§5.6. Двигатели постоянного тока. Основные характеристики
В цепь якоря может быть включено добавочное сопротивление Rд, например пусковой реостат. Для регулирования тока возбуждения в цепь обмотки возбуждения может быть включен регулировочный реостат Rр. У двигателя параллельного возбуждения обмотки якоря и возбуждения подключены к одному источнику питания, и напряжение на них одинаковое. Следовательно, двигатель параллельного возбуждения можно рассматривать как двигатель независимого возбуждения при Uя= Uв.
Механические характеристики. Механические характеристики двигателей принято подразделять на естественные и искусственные. Естественная характеристика соответствует номинальному напряжению питания и отсутствию добавочных сопротивлений в цепях обмоток двигателя. Если хотя бы одно из перечисленных условий не выполняется, характеристика называется искусственной. Уравнения электромеханической ω=f(I я) и механической ω=f(M эм.) характеристик могут быть найдены из уравнения равновесия ЭДС и напряжений для якорной цепи двигателя, записанного на основании второго закона Кирхгофа:
U я=E я+I я)(R я+R д), (5.35)
где R я – активное сопротивление якоря. Преобразуя (5.35) с учетом (5.6), получим уравнение электромеханической характеристики
ω=(U я-I я(R я+R д))/kФ. (5.36)
В соответствии с (5.10) ток якоря I я=M эм./kФ и выражение (5.36) преобразуется в уравнение механической характеристики:
ω=Uя/ kФ – ( R я+ R д)/( kФ) 2)Mэм. . (5.37)
Это уравнение можно представить в виде ω= ω о.ид.- Δ ω, где
ω о.ид.=Uя/kФ (5.38)
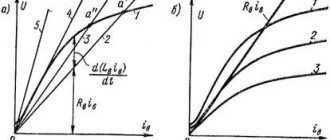
ω о.ид — угловая скорость идеального холостого хода ( при Iя=0 и, соответственно, Мэм.=0 ); Δ ω= Мэм. [(Rя+Rд)/(kФ)2]– уменьшение угловой скорости, обусловленное нагрузкой на валу двигателя и пропорциональное сопротивлению якорной цепи. Семейство механических характеристик при номинальном напряжении на якоре и потоке возбуждения и различных добавочных сопротивлениях в цепи якоря изображено на .
Механические характеристики двигателей принято оценивать по трем показателям: устойчивости, жесткости и линейности. Естественная механическая характеристика, соответствующая (5.37) при Rд=0, изображена прямой линией 1. Механическая характеристика линейная; отклонение от линейного закона может быть вызвано реакцией якоря, приводящей к изменению потока Ф. Эта характеристика жесткая, так как при изменении момента нагрузки и соответственно скорости поток возбуждения не изменяется. Жесткость характеристики уменьшается при введении добавочного сопротивления в цепь якоря (прямые линии 2 и 3 – искусственные реостатные характеристики). Характеристики устойчивые, так как dω/dMэм.
Iя= (Uя-Eя)/(R я+ R д)=(Uя -kωФ;)/( R я R д ), (5.39)
возрастает. Соответственно растет электромагнитный момент вплоть до нового значения момента сопротивления (переход из точки А в точку В на механической характеристике). По аналогии на основании (5.37) может быть построено семейство искусственных характеристик при различных значениях Uя или Ф. Анализ таких характеристик будет проделан в разделе исполнительных двигателей постоянного тока (§ 5.7).
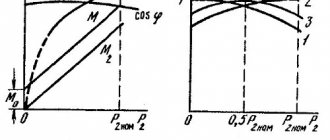
Рабочие характеристики. Рабочие характеристики двигателя – это зависимости угловой скорости ω, электромагнитного Мэм. и полезного М2 моментов и кпд η от полезной механической мощности на валу двигателя P2=M2ω при номинальном напряжении питания и отсутствии добавочных сопротивлений (). Однако у рассматриваемых двигателей рабочие характеристики построены не в функции полезной мощности двигателя P2, а в функции тока якоря Iя. Объясняется это тем, что в двигателях постоянного тока электрическая мощность, идущая на преобразование в механическую, поступает через цепь якоря. Ток якоря двигателей независимого и параллельного возбуждения, у которых скорость слабо зависит от нагрузки, практически прямо пропорционален мощности P2. Уравнения же рабочих характеристик через ток Iя получить гораздо проще. Характеристики ω= f(Iя) и Mэм.=а(Iя) могут быть построены соответственно на основании уравнений (5.36) и (5.10). Без учета реакции якоря эти характеристики линейные, у реальных машин под действием реакции якоря (изменение Ф) характеристики могут оказаться нелинейными. Полезная составляющая момента двигателя M2 меньше электромагнитного момента на значение момента холостого хода M0=(ΔPмех.+ΔPм)/ ω, где ΔPмех. – механические потери мощности (трение); Δ Pм – магнитные потери. Характеристики полезного момента M2 и КПД η начинаются из точки реального холостого хода, которому соответствует ток якоря Iяо (рис. 5.20,б). Кривая КПД имеет типичный для всех электрических машин характер, т.к. в двигателе имеются постоянные потери (ΔPмех.+ΔPм+UвIв), практически не зависящие от нагрузки (тока якоря), и переменные потери в якоре I 2я Rя .
Регулирование скорости. Угловую скорость двигателя при неизменном моменте сопротивления можно регулировать (см. (5.37)) тремя способами: 1)якорным – изменением напряжения на обмотке якоря Uя; 2)полюсным – изменением магнитного потока возбуждения Фв; 3)реостатным – изменением добавочного сопротивления Rд в цепи якоря. Регулировочные характеристики двигателей независимого возбуждения при якорном и полюсном способах управления будут подробно рассмотрены в разделе исполнительных двигателей (см. §5.7 ). При реостатном способе через реостаты Rд (см. ) должен длительно пропускаться значительный ток, что вызывает большие потери мощности, поэтому данный способ неэкономичен и применяется редко.
Пуск. В соответствии с уравнением равновесия моментов (2.29) условием пуска двигателя является неравенство Мп >Мст. Если это условие выполняется, то при включении двигателя в сеть ротор приходит в движение и разгоняется до установившегося режима. Ввиду того, что ротор обладает моментом инерции, разгоняется он не мгновенно – нарастание скорости происходит по закону, близкому к экспоненте. Пуск двигателя постоянного тока осложняется тем, что при ω=0 ЭДС Eя=0 и пусковой ток якоря Iяп= Uя/ Rя может в 10 – 20 раз превышать номинальный ток, что опасно как для двигателя (усиление искрения, динамические перегрузки), так и для источника питания. Поэтому важнейшими показателями пускового режима являются кратность пускового тока Kiп= Iп/ Iном и кратность пускового момента Кмп= Мп/ Мном. При пуске необходимо обеспечить требуемую кратность пускового момента при возможно меньшей кратности пускового тока. Прямой пуск применяют обычно при кратности пускового тока K iп?6. При большем значении Kiп применяют способы пуска, обеспечивающие снижение тока Iяп либо за счет подачи пониженного напряжения на обмотку якоря, либо за счет введения добавочного сопротивления в цепь якоря. Первый способ применяется в основном при работе двигателей в системах автоматического регулирования с якорным способом управления. Второй способ, называемый реостатным, распространен наиболее широко в нерегулируемом приводе. Сопротивление пускового реостата Rп= Rд (см. рис. 5.19) выбирают таким, чтобы ограничить Iяп до (1,4 – 1,8) Iя.ном у двигателей средней мощности и до (2,0 – 2,5) Iя.ном у двигателей малой мощности. По мере разгона якоря ток якоря уменьшается и пусковой реостат постепенно выводится.
Реверсирование. Реверсирование двигателя осуществляется либо изменением полярности напряжения на обмотке якоря, либо на обмотке возбуждения. В обоих случаях изменяется знак электромагнитного момента двигателя Мэм и соответственно направление вращения ротора.
Торможение. У двигателей независимого и параллельного возбуждения возможны три тормозных режима: рекуперативное торможение, торможение противовключением и динамическое. При анализе тормозных режимов необходимо строить механические характеристики машины во всех четырех квадрантах плоскости Мэм, ω. Для построения механических характеристик можно пользоваться одним и тем же уравнением (5.37) с учетом знака Мэм в различных режимах работы машины. Рекуперативное торможение, или генераторное торможение с отдачей энергии в сеть, может быть осуществлено при ω>ω о.ид. В этом случае ЭДС якоря Eя > Uя (см. (5.6) и (5.38)), ток якоря меняет направление, машина переходит в генераторный режим и электромагнитный момент становится тормозным. Механической характеристикой в режиме рекуперативного торможения является продолжение механической характеристики двигателя во II квадранте (ω>0, Mэм(рис. 5.21,а, Uя2я1).
В момент уменьшения напряжения питания двигатель переходит из точки А характеристики 1 в точку В характеристики 2, момент Мэм меняет знак и начинается торможение двигателя до точки С. Торможение до остановки таким способом невозможно и он используется, в основном, при торможении на высоких скоростях. Способ экономичен благодаря возможности отдачи электрической энергии в сеть. Торможение противовключением может происходить в двух случаях: 1)если внешний момент, больший чем пусковой момент двигателя, заставляет вращаться якорь против его естественного направления вращения (работа в IV квадранте); 2)если изменяется полярность напряжения на якоре (или реже на обмотке возбуждения), а якорь по инерции продолжает вращаться в прежнем направлении. Далее рассматривается наиболее часто встречающийся второй случай с изменением полярности напряжения на якоре. При этом ток якоря Iя=(-Uя- Eя)/ Rя меняет направление и значение его резко возрастает, т.к. теперь напряжение и ЭДС действуют в одном направлении. Поэтому при торможении противовключением в цепь якоря обязательно включается добавочное сопротивление Rд . Изменение полярности напряжения на якоре означает, что изменится и знак скорости идеального х.х. ω о.ид, т.е. механическая характеристика пройдет через III квадрант (). В момент переключения напряжения двигатель переходит из точки А естественной характеристики двигательного режима I в точку В реостатной характеристики тормозного режима 2, момент Мэм меняет знак и начинается интенсивное снижение ω. В точке С скорость двигателя равна нулю, и его нужно отключить от источника питания. Если этого не сделать, то ротор начнет вращаться в противоположном направлении и перейдет в установившийся режим в точке D реостатной или, если Rд отключить, в точке D’ новой естественной характеристики 3, т.е. произойдет реверсирование двигателя. Динамическое торможение осуществляется отключением цепи якоря от источника постоянного тока U и замыканием ее на некоторое добавочное сопротивление Rд, называемое обычно тормозным реостатом (, перевод переключателя К из левого положения в правое).
При этом напряжение, прикладываемое к якорю, Uя=0, ток якоря (см. 5.39) Iя=-Eя/(Rя+Rд) меняет направление и электромагнитный момент Мэм становится тормозным. Запасенная во вращающихся частях привода кинетическая механическая энергия преобразуется в электрическую, и машина работает в генераторном режиме, отдавая электрическую энергию тормозным сопротивлениям. Уравнение механических характеристик (5.37) при Uя=0 принимает вид ω=-Мэм(Rя+Rд)/(kФ)2. Механические характеристики тормозного режима расположены во II квадранте плоскости Мэм,ω (, Rд2>Rд3). В момент переключения двигатель переходит из точки А естественной характеристики двигательного режима 1 в точку В характеристики тормозного режима 2, момент Мэм меняет знак и начинается динамическое торможение. Угловая скорость уменьшается, но при этом довольно резко уменьшается и тормозной момент (переход из точки В в С). С целью увеличения тормозного момента производится уменьшение добавочного сопротивления Rд (переход из точки С в точку D). Торможение происходит до нулевой скорости.
Двигатели последовательного и смешанного возбуждения. У двигателя последовательного возбуждения () ток якоря протекает по обмотке возбуждения (Iв= Iя) и это определенным образом сказывается на основных характеристиках двигателя. При отсутствии насыщения магнитопровода можно принять, что
Ф=KфIя, (5.40)
где Kф – коэффициент пропорциональности. С учетом (5.40) уравнения (5.10) и (5.37) принимают вид
Мэм=KKфIя2, (5.41)
ω = (U/ √(KKфMэм)) -(Rя+Rв/KKф), (5.42)
где Rв – сопротивление обмотки возбуждения. Механическая характеристика ( пунктирная линия) мягкая, имеет гиперболическую форму и обеспечивает устойчивую работу двигателя. Мягкость характеристики объясняется тем, что с увеличением момента нагрузки и соответственно уменьшением скорости растут ток и поток возбуждения. При больших нагрузках начинает сказываться насыщение магнитопровода и характеристика отличается от расчетной (сплошная линия). Двигатель последовательного возбуждения нельзя пускать без нагрузки на валу, так как при Мэм → 0, угловая скорость ω → ∞. Квадратичная зависимость момента от тока позволяет при одинаковой кратности пускового тока получать у двигателя последовательного возбуждения больший пусковой момент, чем у двигателя независимого или параллельного возбуждения. Пуск, реверсирование, торможение и регулирование угловой скорости двигателей последовательного возбуждения осуществляется теми же способами, что и у двигателей независимого и параллельного возбуждения с учетом специфики включения обмоток.
Двигатели смешанного возбуждения по своим характеристикам занимают промежуточное положение между двигателями независимого и последовательного возбуждения. Конкретный вид характеристик зависит от того, согласно или встречно(по потоку) включены между собой обмотки возбуждения.
Назад | Оглавление | Вперед
Номинальная мощность, потребляемая двигателем из сети
где -номинальная механическая мощность на валу двигателя, кВт
-номинальный КПД, о.е.
Суммарные потери мощности в двигателе при номинальной нагрузке
Номинальный ток двигателя
где -номинальное напряжение, В
Номинальный ток возбуждения
где -сопротивление обмотки возбуждения, Ом
Номинальный ток якоря
Приближенно считаем, что электрические потери мощности в якорной цепи двигателя с параллельным возбуждением составляют половину суммарных потерь мощности в двигателе
Сопротивление якорной цепи двигателя
Рабочие характеристики двигателя , при
Номинальная угловая механическая скорость вращения якоря
где — номинальная частота вращения якоря, об/мин
Произведение конструктивной постоянной машины Се на номинальный магнитный поток Фн
Уравнение вращающих моментов
Электромагнитный момент двигателя
Mэм = Pэм / Ω,
который является движущим и действует в сторону вращения, расходуется на уравновешивание тормозящих моментов: 1) момента M0, соответствующего потерям pмг, pд и pмх, покрываемым за счет механической мощности [смотрите равенство (6) в статье «Общие сведения о генераторах постоянного тока»]; 2) Mв – момента нагрузки на валу, создаваемого рабочей машиной или механизмом; 3) Mдин – динамического момента [смотрите равенство (7) в статье «Общие сведения о генераторах постоянного тока»]. При этом
Mв = P2 /Ω
Таким образом,
| Mэм = M0 + Mв + Mдин | (1) |
или
| Mэм = Mст + Mдин | (2) |
где
Mст = M0 + Mв
является статическим моментом сопротивления.
При установившемся режиме работы, когда n = const и поэтому Mдин = 0,
| Mэм = Mст. | (3) |
В дальнейшем индекс «эм» у Mэм будем опускать. Обычно M0 мал по сравнению с Mв, и поэтому приблизительно можно считать, что при установившемся режиме работы Mэм = M является полезным моментом на валу и уравновешивается моментом Mв. Можно также значение M0 включить в значение Mв.
Укажем, что если выразить P в киловаттах, а Ω — через число оборотов в минуту nм, то между P, nм и M в кгс × м будет существовать зависимость
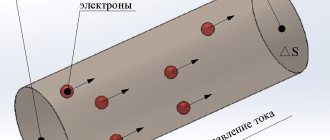
Уравнение напряжения и тока
В двигателях направление действия э. д. с. якоря Eа противоположно направлению тока якоря Iа (смотрите статью «Принцип действия машины постоянного тока»), и поэтому Eа называется также противоэлектродвижущей силой якоря. Уравнение напряжения для цепи якоря двигателя можно записать следующим образом:
| U = Eа + Rа × Iа. | (4) |
Здесь Rа – полное сопротивление цепи якоря [смотрите равенство (15) в статье «Общие сведения о генераторах постоянного тока»]. В режиме двигателя всегда U > Eа.
Из равенства (4) следует, что
| (5) |
где, согласно выражению (3), в статье «Основные электромагнитные соотношения. Электродвижущая сила якоря и электромагнитный момент»,
| Eа = cе × Фδ × n. | (6) |
Полезная механическая мощность на валу
Электрические потери мощности в якорной цепи
Электрическая мощность, потребляемая двигателем из сети
Ток, потребляемый двигателем из сети
КПД двигателя
Результаты расчёта рабочих характеристик
| 0 | 0,25 | 0,5 | 0,75 | 1,0 | 1,25 |
| 0 | 52,55 | 105,09 | 157,6 | 210,19 | 262,74 |
| 14 | 66,66 | 119 | 171,75 | 224 | 276,85 |
| 7,44 | 35,16 | 62,88 | 90,59 | 118 | 146 |
| 115,33 | 112,68 | 110,04 | 107,39 | 104,74 | 102,09 |
| 1101,86 | 1076,58 | 1051,29 | 1026,02 | 1000,74 | 975,46 |
| 0 | 5,92 | 11,56 | 16,93 | 22,02 | 26,83 |
| 0,01 | 0,224 | 0,716 | 1,485 | 2,533 | 3,859 |
| 2,27 | 8,41 | 14,54 | 20,68 | 26,81 | 32,95 |
| 10,32 | 34,21 | 66,09 | 93,98 | 121,87 | 149,75 |
| 0 | 0,704 | 0,795 | 0,819 | 0,821 | 0,814 |
График зависимостей I, M2 = f (P2)
График зависимости Р1 = f (Р2)
График зависимости h = f (P2 )
График зависимости n = f (P2)
Определение сопротивления пускового реостата
Сопротивление пускового реостата, если задан пусковой ток якоря
Механические характеристики двигателя при различных добавочных сопротивлениях в цепи якоря