Двигатель постоянного тока. Схемы соединения и характеристики ДПТ
Двигатель постоянного тока нашел широкое применение в различных областях деятельности человека. Начиная от использования тягового привода, применяемого в трамваях и троллейбусах, заканчивая приводом прокатных станов и подъемных механизмов, где требуется поддержание высокой точности скорости вращения.
Основные положительные особенности, которые отличают ДПТ от асинхронного двигателя:
| — гибкие пусковые и регулировочные характеристики; |
| — двухзонное регулирование, которое позволяет достигать скорости вращения более 3000 об/мин. |
Отрицательные черты:
| — сложность в изготовлении и высокая стоимость; |
| — в процессе работы необходимо постоянное обслуживание, так как коллектор и токосъемные щетки имеют небольшой ресурс работы. |
Двигатель постоянного тока применяют только тогда, когда применение двигателя переменного тока невозможно или крайне нецелесообразно. В среднем, на каждые 70 двигателей переменного тока приходится всего лишь 1 ДПТ.
Конструкция ДПТ
Двигатель постоянного тока состоит из:
| — индуктора (статора); |
| — якоря (ротора); |
| — коллектора; |
| — токосъемных щеток; |
| — конструктивных элементов. |
Якорь и индуктор разделены между собой воздушным зазором. Индуктор представляет из себя станину, которая служит для того, чтобы закрепить основные и добавочные полюса магнитной системы двигателя. На основных полюсах располагаются обмотки возбуждения, а на добавочных – специальные обмотки, которые способствуют улучшению коммутации.
Коллектор подводит постоянный ток к рабочей обмотке, которая уложена в пазы ротора. Коллектор имеет вид цилиндра и состоит из пластин, изолированных друг от друга, он насажен на вал двигателя. Щетки служат для съема тока с коллектора, они крепятся в щеткодержателях для обеспечения правильного положения и надежного нажатия на поверхность коллектора.
Рисунок 1 – Конструкция двигателя постоянного тока
Двигатели постоянного тока классифицируют по магнитной системе статора:
1) ДПТ с постоянными магнитами;
2) ДПТ с электромагнитами:
| — ДПТ с независимым возбуждением; |
| — ДПТ с последовательным возбуждением; |
| — ДПТ с параллельным возбуждением; |
| — ДПТ со смешанным возбуждением. |
Рисунок 2 – Схемы подключения двигателя постоянного тока
Схема подключения обмоток статора существенно влияет на электрические и тяговые характеристики привода.
Пуск двигателя постоянного тока
Пуск двигателя постоянного тока производят с помощью пусковых реостатов, которые представляют собой активные сопротивления, подключенные к цепи якоря. Выполняют реостатный пуск по двум причинам:
| — при необходимости плавного разгона электродвигателя; |
| — в начальный момент времени, пусковой ток Iп = U / Rя очень большой, что вызывает перегрев обмотки якоря (которая имеет малое сопротивление). |
Только ДПТ мощностью до 1 кВт допускают к старту без пусковых реостатов, так называемый «прямой пуск».
Рисунок 3 – Реостатный пуск двигателя с 3 ступенями
В начале запуска к цепи ротора подключаются все сопротивления, и по мере увеличения скорости они ступенчато выводятся.
Регулирование скорости вращения
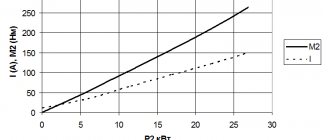
Частота вращения двигателя постоянного тока выражается формулой:
Это выражение так же называется электромеханической характеристикой ДПТ, в которой:
| U – питающее напряжение; |
| Iя – ток в якорной обмотке; |
| Rя – сопротивление якорной цепи; |
| k – конструктивный коэффициент двигателя; |
| Ф – магнитный поток двигателя. |
Формула момента двигателя:
Подставив в формулу электромеханической характеристики,получим:
Таким образом, исходя из приведенных формул, сделаем вывод, что скорость вращения ДПТ можно регулировать, изменяя сопротивление якоря, питающее напряжение и магнитный поток.
Конструкция и обслуживание двигателя постоянного тока
Основной обмоткой двигателя постоянного тока является якорь, подключающийся к источнику питания через щеточный аппарат. Якорь вращается в магнитном поле, создаваемом полюсами статора (обмотками возбуждения). Торцевые части статора закрыты щитами с подшипниками, в которых вращается вал якоря двигателя. С одной стороны на этом же валу установлен вентилятор охлаждения, прогоняющий поток воздуха через внутренние полости двигателя при его работе.
Схема двигателя постоянного тока
Щеточный аппарат – уязвимый элемент в конструкции двигателя. Щетки притираются к коллектору, чтобы как можно точнее повторять его форму, прижимаются к нему с постоянным усилием. В процессе работы щетки истираются, токопроводящая пыль от них оседает на неподвижных частях, ее периодически нужно удалять. Сами щетки нужно иногда перемещать в пазах, иначе они застревают в них под действием той же пыли и «зависают» над коллектором. Характеристики двигателя зависит еще и от положения щеток в пространстве в плоскости вращения якоря.
Со временем щетки изнашиваются и заменяются. Коллектор в местах контакта со щетками тоже истирается. Периодически якорь демонтируют и протачивают коллектор на токарном станке. После протачивания изоляция между ламелями коллектора срезается на некоторую глубину, так как она прочнее материала коллектора и при дальнейшей выработке будет разрушать щетки.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Такой тип двигателя обладает превосходными характеристиками, особенно при совершении управления посредством датчиков положения. Если момент сопротивления варьируется или вовсе неизвестен, а также при необходимости достижения более высокого пускового момента используется управление с датчиком. Если же датчик не используется (как правило, в вентиляторах), управление позволяет обойтись без проводной связи.
Особенности управления трёхфазным бесколлекторным двигателем без датчика по положению:
- расположение ротора определяют при помощи дифференциального АЦП (аналого-цифрового преобразователя);
- токовую перегрузку определяют также при помощи АЦП (аналого-цифрового преобразователя) либо аналогового компаратора;
- регулировку скорости выполняют при помощи подсоединённых к нижним драйверам ШИМ-каналов;
- рекомендуемыми микроконтроллерами считаются AT90PWM3 и ATmega64;
- поддерживаемыми коммуникационными интерфейсами (интерфейсами связи) являются УАПП, SPI и TWI.
Особенности управления трёхфазным бесколлекторным двигателем с датчиком по положению на примере датчика Холла:
- регулировку скорости выполняют при помощи подсоединённых к нижним драйверам ШИМ-каналов;
- выход каждого из датчиков Холла подключают к соответствующей линии ввода-вывода микроконтроллера, настроенной при изменениях состояния на генерацию прерываний;
- поддерживаемыми коммуникационными интерфейсами (интерфейсами связи) являются УАПП, SPI и TWI;
- токовую перегрузку определяют при помощи АЦП (аналого-цифрового преобразователя) либо аналогового компаратора.
Устройство электродвигателя
Основные элементы, из которых состоит типичный трехфазный двигатель таковы:
- Корпус, имеющий ножки, которыми он крепится к фундаменту;
- Статор, напоминающий по строению простой трансформатор. Имеет сердечник и обмотку При подаче тока создается вихревое электромагнитное поле.
- Ротор. Основная вращающаяся часть.
- Вал, на который жестко насажен ротор. Передняя часть выходит наружу, имеет шпоночную борозду под шестерни или шкив. На заднюю часть, выходящую за пределы корпуса насаживается крыльчатка для охлаждения и обдува.
- Подшипки, находящиеся в нишах передней и задней крышки.
- Герметичная клеммная коробка.
Классификация МПТ по способу питания обмоток индуктора и якоря
По данному признаку МПТ делятся на 4 вида.
С независимым возбуждением
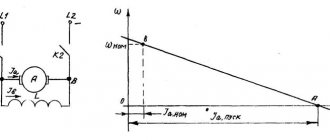
Обмотки индуктора и якоря не имеют электрического соединения. У генераторов этого типа обмотку возбуждения питает сеть постоянного тока, аккумулятор или специально предназначенный для этого генератор — возбудитель. Мощность последнего — несколько сотых мощности основного генератора.
Область применения генераторов с независимым возбуждением:
- системы значительной мощности, где напряжение на обмотке возбуждения существенно отличается от генерируемого;
- системы регулирования скорости вращения двигателей, запитанных от генераторов.
У двигателей с независимым возбуждением запитана и якорная обмотка. В основном это также агрегаты большой мощности.
Независимость обмотки индуктора позволяет удобнее и экономичнее регулировать ток возбуждения. Еще одна особенность таких моторов — постоянство магнитного потока возбуждения при любой нагрузке на валу.
С параллельным возбуждением
Обмотки индуктора и якоря соединены в одну цепь параллельно друг другу. Генераторы этого типа обычно применяются для средних мощностей. При параллельном соединении генерируемое устройством напряжение подается на обмотку возбуждения. При соединении в одну цепь обмоток индуктора и якоря говорят о генераторе с самовозбуждением.
По своим характеристикам они идентичны моторам с независимым возбуждением и обладают следующими особенностями:
- при изменении нагрузки частота вращения практически не трансформируется: замедление составляет не более 8% при переводе от холостого хода к номинальной нагрузке;
- можно с минимальными потерями регулировать частоту вращения, причем в широких пределах — 2-кратно, а у специально сконструированных моторов и 6-кратно.
Индуктор вращающегося двигателя с параллельным возбуждением нельзя отсоединять от цепи якоря, даже если он уже отключен. Это приведет к наведению значительной ЭДС в обмотке возбуждения с последующим выходом мотора из строя. Находящийся рядом персонал может получить травму.
С последовательным возбуждением
Обмотки соединены в цепь последовательно друг другу. Через обмотку возбуждения течет ток якоря. Генераторы этого типа почти не применяются, поскольку процесс самовозбуждения происходит достаточно бурно и устройство не способно обеспечить необходимое большинству потребителей постоянство напряжения. Их используют только в специальных установках.
Схема последовательного возбуждения
Двигатели этого типа широко применяют в качестве тяговых (электровозы, троллейбусы, краны и пр.): по сравнению с аналогами параллельного возбуждения, при нагрузке они дают более высокий момент с одновременным уменьшением скорости вращения. Пусковой момент также высок.
Запуск двигателя с нагрузкой ниже 25% номинальной, а тем более на холостом ходу, недопустим: частота вращения окажется чересчур высокой, и агрегат выйдет из строя.
С параллельно-последовательным (смешанным) возбуждением
Существует два вида схемы:
- основная обмотка индуктора включена параллельно с якорной, вспомогательная — последовательно;
- основная обмотка индуктора включена последовательно с якорной, вспомогательная — параллельно.
Схемы систем возбуждения МПТ
Подключение параллельной обмотки до последовательной называют «коротким шунтом», за последовательной — «длинным шунтом». Генераторы этого типа применяются крайне редко.
Двигатели сочетают в себе достоинства аналогов с параллельным и последовательным возбуждением: способны работать на холостом ходу и при этом развивают значительное тяговое усилие. Но и они сегодня почти не применяются.
Подключение двигателя постоянного тока к сети 220
Электродвигатели, работающие на постоянном токе, используются не так часто, как двигатели переменного тока. Ниже приведем их достоинства и недостатки.
| Достоинства | Недостатки |
| частота вращения легко регулируется | высокая стоимость |
| мягкий пуск и плавный разгон | сложность конструкции |
| получение частоты вращения выше 3000 об/мин | сложность в эксплуатации |
В быту двигатели постоянного тока нашли применение в детских игрушках, так как источниками для их питания служат батарейки. Используются они на транспорте: в метрополитене, трамваях и троллейбусах, автомобилях. На промышленных предприятиях электродвигатели постоянного тока применяются в приводах агрегатов, для бесперебойного электроснабжения которых используются аккумуляторные батареи.
Конструкция и обслуживание двигателя постоянного тока
Основной обмоткой двигателя постоянного тока является якорь, подключающийся к источнику питания через щеточный аппарат. Якорь вращается в магнитном поле, создаваемом полюсами статора (обмотками возбуждения). Торцевые части статора закрыты щитами с подшипниками, в которых вращается вал якоря двигателя. С одной стороны на этом же валу установлен вентилятор охлаждения, прогоняющий поток воздуха через внутренние полости двигателя при его работе.
Схема двигателя постоянного тока
Щеточный аппарат – уязвимый элемент в конструкции двигателя. Щетки притираются к коллектору, чтобы как можно точнее повторять его форму, прижимаются к нему с постоянным усилием. В процессе работы щетки истираются, токопроводящая пыль от них оседает на неподвижных частях, ее периодически нужно удалять. Сами щетки нужно иногда перемещать в пазах, иначе они застревают в них под действием той же пыли и «зависают» над коллектором. Характеристики двигателя зависит еще и от положения щеток в пространстве в плоскости вращения якоря.
Со временем щетки изнашиваются и заменяются. Коллектор в местах контакта со щетками тоже истирается. Периодически якорь демонтируют и протачивают коллектор на токарном станке. После протачивания изоляция между ламелями коллектора срезается на некоторую глубину, так как она прочнее материала коллектора и при дальнейшей выработке будет разрушать щетки.
Схемы включения двигателя постоянного тока
Наличие обмоток возбуждения – отличительная особенность машин постоянного тока. От способов их подключения к сети зависят электрические и механические свойства электродвигателя.
Обмотка возбуждения подключается к независимому источнику. Характеристики двигателя получаются такие же, как у двигателя с постоянными магнитами. Скорость вращения регулируется сопротивлением в цепи якоря. Регулируют ее и реостатом (регулировочным сопротивлением) в цепи обмотки возбуждения, но при чрезмерном уменьшении его величины или при обрыве ток якоря возрастает до опасных значений. Двигатели с независимым возбуждением нельзя запускать на холостом ходу или с малой нагрузкой на валу. Скорость вращения резко увеличится, и двигатель будет поврежден.
Схема независимого возбуждения
Остальные схемы называют схемами с самовозбуждением.
Обмотки ротора и возбуждения подключаются параллельно к одному источнику питания. При таком включении ток через обмотку возбуждения в несколько раз меньше, чем через ротор. Характеристики электродвигателей получаются жесткими, позволяющие использовать их для привода станков, вентиляторов.
Регулировка скорости вращения обеспечивается включением реостатов в цепь ротора или последовательно с обмоткой возбуждения.
Схема параллельного возбужденияПоследовательное возбуждение
Обмотка возбуждения включается последовательно с якорной, по ним течет один и тот же ток. Скорость такого двигателя зависит от его нагрузки, его нельзя включать на холостом ходу. Но он обладает хорошими пусковыми характеристиками, поэтому схема с последовательным возбуждением применяется на электрифицированном транспорте.
Схема последовательного возбужденияСмешанное возбуждение
При этой схеме используются две обмотки возбуждения, расположенные попарно на каждом из полюсов электродвигателя. Их можно подключить так, чтобы потоки их либо складывались, либо вычитались. В результате двигатель может иметь характеристики как у схемы последовательного или параллельного возбуждения.
Схема смешанного возбуждения
Для изменения направления вращения изменяют полярность одной из обмоток возбуждения. Для управления пуском электродвигателя и скоростью его вращения применяют ступенчатое переключение сопротивлений.
Оцените качество статьи. Нам важно ваше мнение:
Для того чтобы разобраться, как подключить электродвигатель конкретного типа, необходимо понимать принципы его работы и особенности конструкции. Существует множество электродвигателей разных типов. По способу подключения к сети переменного тока они бывают трехфазные, двухфазные или однофазные. По способу питания обмотки ротора делятся на синхронные и асинхронные.
Принцип действия электродвигателя демонстрирует простейший опыт, который всем нам показывали в школе — вращение рамки с током в поле постоянного магнита.
Рамка с током — это аналог ротора, неподвижный магнит — статор. Если в рамку подать ток, она повернется перпендикулярно направлению магнитного поля и застынет в этом положении. Если заставить магнит крутиться, рамка будет вращаться с той же скоростью, то есть синхронно с магнитом. У нас получился синхронный электродвигатель. Но у нас магнит — это статор, а он по определению неподвижен. Как заставить вращаться магнитное поле неподвижного статора?
Для начала заменим постоянный магнит катушкой с током. Это обмотка нашего статора. Как известно из той же школьной физики, катушка с током создает магнитное поле. Последнее пропорционально величине тока, а полярность зависит от направления тока в катушке. Если подать в катушку переменный ток, получим переменное поле.
Магнитное поле — векторная величина. Переменный ток в питающей сети имеет синусоидальную форму.
Нам поможет очень наглядная аналогия с часами. Какие векторы вращаются постоянно перед нашими глазами? Это часовые стрелки. Представим, что в углу комнаты висят часы. Секундная стрелка вращается, делая один полный оборот в минуту. Стрелка — вектор единичной длины.
Тень, которую стрелка отбрасывает на стену, меняется как синус с периодом в 1 минуту, а тень, отбрасываемая на пол — как косинус. Или синус, сдвинутый по фазе на 90 градусов. Но вектор равен сумме своих проекций. Другими словами, стрелка равна векторной сумме своих теней.
Двухфазный синхронный электродвигатель
Расположим на статоре две обмотки под углом в 90 градусов, то есть взаимно перпендикулярно. Подадим в них синусоидальный переменный ток. Фазы токов сдвинем на 90 градусов. Имеем два вектора взаимно перпендикулярных, меняющихся по синусоидальному закону со сдвигом фаз на 90 градусов. Суммарный вектор будет вращаться подобно часовой стрелке, делая один полный оборот за период частоты переменного тока.
У нас получился двухфазный синхронный электродвигатель. Откуда взять токи, сдвинутые по фазе для питания обмоток? Наверное, не всем известно, что вначале распределительные сети переменного тока были двухфазными. И лишь позднее, не без борьбы, уступили место трехфазным. Если бы не уступили, то наш двухфазный электромотор можно было подключить напрямую к двум фазам.
Но победили трехфазные сети, для которых были разработаны трехфазные электродвигатели. А двухфазные электромоторы нашли свое применение в однофазных сетях в виде конденсаторных двигателей.
Трехфазный синхронный двигатель
Современные распределительные сети переменного тока выполнены по трехфазной схеме.
- По сети передаются сразу три синусоиды со сдвигом фаз на треть периода или на 120 градусов относительно друг друга.
- Трехфазный двигатель отличается от двухфазного тем, что у него не две, а три обмотки на статоре, повернутых на 120 градусов.
- Три катушки, подключенные к трем фазам, создают в сумме вращающееся магнитное поле, которое поворачивает ротор.
Трехфазный асинхронный двигатель
Ток в ротор синхронного двигателя подается от источника питания. Но мы знаем из той же школьной физики, что ток в катушке можно создать переменным магнитным полем. Можно просто замкнуть концы катушки на роторе. Можно даже оставить всего один виток, как в рамке. А ток пусть индуцирует вращающееся магнитное поле статора.
- В момент старта ротор неподвижен, а поле статора вращается.
- Поле в контуре ротора меняется, наводя электрический ток.
- Ротор начнет догонять поле статора. Но никогда не догонит, так как в этом случае ток в нем перестанет наводиться.
- В асинхронном двигателе ротор всегда вращается медленнее магнитного поля.
- Разница скоростей называется скольжением. Подключение асинхронного двигателя не требует подачи тока в обмотку ротора.
У синхронных и асинхронных электродвигателей есть свои достоинства и недостатки, но факт состоит в том, что большинство двигателей, применяемых в промышленности на сегодняшний день — это асинхронные трехфазные двигатели.
Однофазный асинхронный электродвигатель
Если оставить на роторе короткозамкнутый виток, а на статоре одну катушку, то мы получим удивительную конструкцию — асинхронный однофазный двигатель.
На первый взгляд кажется, что такой двигатель работать не должен. Ведь в роторе нет тока, а магнитное поле статора не вращается. Но если ротор рукой толкнуть в любую сторону, двигатель заработает! И вращаться он будет в ту сторону, в которую его подтолкнули при пуске.
Объяснить работу этого двигателя можно, представив неподвижное переменное магнитное поле статора как сумму двух полей, вращающихся навстречу друг другу. Пока ротор неподвижен, эти поля уравновешивают друг друга, поэтому однофазный асинхронный двигатель не может стартовать самостоятельно. Если же ротор внешним усилием привести в движение, он будет вращаться попутно с одним вектором и навстречу другому.
Попутный вектор будет тянуть ротор за собой, встречный — тормозить.
Можно показать, что из-за разности встречной и попутной скоростей влияние попутного вектора будет сильнее, и двигатель будет работать в асинхронном режиме.
Возможно подключение нагрузок к трехфазной сети по двум схемам — звездой и треугольником. При подключении звездой начала обмоток соединяются между собой, а концы подключаются к фазам. При включении треугольником конец одной обмотки подключается к началу другой.
В схеме включения звездой обмотки оказываются под фазным напряжением 220 В., при включении треугольником — под линейным 380 В.
При включении треугольником двигатель развивает не только большую мощность, но и большие пусковые токи. Поэтому иногда используют комбинированную схему — старт звездой, затем переключение в треугольник.
Направление вращения определяется порядком подключения фаз. Для изменения направления достаточно поменять местами любые две фазы.
Подсоединение к однофазной сети
Трехфазный двигатель можно включать в однофазную сеть, хотя и с потерей мощности, если одну из обмоток подключить через фазосдвигающий конденсатор. Однако при таком включении двигатель сильно теряет в своих параметрах, поэтому этот режим использовать не рекомендуется.
Подключение на 220 вольт
В отличие от трехфазного, двухфазный мотор изначально предназначен для включения в однофазную сеть. Для получения сдвига фаз между обмотками включается рабочий конденсатор, поэтому двухфазные двигатели называют еще конденсаторными.
Емкость рабочего конденсатора рассчитывается по формулам для номинального рабочего режима. Но при отличии режима от номинального, например, при пуске баланс обмоток нарушается. Для обеспечения пускового режима на время старта и разгона параллельно рабочему подключается дополнительный пусковой конденсатор, который должен отключаться при выходе на номинальные обороты.
Как включить однофазный асинхронный двигатель
Если не нужен автоматический запуск, асинхронный однофазный двигатель имеет самую простую схему включения. Особенностью этого типа является невозможность автоматического старта.
Для автоматического пуска используется вторая пусковая обмотка как в двухфазном электромоторе. Пусковая обмотка подключается через пусковой конденсатор только для старта и после этого должна быть отключена вручную или автоматически.
Плюсы – минусы
Технические характеристики асихронных электродвигателей с короткозамкнутым ротором настолько превосходят показатели синхронных, что большинство приводов сделаны на их основе.
Плюсы таких устройств таковы:
- Надежность, простота конструкции, долговечность;
- Отсутствие сложностей в ремонте и обслуживании;
- Переключением 2-х фаз можно заставить вал вращаться в противоположную сторону;
- Применение в качестве генератора.
Недостатки или минусы также имеются:
- При неправильной фазировке, вал может вращаться в ненужную сторону и заклинить прочую механику (шестерни);
- Пусковой ток, превышающий номинальный до пяти раз;
- Скорость разгонки и торможения. На некоторые устройства с большой инерцией нужны движки большей мощности.
- При обрыве фазы, двигатель может сгореть если своевременно не отключить подачу напряжения.
Подключение к однофазным и трехфазным источникам питания
По типу питающей сети электродвигатели переменного тока классифицируют на одно- и трехфазные.
Подключение асинхронных однофазных двигателей осуществляет очень легко – для этого достаточно подвести к двум выходам на корпусе фазный и нулевой провод однофазной 220В сети. Синхронные двигатели тоже можно запитывать от сети данного типа, однако подключение немного сложнее – необходимо соединить обмотки ротора и статора так, чтобы их контакты однополюсного намагничивания были расположены напротив друг друга.
Подключение к трехфазной сети представляется несколько более сложным
В первую очередь, следует обратить внимание, что клеммная коробка содержит 6 выводов – по паре на каждую из трех обмоток. Во-вторых, это дает возможность использовать один из двух способов подключения («звезда» и «треугольник»)
Неправильное подключение может привести в поломке двигатель от расплавления обмоток статора.
Главное функциональное отличие «звезды» и «треугольника» заключается в различном потреблении мощности, что сделано для возможности включения машины в трехфазные сети с различным линейным напряжением — 380В или 660В. В первом случае следует соединять обмотки по схеме «треугольник», а во втором – «звездой». Такое правило включения позволяет в обоих случаях иметь напряжение 380В на обмотках каждой фазы.
На панели подключения выводы обмоток располагаются таким образом, чтобы перемычки, используемых для включения, не перекрещивались между собой. Если коробка выводов двигателя содержит только три зажима, значит, он рассчитан для работы от одного напряжения, которое указано в технической документации, а обмотки соединены между собой внутри устройства.
Схемы подключения однофазных асинхронных двигателей
С пусковой обмоткой
Для подключения двигателя с пусковой обмоткой потребуется кнопка, у которой один из контактов после включения размыкается. Эти размыкающиеся контакты надо будет подключить к пусковой обмотке. В магазинах есть такая кнопка — это ПНВС. У нее средний контакт замыкается на время удержания, а два крайних остаются в замкнутом состоянии.
Какое освещение Вы предпочитаете
ВстроенноеЛюстра
Сначала при помощи измерений определяем какая обмотка рабочая, какая — пусковая. Обычно вывод от мотора имеет три или четыре провода.
Рассмотрим вариант с тремя проводами. В этом случае две обмотки уже объединены, то есть один из проводов — общий. Берем тестер, измеряем сопротивление между всеми тремя парами. Рабочая имеет самое меньшее сопротивление, среднее значение — пусковая обмотка, а наибольшее — это общий выход (меряется сопротивление двух последовательно включенных обмоток).
Если выводов четыре, они звонятся попарно. Находите две пары. Та, в которой сопротивление меньше — рабочая, в которой больше — пусковая. После этого соединяем один провод от пусковой и рабочей обмотки, выводим общий провод. Итого остается три провода (как и в первом варианте):
С этими тремя проводами и работаем дальше — используем для подключения однофазного двигателя.
Конденсаторный
При подключении однофазного конденсаторного двигателя есть варианты: есть три схемы подключения и все с конденсаторами. Без них мотор гудит, но не запускается (если подключить его по схеме, описанной выше).
Схема с двумя конденсаторами
При реализации других схем — с одним конденсатором — понадобится обычная кнопка, автомат или тумблер. Там все соединяется просто.
Подбор конденсаторов
Есть довольно сложная формула, по которой можно высчитать требуемую емкость точно, но вполне можно обойтись рекомендациями, которые выведены на основании многих опытов:
Рабочее напряжение этих конденсаторов должно быть в 1,5 раза выше, чем напряжение сети, то есть, для сети 220 вольт берем емкости с рабочим напряжением 330 В и выше. А чтобы пуск проходил проще, для пусковой цепи ищите специальный конденсатор. У них в маркировке присутствует слова Start или Starting, но можно взять и обычные.
Изменение направления движения мотора
Если после подключения мотор работает, но вал крутится не в том направлении, которое вам надо, можно поменять это направление. Это делают поменяв обмотки вспомогательной обмотки. Когда собирали схему, один из проводов подали на кнопку, второй соединили с проводом от рабочей обмотки и вывели общий. Вот тут и надо перекинуть проводники.
Современное применение и перспективы
Существует немало устройств, для которых увеличение времени безотказной работы имеет важнейшее значение. В подобном оборудовании применение БДКП всегда оправданно, несмотря на их сравнительно высокую стоимость. Это могут быть водяные и топливные насосы, турбины охлаждения кондиционеров и двигателей и т. д. Бесщёточные моторы используются во многих моделях электрических транспортных средств
В настоящее время на бесколлекторные двигатели всерьёз обратила внимание автомобильная промышленность
БДКП идеально подходят для малых приводов, работающих в сложных условиях или с высокой точностью: питатели и ленточные конвейеры, промышленных роботы, системы позиционирования. Существуют сферы, в которых бесколлекторные двигатели доминируют безальтернативно: жёсткие диски, насосы, бесшумные вентиляторы, мелкая бытовая техника, CD/DVD приводы. Малый вес и высокая выходная мощность сделали БДКП также и основой для производства современных беспроводных ручных инструментов.
Принцип работы
Работа двигателя заключается в том, что контроллер коммутирует определённое количество обмоток статора таким образом, что вектор магнитных полей ротора и статора ортогональны. При помощи ШИМ (широтно-импульсной модуляции) контроллер совершает управление протекающим через двигатель током и регулирует момент, оказывающий воздействие на ротор. Направление этого действующего момента определяет отметка угла между векторами. При расчётах используются электрические градусы.
В такой ситуации результирующий вектор сдвигается и становится неподвижным по отношению к потоку ротора, что, в свою очередь, создаёт необходимый момент на валу электродвигателя.
Классификация
Все трехфазные электродвигатели можно разбить на две группы:
Синхронные. Вращаются со скоростью постоянного магнитного поля. Для повышения мощности, ротор изготовляется по принципу трансформатора – имеет обмотки и сердечник. Напряжение подается через угольные щетки на кольца коллектора (контакты), закрепленного на валу, а уж потом – на катушки ротора.
Асинхронные, с короткозамкнутым ротором. Вращательный импульс идет от возбуждения катушек статора. Короткозамкнутые витки выполнены в виде беличьего колеса. Ротор вращается со скоростью ниже, чем электромагнитное поле статора. Отсюда и его название.
Принцип преобразования энергии
Принцип работы электродвигателя любого типа заключается в использовании электромагнитной индукции, возникающей внутри устройства после подключения в сеть. Для того чтобы понять, как эта индукция создается и приводит элементы двигателя в движение, следует обратиться к школьному курсу физики, объясняющему поведение проводников в электромагнитном поле.
Итак, если мы погрузим проводник в виде обмотки, по которому движутся электрические заряды, в магнитное поле, он начнет вращаться вокруг своей оси. Это связано с тем, что заряды находятся под влиянием механической силы, изменяющей их положение на перпендикулярной магнитным силовым линиям плоскости. Можно сказать, что эта же сила действует на весь проводник.
Схема, представленная ниже, показывает токопроводящую рамку, находящуюся под напряжением, и два магнитных полюса, придающие ей вращательное движение.
Картинка кликабельна.
Именно эта закономерность взаимодействия магнитного поля и токопроводящего контура с созданием электродвижущей силы лежит в основе функционирования электродвигателей всех типов. Для создания аналогичных условий в конструкцию устройства включают:
- Ротор (обмотка) – подвижная часть машины, закрепленная на сердечнике и подшипниках вращения. Она исполняет роль токопроводящего вращательного контура.
- Статор – неподвижный элемент, создающий магнитное поле, воздействующее на электрические заряды ротора.
- Корпус статора. Оснащен посадочными гнездами с обоймами для подшипников ротора. Ротор размещается внутри статора.
Для представления конструкции электродвигателя можно создать принципиальную схему на основе предыдущей иллюстрации:
После включения данного устройства в сеть, по обмоткам ротора начинает идти ток, который под воздействием магнитного поля, возникающего на статоре, придает ротору вращение, передаваемое на крутящийся вал. Скорость вращения, мощность и другие рабочие показатели зависят от конструкции конкретного двигателя и параметров электрической сети.
Принцип работы двигателя постоянного тока
Функционирование всех современных электромоторов базируется на принципах электромагнитной индукции и так называемом «правиле правой руки», когда ротор начинает вращаться при пропускании разнонаправленного тока вверху и внизу роторной обмотки. Согласно данному правилу, уложенные в якорные пазы проводники выталкиваются из генерируемого статором магнитного поля, тем самым придавая ускорение ротору эл двигателя.
Получается, что верхняя часть обмотки ротора начинает выталкиваться в левую сторону, а нижняя часть – в правую. Эта энергия передается непосредственно валу электромотора, вокруг которого закреплена обмотка, и тот совершает вращательное движение. Однако вращение прекращается, когда ротор проворачивается, и якорные части меняются местами. Для поддержки оборотов в электрическом двигателе постоянного тока П используется коллектор, с помощью которого производится коммутация роторной обмотки.
Теперь рассмотрим наиболее распространенные способы подключения двигателя постоянного тока. Обратите внимание, что оптимальная схема подключения к сети или аккумулятору должна соответствовать мощности силового агрегата. Различают устройства малой, средней и большой мощности.
Виды двигателей и их устройство
Электрические двигатели переменного тока имеют различное устройство, благодаря которому можно создавать машины с одинаковой частотой вращения ротора относительно магнитного поля статора, и такие машины, где ротор «отстает» от вращающегося поля. По данному принципу эти двигатели разделяют на соответствующие типы: синхронные и асинхронные.
Асинхронные
Основу конструкции асинхронного электродвигателя составляет пара важнейших функциональных частей:
- Статор – блок цилиндрической формы, сделанный из листов стали с пазанми для укладки токопроводящих обмоток, оси которых располагаются под углом 120˚ относительно друг друга. Полюса обмоток уходят на клеммную коробку, где подключаются разными способами, в зависимости от необходимых параметров работы электродвигателя.
- Ротор. В конструкции асинхронных электродвигателей используются роторы двух видов:
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец. Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».
- Фазный. На роторах данного типа устанавливается трехфазная обмотка, похожая на обмотку статора. Чаще всего концы её проводников идут в клеммную площадку, где соединяются «звездой», а свободные концы подключаются к контактным кольцам. Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
Помимо описанных ключевых элементов асинхронного электродвигателя, в его конструкцию также входит вентилятор для охлаждения обмоток, клеммная коробка и вал, передающий генерируемое вращение на рабочие механизмы оборудования, работа которого обеспечивается данным двигателем.
Работа асинхронных электрических двигателей основывается на законе электромагнитной индукции, утверждающем, что электродвижущая сила может возникнуть лишь в условиях разности скоростей вращения ротора и магнитного поля статора. Таким образом, если бы эти скорости были равны, ЭДС не могла бы появиться, но воздействие на вал таких «тормозящих» факторов, как нагрузка и трение подшипников, всегда создает достаточные для работы условия.
Синхронные
Конструкция синхронных электродвигателей переменного тока несколько отлична от устройства асинхронных аналогов. В этих машинах ротор крутится вокруг своей оси со скоростью, равной скорости вращения магнитного поля статора. Ротор или якорь этих устройств тоже оснащается обмотками, которые одними концами подключены друг к другу, а другими – к вращающемуся коллектору. Контактные площадки на коллекторе смонтированы так, что в определенный момент времени возможна подача питания через графитовые щетки лишь на два противоположных контакта.
Принцип работы синхронных электродвигателей:
- При взаимодействии магнитного потока в обмотке статора с током ротора возникает вращающий момент.
- Направление движения магнитного потока изменяется одновременно с направлением переменного тока, благодаря чему сохраняется вращение выходного вала в одну сторону.
- Настройка нужной частоты вращения осуществляется регулировкой входящего напряжения. Чаще всего, в быстроходном оборудовании, например, перфораторах и пылесосах, эту функцию выполняет реостат.
Чаще всего причинами выхода синхронных электродвигателей из строя является:
- износ графитовых щеток или ослабление прижимной пружины;
- износ подшипников вала;
- загрязнение коллектора (чистится наждачной бумагой или спиртом).
Трехфазный генератор переменного тока
Устройство и принцип работы
В современных ДПТ используется все тот же принцип взаимодействия заряженного проводника с магнитным полем. С усовершенствованием технологий устройство лишь дополняется некоторыми элементами, улучшающими производительность. К примеру, в наши дни постоянные магниты используются лишь в двигателях низкой мощности, поскольку в крупных аппаратах они занимали бы слишком много места.
Основной принцип
Первоначальные прототипы двигателей данного типа были заметно проще современных аппаратов. Их примитивное устройство включало в себя лишь статор из двух магнитов и якорь с обмотками, на которые подавался ток. Изучив принцип взаимодействия магнитных полей, конструкторы определили следующий алгоритм работы двигателя:
- Подача питания создает на обмотках якоря электромагнитное поле.
- Полюса электромагнитного поля отталкиваются от одноименных полюсов поля постоянного магнита.
- Якорь вместе с валом, на котором он закреплен, вращается в соответствии с отталкивающимся полем обмотки.
Данный алгоритм отлично работал в теории, однако на практике перед создателями первых двигателей вставали характерные проблемы, препятствовавшие функционированию машины:
- Мертвое положение, из которого двигатель невозможно запустить – когда полюса точно сориентированы друг перед другом.
- Невозможность пуска из-за сильного сопротивления или слабого отталкивания полюсов.
- Ротор останавливается после совершения одного оборота. Это связано с тем, что после прохождения половины окружности притягивание магнита не разгоняло, а тормозило вращение ротора.
Решение первой проблемы было найдено довольно быстро – для этого было предложено использовать более двух магнитов. Позднее в устройство двигателя стали включать несколько обмоток и коллекторно-щеточный узел, который подавал питание только на одну пару обмоток в определенный момент времени.
Коллекторно-щеточная система подачи тока решает и проблему торможения ротора – переключение полярности происходит до того момента, когда вращение ротора начинает замедляться. Это значит, что во время одного оборота двигателя происходит как минимум два переключения полярности.
Проблема слабых пусковых токов рассматривается ниже в отдельном разделе.
Конструкция
Итак, постоянный магнит закрепляется на корпусе двигателя, образуя вместе с ним статор, внутри которого располагается ротор. После подачи питания на обмотке якоря возникает электромагнитное поле, вступающее во взаимодействие с магнитным полем статора, это приводит к вращению ротора, жестко посаженного на вал. Для передачи электрического тока от источника к якорю двигатель оснащается коллекторно-щеточным узлом, состоящим из:
- Коллектора. Он представляет собой токосъемное кольцо из нескольких секций, разделенных диэлектрическим материалом, подключается к обмоткам якоря и крепится непосредственно на валу двигателя.
- Графитовых щеток. Они замыкают цепь между коллектором и источником питания с помощью щеток, которые прижимаются к контактным площадкам коллектора прижимными пружинами.
Обмотки якоря одними концами соединяются между собой, а другими – с секциями коллектора, образуя таким образом цепь, по которой ток идет по следующему маршруту: входная щетка –> обмотка ротора -> выходная щетка.
Приведенная принципиальная схема (рис. 3) демонстрирует принцип работы примитивного электродвигателя постоянного тока с коллектором из двух секций:
- В этом примере мы будет считать стартовым положением ротора то, которое нарисовано на схеме. Итак, после подачи питания на нижнюю щетку, помеченную знаком «+», ток протекает по обмотке и создает вокруг нее электромагнитное поле.
- По правилу буравчика в левой нижней части формируется северный полюс якоря, а на правой верхней – южный. Располагаясь вблизи одноименных полюсов статора, они начинают отталкиваться, приводя тем самым ротор в движение, которое продолжается до тех пор, пока противоположные полюса не окажутся на минимальном друг от друга расстоянии, то есть придут в окончательное положение (рис. 1).
- Конструкция коллектора на данном этапе приведет к переключению полярности на обмотках якоря. В результате этого полюса магнитных полей снова окажутся на близком расстоянии и начнут отталкиваться.
- Ротор совершает полный оборот, и коллектор снова меняет полярность, продолжая его движение.
Детали электродвигателя постоянного тока
Здесь, как уже было отмечено, продемонстрирован принцип работы примитивного прототипа. В настоящих двигателях используется более двух магнитов, а коллектор состоит из большего числа контактных площадок, благодаря чему обеспечивается плавное вращение.
В высокомощных двигателях использование постоянных магнитов не представляется возможным из-за их большого размера. Альтернативой для них служит система из нескольких токопроводящих стержней, на каждой из которых имеется своя обмотка, подключаемая к питающим шинам. Одноименные полюса включаются в сеть последовательно. На корпусе может присутствовать от 1 до 4 пар полюсов, а их количеству должно соответствовать число токосъемных щеток на коллекторе.
Электродвигатели, рассчитанные на большую мощность, обладают рядом функциональных преимуществ перед более «легкими» аналогами. К примеру, здешнее устройство токосъемных щеток поворачивает их на определенный угол относительно вала для компенсации торможения вала, названного «реакцией якоря».
Бесколлекторный электродвигатель постоянного тока. Общие сведения и устройство прибора
Контроллеры электродвигателей такого типа зачастую питаются благодаря постоянному напряжению, отчего и получили своё название. В англоязычной технической литературе вентильный электродвигатель называют PMSM или BLDC.
Бесколлекторный электродвигатель был создан в первую очередь для оптимизации любого электродвигателя постоянного тока в целом. К исполнительному механизму такого устройства (особенно к высокооборотному микроприводу с точным позиционированием) ставились очень высокие требования.
Это, пожалуй, и обусловило использование таких специфических приборов постоянного тока, бесколлекторные трёхфазные двигатели, также называемые БДПТ. По своей конструкции они практически идентичны синхронным двигателям переменного тока, где вращение магнитного ротора происходит в обычном шихтованном статоре при наличии трёхфазных обмоток, а количество оборотов зависит напряжения и нагрузок статора. Исходя из определённых координат ротора, происходит переключение разных обмоток статора.
обмотки статора выполняют функцию фиксирующего элемента
Если одна из обмоток будет выключена, то будет измеряться и в дальнейшем обрабатываться тот сигнал, который был наведён, однако, такой принцип работы невозможен без профессора обработки сигналов. А вот для реверса или торможения такого электродвигателя мостовая схема не нужна – достаточно будет подачи в обратной последовательности управляющих импульсов на обмотки статора.
В ВД (вентильном двигателе) индуктор в виде постоянного магнита расположен на роторе, а якорная обмотка – на статоре. Исходя из положения ротора, формируется напряжение питания всех обмоток электродвигателя. При использовании в таких конструкциях коллектора, его функцию будет выполнять в вентильном двигателе полупроводниковый коммутатор.
Основное отличие синхронного и вентильного двигателей заключается в самосинхронизации последнего при помощи ДПР, что обусловливает пропорциональную частоту вращения ротора и поля.
Чаще всего бесколлекторный электродвигатель постоянного тока находит применение в следующих сферах:
- морозильное или холодильное оборудование (компрессоры);
- электропривод;
- системы нагрева воздуха, его кондиционирования или вентиляции.
Статор
Это устройство имеет классическую конструкцию и напоминает такой же прибор асинхронной машины. В состав входит сердечник из медной обмотки (уложенной по периметру в пазы), определяющей количество фаз, и корпус. Обычно синусной и косинусной фаз достаточно для вращения и самозапуска, однако, часто вентильный двигатель создают трёхфазным и даже четырёхфазным.
Электродвигатели с обратной электродвижущей силой по типу укладки витков на обмотке статора делятся на два типа:
- синусоидальной формы;
- трапецеидальной формы.
В соответствующих видах двигателя электрический фазный ток меняется также по способу питания синусоидально или трапецеидально.
Ротор
Самыми распространёнными и дешёвыми для изготовления ротора считаются ферритовые магниты, но их недостатком является низкий уровень магнитной индукции, поэтому на замену такому материалу сейчас приходят приборы, созданные из сплавов различных редкоземельных элементов, поскольку могут предоставить высокий уровень магнитной индукции, что, в свою очередь, позволяет уменьшить размер ротора.
ДПР
Датчик положения ротора обеспечивает обратную связь. По принципу работы устройство делится на такие подвиды:
- индуктивный;
- фотоэлектрический;
- датчик с эффектом Холла.
Последний тип получил наибольшую популярность благодаря своим практически абсолютным безынерционным свойствам и способности избавляться по положению ротора от запаздывания в каналах обратной связи.
Система управления
Система управления состоит из силовых ключей, иногда также из тиристоров или силовых транзисторов, включающих изолированный затвор, ведущих к сбору инвертора тока либо инвертора напряжения. Процесс управления этими ключами реализуется чаще всего путём использования микроконтроллера, требующего для управления двигателем огромного количества вычислительных операций.
Включение через пусковой реостат
Такая схема подключения предусматривает наличие в пусковой цепи электромотора дополнительного устройства, создающего переменное сопротивление. Есть несколько способов, как подключить его и какое именно устройство использовать. Но цель здесь одна – обеспечить снижение токовой нагрузки на старте до достижения валом оптимальной скорости вращения. В процессе стабилизации силы тока сопротивление реостата должно меняться от максимума до минимума. Расчет производится по формуле: І=U/R+R(реостата).
Многим наверняка известны еще со школьных занятий по физике подобные опыты, когда сопротивление менялось вручную путем перемещения ползунка реостата. Однако на производстве такой способ малоэффективен и плохо согласовывается с токовыми величинами, поэтому применяется редко. Чаще используется вариант подключения с регулировкой по току или по электродвижущей силе в обмотках возбуждения. Также распространен монтаж к реле времени, где независимое управление отдельными ступенями осуществляется посредством временной выдержки.
Отличительной особенностью силовых агрегатов переменного тока (в отличие от рассчитанных на переменку 3ф или напряжение тока 220 вольт) – это наличие обмоток возбуждения. Перечисленные выше способы подключения применимы для электромоторов всех типов возбуждения:
- независимого;
- параллельного;
- последовательного;
- смешанного.
Но здесь есть некоторые нюансы. Моторы независимого возбуждения нельзя запускать на холостом ходу или при малых нагрузках, иначе агрегат будет поврежден от резко возросшей скорости вращения. При параллельном подсоединении через обмотку возбуждения проходит намного меньший ток, чем через роторную часть, поэтому мотор имеет жесткие характеристики, полезные для станков или вентиляторов. Если соединить ротор и обмотку возбуждения последовательно, то по ним будет протекать ток одинаковой величины. Такой силовой агрегат, распространенный в современном электротранспорте, имеет хорошие пусковые свойства, но тоже боится запуска на холостом ходу.
Условные обозначения двигателей постоянного тока серии П.
П Х1 Х2 Х3 М П – машина постоянного тока; Х1 – исполнение по степени защиты и способу охлаждения. Без буквы – брызгозащищенный с самовентиляцией 1-6 габарит. Б – закрытое исполнение с естественным охлаждением 1-4 габарит; Х2 – габарит электрической машины. 1-1 габарит, 2-2 габарит, 3-3 габарит, 4-4 габарит, 5-5 габарит, 6-6 габарит; Х3 – условная длина сердечника якоря. 1 – первая длина, 2 – вторая длина; М – морское исполнение;
По способу монтажа электродвигатели постоянного тока имеют конструктивное исполнение — IM1001, IM2101, IM2111, IM2131, IM3601, IM3631, IM3611. Двигатели постоянного тока могут быть изготовлены с присоединенным тахогенератором.
Условия эксплуатации электродвигателей постоянного тока П51, П52.
- Двигатели постоянного тока П51, П52 выпускаются для работы при температуре окружающей среды от -40°С до +40°С.
- При температуре окружающей среды 20° ± 5°С % относительная влажность 95°±3°С%.
- Выдерживают — вибрацию, ударные сотрясения, долговременные наклоны оси электродвигателя постоянного тока от 45° в любую сторону и при качке до 45° с периодом качки 7-9 с.
Возбуждение двигателя постоянного тока последовательное, параллельное, смешанное, независимое. Класс нагревостойкости изоляция электродвигателя постоянного тока — Н. Общий уровень вибрации электродвигателей и уровня интенсивности воздушного шума соответствуют всем принятым нормам.
Габаритные и присоединительные размеры двигателей постоянного тока П51, П52, ПБ51, ПБ52
| Тип двигателей постоянного тока | Размеры, мм | Масса, кг при IM2101, IM2102, IM3601, IM2103, IM2104, IM3611, IM3631 | Масса, кг при IM1001, IM1004 | ||||||
| b10 | d1 | d20 | d30 | l10 | l30 | h | |||
| П51У4 | 264 | 35 | 255 | 352 | 225 | 606 | 180 | 122 | 115 |
| ПБ51У2 | 638 | 127 | 120 | ||||||
| П52У4 | 264 | 35 | 255 | 352 | 265 | 646 | 180 | 142 | 135 |
| ПБ52У2 | 678 | 147 | 140 |
Основные технические характеристики двигателей постоянного тока П51, П52
| Тип | Мощность, кВт | Напряжение В | Ток сети А | Частота вращения, об/мин | КПД % |
| П51М | 2,7 | 110 | 33 | 750/1500 | 71 |
| 2,7 | 220 | 17,2 | 750/1500 | 74 | |
| 4,2 | 110 | 52,2 | 1000/2000 | 73 | |
| 4,2 | 220 | 25,6 | 1000/2000 | 74,5 | |
| 7,4 | 110 | 83,6 | 1500/2250 | 79,5 | |
| 7,4 | 220 | 41,8 | 1500/2250 | 80 | |
| 14,5 | 110 | 153 | 3000/3300 | 85 | |
| 14,5 | 220 | 77,3 | 3000/3300 | 85 | |
| П52М | 3,4 | 220 | 20,8 | 750/1500 | 74,5 |
| 5 | 110 | 58,5 | 1000/2000 | 77 | |
| 5 | 220 | 29,2 | 1000/2000 | 77 | |
| 8,8 | 110 | 97,8 | 1500/2250 | 81,5 | |
| 8,8 | 220 | 48 | 1500/2250 | 82,5 | |
| 16 | 220 | 84,5 | 2800 | 86 | |
| 20 | 220 | 104 | 3000/3300 | 87 |
Электродвигатели постоянного тока серии П 1, 2, 3, 4 габаритовЭлектродвигатели постоянного тока серии П51, П52Электродвигатели постоянного тока серии П61, П62Двигатели постоянного тока серии 2П (2ПО132 — 2ПО200, 2ПФ132 — 2ПФ200)Электродвигатели постоянного тока 2ПН, 2ПБЭлектрические машины постоянного тока серии 4ПДвигатели постоянного тока ДП-112, ДК-112, ДКУ-112Двигатели МР на постоянных магнитах
Двигатели МТА на постоянных магнитахДвигатели PI, PC, 3PI на постоянных магнитахДвигатели MX, МВН, МВО на постоянных магнитахЭлектродвигатели постоянного тока серии ДЭлектродвигатели постоянного тока ДПМЭлектродвигатели постоянного тока ДПУРЭлектродвигатели постоянного тока ПБС, ПБСТЭлектродвигатели постоянного тока ДК-309М
Схемы подключения
Подключение ДПТ выполняется несколько сложнее, в сравнении с двигателями со спецификацией на переменный ток.
У двигателей высокой и средней мощности, как правило, есть специальные контакты обмотки возбуждения (ОВ) и якоря, вынесенные в клеммную коробку. Чаще всего на якорь подают выходное напряжение источника, а на ОВ – ток, отрегулированный, как правило, реостатом. Скорость вращения двигателя напрямую зависит от силы тока, поданного на обмотку возбуждения.
Есть три основные схемы включения якоря и обмотки возбуждения электродвигателей постоянного тока:
- Последовательное возбуждение используется в моторах, от которых требуется большая сила тока на старте (электрический транспорт, прокатное оборудование и т.п.). Данная схема предусматривает последовательное подключение ОВ и якоря к источнику. После подачи напряжения по обмоткам якоря и ОВ проходят токи одинаковой величины.Следует учитывать, что снижение нагрузки на вал даже на четверть при последовательном возбуждении приведет к резкому повышению оборотов, что может привести к поломке двигателя, поэтому эта схема и используется в условиях постоянной нагрузки.
- Параллельное возбуждение применяется в моторах, обеспечивающих работу станкового, вентиляторного и прочего оборудования, которое в момент пуска не оказывает высокую нагрузку на вал. В этой схеме для возбуждения ОВ используется независимая обмотка, регулируемая, чаще всего, реостатом.
- Независимое возбуждение очень схоже с параллельным, но в данном случае для подачи питания ОВ используется независимый источник, что исключает появление электрической связи между якорем и обмоткой возбуждения.
В современных электрических двигателях постоянного тока могут применяться смешанные схемы, основанные на базе трех описанных.
Регулировка скорости вращения
Способ регулирования оборотов ДПТ зависит от схемы его подключения:
- В моторах с параллельным возбуждением снижение оборотов относительно номинала можно производить изменяя напряжение якоря, а повышение – ослабляя поток возбуждения. Для увеличения оборотов (не более чем в 4 раза относительно номинальной величины) в цепь ОВ добавляется реостат.
- При последовательном возбуждении регулировка легко осуществляется переменным сопротивлением в цепи якоря. Правда этот метод подходит только для снижения оборотов и лишь в соотношениях 1:3 или 1:2 (кроме того, это приводит к большим потерям в реостате). Повышение осуществляется с помощью регулировочного реостата в цепи ОВ.
Данные схемы редко применяются в современном высокотехнологичном оборудовании, поскольку обладают узким диапазоном регулировки и другими недостатками. В наши дни для этих целей все чаще создают электронные схемы управления.
Реверсирование
Для того чтобы реверсировать (обратить) вращение двигателя постоянного тока необходимо:
- при последовательном возбуждении – просто изменить полярность входных контактов;
- при смешанном и параллельном возбуждении – необходимо менять направление тока в обмотке якоря; разрыв ОВ может привести к критическому повышению нагнетаемой электродвижущей силы и пробою изоляции проводов.