
- На внутреннем кольце полюса, который обращен к ротору, суммарный магнитный поток перенаправится от полюса второй катушки к полюсу третьей катушки.
- Соответственно суммарный магнитный поток может менять свое направление, если изменить направление тока в обмотке статора, или полюсов. В результате получится асинхронный электродвигатель.
Доверяйте все работы профессионалам
Если Вы купили электродвигатель, его монтажом, техническим обслуживанием или ремонтом могут заниматься только специалисты с соответствующим уровнем технической подготовки.
Менять самостоятельно обмотку или заменять потоки направляющей энергии в полюсах нельзя. Вы автоматически потеряете гарантию производителя и последующий ремонт, возможно капитальный, будете проводить за свой счет.
Производители электродвигателей предлагают потребителям огромный ассортимент электродвигателей с разной мощностью и скоростью вращения вала. Из такого разнообразия, наверняка, можно выбрать электродвигатель, который будет полностью соответствовать Вашим требованиям, и выполнять поставленные задачи.
При покупке электродвигателя в Вы можете получить консультацию продавца по подбору электродвигателя с любым количеством полюсов по тел..
Дата: Воскресенье, 15 Декабрь 2013
www.rosdiler-electro.ru
8.7. Регулирование скорости асинхронного двигателя изменением числа пар полюсов
Этот способ регулирования скорости может быть реализован только при использовании специальных АД, получивших название многоскоростных. Особенность этих АД в том, что их статорная обмотка состоит из двух одинаковых секций (полуобмоток). За счет разных схем их соединения может быть изменено число пар полюсов
АД. В соответствии с формулой
это позволяет изменять скорость вращения магнитного поля
и тем самым регулировать скорость АД. Ротор многоскоростных АД обычно выполняется короткозамкнутым.
Так как число пар полюсов АД может принимать только дискретные значения (
= 1, 2, 3, 4…), то и скорость АД этим способом может регулироваться лишь ступенчато [1].
Рассмотрим принцип получения различного числа пар полюсов при переключении секций обмотки статора на следующем примере.
Пусть фаза статорной обмотки состоит из двух одинаковых секций 1н – 1к, 2н – 2к, имеющая каждая по два проводника (рис. 8.17а) и соединенных последовательно и согласно. По обмотке статора протекает ток, имеющий в данный момент времени показанное стрелками направление. Используя правило буравчика, определим направление магнитных силовых линий, создаваемых протекающим по проводникам током I. Не трудно заметить, что магнитное поле имеет в этом случае четыре полюса или
= 2.
а) б) в)
Рис. 8.17. Схемы соединений секций обмотки статора для изменения числа пар полюсов АД
Изменим теперь схему соединения секций, включив их последовательно и встречно (рис. 8.17б), оставив то же направление подводимого к обмотке тока. В этом случае статорная обмотка образует уже магнитное поле с вдвое меньшим числом пар полюсов. Уменьшение вдвое числа пар полюсов достигается и в схеме (рис. 8.17в), где секции соединены параллельно.
В этом и другом случае уменьшение числа пар полюсов достигается изменением направления тока на противоположное в одной из секций (в данном случае во второй). При этом диапазон изменения скорости вращения магнитного поля равен двум.
Наиболее часто на практике применяются две схемы переключений статорной обмотки многоскоростных АД: с треугольника (Д) на двойную звезду (УУ) и со звезды (У) на двойную звезду (УУ).
Рассмотрим схемы соединения статора и механические характеристики АД для этих случаев.
Треугольник – двойная звезда. Для получения большего числа пар полюсов
секции каждой фазы статора включены последовательно и согласно и соединены в треугольник (рис. 8.18а).
и
– начала соответственно первой и второй секций фазы
;
и
– их концы (обозначения для выводов фаз
и
аналогичны). Соединение секций по схеме (рис. 8.18б) аналогично схеме (рис. 8.17в) и вызовет уменьшение в 2 раза числа пар полюсов
АД. Схема на рисунке 8.18б, в которой фазы статора образованы двумя параллельно включенными секциями, получила название двойной звезды.
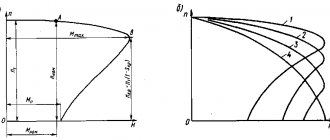
Механические характеристики АД для схем соединения обмоток в треугольник 2 и двойную звезду 1 показаны на рисунке 8.18в [2,4].
а) б) в)
Рис. 8.18. Схемы соединения обмоток статора в треугольник (а), двойную звезду (б) и механические характеристики при этих схемах (в)
Звезда – двойная звезда. В этом варианте низкая скорость (большее число пар полюсов
) получается в схеме одинарной звезды (рис. 8.19а).
а) б)
Рис. 8.19. Схема соединения обмоток статора в звезду (а) и механические характеристики двигателя при схемах соединения обмоток звезда и двойная звезда (б)
Переключение на двойную звезду осуществляется по схеме (рис. 8.18б), при этом число пар полюсов
уменьшится вдвое. Получаемые механические характеристики при соединении обмоток в звезду 2 и двойную звезду 1 двухскоростного АД изображены на рисунке 8.19б [2,4].
Помимо рассмотренных двухскоростных АД применяются также трех- и четырехскоростные. Первые из них помимо переключаемой обмотки статора, выполняемой аналогично рассмотренной выше, имеют также одну непереключаемую обмотку. Четырехскоростные АД имеют две переключаемые обмотки статора с числом пар полюсов
,
,
и позволяют получить четыре регулировочные механические характеристики.
Рассматриваемый способ регулирования скорости АД характеризуется рядом положительных показателей, что определяет широкое его применение в регулируемом ЭП переменного тока. К ним в первую очередь следует отнести экономичность, так как регулирование скорости не сопровождается выделением в роторной цепи дополнительных потерь энергии, вызывающих излишний нагрев АД и ухудшающих его КПД.
Механические характеристики многоскоростных АД отличаются хорошей и достаточной перегрузочной способностью.
Схему переключения «звезда – двойная звезда» целесообразно применять при постоянном моменте нагрузки
, схему «треугольник – двойная звезда» – при нагрузке ЭП, имеющей характер постоянной мощности.
Недостатком рассмотренного способа является ступенчатость изменения скорости двигателя, относительно небольшой диапазон ее регулирования, не превышающий обычно 6–8, и увеличенный габарит двигателя.
studfiles.net
Регулирование скорости изменением числа пар полюсов — Help for engineer
Регулирование скорости изменением числа пар полюсов
Регулирование скорости изменением числа пар полюсов стало возможным из-за секционной конструкции статора асинхронного двигателя с короткозамкнутым ротором. На практике выпускаются 2-х, 3-х, 4-х скоростные асинхронные двигатели, где число пар полюсов всегда кратно целому числу, вследствие чего, данный способ обеспечивает только ступенчатое регулирования скорости, а двигатели получили название многоскоростные. На деле существует большое количество схем включения обмоток статора, но наиболее часто используемые:
— переключение обмотки треугольник-двойная звезда; — переключение обмотки звезда-двойная звезда.
Треугольник-двойная звезда
Рисунок 1 – Схема переключения треугольник-двойная звезда
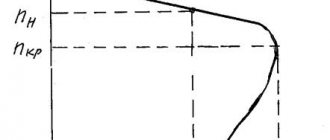
Рисунок 2 – Механическая характеристика при переключение с треугольника на двойную звезду
А — треугольник; Б — двойная звезда.
Данный тип регулирования скорости, в частных случаях осуществляет переключение скорости с некоторой временной рекуперацией энергии. Этот способ переключения занял нишу в грузоподъемных механизмах. Вы можете видеть, что при увеличении числа пар полюсов, скорость падает вдвое, но критический момент возрастает тоже в два раза, что дает нам возможность осуществлять подъем, но с более медленной скоростью. Называют такое условие работы – «тяговый» режим.
Сравнивая мощности, видно, что мощность изменяется незначительно, а скорость ступенчатым образом изменяется вдвое.
Рассматривая подробнее механическую характеристику при таком переключении, мы можем заметить, что работая в точке 1, кривая А, при включении на схему двойная звезда, асинхронный двигатель перейдет в точку 2 кривая Б, и начнет происходить рекуперативное торможение, до того момента, пока двигатель не перейдет в двигательный режим, а далее в точку работы 3 кривая Б. Данное торможение возможно, когда скорость вращения ротора асинхронного двигателя больше чем синхронная скорость. Частным примером такой работы мы рассмотрели в предыдущей статье про торможение противовключением, в которой рассказывалось как производят спуск груза в грузоподъемных механизмах с отдачей энергии в сеть.
Звезда-двойная звезда
Рисунок 3 – Схема переключения звезда-двойная звезда
Рисунок 4 – Механическая характеристика при переключение со звезды на двойную звезду
А — звезда; Б — двойная звезда.
На рисунке выше видно, что критическим момент остается прежним, а синхронная скорость уменьшается вдвое.
Говоря про мощность, то при переключении на двойную звезду, она возрастает вдвое. При переключении обмоток, работая в точке 1 кривая А, перейдем в точку 2 кривая Б, и с точки 2 в точку 3, так же как и в предыдущем случае будет осуществляться рекуперативное торможение.
Добавить комментарий
h4e.ru
Параметры электродвигателя : тип соединения обмоток
Это очень важный параметр трехфазного электродвигателя. Все шесть выводов начал и концов обмоток выведены в барно двигателя. Подключить их можно либо в звезду, либо в треугольник.
Рядом с символами «треугольник/звезда»
на табличке указывается номинальное напряжение
– «220/380 В»
. Это означает, что при включении в сеть трехфазного тока напряжением 380 В обмотки двигателя нужно соединить в звезду. Ошибка в соединении приведет к выходу электродвигателя из строя.
Номинальный ток также указывается через дробь. В описанном случае необходимо значение, указанное в знаменателе.