Общие положения
Коэффициент полезного действия определяется как отношение полезной, или отдаваемой, мощности P2 к потребляемой мощности P1:
| (1) |
или в процентах
| (2) |
Современные электрические машины имеют высокий коэффициент полезного действия (к. п. д.). Так, у машин постоянного тока мощностью 10 кВт к. п. д. составляет 83 – 87%, мощностью 100 кВт – 88 – 93% и мощностью 1000 кВт – 92 – 96%. Лишь малые машины имеют относительно низкие к. п. д.; например, у двигателя постоянного тока мощностью 10 Вт к. п. д. 30 – 40%.
| Рисунок 1. Зависимость коэффициента полезного действия электрической машины от нагрузки |
Кривая к. п. д. электрической машины η = f(P2) сначала быстро растет с увеличением нагрузки, затем к. п. д. достигает максимального значения (обычно при нагрузке, близкой к номинальной) и при больших нагрузках уменьшается (рисунок 1). Последнее объясняется тем, что отдельные виды потерь (электрические Iа2rа и добавочные) растут быстрее, чем полезная мощность.
Вентильные реактивные электродвигатели
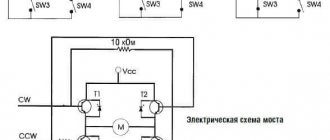
Вентильный реактивный двигатель (с английского SRM) создает вращающий момент за счет притягивания магнитных полей зубцов ротора к магнитному полю статора. Вентильные реактивные двигатели (ВРД) имеют относительно небольшое количество полюсов обмотки статора. Ротор имеет зубчатый профиль, что упрощает его конструкцию и улучшает создаваемое магнитное поле, в отличии от реактивных синхронных машин. В отличии от синхронных реактивных двигателей (СРД), ВРД используют импульсное возбуждение постоянного тока, что требует обязательное наличие специального преобразователя для их работы.
Для поддержания магнитного поля в ВРД необходимы токи возбуждения, что уменьшает плотность мощности по сравнению с электрическими машинами с постоянными магнитами (ПМ). Однако они все же имеют габаритные размеры меньшие, чем обычные АД.
Основным преимуществом вентильных реактивных машин является то, что ослабления магнитного поля происходит естественным образом при снижении тока возбуждения. Это свойство дает им большое преимущество в диапазоне регулирования при скоростях выше номинальной (диапазон устойчивой работы может достигать 10:1). Высокая эффективность присутствует у таких машин при работе на высоких скоростях и с малыми нагрузками. Также ВРД способны обеспечить удивительно постоянную эффективность в довольно широком диапазоне регулирования.
Вентильные реактивные машины обладают также довольно хорошей отказоустойчивостью. Без постоянных магнитов эти машины не генерируют неуправляемый ток и момент при неисправностях, а независимость фаз ВРД позволяет им работать с уменьшенной нагрузкой, но с повышенными пульсациями момента при выходе из строя какой-то из фаз. Это свойство может быть полезно, если проектировщики хотят повышенной надежности разрабатываемой системы.
Простая конструкция ВРД делает его прочным и недорогим в изготовлении. При его сборке не используются дорогие материалы, а ротор из нелегированной стали отлично подходит для суровых климатических условий и высоких скоростей вращения.
ВРД имеет коэффициент мощности меньший, чем ПМ или АД, но его преобразователю не нужно создавать выходное напряжение синусоидальной формы для эффективной работы машины, соответственно такие инверторы имеют меньшие частоты коммутации. Как следствие – меньшие потери в инверторе.
Основными недостатками вентильных реактивных машин являются наличие акустических шумов и вибрации. Но с этими недостатками довольно хорошо борются путем более тщательного проектирования механической части машины, улучшения электронного управления, а также механическое объединение двигатель – рабочий орган.
ВРД хорошо подходят для широкого спектра применения и их все чаще используют для обработки сверхпрочных материалов из-за большой перегрузочной способности и большого диапазона регулирования скоростей. Большая перегрузочная способность делает их все более привлекательными для использования в качестве тяговых электроприводов современных электромобилей. Также ВРД получили широкое распространение и в электробытовой технике.
Прямой и косвенный методы определения коэффициента полезного действия
Прямой метод определения к. п. д. по экспериментальным значениям P1 и P2 согласно формуле (1) может дать существенную неточность, поскольку, во-первых, P1 и P2 являются близкими по значению и, во-вторых, их экспериментальное определение связано с погрешностями. Наибольшие трудности и погрешности вызывает измерение механической мощности.
Если, например, истинные значения мощности P1 = 1000 кВт и P2 = 950 кВт могут быть определены с точностью 2%, то вместо истинного значения к. п. д.
η = 950/1000 = 0,95
можно получить
или
Поэтому ГОСТ 25941-83, «Машины электрические вращающиеся. Методы определения потерь и коэффициента полезного действия», предписывает для машин с η% ≥ 85% косвенный метод определения к. п. д., при котором по экспериментальным данным определяется сумма потерь pΣ.
Подставив в формулу (1) P2 = P1 — pΣ, получим
| (3) |
Применив здесь подстановку P1 = P2 + pΣ, получим другой вид формулы:
| (4) |
Так как более удобно и точно можно измерять электрические мощности (для двигателей P1 и для генераторов P2), то для двигателей более подходящей является формула (3) и для генераторов формула (4). Методы экспериментального определения отдельных потерь и суммы потерь pΣ описываются в стандартах на электрические машины и в руководствах по испытанию и исследованию электрических машин. Если даже pΣ определяется со значительно меньшей точностью, чем P1 или P2, при использовании вместо выражения (1) формул (3) и (4) получаются все же значительно более точные результаты.
Двигатели с постоянными магнитами
Двигатели с постоянными магнитами (английский PMMS) создают крутящий момент благодаря взаимодействию токов статора с постоянными магнитами внутри или снаружи ротора. Электродвигатели с поверхностным расположением магнитов являются маломощными и используются в IT оборудовании, офисной технике, автомобильном транспорте. Электродвигатели со встроенными магнитами (IPM) распространены в мощных машинах, используемых в промышленности.
Двигатели с постоянными магнитами (ПМ) могут использовать концентрированные (с коротким шагом) обмотки, если пульсации вращающего момента не являются критичными, но распределенные обмотки являются нормой в ПМ.
Поскольку PMMS не имеют механических коммутаторов, то преобразователи играют важную роль в процессе контроля тока обмотки.
В отличии от других видов бесщеточных электродвигателей, PMMS не требуют тока возбуждения, необходимого для поддерживания магнитного потока ротора. Следовательно, они способны обеспечить максимальный крутящий момент на единицу объема и могут быть лучшим выбором, если требования к массо-габаритным показателям выходят на первый план.
К наибольшим недостаткам таких машин можно отнести их очень высокую стоимость. Высокопроизводительные электрические машины с постоянными магнитами используют такие материалы как неодим и диспрозий. Данные материалы относятся к редкоземельным и добываются в геополитически нестабильных странах, что приводит к высоким и нестабильным ценам.
Также постоянные магниты добавляют производительности при работе на низких скоростях, но являются «Ахиллесовой пятой» при работе на высоких. Например, при увеличении скорости машины с постоянными магнитами возрастет и ее ЭДС, постепенно приближаясь к напряжению питания инвертора, при этом снизить поток машины не представляется возможным. Как правило, номинальная скорость является максимальной для ПМ с поверхностно-магнитной конструкцией при номинальном напряжении питания.
На скоростях больше номинальной, для электродвигателей с постоянными магнитами типа IPM, используют подавление активного поля, что достигается путем манипуляций с током статора при помощи преобразователя. Диапазон скорости, в котором двигатель может надежно работать, ограничен примерно 4:1.
Необходимость ослабления поля в зависимости от скорости приводит к потерям независящим от вращающего момента. Это снижает КПД на высоких скоростях, и особенно при малых нагрузках. Этот эффект наиболее актуален при использовании ПМ в качестве тягового автомобильного электропривода, где высокая скорость на автостраде неизбежно влечет за собой необходимость ослабления магнитного поля. Часто разработчики выступают за применение двигателей с постоянными магнитами в качестве тяговых электроприводов электромобилей, однако их эффективность при работе в данной системе довольно сомнительна, особенно после вычислений связанных с реальными циклами вождения. Некоторые производители электромобилей сделали переход от ПМ к асинхронным электродвигателям в качестве тяговых.
Также к существенным недостаткам электродвигателей с постоянными магнитами можно отнести их трудно управляемость в условиях неисправности из-за присущей им противо-ЭДС. Ток будет протекать в обмотках, даже при выключенном преобразователе, пока вращается машина. Это может приводить к перегреву и другим неприятным последствиям. Потеря контроля над ослабленным магнитным полем, например при аварийном отключении источника питания, может привести к неподконтрольной генерации электрической энергии и, как следствие, к опасному возрастанию напряжения.
Рабочие температуры – это еще одна не самая сильная сторона ПМ, кроме машин, изготовленных из самарий-кобальта. Также большие броски тока инвертора могут привести к размагничиванию.
Максимальная скорость PMMS ограничивается механической прочностью крепления магнитов. В случае повреждения ПМ его ремонт, как правило, осуществляется на заводе изготовителе, так как извлечение и безопасная обработка ротора практически невозможна в обычных условиях. И, наконец, утилизация. Да это тоже доставляет немного хлопот после окончания срока службы машины, но наличие редкоземельных материалов в этой машине должно упростить этот процесс в ближайшем будущем.
Несмотря на перечисленные выше недостатки, электродвигатели с постоянными магнитами являются непревзойденными с точки зрения низкоскоростных мелкогабаритных механизмов и устройств.
Три основных типа изделий по режиму работы электродвигателя
Три основных типа изделий по режиму работы электродвигателя — это изделия с постоянной частотой вращения, переменной частотой вращения и управлением положением (или регулированием крутящего момента) ротора. В различных изделиях промышленной автоматики требуются разные режимы, и набор вопросов, на который приходится отвечать при выборе электродвигателя, может также различаться (рис. 2).
Рис. 2. Асинхронные электродвигатели переменного тока часто выбирают для промышленных машин с вращательным движением рабочего органа
Например, если требующаяся максимальная частота вращения ротора меньше номинальной, может понадобиться редуктор. Возможно, для этой цели удастся подобрать более компактный электродвигатель, частота вращения ротора которого будет обеспечивать более высокий КПД. В Интернете есть большое количество информации о том, как выбирать электродвигатель по размеру, но пользователям необходимо принимать во внимание и другие факторы. Для расчета момента инерции нагрузки, крутящего момента и частоты вращения ротора требуется знать такие параметры, как полная масса и размер (радиус) нагрузки, а также коэффициент трения, потери на редукторе и цикл работы машины. Кроме того, во избежание перегрева электродвигателя необходимо учитывать изменение нагрузки, темп разгона или торможения и рабочий цикл изделия.
Определившись с типом и размером электродвигателя, пользователю нужно также учесть влияние внешних факторов и выбрать исполнение — например, открытое или в кожухе из нержавеющей стали для работы во влажной среде.
Как узнать выходную мощность
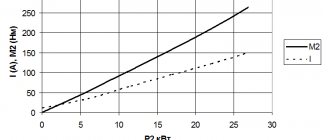
Двигатели как предполагается, выполняют какую-то работу, и два важных значения, которые определяют, насколько он мощный. Это скорость и сила поворота двигателя. Выходная механическая мощность двигателя может быть рассчитана по следующей формуле:
Pout = τ * ω
где Pout — выходная мощность, измеренная в ваттах (Вт);
τ — момент силы, измеренный в метрах Ньютона (N • м);
ω — угловая скорость, измеренная в радианах в секунду (рад / с).
Легко рассчитать угловую скорость, если вы знаете скорость вращения двигателя в об / мин:
ω = rpm * 2 * П / 60
где ω — угловая скорость (рад / с);
об / мин — скорость вращения в оборотах в минуту;
П — математическая константа (3.14);
60 — количество секунд в минуте.
Если двигатель имеет 100% КПД, вся электрическая энергия преобразуется в механическую энергию. Однако таких двигателей не существует. Даже прецизионные малые промышленные двигатели, имеют максимальную эффективность 50—60%.
Измерение момент силы двигателя является сложной задачей. Для этого требуется специальное дорогостоящее оборудование. Но это возможно сделать и самому обладая специальной информацией и формулами.
Выбор электродвигателя: три вопроса
Даже после того, как все эти решения приняты, пользователю необходимо ответить на следующие три вопроса, прежде чем сделать окончательный выбор.
Требуется ли постоянная частота вращения ротора?
В изделиях с постоянной частотой вращения ротора электродвигатель часто работает на приблизительно установленной частоте, а характеристики разгона и торможения роли практически не играют. В этом случае обычно применяется релейное управление с питанием непосредственно от сети. Цепи управления часто состоят из ответвления с предохранителем и контактором, устройства защиты от перегрузки при пуске и ручного регулятора электродвигателя или устройства плавного пуска.
Для изделий с постоянной частотой вращения ротора подходят электродвигатели переменного и постоянного тока. Электродвигатели постоянного тока обеспечивают номинальный крутящий момент при нулевой частоте вращения; этот тип электродвигателей очень популярен. Электродвигатели переменного тока — тоже хороший выбор, так как они характеризуются высоким коэффициентом мощности и нетребовательны в обслуживании. Серводвигатель или шаговый двигатель с высокими эксплуатационными характеристиками был бы излишним для простого изделия.
Требуется ли переменная частота вращения ротора?
Изделия с переменной частотой вращения ротора обычно требуют изменения линейной скорости и частоты вращения с малой погрешностью, а также четко определенных характеристик разгона и ускорения. Уменьшение частоты вращения ротора в таких изделиях, как вентиляторы и центробежные насосы, часто позволяет повысить КПД за счет согласования мощности с нагрузкой вместо работы на максимальной частоте с пропорциональным регулированием или демпфированием. Это важно для конвейерных систем, например линий бутылочного розлива.
Электродвигатели как переменного, так и постоянного тока с приводами соответствующего типа эффективно работают в изделиях с переменной частотой вращения ротора. На протяжении длительного времени привод с электродвигателем постоянного тока был единственным вариантом для изделий с переменной частотой вращения ротора, и компоненты для этой комбинации хорошо отработаны и проверены временем. Даже сейчас электродвигатели постоянного тока широко применяются в маломощных (менее 1 л. с.) изделиях этого типа, а также оказываются полезными в изделиях с низкой частотой вращения ротора, так как обеспечивают номинальный крутящий момент на низкой частоте вращения и постоянный крутящий момент в широком диапазоне частот.
Слабой стороной электродвигателей постоянного тока может быть обслуживание, так как во многих из них для коммутации используются щетки, которые со временем изнашиваются от контакта с подвижными частями. Бесколлекторные электродвигатели постоянного тока свободны от этого недостатка, но дороже в приобретении, а их ассортимент — уже.
Избавлены от этой проблемы и асихронные электродвигатели переменного тока, а вкупе с частотно-регулируемым приводом (рис. 3) они позволяют получить более высокий КПД в изделиях мощностью более 1 л. с., таких как вентиляторы и насосы. Некоторые типы приводов предусматривают обратную связь по положению. Если этого требует характер изделия, можно дополнить электродвигатель датчиком перемещений и выбрать привод, использующий сигнал от этого датчика для обратной связи. Такая конфигурация может обеспечить такое же регулирование частоты вращения ротора, как в серводвигателе.
Рис. 3. Сочетание электродвигателя постоянного тока с частотно-регулируемым приводом широко применяется для повышения КПД и эффективно работает в разнообразных изделиях с переменной частой вращения ротора
Требуется ли управление положением ротора?
Управление положением ротора электродвигателя с малой погрешностью обеспечивается путем непрерывной проверки его положения в процессе вращения. В изделиях, где требуется, например, задавать положение линейного привода, можно применять шаговый электродвигатель с обратной связью или без таковой, а также серводвигатель со встроенной обратной связью.
Шаговый электродвигатель предназначен для перемещения в заданное положение на умеренной скорости с последующим сохранением этого положения. Шаговый электродвигатель без обратной связи по положению обеспечивает весьма точное управление положением ротора, если правильно выбрать его размер, а также перемещение на точно заданное число шагов (если только он не столкнется с изменением нагрузки, превышающим его возможности).
С ростом требуемой частоты вращения и динамических нагрузок шаговый привод без обратной связи может уже не обеспечить нужных характеристик системы, и тогда понадобится шаговый привод с обратной связью или сервопривод.
Система с обратной связью обеспечивает точное высокоскоростное перемещение по заданному профилю и регулирование положения ротора. Серводвигатель обеспечивает больший крутящий момент на высоких частотах вращения в сравнении с шаговым электродвигателем, а также эффективнее работает в изделиях, характеризующихся высокими динамическими нагрузками или сложным характером перемещения.
Для быстрого и/или резкого перемещения с малым перерегулированием по положению момент инерции нагрузки должен быть как можно лучше согласован с моментом инерции серводвигателя. Рассогласование в пропорции до 10:1 приемлемо в некоторых применениях, но оптимальным является согласование 1:1.
Уменьшение частоты вращения посредством редуктора — оптимальный способ решить проблему рассогласования моментов инерции, поскольку момент инерции нагрузки обратно пропорционален квадрату передаточного отношения редуктора. При этом в расчетах необходимо учитывать момент инерции редуктора.