Рассмотрим 5 популярных способа как вычислить мощность двигателя автомобиля используя такие данные как:
- обороты двигателя,
- объем мотора,
- крутящий момент,
- эффективное давление в камере сгорания,
- расход топлива,
- производительность форсунок,
- вес машины
- время разгона до 100 км.
Каждая из формул, по которой будет производиться расчет мощности двигателя автомобиля довольно относительная и не может со 100% точностью определить реальную лошадиную силу движущую машину. Но произведя подсчеты каждым из приведенных гаражных вариантов, опираясь на те или иные показатели, можно рассчитать, по крайней мене, среднее значение будь-то стоковый или тюнингованный движок, буквально с 10-ти процентной погрешностью.
Мощность — энергия, вырабатываемая двигателем, она преобразуется в крутящий момент на выходном валу ДВС. Это не постоянная величина. Рядом со значениями максимальной мощности всегда указываются обороты, при которых можно её достигнуть. Точкой максимума достигается при наибольшем среднее эффективном давлении в цилиндре (зависит от качества наполнения свежей топливной смесью, полноты сгорания и тепловых потерь). Наибольшую мощность современные моторы выдают в среднем при 5500–6500 об/мин. В автомобильной сфере измерять мощность двигателя принято в лошадиных силах. Поэтому поскольку большинство результатов выводятся в киловаттах вам понадобится калькулятор перевода кВт в л.с.
Как рассчитать мощность через крутящий момент
Самый простой расчет мощности двигателя авто можно определить по зависимости крутящего момента и оборотов.
Крутящий момент
Сила, умноженная на плечо ее приложения, которую может выдать двигатель для преодоления тех или иных сопротивлений движению. Определяет быстроту достижения мотором максимальной мощности. Расчетная формула крутящего момента от объема двигателя:
Мкр = VHхPE/0,12566
, где
- VH – рабочий объем двигателя (л),
- PE – среднее эффективное давление в камере сгорания (бар).
Обороты двигателя
Скорость вращения коленчатого вала.
Формула для расчета мощности двигателя внутреннего сгорания автомобиля имеет следующий вид:
P = Mкр * n/9549 [кВт]
, где:
- Mкр – крутящий момент двигателя (Нм),
- n – обороты коленчатого вала (об./мин.),
- 9549 – коэффициент, дабы обороты подставлять именно в об/мин, а не косинусами альфа.
Поскольку по формуле, результат получим у кВт, то при надобности также можно конвертировать в лошадиные силы или попросту умножать на коэффициент 1,36.
Использование данных формул — это самый простой способ перевести крутящий момент в мощность.
А дабы не вдаваться во все эти подробности быстрый расчет мощности ДВС онлайн, можно произвести, используя наш калькулятор.
Но, к сожалению, данная формула отражает лишь эффективную мощность мотора которая не вся доходит именно до колес автомобиля. Ведь идут потери в трансмиссии, раздаточной коробке, на паразитные потребители (кондиционер, генератор, ГУР и т.п.) и это без учета таких сил как сопротивление качению, сопротивление подъему, аэродинамическое сопротивление.
Электрическая константа времени
Представляет собой время, необходимое для достижения уровня тока до 63 % после подачи напряжения на обмотки привода. Параметр обусловлен переходными процессами электромеханических характеристик, так как они быстротечны ввиду большого активного сопротивления. Общая формула расчета постоянной времени:
te = L ÷ R.
Однако электромеханическая константа времени tm всегда больше электромагнитной te. Первый параметр получается из уравнения динамических характеристики двигателя при сохранении условии, когда ротор разгоняется с нулевой скоростью до максимальных оборотов холостого хода. В этом случае уравнение принимает вид
M = Mст + J × (d(omega) ÷ dt), где
Mст = 0.
Отсюда получаем формулу:
M = J × (d(omega) ÷ dt).
По факту электромеханическую константу времени рассчитывают по пусковому момент — Mп. Механизм, работающий в идеальных условиях, с прямолинейными характеристиками будем иметь формулу:
M = Mп × (1 — omega ÷ omega0), где
omega0 — скорость на холостом ходу.
Такие расчеты используют в формуле мощности электродвигателя насоса, когда ход поршня напрямую зависит от оборотистости вала.
Как рассчитать мощность по объему двигателя
Если же вы не знаете крутящий момент двигателя своего автомобиля, то для определения его мощности в киловаттах также можно воспользоваться формулой такого вида:
Ne = Vh * pe * n/120
(кВт), где:
- Vh — объём двигателя, см³
- n — частота вращения, об/мин
- pe — среднее эффективное давление, МПа (на обычных бензиновых моторах составляет порядка 0,82 — 0,85 МПа, форсированных — 0,9 МПа, а для дизеля от 0,9 и до 2,5 МПа соответственно).
Для получения мощности движка в «лошадках», а не киловаттах, результат следует разделить на 0,735.
Другие типы двигателей
Не секрет, что двигатели применяются не только в автомобилях, но и в промышленности и даже в быту. Двигатели разных размеров можно найти на заводах – приводят в движение валы – а также в бытовой технике вроде автоматической мясорубки.
Иногда требуется вычислить реальную мощность и таких двигателей. Как это сделать, описано далее.
Стоит сразу заметить, что расчет мощности 3-фазного двигателя можно произвести следующим образом:
- P = Mкрутящий * n, где Mкрутящий – крутящий момент, а n – скорость вращения вала.
Расчет мощности двигателя по расходу воздуха
Такой же приблизительный расчет мощности двигателя можно определять и по расходу воздуха. Функция такого расчета доступна тем, у кого установлен бортовой компьютер, поскольку нужно зафиксировать значение расхода, когда двигатель автомобиля, на третьей передаче, раскручен до 5,5 тыс. оборотов. Полученное значение с ДМРВ делим на 3 и получаем результат.
Формула как рассчитать мощность ДВС по расходу воздуха в итоге выглядит так:
Gв [кг]/3=P[л.с.]
Такой расчет, как и предыдущий, показывает мощность брутто (стендовое испытание двигателя без учета потерь), которая выше на 10—20% от фактической. А еще стоит учесть, что показания датчика ДМРВ сильно зависят от его загрязненности и калибровок.
Виды электродвигателей
По источнику питания приводы разделяют на работающие от:
- Постоянного тока.
- Переменного тока.
По принципу работы их, в свою очередь, делят на:
- Коллекторные.
- Вентильные.
- Асинхронные.
- Синхронные.
Вентильные двигатели не относят к отдельному классу, так как их устройство является вариацией коллекторного привода. В их конструкцию входит электронный преобразователь и датчик положения ротора. Обычно их интегрируют вместе с платой управления. За их счет происходит согласованная коммутация якоря.
Синхронные и асинхронные двигатели работают исключительно от переменного тока. Управление оборотами происходит с помощью сложной электроники. Асинхронные делятся на:
- Трехфазные.
- Двухфазные.
- Однофазные.
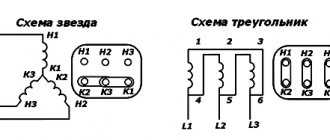
Теоретическая формула мощности трехфазного электродвигателя при соединении в звезду или треугольником
P = 3 * Uф * Iф * cos(alpha).
Однако для линейных значений напряжения и тока она выглядит как
P = 1,73 × Uф × Iф × cos(alpha).
Это будет реальный показатель, сколько мощности двигатель забирает из сети.
Синхронные подразделяются на:
- Шаговые.
- Гибридные.
- Индукторные.
- Гистерезисные.
- Реактивные.
В своей конструкции шаговые двигатели имеют постоянные магниты, поэтому их не относят к отдельной категории. Управление работой механизмов производится с помощью частотных преобразователей. Существуют также универсальные двигатели, которые функционируют от постоянного и переменного тока.
Расчет мощности по массе и времени разгона до сотни
Еще один интересный способ как рассчитать мощность двигателя на любом виде топлива, будь-то бензин, дизель или газ – по динамике разгона. Для этого используя вес автомобиля (включая пилота) и время разгона до 100 км. А чтобы Формула подсчета мощности была максимально приближена к истине нужно учесть также потери на пробуксовку в зависимости от типа привода и быстроту реакции разных коробок передач. Приблизительные потери при старте для переднеприводных составит 0,5 сек. и 0,3-0,4 у заднеприводных авто.
Используя этот калькулятор мощности ДВС, который поможет определить мощность двигателя исходя из динамики разгона и массы, вы сможете быстро и достаточно точно узнать мощь своего железного коня не вникая в технические характеристики.
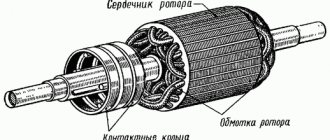
Краткие теоретические сведения. Трехфазный асинхронный двигатель
Трехфазный асинхронный двигатель
Целью работы
является изучение работы асинхронного двигателя с короткозамкнутым ротором и снятие его механической и рабочей характеристик.
Краткие теоретические сведения
Простота конструкции, надежность в работе, экономичность и невысокая стоимость являются основными причинами широкого использования асинхронных двигателей в промышленности.
Частота вращения магнитного поля статора n
1 определяется по формуле
n
1 = , об/мин (1)
где f
1 — частота сети, Гц;
р
— число пар полюсов.
Разность в частотах вращения ротора n
2 и поля статора
n
1 выражают скольжением
s
= (2)
Скольжение возрастает с увеличением нагрузки на валу двигателя. У современных двигателей в зависимости от серии и назначения скольжение при номинальной нагрузке составляет 2…8%. При холостом ходе скольжение составляет всего 0,1…0,3%.
Если считать скольжение при номинальной нагрузке s
н равным 5%, то можно указать частоты вращения ротора асинхронных двигателей при питании от сети с
f
= 50 Гц.
Таблица 1.
| Частота вращения при s н = 5% | Число пар полюсов на статоре |
| Поля статора n 1, об\мин | |
| Ротора n 2, об\мин |
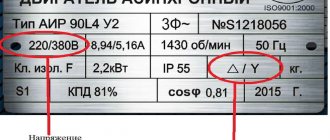
Асинхронные двигатели малой и средней мощности, благодаря возможности соединения обмоток статора по схеме Y/Δ или Δ/ Y, могут работать при питании от двух соответствующих напряжений 380/220 В.
На заводском щитке двигателя это обозначается как
Y/Δ, 380/220 В.
Простейшим способом пуска в ход двигателя с короткозамкнутым ротором и номинальной мощностью до 100 кВт является непосредственное включение обмотки статора в трехфазную цепь.
Частота вращения ротора двигателя может быть выражена формулой
n
1 = (1–
s
1), об/мин. (3)
Электрическая мощность Р
1, потребляемая асинхронным двигателем от сети, расходуется на полезную мощность
Р
2 на валу и потери мощности на нагрев обмоток статора и ротора Δ
Р
э1 и Δ
Р
э2, потери в магнитопроводе статора и в стали ротора от вихревых токов и на гистерезис Δ
Р
ст и на потери от трения в подшипниках Δ
Р
тр.
Таким образом,баланс мощности в двигателе выразится так
Р
1 =
Р
2 + Δ
Р
тр + Δ
Р
э + Δ
Р
ст, Вт. (4)
Активная мощность двигателя, потребляемая из сети, вычисляется по формуле
Р
1 = 3
Р
1ф, Вт, (5)
где Р
1ф =
U
1ф ∙
I
1 – мощность одной фазы, измеренная ваттметром, Вт.
Механическая мощность, развиваемая на валу двигателя, Р
мех складывается из полезной мощности на валу
Р
2 и потерь на трение
Р
тр
Р
мех =
Р
2 +
Р
тр, Вт. (6)
Механическая мощность может быть определена по формуле
Р
мех = 0,105
М
∙
n
2, Вт, (7)
где М
– вращающий момент, Нм;
n
2 – частота вращения ротора, об\мин.
Магнитные потери в магнитопроводе статора, т.е. потери в стали ΔР
ст, практически не изменяются при увеличении нагрузки на валу
Р
2 и называются постоянными.
С другой стороны, потери на нагрев обмоток статора и ротора, т.е. потери в меди ΔР
э зависят от нагрузки и называются переменными.
Коэффициент полезного действия асинхронного двигателя η
определяется как отношение полезной мощности на валу
Р
2 к потребляемой из сети
Р
1
η
= = (8)
Полезная мощность двигателя на валу Р
2 может быть определена по формуле
Р
2 =
М
∙ ω =
М
∙ , Вт (9)
или Р
2 = 0,105
М
∙
n
2, Вт. (10)
Тогда
η
= = = , (11)
где U
1ф, В;
I
1ф, А;
Cos
φф – напряжение, ток и коэффициент мощности фазы двигателя.
Р
1 – потребляемая активная мощность двигателя.
Коэффициент мощности Cos
φф зависит от нагрузки на валу двигателя и определяется отношением активной мощности к полной мощности фазы статора двигателя
Cos
φф = = (12)
В лабораторной работе коэффициент мощности Cos
φ измеряется непосредственно фазометром, а также может быть вычислен по показаниям ваттметра, вольтметра и амперметра, включенных в фазу двигателя (рис.1).
Основной характеристикой асинхронного двигателя, называемой механической, является зависимость n
2 =
f
(
M
), т.е. зависимость частоты вращения ротора двигателя от вращающего момента (рис.1).
Рис.1. Механическая характеристика асинхронного двигателя.
Вращающий момент асинхронного двигателя определяют по формуле
М
= , Нм (13)
где U
1ф – фазное напряжение обмотки статора, В;
n
1 – синхронная частота вращения магнитного поля статора, об/мин;
s
– скольжение;
р
– число пар полюсов;
R
1,
R
2’,
Х
к – параметры схемы замещения асинхронного двигателя, Ом (рис.2).
Рис.2. Схема замещения асинхронного двигателя.
Вращающий момент асинхронного двигателя в лабораторной работе измеряется по щкале электромагнитного тормоза, соединенного с валом двигателя, в г∙см (1 Нм = 9800 г∙см).
Вращающий момент асинхронного двигателя зависит от величины подводимого к фазе статора напряжения в квадрате , скольжения s
, частоты тока в статоре
f
1 и конструктивных параметров двигателя (числа пар полюсов, активного сопротивления обмоток двигателя и т.д.).
Меняя значение скольжения s
при остальных постоянных в формуле вращающего момента можно получить различные значения моментов
М
н,
М
кр,
М
п , показанных на естественной механической характеристике (рис.1) .
Номинальный вращающий момент М
н может быть определен по формулам
М
н = 9,55 , Нм (14)
или
М
н = 9,55 , Нм (15)
В каталоге на асинхронные двигатели указаны паспортные данные: Р
2н,
U
1н,
s
н,
n
2н,
М
н,
М
кр/
М
н,
Сos
φн и способ соединения обмоток статора.
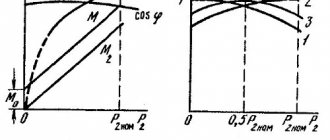
Наиболее полно и наглядно свойства асинхронного двигателя выявляются с помощью рабочих характеристик.
К рабочим характеристикам относятся зависимость частоты вращения ротора n
2, вращающего момента
М
, скольжения
s
тока фазы статора
I
1ф, коэффициента мощности
Сos
φ и к.п.д. двигателя от полезной мощности на валу
Р
2 при
U
1 =
Const
и
f
1 =
Const
.
При повышении Р
2 величина скольжения
s
увеличивается, т.к. при увеличении нагрузки на валу частота вращения ротора уменьшается (рис.3).
Рис.3. Зависисмость величины скольжения от полезной мощности на валу.
При холостом ходе, когда Р
2 = 0 , частота вращения ротора
n
2 может быть принята равной частоте вращения магнитного поля статора
n
1 и
s
= 0.
Так как Р
2 ≈
Р
мех , а
Р
мех = 0,105
М
∙
n
2, то рабочая характеристика
n
2 =
f
(
Р
2) подобна механической характеристике (рис.4).
Рис.4. Механическая характеристика асинхронного двигателя.
Вращающий момент М
на валу ротора можно считать состоящим из полезного момента, расходуемого на совершение полезной работы, и момента холостого хода
М
0, расходуемого на преодоление трения. Эта доля вращающего момента практически не зависит от нагрузки на валу
Р
2.
Таким образом, можно считать, что М
≈ . Если бы частота вращения ротора была постоянной, то рабочая характеристика была бы линейно возрастающей. В действительности же частота вращения ротора
n
2 уменьшается при увеличении
Р
2, в связи с этим характеристика
М
=
f
(
Р
2) нелинейна и вращающий момент
М
быстро нарастает с увеличением
Р
2 (рис.5).
Рис.5. Зависимость М
=
f
(
Р
2)
Кривая I
1ф =
f
(
Р
2) подобна рабочей характеристике
М
=
f
(
Р
2) (рис.6).
Рис.5. Зависимость I
1ф =
f
(
Р
2)
Если не учитывать ток холостого хода двигателя, составляющий 7…8% от I
1ф , то ток в фазе статора пропорционален полезной мощности
Р
2 и увеличивается при ее повышении. При холостом ходе
Р
2 = 0 и
I
1ф =
I
10 (рис. 5).
При холостом ходе двигателя коэффициент мощности Cos
φ двигателя мал и обычно не превышает 0,2, но затем при увеличении нагрузки на валу
Р
2 он быстро растет и достигает максимума при мощности, близкой к номинальной (рис. 6). Это происходит потому, что при возрастании нагрузки активная мощность
Р
1, потребляемая из сети, увеличивается, а реактивная мощность
Q
1 почти не изменяется. Вследствие этого главный магнитный поток практически остается постоянным. При нагрузках больше номинальных
Cos
φ снижается в связи со значительным ростом реактивных мощностей, связанных с влиянием потоков рассеяния.
Рис.6. Зависимость Cos
φ =
f
(
Р
2)
Анализируя зависимость η
=
f
(
Р
2) , можно видеть, что при изменении нагрузки на валу
Р
2 постоянные потери Δ
Р
тр и Δ
Р
ст практически не изменяются, а начальный момент увеличение потерь в активном сопротивлении обмоток Δ
Р
э значительно меньше роста полезной мощности на валу. При
Р
2 =
Р
2н постоянные потери Δ
Р
тр и Δ
Р
ст становятся равными переменным Δ
Р
э , а доля потерь в энергетическом балансе уже становится соизмеримой с
Р
2 . Вследствие этого к.п.д. начинает несколько уменьшаться (рис. 7).
Рис.7. Зависимость η
=
f
(
Р
2)
План работы.
1. Ознакомиться с конструкцией асинхронного двигателя, типами измерительных приборов, устройством электромагнитного тормоза. В форму, предусмотренную отчетом по лабораторной работе, записать технические данные используемых приборов и электрооборудования.
2. Собрать электрическую схему (рис. и предъявить ее для проверки преподавателю или лаборанту.
3. После проверки схемы поставить регулятор автотрансформатора (АТ) в положение «0» и включить выпрямитель.
4. Включить фототахометр и нажать кнопку «Пуск» на электрическом стенде.
5. При помощи автотрансформатора (АТ) изменить момент сопротивления электромагнитного тормоза в пределах 0…0,01 Нм (0,100.200,300,400,500,600,700,800,900,1000 г∙см).
6. Измерить по приборам следующие величины: напряжение на фазе двигателя U
1ф по вольтметру V, ток в фазе
I
1ф по амперметру А1, потребляемую фазой двигателя активную мощность
P
1ф по ваттметру W, частоту вращения ротора
n
по фототахометру.
Измерения произвести для 11 различных моментов сопротивления на валу двигателя.
Данные опытов внести в табл.2.
Таблица 2
| № п/п | Измеренные величины | Вычисленные величины | |||||||||
| М Нм | U 1ф В | I 1ф А | P 1ф Вт | n 2 об/мин | Cos φ | М Нм | P 2 Вт | P 1 Вт | S 1 ВА | Cos φ | s |
| … |
7. По окончании измерений нажать кнопку «Стоп», обесточить схему и показать результаты преподавателю.
8. После получения разрешения преподавателя разобрать схему.
9. По измеренным данным вычислить вращающий момент на валу двигателя М
, Нм; полезную мощность на валу
P
2 , Вт; активную мощность, потребляемую двигателем
P
1 , Вт; полную мощность, потребляемую двигателем
S
1 ; скольжение
s
; коэффициент мощности
Cos
φ и коэффициент полезного действия
η
.
10. По измеренным и вычисленным данным построить на миллиметровой бумаге характеристики двигателя:
а) механическую характеристику n
2 =
f
(
M
) ;
б) рабочие характеристики s
=
f
(
Р
2);
n
2 =
f
(
Р
2);
M
=
f
(
Р
2);
I
1ф =
f
(
Р
2).
в) рабочую характеристику Cos
φ =
f
(
Р
2) , измеренную и вычисленную.
11. Материалы измерений и вычислений, полученные характеристики оформить в виде отчета по лабораторной работе.
Рис. 8. Электрическая схема исследования трехфазного асинхронного двигателя с короткозамкнутым ротором:
А1 – амперметр переменного тока на 1 А; А2 – амперметр постоянного тока на 1 А; W – ваттметр на 150 Вт; Ф – фазометр на 127 В 5 А в положении «приемник»; V – вольтметр переменного тока на 150 В; АТ – автотрансформатор; ЭТ – электромагнитный тормоз.
Контрольные вопросы
1. Устройство и принцип работы асинхронного двигателя.
2. Что такое скольжение (s
хх,
s
пуск)?
3. Почему двигатель называется асинхронным?
4. Условие возникновения вращающегося магнитного поля.
5. Стандартные величины n
1 (частота вращения магнитного
поля).
6. Режим холостого хода асинхронного двигателя.
7. Почему I
xx асинхронного двигателя больше чем
I
0 трансформатора.
8. Схема замещения асинхронного двигателя в режиме холостого хода.
9. Упрощенная схема замещения.
10.Почему I
пуск асинхронного двигателя в 6…8 раз больше
I
н?
11 .Механическая характеристика асинхронного двигателя n
=
f
(
M
);
n
=
f
(
s
) (естественная и реостатная).
12.Формула Клосса.
13.Регулирование числа оборотов асинхронного двигателя.
14.Достоинства и недостатки каждого метода.
15.Типы роторов (короткозамкнутый и фазный).
16.Предназначение фазного ротора.
17.Метод ограничения I
пуск у асинхронного двигателя с короткозамкнутым ротором.
18. Метод ограничения I
пуск у асинхронного двигателя с фазным ротором.
19.Энергетическая диаграмма. Потери мощности в асинхронном двигателе.
20.КПД асинхронного двигателя.
21.Достоинства и недостатки асинхронного двигателя.
Трехфазный асинхронный двигатель
Целью работы
является изучение работы асинхронного двигателя с короткозамкнутым ротором и снятие его механической и рабочей характеристик.
Краткие теоретические сведения
Простота конструкции, надежность в работе, экономичность и невысокая стоимость являются основными причинами широкого использования асинхронных двигателей в промышленности.
Частота вращения магнитного поля статора n
1 определяется по формуле
n
1 = , об/мин (1)
где f
1 — частота сети, Гц;
р
— число пар полюсов.
Разность в частотах вращения ротора n
2 и поля статора
n
1 выражают скольжением
s
= (2)
Скольжение возрастает с увеличением нагрузки на валу двигателя. У современных двигателей в зависимости от серии и назначения скольжение при номинальной нагрузке составляет 2…8%. При холостом ходе скольжение составляет всего 0,1…0,3%.
Если считать скольжение при номинальной нагрузке s
н равным 5%, то можно указать частоты вращения ротора асинхронных двигателей при питании от сети с
f
= 50 Гц.
Таблица 1.
| Частота вращения при s н = 5% | Число пар полюсов на статоре |
| Поля статора n 1, об\мин | |
| Ротора n 2, об\мин |
Асинхронные двигатели малой и средней мощности, благодаря возможности соединения обмоток статора по схеме Y/Δ или Δ/ Y, могут работать при питании от двух соответствующих напряжений 380/220 В.
На заводском щитке двигателя это обозначается как
Y/Δ, 380/220 В.
Простейшим способом пуска в ход двигателя с короткозамкнутым ротором и номинальной мощностью до 100 кВт является непосредственное включение обмотки статора в трехфазную цепь.
Частота вращения ротора двигателя может быть выражена формулой
n
1 = (1–
s
1), об/мин. (3)
Электрическая мощность Р
1, потребляемая асинхронным двигателем от сети, расходуется на полезную мощность
Р
2 на валу и потери мощности на нагрев обмоток статора и ротора Δ
Р
э1 и Δ
Р
э2, потери в магнитопроводе статора и в стали ротора от вихревых токов и на гистерезис Δ
Р
ст и на потери от трения в подшипниках Δ
Р
тр.
Таким образом,баланс мощности в двигателе выразится так
Р
1 =
Р
2 + Δ
Р
тр + Δ
Р
э + Δ
Р
ст, Вт. (4)
Активная мощность двигателя, потребляемая из сети, вычисляется по формуле
Р
1 = 3
Р
1ф, Вт, (5)
где Р
1ф =
U
1ф ∙
I
1 – мощность одной фазы, измеренная ваттметром, Вт.
Механическая мощность, развиваемая на валу двигателя, Р
мех складывается из полезной мощности на валу
Р
2 и потерь на трение
Р
тр
Р
мех =
Р
2 +
Р
тр, Вт. (6)
Механическая мощность может быть определена по формуле
Р
мех = 0,105
М
∙
n
2, Вт, (7)
где М
– вращающий момент, Нм;
n
2 – частота вращения ротора, об\мин.
Магнитные потери в магнитопроводе статора, т.е. потери в стали ΔР
ст, практически не изменяются при увеличении нагрузки на валу
Р
2 и называются постоянными.
С другой стороны, потери на нагрев обмоток статора и ротора, т.е. потери в меди ΔР
э зависят от нагрузки и называются переменными.
Коэффициент полезного действия асинхронного двигателя η
определяется как отношение полезной мощности на валу
Р
2 к потребляемой из сети
Р
1
η
= = (8)
Полезная мощность двигателя на валу Р
2 может быть определена по формуле
Р
2 =
М
∙ ω =
М
∙ , Вт (9)
или Р
2 = 0,105
М
∙
n
2, Вт. (10)
Тогда
η
= = = , (11)
где U
1ф, В;
I
1ф, А;
Cos
φф – напряжение, ток и коэффициент мощности фазы двигателя.
Р
1 – потребляемая активная мощность двигателя.
Коэффициент мощности Cos
φф зависит от нагрузки на валу двигателя и определяется отношением активной мощности к полной мощности фазы статора двигателя
Cos
φф = = (12)
В лабораторной работе коэффициент мощности Cos
φ измеряется непосредственно фазометром, а также может быть вычислен по показаниям ваттметра, вольтметра и амперметра, включенных в фазу двигателя (рис.1).
Основной характеристикой асинхронного двигателя, называемой механической, является зависимость n
2 =
f
(
M
), т.е. зависимость частоты вращения ротора двигателя от вращающего момента (рис.1).
Рис.1. Механическая характеристика асинхронного двигателя.
Вращающий момент асинхронного двигателя определяют по формуле
М
= , Нм (13)
где U
1ф – фазное напряжение обмотки статора, В;
n
1 – синхронная частота вращения магнитного поля статора, об/мин;
s
– скольжение;
р
– число пар полюсов;
R
1,
R
2’,
Х
к – параметры схемы замещения асинхронного двигателя, Ом (рис.2).
Рис.2. Схема замещения асинхронного двигателя.
Вращающий момент асинхронного двигателя в лабораторной работе измеряется по щкале электромагнитного тормоза, соединенного с валом двигателя, в г∙см (1 Нм = 9800 г∙см).
Вращающий момент асинхронного двигателя зависит от величины подводимого к фазе статора напряжения в квадрате , скольжения s
, частоты тока в статоре
f
1 и конструктивных параметров двигателя (числа пар полюсов, активного сопротивления обмоток двигателя и т.д.).
Меняя значение скольжения s
при остальных постоянных в формуле вращающего момента можно получить различные значения моментов
М
н,
М
кр,
М
п , показанных на естественной механической характеристике (рис.1) .
Номинальный вращающий момент М
н может быть определен по формулам
М
н = 9,55 , Нм (14)
или
М
н = 9,55 , Нм (15)
В каталоге на асинхронные двигатели указаны паспортные данные: Р
2н,
U
1н,
s
н,
n
2н,
М
н,
М
кр/
М
н,
Сos
φн и способ соединения обмоток статора.
Наиболее полно и наглядно свойства асинхронного двигателя выявляются с помощью рабочих характеристик.
К рабочим характеристикам относятся зависимость частоты вращения ротора n
2, вращающего момента
М
, скольжения
s
тока фазы статора
I
1ф, коэффициента мощности
Сos
φ и к.п.д. двигателя от полезной мощности на валу
Р
2 при
U
1 =
Const
и
f
1 =
Const
.
При повышении Р
2 величина скольжения
s
увеличивается, т.к. при увеличении нагрузки на валу частота вращения ротора уменьшается (рис.3).
Рис.3. Зависисмость величины скольжения от полезной мощности на валу.
При холостом ходе, когда Р
2 = 0 , частота вращения ротора
n
2 может быть принята равной частоте вращения магнитного поля статора
n
1 и
s
= 0.
Так как Р
2 ≈
Р
мех , а
Р
мех = 0,105
М
∙
n
2, то рабочая характеристика
n
2 =
f
(
Р
2) подобна механической характеристике (рис.4).
Рис.4. Механическая характеристика асинхронного двигателя.
Вращающий момент М
на валу ротора можно считать состоящим из полезного момента, расходуемого на совершение полезной работы, и момента холостого хода
М
0, расходуемого на преодоление трения. Эта доля вращающего момента практически не зависит от нагрузки на валу
Р
2.
Таким образом, можно считать, что М
≈ . Если бы частота вращения ротора была постоянной, то рабочая характеристика была бы линейно возрастающей. В действительности же частота вращения ротора
n
2 уменьшается при увеличении
Р
2, в связи с этим характеристика
М
=
f
(
Р
2) нелинейна и вращающий момент
М
быстро нарастает с увеличением
Р
2 (рис.5).
Рис.5. Зависимость М
=
f
(
Р
2)
Кривая I
1ф =
f
(
Р
2) подобна рабочей характеристике
М
=
f
(
Р
2) (рис.6).
Рис.5. Зависимость I
1ф =
f
(
Р
2)
Если не учитывать ток холостого хода двигателя, составляющий 7…8% от I
1ф , то ток в фазе статора пропорционален полезной мощности
Р
2 и увеличивается при ее повышении. При холостом ходе
Р
2 = 0 и
I
1ф =
I
10 (рис. 5).
При холостом ходе двигателя коэффициент мощности Cos
φ двигателя мал и обычно не превышает 0,2, но затем при увеличении нагрузки на валу
Р
2 он быстро растет и достигает максимума при мощности, близкой к номинальной (рис. 6). Это происходит потому, что при возрастании нагрузки активная мощность
Р
1, потребляемая из сети, увеличивается, а реактивная мощность
Q
1 почти не изменяется. Вследствие этого главный магнитный поток практически остается постоянным. При нагрузках больше номинальных
Cos
φ снижается в связи со значительным ростом реактивных мощностей, связанных с влиянием потоков рассеяния.
Рис.6. Зависимость Cos
φ =
f
(
Р
2)
Анализируя зависимость η
=
f
(
Р
2) , можно видеть, что при изменении нагрузки на валу
Р
2 постоянные потери Δ
Р
тр и Δ
Р
ст практически не изменяются, а начальный момент увеличение потерь в активном сопротивлении обмоток Δ
Р
э значительно меньше роста полезной мощности на валу. При
Р
2 =
Р
2н постоянные потери Δ
Р
тр и Δ
Р
ст становятся равными переменным Δ
Р
э , а доля потерь в энергетическом балансе уже становится соизмеримой с
Р
2 . Вследствие этого к.п.д. начинает несколько уменьшаться (рис. 7).
Рис.7. Зависимость η
=
f
(
Р
2)
План работы.
1. Ознакомиться с конструкцией асинхронного двигателя, типами измерительных приборов, устройством электромагнитного тормоза. В форму, предусмотренную отчетом по лабораторной работе, записать технические данные используемых приборов и электрооборудования.
2. Собрать электрическую схему (рис. и предъявить ее для проверки преподавателю или лаборанту.
3. После проверки схемы поставить регулятор автотрансформатора (АТ) в положение «0» и включить выпрямитель.
4. Включить фототахометр и нажать кнопку «Пуск» на электрическом стенде.
5. При помощи автотрансформатора (АТ) изменить момент сопротивления электромагнитного тормоза в пределах 0…0,01 Нм (0,100.200,300,400,500,600,700,800,900,1000 г∙см).
6. Измерить по приборам следующие величины: напряжение на фазе двигателя U
1ф по вольтметру V, ток в фазе
I
1ф по амперметру А1, потребляемую фазой двигателя активную мощность
P
1ф по ваттметру W, частоту вращения ротора
n
по фототахометру.
Измерения произвести для 11 различных моментов сопротивления на валу двигателя.
Данные опытов внести в табл.2.
Таблица 2
| № п/п | Измеренные величины | Вычисленные величины | |||||||||
| М Нм | U 1ф В | I 1ф А | P 1ф Вт | n 2 об/мин | Cos φ | М Нм | P 2 Вт | P 1 Вт | S 1 ВА | Cos φ | s |
| … |
7. По окончании измерений нажать кнопку «Стоп», обесточить схему и показать результаты преподавателю.
8. После получения разрешения преподавателя разобрать схему.
9. По измеренным данным вычислить вращающий момент на валу двигателя М
, Нм; полезную мощность на валу
P
2 , Вт; активную мощность, потребляемую двигателем
P
1 , Вт; полную мощность, потребляемую двигателем
S
1 ; скольжение
s
; коэффициент мощности
Cos
φ и коэффициент полезного действия
η
.
10. По измеренным и вычисленным данным построить на миллиметровой бумаге характеристики двигателя:
а) механическую характеристику n
2 =
f
(
M
) ;
б) рабочие характеристики s
=
f
(
Р
2);
n
2 =
f
(
Р
2);
M
=
f
(
Р
2);
I
1ф =
f
(
Р
2).
в) рабочую характеристику Cos
φ =
f
(
Р
2) , измеренную и вычисленную.
11. Материалы измерений и вычислений, полученные характеристики оформить в виде отчета по лабораторной работе.
Рис. 8. Электрическая схема исследования трехфазного асинхронного двигателя с короткозамкнутым ротором:
А1 – амперметр переменного тока на 1 А; А2 – амперметр постоянного тока на 1 А; W – ваттметр на 150 Вт; Ф – фазометр на 127 В 5 А в положении «приемник»; V – вольтметр переменного тока на 150 В; АТ – автотрансформатор; ЭТ – электромагнитный тормоз.
Контрольные вопросы
1. Устройство и принцип работы асинхронного двигателя.
2. Что такое скольжение (s
хх,
s
пуск)?
3. Почему двигатель называется асинхронным?
4. Условие возникновения вращающегося магнитного поля.
5. Стандартные величины n
1 (частота вращения магнитного
поля).
6. Режим холостого хода асинхронного двигателя.
7. Почему I
xx асинхронного двигателя больше чем
I
0 трансформатора.
8. Схема замещения асинхронного двигателя в режиме холостого хода.
9. Упрощенная схема замещения.
10.Почему I
пуск асинхронного двигателя в 6…8 раз больше
I
н?
11 .Механическая характеристика асинхронного двигателя n
=
f
(
M
);
n
=
f
(
s
) (естественная и реостатная).
12.Формула Клосса.
13.Регулирование числа оборотов асинхронного двигателя.
14.Достоинства и недостатки каждого метода.
15.Типы роторов (короткозамкнутый и фазный).
16.Предназначение фазного ротора.
17.Метод ограничения I
пуск у асинхронного двигателя с короткозамкнутым ротором.
18. Метод ограничения I
пуск у асинхронного двигателя с фазным ротором.
19.Энергетическая диаграмма. Потери мощности в асинхронном двигателе.
20.КПД асинхронного двигателя.
21.Достоинства и недостатки асинхронного двигателя.
Расчет мощности ДВС по производительности форсунок
Не менее эффективным показателем мощности автомобильного двигателя является производительность форсунок. Ранее мы рассматривали её расчет и взаимосвязь, поэтому, труда, высчитать количество лошадиных сил по формуле, не составит. Подсчет предполагаемой мощности происходит по такой схеме:
Где, коэффициент загруженности не более 75-80% (0,75…0,8) состав смеси на максимальной производительности где-то 12,5 (обогащенная), а коэффициент BSFC будет зависеть от того какой это у вас двигатель, атмосферный или турбированный (атмо — 0.4-0.52, для турбо — 0.6-0.75).
Узнав все необходимые данные, вводите в соответствующие ячейки калькулятора показатели и по нажатию кнопки «Рассчитать» Вы сразу же получаете результат, который покажет реальную мощность двигателя вашего авто с незначительной погрешностью. Заметьте, что вам совсем не обязательно знать все представленные параметры, можно расчищать мощность ДВС отдельно взятым методом.
Ценность функционала данного калькулятора заключается не в расчете мощности стокового автомобиля, а если ваш автомобиль подвергся тюнингу и его масса и мощность притерпели некоторые изменения.
Активная реактивная и полная мощность
Содержание:
- Формулы активной, реактивной и полной мощности
- Как найти активную, реактивную и полную мощность
- Видео
В электротехнике среди множества определений довольно часто используются такие понятия, как активная, реактивная и полная мощность. Эти параметры напрямую связаны с током и напряжением в замкнутой электрической цепи, когда включены какие-либо потребители. Для проведения вычислений применяются различные формулы, среди которых основной является произведение напряжения и силы тока. Прежде всего это касается постоянного напряжения. Однако в цепях переменного тока мощность разделяется на несколько составляющих, отмеченных выше. Вычисление каждой из них также осуществляется с помощью формул, благодаря которым можно получить точные результаты.
Формулы активной, реактивной и полной мощности
Основной составляющей считается активная мощность. Она представляет собой величину, характеризующую процесс преобразования электрической энергии в другие виды энергии. То есть по-другому является скоростью, с какой потребляется электроэнергия. Именно это значение отображается на электросчетчике и оплачивается потребителями. Вычисление активной мощности выполняется по формуле: P = U x I x cosф.
В отличие от активной, которая относится к той энергии, которая непосредственно потребляется электроприборами и преобразуется в другие виды энергии – тепловую, световую, механическую и т.д., реактивная мощность является своеобразным невидимым помощником. С ее участием создаются электромагнитные поля, потребляемые электродвигателями. Прежде всего она определяет характер нагрузки, и может не только генерироваться, но и потребляться. Расчеты реактивной мощности производятся по формуле: Q = U x I x sinф.
Полной мощностью является величина, состоящая из активной и реактивной составляющих. Именно она обеспечивает потребителям необходимое количество электроэнергии и поддерживает их в рабочем состоянии. Для ее расчетов применяется формула: S = .
Как найти активную, реактивную и полную мощность
Активная мощность относится к энергии, которая необратимо расходуется источником за единицу времени для выполнения потребителем какой-либо полезной работы. В процессе потребления, как уже было отмечено, она преобразуется в другие виды энергии.
В цепи переменного тока значение активной мощности определяется, как средний показатель мгновенной мощности за установленный период времени. Следовательно, среднее значение за этот период будет зависеть от угла сдвига фаз между током и напряжением и не будет равной нулю, при условии присутствия на данном участке цепи активного сопротивления. Последний фактор и определяет название активной мощности. Именно через активное сопротивление электроэнергия необратимо преобразуется в другие виды энергии.
При выполнении расчетов электрических цепей широко используется понятие реактивной мощности. С ее участием происходят такие процессы, как обмен энергией между источниками и реактивными элементами цепи. Данный параметр численно будет равен амплитуде, которой обладает переменная составляющая мгновенной мощности цепи.
Существует определенная зависимость реактивной мощности от знака угла ф, отображенного на рисунке. В связи с этим, она будет иметь положительное или отрицательное значение. В отличие от активной мощности, измеряемой в ваттах, реактивная мощность измеряется в вар – вольт-амперах реактивных. Итоговое значение реактивной мощности в разветвленных электрических цепях представляет собой алгебраическую сумму таких же мощностей у каждого элемента цепи с учетом их индивидуальных характеристик.
Основной составляющей полной мощности является максимально возможная активная мощность при заранее известных токе и напряжении. При этом, cosф равен 1, когда отсутствует сдвиг фаз между током и напряжением. В состав полной мощности входит и реактивная составляющая, что хорошо видно из формулы, представленной выше. Единицей измерения данного параметра служит вольт-ампер (ВА).
electric-220.ru
Часто задаваемые вопросы
Как рассчитать мощность двигателя внутреннего сгорания?
Мощность двигателя в кВт можно рассчитать по объему двигателя и оборотах коленвала. Формула расчета мощности двигателя имеет вид: Ne = Vh * Pe * n / 120 (кВт), где: Vh — объём двигателя, см³ n — количество оборотов коленчатого вала за минуту Pe — среднее эффективное давление, Мпа
Какой коэффициент учитывать при расчете мощности двигателя?
Коэффициент мощности (cosϕ) для расчета мощности электродвигателя принимают равным 0,8 для маломощных двигателей (менее 5,5 кВт) или 0,9 для двигателей мощностью свыше 15 кВт.
Как рассчитать мощность двигателя по крутящему моменту?
Для определения мощности двигателя в киловаттах, когда известен крутящий момент, можно по формуле такого вида: P = Mкр * n/9549, где: Mкр – крутящий момент (Нм), n – обороты коленвала (об./мин.), 9549 – коэффициент для перевода оборотов в об/мин.
Что такое электродвигатель?
Электрический двигатель представляет собой устройство, которое преобразует электрическую энергию в механическую. Работа большинства агрегатов зависит от взаимодействия магнитного поля с обмоткой ротора, которая выражается в его вращении. Функционируют они от источников питания постоянного или переменного тока. В качестве питающего элемента может выступать аккумулятор, инвертор или розетка электросети. В некоторых случаях двигатель работает в обратном порядке, то есть преобразует механическую энергию в электрическую. Такие установки находят широкое применение на электростанциях, работающие от потока воздуха или воды.
Электродвигатели классифицируют по типу источника питания, внутренней конструкции, применению и мощности. Также приводы переменного тока могут иметь специальные щетки. Они функционируют от однофазного, двухфазного или трехфазного напряжения, имеют воздушное или жидкостное охлаждение. Формула мощности электродвигателя переменного тока
P = U х I,
где P — мощность, U — напряжение, I — сила тока.
Приводы общего назначения со своими размерами и характеристиками находят применение в промышленности. Самые большие двигатели мощностью более 100 Мегаватт используют на силовых установках кораблей, компрессорных и насосных станций. Меньшего размера используют в бытовых приборах, как пылесос или вентилятор.
Смотрите также
Асинхронный двигатель применение в быту- Асинхронный двигатель со встроенным энкодером
- Укладка обмотки статора асинхронного двигателя
- Асинхронный двигатель аир 80в2 у3
- Как увеличить мощность асинхронного двигателя
- Асинхронный двигатель с экранированными полюсами
- Двигатель асинхронный аве 072 4у4
- Как увеличить обороты асинхронного двигателя
Асинхронные двигатели с совмещенными обмотками- Сравнение асинхронных и синхронных двигателей
- Схема асинхронного двигателя торможение противовключением
Что такое полная, активная и реактивная мощность?
ЧТО ТАКОЕ ПОЛНАЯ, АКТИВНАЯ И РЕАКТИВНАЯ МОЩНОСТЬ? ОТ СЛОЖНОГО К ПРОСТОМУ.
В повседневной жизни практически каждый сталкивается с понятием «электрическая мощность», «потребляемая мощность» или «сколько эта штука «кушает» электричества». В данной подборке мы раскроем понятие электрической мощности переменного тока для технически подкованных специалистов и покажем на картинке электрическую мощность в виде «сколько эта штука кушает электричества» для людей с гуманитарным складом ума :-). Мы раскрываем наиболее практичное и применимое понятие электрической мощности и намеренно уходим от описания дифференциальных выражений электрической мощности.
ЧТО ТАКОЕ МОЩНОСТЬ ПЕРЕМЕННОГО ТОКА?
В цепях переменного тока формула для мощности постоянного тока может быть применена лишь для расчёта мгновенной мощности, которая сильно изменяется во времени и для практических расчётов бесполезна. Прямой расчёт среднего значения мощности требует интегрирования по времени. Для вычисления мощности в цепях, где напряжение и ток изменяются периодически, среднюю мощность можно вычислить, интегрируя мгновенную мощность в течение периода. На практике наибольшее значение имеет расчёт мощности в цепях переменного синусоидального напряжения и тока.
Для того, чтобы связать понятия полной, активной, реактивной мощностей и коэффициента мощности, удобно обратиться к теории комплексных чисел. Можно считать, что мощность в цепи переменного тока выражается комплексным числом таким, что активная мощность является его действительной частью, реактивная мощность — мнимой частью, полная мощность — модулем, а угол φ (сдвиг фаз) — аргументом. Для такой модели оказываются справедливыми все выписанные ниже соотношения.
Активная мощность (Real Power)
Единица измерения — ватт (русское обозначение: Вт, киловатт — кВт; международное: ватт -W, киловатт — kW).
Среднее за период Τ значение мгновенной мощности называется активной мощностью, и
выражается формулой:
В цепях однофазного синусоидального тока , где υ и Ι это среднеквадратичные значения напряжения и тока, а φ — угол сдвига фаз между ними.Для цепей несинусоидального тока электрическая мощность равна сумме соответствующих средних мощностей отдельных гармоник. Активная мощность характеризует скорость необратимого превращения электрической энергии в другие виды энергии (тепловую и электромагнитную). Активная мощность может быть также выражена через силу тока, напряжение и активную составляющую сопротивления цепи r или её проводимость g по формуле . В любой электрической цепи как синусоидального, так и несинусоидального тока активная мощность всей цепи равна сумме активных мощностей отдельных частей цепи, для трёхфазных цепей электрическая мощность определяется как сумма мощностей отдельных фаз. С полной мощностью S, активная связана соотношением .
В теории длинных линий (анализ электромагнитных процессов в линии передачи, длина которой сравнима с длиной электромагнитной волны) полным аналогом активной мощности является проходящая мощность, которая определяется как разность между падающей мощностью и отраженной мощностью.
Реактивная мощность (Reactive Power)
Единица измерения — вольт-ампер реактивный (русское обозначение: вар, кВАР; международное: var).
Реактивная мощность — величина, характеризующая нагрузки, создаваемые в электротехнических устройствах колебаниями энергии электромагнитного поля в цепи синусоидального переменного тока, равна произведению среднеквадратичных значений напряжения U и тока I, умноженному на синус угла сдвига фаз φ между ними:
(если ток отстаёт от напряжения, сдвиг фаз считается положительным, если опережает — отрицательным). Реактивная мощность связана с полной мощностью S и активной мощностью P соотношением: .
Физический смысл реактивной мощности — это энергия, перекачиваемая от источника на реактивные элементы приёмника (индуктивности, конденсаторы, обмотки двигателей), а затем возвращаемая этими элементами обратно в источник в течение одного периода колебаний, отнесённая к этому периоду.
Необходимо отметить, что величина sin φ для значений φ от 0 до плюс 90° является положительной величиной. Величина sin φ для значений φ от 0 до минус 90° является отрицательной величиной. В соответствии с формулой
реактивная мощность может быть как положительной величиной (если нагрузка имеет активно-индуктивный характер), так и отрицательной (если нагрузка имеет активно-ёмкостный характер). Данное обстоятельство подчёркивает тот факт, что реактивная мощность не участвует в работе электрического тока. Когда устройство имеет положительную реактивную мощность, то принято говорить, что оно её потребляет, а когда отрицательную — то производит, но это чистая условность, связанная с тем, что большинство электропотребляющих устройств (например,асинхронные двигатели), а также чисто активная нагрузка, подключаемая через трансформатор, являются активно-индуктивными.
Синхронные генераторы, установленные на электрических станциях, могут как производить, так и потреблять реактивную мощность в зависимости от величины тока возбуждения, протекающего в обмотке ротора генератора. За счёт этой особенности синхронных электрических машин осуществляется регулирование заданного уровня напряжения сети. Для устранения перегрузок и повышения коэффициента мощности электрических установок осуществляется компенсация реактивной мощности.
Применение современных электрических измерительных преобразователей на микропроцессорной технике позволяет производить более точную оценку величины энергии возвращаемой от индуктивной и емкостной нагрузки в источник переменного напряжения.
Мощность может быть как положительной величиной (если нагрузка имеет активно-индуктивный характер), так и отрицательной (если нагрузка имеет активно-ёмкостный характер). Данное обстоятельство подчёркивает тот факт, что реактивная мощность не участвует в работе электрического тока. Когда устройство имеет положительную реактивную мощность, то принято говорить, что оно её потребляет, а когда отрицательную — то производит, но это чистая условность, связанная с тем, что большинство электропотребляющих устройств (например,асинхронные двигатели), а также чисто активная нагрузка, подключаемая через трансформатор, являются активно-индуктивными.
Синхронные генераторы, установленные на электрических станциях, могут как производить, так и потреблять реактивную мощность в зависимости от величины тока возбуждения, протекающего в обмотке ротора генератора. За счёт этой особенности синхронных электрических машин осуществляется регулирование заданного уровня напряжения сети. Для устранения перегрузок и повышения коэффициента мощности электрических установок осуществляется компенсация реактивной мощности.
Применение современных электрических измерительных преобразователей на микропроцессорной технике позволяет производить более точную оценку величины энергии возвращаемой от индуктивной и емкостной нагрузки в источник переменного напряжения
Полная мощность (Apparent Power)
Единица полной электрической мощности — вольт-ампер (русское обозначение: В·А, ВА, кВА-кило-вольт-ампер; международное: V·A, kVA).
Полная мощность — величина, равная произведению действующих значений периодического электрического тока I в цепи и напряжения U на её зажимах: ; соотношение полной мощности с активной и реактивной мощностями выражается в следующем виде: где P — активная мощность, Q — реактивная мощность (при индуктивной нагрузке Q›0, а при ёмкостной Q‹0). Векторная зависимость между полной, активной и реактивной мощностью выражается формулой:
Полная мощность имеет практическое значение, как величина, описывающая нагрузки, фактически налагаемые потребителем на элементы подводящей электросети (провода, кабели, распределительные щиты, трансформаторы, линии электропередачи), так как эти нагрузки зависят от потребляемого тока, а не от фактически использованной потребителем энергии. Именно поэтому полная мощность трансформаторов и распределительных щитов измеряется в вольт-амперах, а не в ваттах.
Визуально и интуитивно-понятно все вышеперечисленные формульные и текстовые описания полной, реактивной и активной мощностей передает следующий рисунок
Специалисты компании НТС-групп (ТМ Электрокапризам-НЕТ) имеют огромный опыт подбора специализированного оборудования для построения систем обеспечения жизненно важных объектов бесперебойным электропитанием. Мы умеем максимально качественно учитывать множество электрических и эксплуатационных параметров, которые позволяют выбрать экономически обоснованный вариант построения системы бесперебойного электропитания.
© Материал подготовлен специалистами компании НТС-групп (ТМ Электрокапризам-НЕТ) с использованием информации из открытых источников, в т.ч. из свободной энциклопедии ВикипедиЯ https://ru.wikipedia.org
electrokaprizam.net