Что такое асинхронный двигатель?
Прежде чем переходить к модели, алгоритмам и системам управления электроприводом, нужно точно знать, что он собой представляет. Это позволяет выявить в его цепи такие моменты, которые можно будет использовать для организации плавного изменения ключевых характеристик (частота/скорость вращения, напряжение). Соответственно, можно определить параметры контроллера, разработать технологические карты для его размещения в шкафу и обслуживания.
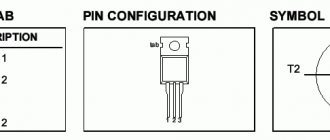
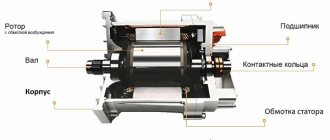
Работа любого асинхронного двигателя базируется на возбуждении на контактных обмотках магнитного поля при подаче электричества от шкафа управления. Оно возникает на статоре – неподвижной части двигателя, которая состоит из кольцевого сердечника (магнитопровода), собранного из отдельных металлических пластин. Каждая из них имеет концентрические пазы на внутренней стороне кольца, которые при совмещении образуют продольные пазы. Они служат для намотки проволоки, составляющей основу статорной обмотки.
Также асинхронный двигатель имеет подвижную часть – ротор, совмещенный с приводным валом. Он также имеет пластинчатый сердечник с пазами, но уже на внешней стороне. Вместо проволоки используются медные прутки, которые по краям замыкаются пластинами (такой вариант двигателя называется с короткозамкнутым ротором).
За счет того, что частоты вращения магнитных полей статора и ротора отличаются, в обмотках последнего за счет индукции наводится электрический ток. Он, в свою очередь, побуждает электромагнитную силу, приводящую ротор в движение (вращение). Разница частот обычно называется скольжением. Его величина составляет порядка 2…10%.
Управление векторным асинхронным двигателем, применение и способы
Для понимания что такое «векторное» управление — реакция ворочающего устройства с так величаемым «пространственным» вектором, что вертится с частотой сферы двигателя. И чтобы лучше понимать все его функции желательно пересмотреть статью и найти нужную информацию.
Асинхронный движок — двигатель переменчивого течения, где энергетика в намотках статора творят вертящееся поле магнитов. Такое поле индуктирует потоки в намотке ротора, воздействует на работающие токи, притягивая в работу ротор.
Впрочем, дабы в работающем роторе, ворочающееся магнитная сфера статора, индуктировала токи, ротор в аппаратном кружении принужден чуть-чуть опаздывать от кружений статора. Следовательно, в несинхронном моторе быстрота циркуляции ротора постоянно примерно такая как в стремительности верчения магнитного поля (что обусловливается импульсами неустойчивого тока, из-за чего и питается движок). Когда отход ротора от движущегося магнитного поля статора будет больше (скатывание) следовательно создастся сильная нагрузка на моторчик.
Недостаток синхронности промеж кручением ротора и магнитов в статоре нормальная черта для нестабильного моторчика, от чего и походит его название. Ворочающееся магниты в статоре образовывается с использованием обвивок, питаемых потоками, сомкнутыми по фазе.
Естественно ради данной миссии приспосабливается 3х фазный неустойчивый ток. Существует вдобавок одно фазные асинхронные моторчики, в каких прогресс фаз посреди токов в обвивках формируется подключением всевозможных жвавых противодействий в обмотке. Осуществить качественную настройку угловой стремительности вращения ротора, и еще вращающего фактора на валу нынешних бесщёточным моторов, употребляют или векторное, или скалярное регулирование электронным приводом.
Векторное управление-способ управления бесщеточными моторами неустойчивого тока, какой разрешает самостоятельно и в принципе безынерционной координировать быстроту верчения и момент на валу электродвигателя.
Ключевая мысль векториального движения охватывается в том, дабы проверять не лишь величину и импульс усилия питания, но также и фазу. Иными словами испытывается значение и угол пластического вектора.
Превосходства векторного управления:
- высочайшая достоверность регулирования быстроты;
- гладкий момент начала движения и плавное обращение мотора во всем спектре частот;
- скорая подавленность на замене нагрузки: при изменении перегрузки абсолютно не случается изменения скорости;
- усиленный спектр управления и пунктуальность регулирования;
- снижаются утечки на нагревании и намагничивание, увеличивается КПД электродвигателя.
К минусам векториального управления можно отнести:
- потребность настраивать параметры электродвигателя;
- огромные качания стремительности при долговременной нагрузке;
- высокая вычислительная сложность.
Пользуются такими методами регулировки асинхронным двигателем: ·
- реостатный — модифицирование трансляции верчения асинхронного мотора с фазным ротором способом замены противодействия реостата в цепях ротора, также вдобавок это делает отправной момент больше и увеличивает решающее скольжение; ·
- частотный — переворот импульсов циркуляции асинхронного мотора путем смены проводимость потока в питающем напряжении, из-за чего это способствует модифицированию повторяемости верчении поля статора. Используется введение мотора сквозь проводимый реформатор;
- переподключение обвивок с помощью схемы «звезда» на «треугольник» в течении запуска двигателя, что создает уменьшение отправных токов в обмотках в три раза, но также оно содействует уменьшению момента; ·
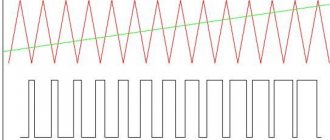
- пульсирующей подачей — усилие питания специфического варианта (например, пилообразного); · установление вспомогательной ЭДС гармонично либо противоположно направлено с частотой скольжения во вторичную цепь; ·
- изменением количества полюсов, ежели подобное перекидывание предвидено разумно (только на короткозамкнутых роторах);
- замена амплитуды снабжающего напряжения, если модифицируется исключительно амплитуда (или воздействующее значение) закручивающегося потока. Дальше вектора напряжений управления и возбуждения остаются перпендикулярны (автотрансформаторный пуск); ·
- фазисное руководство свойственно тем, что переворот импульсы верчения ротора создается способом изменения продвижения фаз между векторами усилий возбужденности и управления. ·
- амплитудно-фазовый прием охватывает два описанных способа; ·
- вложение в аппарат питания статора реакторов; ·
- индуктивное противодействие на моторе с фазным ротором.
Схема электрическая
Фундаментом схемы представляются очертания контроля магнитного потокового сцепления и обстоятельства совместно с блоком оценки, что возможно будет задействован многообразными способами. Это значит, что наружный контур руководства быстротой в значительном уровня унифицирован и генерирует заворачивающие сигналы для настраивания фактора М* и магнитного потокосцепления * (через источник управления потоком). Быстрота мотора имеет возможность измерения с помощью измерителя (скорости / положения) либо свойственно делать через оценку, позволяющего создавать бездатчиковое управление.
Классифицирование технологий векториального управления
Здесь рассматриваются исключительно самые знаменитые технологии управления. Обговариваемые способы контроля фактора презентованы для систем управления асинхронными движками и синхронными моторами с долговременными магнитами с синусоидальной возвратной ЭДС.
Чаще всего способы регулировки моментом распределяют на такие виды:
- Линейные (ПИ, ПИД) регуляторы;
- Нелинейные (гистерезисные) регуляторы.
- Без возвратной связи.
- Имеется обратная связь.
- В установившемся строю.
Векторное регулирование подробности
Чтобы избавится от минусов, в дальнем 1971 г. инженеры фирмы Simens рекомендовали пользоваться векторным руководством в инструменте, в ходе чего управление исполняется с возвратной связью значений в потоке. Первоначальные налаженности векториального направления держали в себе детекторы в инструментах. Сейчас подход к такому способу изрядно другой:
- точный образец мотора разрешает разбирать быстроту циркуляции ротора и валовый момент из исходной стадии существующих токов фаз (с повторяемости и количества токов в намотках статора).
Такой больше сознательный подход помогает сотворить безотносительно и практически безинерционно координировать и валовый момент, вдобавок и быстроту циркуляции вала на силу напора, так как в течении управления предусматриваются фазы потоков. Кой-что побольше исполнительные налаженности векторного распоряжения обустроены принципиальными методами возвратной связи на силу движения, также системы руководства без измерителей стремительности называются без датчиковыми.
В связи с участками употребления любого из электроприводов, их методика векторного управления должно быть будет обладать своими особенностями, также какую-то нужную ступень точности для управления. Ежели условия к действительности регулировки стремительности дозволяют уклон к 1,5%, а масштаб регуляции — не выше 1 к 100, тогда бездатчиковая конструкция абсолютно будет преклонной. Когда же необходима верность регулировки быстроты со сдвигом не выше 0,2%, а спектр объединяется до 1 к 10000, то важно существование возвратной связи по измерителю быстроты на валу.
Присутствие коннектора стремительности в примерах векторного управления разрешает идеально координировать начало и при малых проводимостях до 1 Гц. Что ж, векториальное регулирование доставляет надлежащие преимущества. Высочайшую точность регулирования стремительностью верчения ротора (и без измерителя быстроты на аппарате) в условиях подвижно сменный перегрузки на валу, поэтому рывков не ожидается. Легкое и прямое обращение вала на незначительных оборотах.
Большой КПД в для невысоких утрат в нормальной среде этих усилия питания. На векторное регулирование приходятся и минусы. Запутанность вычислительных действий. Потребность создать исходные параметры (к примеру контролируемого привода).
Для количественного электронного привода векториальное регулирование не подойдет, тут предпочтительно будет использоваться скалярное.
Результат случается из-за явления в цилиндре токи циркуляции. Так как кажется в законе электромагнитной индукции, обнаруженного Фарадеем, чтобы заменить поток магнитов изолированного силуэта в середине является ЭДС или напряжение. Это значение, употребительно к медному цилиндру, мгновенно активизирует происхождение в цилиндре тока.
Также данное течение тоже организовывает свое, встречный электромагнитный поток, сосредоточенный прямо в иной край от замены потока магнита:
- Высокочастотный ток, появляющийся в изолированном коротающем контуре, обладает подобной стороной движения, что и созданное им поле магнитов действует сопротивление этой смене магнитного потока, что был активизирован с помощью данного тока.
- Закрытый очерк противится перемене магнитного течения в инструменте.
- Ежели быстро поставить магнит к медному цилиндру, тогда осуществляется дерзкое модифицирование магнитного течения, так в цилиндре протекут подобные встречные стремления, тогда магнитная сфера в нем при начале движения будет одинаково нулю: магнитное поле приближенного магнита будет абсолютно возмещено магнитными токами цилиндра.
Когда магнит преподнести и держать, то энергетика в цилиндре благодаря присутствию функционального противодействия меди потихоньку снизиться, а поле цилиндра, организовывают с потоками, исчезнет: магнитное течение долговременного магнита «вырвется» вовнутрь цилиндра, словно вообще цилиндра не существует. Нужно лишь попробовать спрятать магнит, тогда цилиндр отзовется опять – только сейчас он возможно сможет самостоятельно «воссоздать» в середине корпуса исчезающий электромагнитный поток, тогда будет сначала противится замене магнитного потока, в такой ситуации и его пропаже.
Как числит «воссоздать электромагнитное движение»?
Поэтому известно, что некоторый промежуток времени, духовой цилиндр позволено находить символическим «беспрерывным магнитом» – в агрегате движется турбулентный ток, вызывающий магнитное поле (при данном же типе «свисают» сверхпроводники в магнитном поле). Ротор асинхронного мотора, за видом «беличья клетка», с током какой-то из «рамок» беличьей клетки отзывает на возрастание наружного магнитного поля.
Векториальная датчиковая конструкция руководства прерывным движком
В смотрителе водятся свидетельства с датчика расположения ротора, и протекающие флюиды статора в осях, . В конце созерцателя – расположение «магнита» ротора, собственно угол созерцающего потокового сцепления ротора. В оставшихся конструкция абсолютно подобна подобной схеме назначены непрерывном инструменте, исключительно оси d,q переписаны на x,y, а на ось x задано поручение потока, что ему может помогать «магнит» в роторе. Вдобавок для многих значений добавлен показатель “s”, чтобы было понятно, лишь предоставленное значение располагает позицию к статору, вместо ротора.
Что же выходит? Магнит ротора всегда скользит из-за расположения на роторе на край оси y. Чем сильнее данный ток, тем более мощное скольжение. Зритель в настоящем периоде исчисляет расположение данного магнита и «подстраивает» оси x,y все время наперед по касательству к осям d,q (расположению ротора). Ось x постоянно подходит по нынешнему расположению потокового сцепления в роторе – расположению «магнита». Оси x,y мчатся всегда (в моторном усилие) чуть-чуть скорее верчения ротора, убирая сползание.
Энергетика в роторе, ежели ее замерить либо промоделировать, выходят синусоидальными. Исключительно модифицируются данные приборы без проводимости статорных потоков, а с присутствием импульсных скольжений, то есть бесконечно медленно. Когда в статоре индустриального прерывного 50Гц, тогда когда осуществится включение режиме с нагрузкой гармоника в роторе – малые значения герц.
Почему векторное регулирование асинхронным движком круче, нежели скалярное?
Скалярное руководство это если к двухскоростным движкам приспосабливается усилие установленной проводимости и амплитуды – например, 380В 50Гц. И от перегрузки для роторов это никак не влияет на работу – без регуляторов токов и прочее… Элементарно устанавливается радиочастота усилия и данная амплитуда — скалярные значения, а энергетика и потоки в движке самостоятельно устанавливаются, так как им нужно.
В созданном строю произведения мотора векториальное регулирование неразличимо от скалярного – векторное несомненно тоже будет представляться даже в нормальной нагрузке такие же 380В, 50Гц. Однако переходные виды исключены… ежели необходимо живо включить электродвигатель с данным моментом, ежели необходимо разрабатывать диаграмму, когда имеется пульсирующая нагрузка, когда надо выработать тепло электрогенераторный устав с нужной степенью силы – такие данные скалярное регулирование либо не может совершить, либо осуществляет такое с очень плохим, медлительными переходными действиями, что могут к также «выбить защиту» перенастройки импульсов по превышению тока либо усилия звена долговременного тока (двигатель раскачивается и может вскакивать в электрогенераторный стан, к чему устройство частоты может быть не подготовлен).
В векторной структуре «контролирование». Начало движения задается самому, течение также. Дозволено сузить его на нужном этапе, дабы не превзойти законы защиты. Позволено корректировать и форсировать токи, ежели мгновенно необходимо выработать в разы мощнейший момент. Дозволено координировать не лишь начало двигателя, также и течение (ток оси x): когда перегрузка на двигателе не велика, тогда нет никакого резона поддерживать исполненный ток в роторе (создавать магнит «оптимального режима») – возможно расслабить его, сделать меньше потери.
Надо регулировать поспешность регулятором быстроты с рослой пунктуальностью и быстротой. Важно брать в действие неодновременный привод как использование тягового, придавая ему нужный момент тяги. Короче говоря, для тяжелых усилий с активным произведением мотора векториальное регулирование асинхронным движком незаменимо.
Вдобавок есть характерные необыкновенности векторного руководства асинхронного движителя от синхронного.
Первое это прибор измерений значения. Когда, чтобы осуществить одновременный привод важно понимать безусловное расположение ротора, дабы знать положение магнита, то в асинхронном приводе такая информация не нужна. Ротор не обладает некоторый сформулированной полюсной системой, «магнит» там безостановочно скользит, но можно взглянуть в схемы контроля потокового сцепления ротора, и там также не надобно сведения положения: в способы включения вмещается лишь гармоника циркуляции ротора. Следовательно на измерителе возможно сэкономить: полно хватить обыкновенного инкрементального энкодера для наблюдения ионизации верчения (возможно тахогенератора), совершенные измерители расположения не важны.
Следующий край– регулирование движением в асинхронном моторном аппарате. В непрерывном автомате с долговременными магнитами течение не настраивается, который исключает наибольшую частоту кручения мотора: не будет брать усилие с инвертора. В разновременном двигателе, иногда такое происходит… элементарно нужно убавить поручение по оси x и двигается дальше! Наибольшее колебание не ограничено. Неукоснительно таким же способом имеются бездатчиковые методы векторного распоряжения асинхронным двигателем, что расценивают угол потокового сцепления ротора не работающее предупреждение измерителя положения (или быстроты) вала ротора.
Буквально так само, как и в непрерывных инструментах, в системе работоспособности подобных методов имеется трудности на невысокой колебаний верчения ротора, в котором ЭДС мотора маленькое. Ежели при индустриальных асинхронных движков работу делают дешевле, устанавливая дюралевую клетку, тогда в тяге, в которой массово габаритные значения более нужны, будет обратное, может утилизировать медный цилиндр.
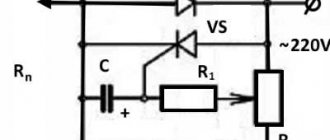
Тиристорное управление
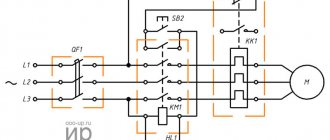
Чтобы руководить асинхронным мотором важно в употребление должно входить тиристоры, в составлении с релейно-контакторными агрегатами. Они приспосабливаются в свойстве мощных ингредиентов и входят в состав статорной цепи, релейно-контакторные автоматы подсоединяются в цепь руководства. Используются тиристоры как силовые соединители, позволено на статор при запуске предлагать усилие к нулю по нарицательное наречие, уменьшать энергетику и моменты ящика, реализовывать действенное затормаживание или шаговый распорядок функционирования.
Для пуска мотора подсоединяется взаимодействующим коммутатором QF, жмется на клавишу SB1 «Пуск», в следствии и подключаются контакторы КМ1 и КМ2. На движущейся катоды тиристоров даются толчки, сомкнутые на 60 сравнительно силы. К статору мотора ставится низкую силу, что делает отправной ток ниже и пусковой момент также.
Как можно управлять скоростью вращения двигателя?
Очевидно, что двигатель в обычном режиме работы от сети (электрического шкафа) имеет стандартную скорость/частоту вращения. Это ограничивает прямое его использование, вынуждая применять различные редукторные механизмы для понижения частоты до требуемой. Но даже тогда нет возможности динамично менять обороты, а вместе с ними, мощность, подачу, поскольку все равно остаются фиксированными частоты на выходе из двигателя и редуктора. Для расширения существующих рамок используют разные способы управления (частотные, импульсные, фазные и т. д), которые можно разделить на две большие группы:
- Скалярное. Как правило, используется на приводных двигателях компрессорных, вентиляторных, насосных и прочих механизмов, где требуется контроль скорости вращения или любого другого параметра, связанного с датчиками,
- Векторное. Это усовершенствованная концепция, которая предполагает раздельный, независимый контроль, изменение момента и магнитного потока. Токосцепление ротора поддерживается на постоянном уровне, что позволяет сохранить максимальный показатель момента.
Управление асинхронным двигателем
Отличие скалярного от векторного управления как раз заключается в возможности осуществления контроля возбуждения (потока). Фактически, он представляется как двигатель постоянного тока, имеющий независимые друг от друга обмотки. Такой подход позволяет создать подобную математическую модель системы работы контроллера.
Принципиальная схема
Схема, показанная на рис.2, состоит из: управляющего устройства D2 (применен микроконтроллер PIC16F628-20/P, работающий на частоте 20 МГц), кнопок управления «Пуск» (SA1), «Стоп» (SA2), кнопок увеличения и уменьшения частоты SA3 и SA4 соответственно, двоично-семисегментного дешифратора D1, светодиодных матриц HG1 и HG2, узла торможения VT9, VT10, K1.
В силовой цепи используется трехфазный мостовой драйвер D4 IR2130 фирмы International Rectifier, имеющий три выхода для управления нижними ключами моста и три выхода для ключей с плавающим потенциалом управления.
Рис. 2. Принципиальная схема микроконтроллерного управления асинхронным трехфазным двигателем.
Рис. 2. Принципиальная схема микроконтроллерного управления асинхронным трехфазным двигателем (продолжение).
Данная микросхема имеет систему защиты по току, которая в случае перегрузки выключает все ключи, а также предотвращает одновременное открывание верхних и нижних транзисторов, тем самым предотвращает протекание сквозных токов. Для сброса защиты необходимо установить все единицы на входах HNx, LNx. В качестве силовых ключей применены МОП-транзисторы IRF740.
Цепь перегрузки состоит из датчика тока R10, делителя напряжения R7R9, позволяющего точно установить ток срабатывания защиты, и интегрирующей цепочки R6C3, которая предотвращает ложное срабатывание токовой защиты в моменты коммутаций. Напряжение срабатывания защиты составляет 0,5 В по входу ITRP (D4).
После срабатывания защиты на выходе FAULT (открытый коллектор) появляется лог.»0″, зажигается светодиод HL1 и закрываются все силовые ключи.
Для более быстрой разрядки емкостей затворов силовых транзисторов можно установить параллельно резисторам, включенным в цепь затвора, диоды в обратном направлении. Двигатель необходимо включить по схеме звезды.
Источник питания состоит из мощных диодов VD11-VD14, токоограничительного резистора R20, фильтрующей емкости C10, емкости C11, предотвращающей всплески, которые возникают при коммутациях на паразитных индуктивностях схемы, а также маломощного трансформатора T1, стабилизатора напряжения 15 В D5 для питания схемы драйвера, стабилизатора напряжения 5 В D3 для питания микроконтроллера и схемы индикации.
При использовании более мощного двигателя вместо транзисторов IRF740 можно использовать IGBT-транзисторы типов IRGBC20KD2-S, IRGBC30KD2-S, при этом диоды VD7-VD10, VD15, VD16 следует выпаять. Конденсатор C11 типа К78-2 на напряжение 600…1000 В. Вместо VD1-VD6 желательно применить сверхбыстрые диоды типа 10DF6, а емкости С15-С17 уменьшить до 2,2…4,7 мкФ, которые должны быть рассчитаны на напряжение 50 В. Трансформатор T1 мощностью 0,5.2 Вт от калькулятора с перемотанной вторичной обмоткой. Обмотка намотана проводом 00,2 и должна выдавать 19.20 В.
Формы и схема векторного управления
Все существующие на сегодня системы векторного управления работой двигателей можно разделить на две группы:
- Датчиковые. Блок управления работой двигателя имеет с ним обратную связь по скорости, с помощью расположения на валу соответствующих датчиков,
- Бездатчиковые. Это системы, которые работают без датчиков скорости на основном валу.
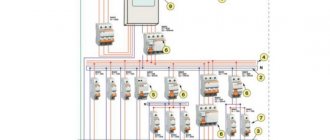
Датчиковые системы являются более сложными, так как точность контроля составляет 1:10000. Бездатчиковые системы работают на уровне не более 1:100. Все частотники с учетом уровня создаваемых помех устанавливаются в центральных или отдельных шкафах.
Если представить все выше сказанное как наглядную схему, то получится нечто следующее:
Здесь можно видеть такие ключевые компоненты системы управления, как:
- АД – собственно, асинхронный двигатель (объект контроля),
- БРП – логический блок регуляторов для переменных уравнения,
- БВП – логический блок, отвечающий за вычисления по переменным,
- БЗП – блок, задающий значения переменных,
- ДС – датчик скорости на валу двигателя,
- АИН ШИМ – блок амплитудно-импульсной/широтно-импульсной модуляции.
То, что на схеме отображено в виде блоков, на практике является всего лишь параметрическими элементами цепи управления, которая реализуется на микроконтроллере. Соответственно, сам контроллер и сопутствующие исполнительные механизмы монтируются в электрический шкаф. Для правильного монтажа разрабатывается технологическая карта.
Обзор вариантов прямого управления моментом асинхронных электродвигателей — часть 1
В отличие от метода управления FOC, который содержит блок широтноимпульсной модуляции и контур тока, DTC и DSC содержат релейные регуляторы, которые работают непосредственно с потоком статора и моментом без использования внутренних контуров тока.
После появления этих двух работ исследователи в области электропривода обратили свое внимание на улучшение новых методов управления и разработку усовершенствованных методов, основанных на том же принципе [4-8].
Большинство работ было направлено на преодоление основных недостатков DTC и DSC:
- Большой размах колебаний значений электромагнитного момента и амплитуды вектора потока статора («рябь» или в иностранной литературе «ripple»).
- Непостоянство частоты коммутации ключей инвертора, негативно сказывающееся на тепловом состоянии ключей.
- Большое значение амплитуды тока статора при изменении амплитуды вектора потока статора, в частности, при пуске.
Если третий недостаток можно устранить введением обратной связи по амплитуде тока статора или ограничением скорости нарастания амплитуды вектора потока статора, то первый и второй недостатки преодолеть сложно.
В зарубежной литературе предложено множество методов прямого управления моментом и потоком асинхронных электродвигателей, которые целесообразно разбить на группы:
- Замкнутые методы управления, основанные на комплексном представлении модели электродвигателя (ISC) [8, 9].
- Разомкнутые методы, основанные на вычислении оптимальной длительности импульса вектора напряжения на основе линеаризованной модели двигателя [10, 11].
- Разомкнутые методы, основанные на вычислении заданных значений, составляющих вектора напряжения статора, способствующих достижению амплитудой потока статора и электромагнитным моментом заданных значений после одного периода дискретизации (Deadbeat DTC) [12, 13].
- Замкнутые методы управления электромагнитным моментом и амплитудой вектора потока статора, основанные на модели электродвигателя в координатной системе, связанной с вектором потока статора (DTC-SVM) [14-16].
- Методы увеличения частоты коммутации ключей инвертора путем введения сигнала высокочастотной помехи в сигналы ошибок регулирования момента н амплитуды вектора потока статора (Dithering DTC) [17, 18].
- Методы, основанные на DTC и нечеткой логике, используемой для управления шириной импульсов напряжения (Fuzzy based DTC) [19].
- Методы, основанные на нечеткой логике, полностью заменяющие исходную систему DTC (Fuzzy DTC) [20-22].
- Методы управления электромагнитным моментом н амплитудой вектора потока статора, основанные на искусственных нейронных сетях (ANNDTC) [21, 22].
Управление частотными контроллерами
Современные преобразователи частоты тока/напряжения работают и по скалярному, и по векторному варианту, используя параметрические математические модели, реализованные в программном коде встроенного микроконтроллера. Частотники электронного типа работают на тиристорных мостовых схемах и включают следующие основные компоненты:
- Выпрямитель – тиристорный или транзисторный мост, преобразующий переменный ток в постоянный,
- Инвертор – блок АИМ/ШИМ, работающий по обратному принципу, то есть преобразующий постоянный ток в переменный.
Поскольку такой переход так или иначе влияет на форму графика выходного напряжения, то блочный контроллер/частотник может использовать в схеме дросселя и специальные ЕМС фильтры. Последние применяют для снижения интенсивности электромагнитных помех.
Управление частотными контроллерами
Центральный контроллер обеспечивает параметрическое управление схемой, а также вспомогательными задачами, например, диагностикой состояния, защитой от перегрузок и т. п. Сам частотник обычно монтируется в отдельный шкаф, чтобы уменьшить электромагнитные помехи на оборудование.
В целом, векторное управление, организованное на современном контроллере и преобразователе частоты, позволяет добиться плавного регулирования ключевых величин, а также побочных параметров работы оборудования. Ввиду наличия электромагнитных помех при работе, частотники обычно размещают отдельно от основного электрического шкафа.