Существует несколько способов управления частотным преобразователем. В процессе работы ПЧ происходит оперативный контроль следующих функций:
Пуск – Останов
(Старт – Стоп). Управление началом вращения и торможением подключенного двигателя.
Установка скорости.
Настройка рабочей скорости привода.
Аварийный останов.
Аварийное снятие силового питания, сигнал разрешения работы.
Эти изменения в работе ПЧ производятся путем подачи сигналов с внешних устройств либо с панели управления. Остальными параметрами можно управлять исключительно с панели управления, причем некоторые из них активны только при выключенном двигателе.
Способы управления могут быть следующими
:
- управление с помощью клавиатуры (панели управления) частотного преобразователя
- управление с помощью пульта ДУ
- аналоговый вход (изменение текущей скорости вращения двигателя)
- дискретные входы (изменение различных состояний и параметров преобразователя)
- последовательный интерфейс RS-485 либо его аналог
Рассмотрим управление преобразователем на примере ПЧ Prostar PR6000.
Управление через аналоговый вход
В преобразователе частоты PR6000 имеется два аналоговых входа – AI1 и AI2. Это выгодно отличает его от других моделей с одним аналоговым входом.
Вход AI1 может использоваться для управления по напряжению с входным сопротивлением 47 кОм. Вход AI2 имеет выбор, который производится переключателем: токовый вход с входным сопротивлением 500 Ом, или вход по напряжению.
Управление через дискретные входы
У преобразователя PR6000 имеется 8 дискретных (цифровых) входов: FWD (вперед/стоп), REW (назад/стоп) и 6 входов DI1…DI6.
Входы FWD и REW могут работать в двух- и трехпроводном режиме, при этом третий провод программируется на одном из входов DI1…DI6. Выбор режима управления скоростью устанавливается в параметре Р077.
Дискретные входы DI1…DI6 являются многофункциональными, они программируются на разные функции, которые запускаются при активации соответствующего входа.
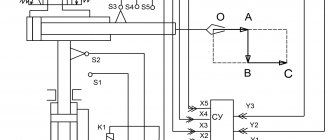
Набор возможных функций: выбор многоскоростного режима, выбор разгона/замедления, включение вращения в режиме JOG вперед/назад, управление остановом, увеличение/уменьшение частоты, вход сигнализации неисправности (аварии), пауза при пуске, трехпроводное управление пуском/стопом, торможение постоянным током, сброс ошибки/сообщения, работа по качающейся частоте, включение/сброс/вход счетчика. Всего можно выбрать до 20 различных параметров, которые устанавливаются в параметрах Р071…Р076 для каждого входа. Активация дискретных входов происходит путем замыкания нужного входа на клемму СОМ. Причем, это может производиться разными способами — выходом контроллера, контактами реле, датчика или ручной кнопки. Дискретные и аналоговые входы показаны ниже.
Управление через последовательный интерфейс
При работе через интерфейс RS-485 преобразователь частоты управляется контроллером либо персональным компьютером через специальный адаптер-преобразователь RS-485/RS-232.
Через этот интерфейс преобразователь может не только принимать команды на изменения параметров и состояния, но и выдавать информацию о своем текущем состоянии на другие устройства. Также по интерфейсу RS-485 может поддерживаться связь с другими преобразователями.
Далее поговорим о способах оперативного управления режимами ПЧ.
Старт/Стоп двигателя
Запуск и останов двигателя может производиться следующими способами.
- С панели управления преобразователя частоты. Для этого используются кнопки RUN, STOP/RESET. Если нужен кратковременный запуск, используется кнопка JOG.
- Подачей сигнала на дискретные входы FWD, REW при двухпроводном управлении. Для трехпроводного управления нужно задействовать один из дискретных входов DI1…DI6 и запрограммировать его соответствующим образом. Режим выбирается параметром Р077. Любой из этих входов можно также использовать для импульсного запуска (команда JOG). При двухпроводном управлении для работы двигателя необходим постоянный сигнал на соответствующих входах. При трехпроводном достаточно кратковременного сигнала.
- Через последовательный интерфейс командами с контроллера. Выбор источника команды Старт/Стоп в ПЧ Prostar PR6000 производится в параметре Р006.
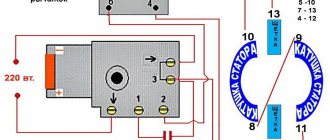
Двухпроводное управление пуском/остановом
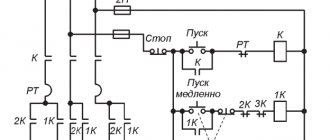
Трехпроводное управление пуском/остановом
Частотно-регулируемые приводы
В обиход различных сфер промышленности, которые используют насосное, вентиляционное оборудование, конвейерные установки, объекты генерации (ТЭЦ, ГРЭС и т.п.) и др. вошли такие установки, как частотно-регулируемые приводы (ЧРП), также называемые преобразователями частоты (ПЧ). Данные установки и позволяют изменять частоту и амплитуду трехфазного напряжения, поступающего на электродвигатель, за счет чего и достигается гибкое изменение режимов работы управляющих механизмов.
Высоковольтный частотно-регулируемый привод
Конструктив ЧРП
Приведем краткое описание существующих преобразователей частоты.
Конструктивно преобразователь состоит из функционально связанных блоков: блока входного трансформатора (шкаф трансформатора); многоуровневого инвертора (шкаф инвертора) и системы управления и защит с блоком ввода и отображения информации (шкаф управления и защит).
В шкафу входного трансформатора производится передача энергии от трехфазного источника питания входным многообмоточным трансформатором, который распределяет пониженное напряжение на многоуровневый инвертор.
Многоуровневый инвертор состоит из унифицированных ячеек – преобразователей. Количество ячеек определяется конкретным конструктивом и заводом-изготовителем. Каждая ячейка оснащена выпрямителем и фильтром звена постоянного тока с мостовым инвертором напряжения на современных IGBT транзисторах (биполярный транзистор с изолированным затвором). Первоначально выпрямляется входной переменный ток, а затем с помощью полупроводникового инвертора преобразуется в переменный ток с регулируемой частотой и напряжением.
Полученные источники управляемого переменного напряжения соединяются последовательно в звенья, формируя фазу напряжения. Построение выходной трехфазной системы питания асинхронного двигателя производится включением звеньев по схеме «ЗВЕЗДА».
Система управления защиты располагается в шкафу управления и защиты и представлена многофункциональным микропроцессорным блоком с системой питания от источника собственных нужд преобразователя, устройством ввода-вывода информации и первичными сенсорами электрических режимов работы преобразователя.
Управление частотой
ПЧ может управлять скоростью несколькими способами в зависимости от конкретного оборудования.
- Управление скоростью при помощи переменного резистора, установленного на клавиатуре (панели управления) ПЧ.
- Дискретное изменение при помощи клавиш панели управления Вверх/Вниз.
- Дискретное изменение при помощи контактов (любых двух), подключенных ко входам DI1…DI6. При активации соответствующего дискретного входа происходит уменьшение либо увеличение скорости в заданных пределах с заданным шагом. Примечание. В вариантах 2 и 3 при включении питания двигатель запускается на частоту, установленную в параметре Р005. В процессе работы частоту можно оперативно изменять. Если измененное значение частоты необходимо запомнить, используется параметр Р155.
- Задание скорости при помощи аналоговых сигналов напряжения или тока, поступающих на входы AI1, AI2. Аналоговые сигналы могут комбинироваться в разных вариантах.
- Задание в соответствии с частотой импульсов на входе DI6.
- Через интерфейс RS-485 от контроллера. Выбор канала управления частотой осуществляется параметром Р004. Верхняя и нижняя рабочие частоты устанавливаются в параметрах Р009 и Р010. Скорость работы двигателя в импульсном (толчковом) режиме JOG задается параметром Р052.
Согласно последним данным статистики примерно 70% всей выработанной электроэнергии в мире потребляет электропривод. И с каждым годом этот процент растет.
При правильно подобранном способе управления электродвигателем возможно получение максимального КПД, максимального крутящего момента на валу электромашины, и при этом повысится общая производительность механизма. Эффективно работающие электродвигатели потребляют минимум электроэнергии и обеспечивают максимальную экономичность.
Для электродвигателей, работающих от преобразователя частоты ПЧ, эффективность во многом будет зависеть от выбранного способа управления электрической машиной. Только поняв достоинства каждого способа, инженеры и проектировщики систем электроприводов смогут получить максимальную производительность от каждого способа управления.
Для асинхронных электродвигателей, подключенных к преобразователю частоты, существуют следующие основные способа управления:
1. Скалярное
· Скалярное управление U/f;
· Скалярное управление U/f с энкодером;
2. Векторное
· Векторное управление с разомкнутым контуром;
· Векторное управление с замкнутым контуром;
Все четыре метода используют широтно-импульсную модуляцию ШИМ, которая изменяет ширину фиксированного сигнала путем изменения длительности импульсов для создания аналогового сигнала.
СКАЛЯРНОЕ РЕГУЛИРОВАНИЕ
Способ управления U/f
Скалярный метод управления асинхронным электродвигателем переменного тока, заключается в том, чтобы поддерживать постоянным отношение напряжение/частота (U/f) во всем рабочем диапазоне скоростей, при этом контролируется только величина и частота питающего напряжения.
Отношение U/f вычисляется на основе номинальных значений (напряжения и частоты) контролируемого электродвигателя переменного тока. Поддерживая постоянным значение отношения U/f мы можем поддерживать относительно постоянным магнитный поток в зазоре двигателя. Если отношение U/f увеличивается тогда электродвигатель становится перевозбужденным и наоборот если отношение уменьшается двигатель находится в невозбуждённом состоянии.
Зависимость частоты питания двигателя от времени при скалярном упрравлении
Изменение напряжения питания электродвигателя при скалярном управлении
На низких оборотах необходимо компенсировать падение напряжения на сопротивлении статора, поэтому отношение U/f на низких оборотах устанавливают выше чем номинальное значение. Скалярный метод управления наиболее широко используется для управления асинхронными электродвигателями. Он часто используется в несложных системах электропривода из-за своей простоты и минимального количества необходимых для работы параметров. Такой способ управления не требует обязательной установки энкодера и обязательных настроек для частотно-регулируемого электропривода. Это приводит к меньшим затратам на вспомогательное оборудование (датчики, провода обратных связей, реле и так далее). Управление U/f довольно часто применяют в высокочастотном оборудовании, например, его часто используют в станках с ЧПУ для привода вращения шпинделя.
U/f — это единственный способ регулирования скорости асинхронного электродвигателя, который позволяет регулирование нескольких электроприводов от одного преобразователя частоты. Соответственно все машины запускаются и останавливаются одновременно и работают с одной частотой.
Но данный способ управления имеет несколько ограничений. Например, при использовании способа регулирования U/f без энкодера нет абсолютно никакой уверенности, что вал асинхронной машины вращается. Кроме того, пусковой момент электрической машины при частоте 3 Гц ограничивается 150%. Да, ограниченного крутящего момента более чем достаточно для применения в большинстве существующего оборудования. Например, практически все вентиляторы и насосы используют способ регулирования U/f.
Данный метод относительно прост из-за его более «свободной» спецификации. Регулирование скорости, как правило, лежит в диапазоне 2% — 3% максимальной выходной частоты. Отклик по скорости рассчитывается на частоту свыше 3 Гц. Скорость реагирования частотного преобразователя определяется быстротой его реакции на изменение опорной частоты. Чем выше скорость реагирования – тем быстрее будет реакция электропривода на изменение задания скорости.
Диапазон регулирования скорости при использовании способа U/f составляет 1:40. Умножив это соотношение на максимальную рабочую частоту электропривода, получим значение минимальной частоты, на которой сможет работать электрическая машина. Например, если максимальное значение частоты 60 Гц, а диапазон составляет 1:40, то минимальное значение частоты составит 1,5 Гц.
Паттерн U/f определяет соотношение частоты и напряжения в процессе работы частотно-регулируемого электропривода. Согласно ему, кривая задания скорости вращения (частота электродвигателя) будет определять помимо значения частоты еще и значения напряжения, подводимого к клеммам электрической машины.
Операторы и технические специалисты могут выбрать необходимый шаблон регулирования U/f одним параметром в современном частотном преобразователе. Предустановленные шаблоны уже оптимизированы под конкретные применения. Также существуют возможности создания своих шаблонов, которые будут оптимизироваться под конкретную систему частотно-регулируемого электропривода или электродвигателя.
Такие устройства как вентиляторы или насосы имеют момент нагрузки, который зависит от скорости их вращения. Переменный крутящий момент (рисунок выше) шаблона U/f предотвращает ошибки регулирования и повышает эффективность. Эта модель регулирования уменьшает токи намагничивания на низких частотах за счет снижения напряжения на электрической машине.
Механизмы с постоянным крутящим моментом, такие как конвейеры, экструдеры и другое оборудование используют способ регулирования с постоянным моментом. При постоянной нагрузке необходим полный ток намагничивания на всех скоростях. Соответственно характеристика имеет прямой наклон во всем диапазоне скоростей.
Способ управления U/f с энкодером
При скалярном методе управления, скорость асинхронного электродвигателя контролируется установкой величины напряжения и частоты статора, таким образом, чтобы магнитное поле в зазоре поддерживалось на нужной величине. Для поддержания постоянного магнитного поля в зазоре, отношение U/f должно быть постоянным на разных скоростях.
При увеличении скорости напряжение питания статора так же должно пропорционально увеличиваться. Однако синхронная частота асинхронного двигателя не равна частоте вращения вала, а скольжение асинхронного двигателя зависит от нагрузки. Таким образом система контроля со скалярным управлением без обратной связи не может точно контролировать скорость при наличии нагрузки. Для решения этой задачи в систему может быть добавлена обратная связь по скорости, а следовательно и компенсация скольжения.
Таким образом, если необходимо повысить точность регулирования скорости вращения в систему управления добавляют энкодер. Введение обратной связи по скорости с помощью энкодера позволяет повысить точность регулирования до 0,03%. Выходное напряжение по-прежнему будет определятся заданным шаблоном U/f.
Данный способ управления не получил широкого применения, так как представляемые им преимущества по сравнению со стандартными функциями U/f минимальны. Пусковой момент, скорость отклика и диапазон регулирования скорости – все идентично со стандартным U/f. Кроме того, при повышении рабочих частот могут возникнуть проблемы с работой энкодера, так как он имеет ограниченное количество оборотов.
Когда используется скалярное управлени
Скалярное управление электродвигателями переменного тока — хорошая альтернатива для применений, где нет переменной нагрузки и отсутвуют высокие динамические нагрузки (вентиляторы, насосы). Для работы скалярного управления не требуется датчик положения ротора, а скорость ротора может быть оценена по частоте питающего напряжения. Когда используется скалярное управление, не требуется высокопроизводительный цифровой сигнальный процессор как в случае с векторным управлением.
Недостатки скалярного управления
При скалярном управлении электродвигателем токи статора не контролируются напрямую.
А процесс скалярного регулирования синхронного двигателя с постоянными магнитами может легко стать неуправляемым (выйти из синхронного состояния) особенно когда момент нагрузки превышает значение предельного момента электропривода. Скалярный метод не подходит для управления синхронным двигатлем на низких оборотах с высокими динамическими нагрузками.
Метод скалярного управления относительно прост в реализации, но обладает несколькими существенными недостатками:
· во-первых, если не установлен датчик скорости нельзя управлять скоростью вращения вала асинхронного двигателя, так как она зависит от нагрузки (наличие датчика скорости решает эту проблему), а вслучае с синхронным двигателем при изменении нагрузки — можно совсем потерять управление;
· во-вторых, нельзя управлять моментом. Конечно, эту задачу можно решить с помощью датчика момента, но стоимость его установки очень высока, и будет скорее всего выше самого электропривода. При этом управление моментом будет очень инерционным;
· также нельзя управлять одновременно моментом и скоростью.
Скалярное управление достаточно для большинства задач в которых применяется электропривод с диапазоном регулирования частоты вращения двигателя до 1:10.
Когда требуется максимальное быстродействие, возможность регулирования в широком диапазоне скоростей и возможность управления моментом электродвигателя используется векторное управление.
ВЕКТОРНОЕ РЕГУЛИРОВАНИЕ
Векторное управление — метод управления бесщеточными электродвигателями переменного тока, который позволяет независимо и практически безынерционно регулировать скорость вращения и момент на валу электродвигателя.
Главная идея векторного управления заключается в том, чтобы контролировать не только величину и частоту напряжения питания, но и фазу. Другими словами, контролируется величина и угол пространственного вектора. Векторное управление в сравнении со скалярным обладает более высокой производительностью. Векторное управление избавляет практически от всех недостатков скалярного управления.
Векторное управление без обратной связи
Векторное управление (ВУ) без обратной связи используется для более широкого и динамичного регулирования скорости электрической машины. При пуске от преобразователя частоты электродвигатели могут развивать пусковой момент в 200% от номинального при частоте всего 0,3 Гц. Это значительно расширяет перечень механизмов, где может быть применен асинхронный электропривод с векторным управлением. Этот метод также позволяет управлять моментом машины во всех четырех квадрантах.
Ограничение вращающего момента осуществляется двигателем. Это необходимо для предотвращения повреждения оборудования, машин или продукции. Значение моментов разбивают на четыре различных квадранта, в зависимости направления вращения электрической машины (вперед или назад) и в зависимости от того, реализует ли электродвигатель режим рекуперативного торможения. Ограничения могут устанавливаться для каждого квадранта отдельно или же пользователь может задать общий вращающий момент в преобразователе частоты.
Двигательный режим асинхронной машины будет при условии, что магнитное поле ротора отстает от магнитного поля статора. Если магнитное поле ротора начнет опережать магнитное поле статора, то тогда машина войдет в режим рекуперативного торможения с отдачей энергии, проще говоря – асинхронный двигатель перейдет в генераторный режим.
Например, машина по закупорке бутылок может использовать ограничение момента в квадранте 1 (направление вперед с положительным моментом) для предотвращения чрезмерного затягивания крышки бутылки. Механизм производит движение вперед и использует положительный момент для того, чтобы закрутить крышку бутылки. А вот устройство, такое как лифт, с противовесом тяжелее, чем пустая кабина, будет использовать квадрант 2 (обратное вращение и положительный момент). Если кабина подымается на верхний этаж, то крутящий момент будет противоположен скорости. Это необходимо для ограничения скорости подъема и недопущения свободного падения противовеса, так как он тяжелее, чем кабина.
Обратная связь по току в данных преобразователях частоты ПЧ позволяет устанавливать ограничения по моменту и току электродвигателя, поскольку при увеличении тока растет и момент. Выходное напряжение ПЧ может изменятся в сторону увеличения, если механизм требует приложения большего крутящего момента, или уменьшатся, если достигнуто его предельно допустимое значение. Это делает принцип векторного управления асинхронной машиной более гибким и динамичным по сравнению с принципом U/F.
Также частотные преобразователи с векторным управлением и разомкнутым контуром имеют более быстрый отклик по скорости – 10 Гц, что делает возможным его применение в механизмах с ударными нагрузками. Например, в дробилках горной породы нагрузка постоянно меняется и зависит от объема и габаритов обрабатываемой породы.
В отличии от шаблона управления U/F векторное управление использует векторный алгоритм, для определения максимально эффективного напряжения работы электродвигателя.
Векторное управления ВУ решает данную задачу благодаря наличию обратной связи по току двигателя. Как правило, обратная связь по току формируется внутренними трансформаторами тока самого преобразователя частоты ПЧ. Благодаря полученному значению тока преобразователь частоты проводит вычисления вращающего момента и потока электрической машины. Базовый вектор тока двигателя математически расщепляется на вектор тока намагничивания и крутящего момента.
Используя данные и параметры электрической машины ПЧ вычисляет векторы тока намагничивания и крутящего момента. Для достижения максимальной производительности, преобразователь частоты должен держать данные вектора разведенными на угол 900. Это существенно, так как sin 900 = 1, а значение 1 представляет собой максимальное значение крутящего момента.
В целом векторное управление асинхронным электродвигателем осуществляет более жесткий контроль. Регулирование скорости составляет примерно ±0,2% от максимальной частоты, а диапазон регулирования достигает 1:200, что позволяет сохранять вращающий момент при работе на низких скоростях.
Векторное управление с обратной связью
Векторное управление с обратной связью использует тот же алгоритм управления, что и ВУ без обратной связи. Основное различие заключается в наличии энкодера, что дает возможность частотно-регулируемому электроприводу развивать 200% пусковой момент при скорости 0 об/мин. Этот пункт просто необходим для создания начального момента при трогании с места лифтов, кранов и других подъемных машин, чтоб не допустить просадки груза.
Наличие датчика обратной связи по скорости позволяет увеличить время отклика системы более 50 Гц, а также расширить диапазон регулирования скорости до 1:1500. Также наличие обратной связи позволяет управлять не скоростью электрической машиной, а моментом. В некоторых механизмах именно значение момента имеет большую важность. Например, мотальная машина, механизмы закупорки и другие. В таких устройствах необходимо регулировать момент машины.
Преимущества векторного управления:
· высокая точность регулирования скорости;
· плавный старт и плавное вращение двигателя во всем диапазоне частот;
· быстрая реакция на изменение нагрузки: при изменении нагрузки практически не происходит изменения скорости;
· увеличенный диапазон управления и точность регулирования;
· снижаются потери на нагрев и намагничивание, повышается КПД электродвигателя.
К недостаткам векторного управления можно отнести:
· необходимость задания параметров электродвигателя;
· большие колебания скорости при постоянной нагрузке;
· большая вычислительная сложность.
Сравнительная таблица методов управления частотным преобразователем.
| Метод управления | Диапазон управления скоростью | Погрешность скорости3, % | Время нарастания момента, мс | Пусковой момент | Цена | Описание | ||
| Скалярный | 1:101 | 5-10 | Не доступно | Низкий | Очень низкая | Имеет медленный отклик при изменении нагрузки и небольшой диапазон регулирования скорости, но при этом прост в реализации. | ||
| Векторный | Линейный | Полеориентированное управление | >1:2002 | 0 | <1-2 | Высокий | Высокая | Позволяет плавно и быстро управлять основными параметрами двигателя — моментом и скоростью. Для работы данного метода требуется информация о положении ротора. |
| Прямое управление моментом с ПВМ | >1:2002 | 0 | <1-2 | Высокий | Высокая | Гибридный метод, разработанный для того чтобы объединить преимущества https://engineering-solutions.ru/motorcontrol/vector/#foc и https://engineering-solutions.ru/motorcontrol/vector/#dtc. | ||
| Нелинейный | Прямое управление моментом с таблицей включения | >1:2002 | 0 | <1 | Высокий | Высокая | Имеет высокую динамику и простую схему, но характерной особенностью его работы являются высокие пульсации тока и момента. | |
| Прямое самоуправление | >1:2002 | 0 | <1-2 | Высокий | Высокая | Имеет частоту переключения инвертора ниже чем у других методов и предназначен для уменьшения потерь при управлении электродвигателями большой мощности. | ||
Список используемой литературы:
1. Botan Electric. «Как правильно выбрать метод управления преобразователем частоты? https://elenergi.ru, 2016
2. Cristian Busca. «Open loop low speed control for PMSM in high dynamic application.- Aalborg, Denmark.»: Aalborg universitet, 2010
3. Bial Akin, «Nishant Garg. Scalar (V/f) control of 3-phase induction motors. Application report. SPRABQ8.- Dallas, USA.»: Texas Instruments
4. Статьи https://engineering-solutions.ru
Аварийный останов ПЧ
Кроме штатного останова функцией Стоп с заданным замедлением используются два способа экстренного останова двигателя и отключения ПЧ.
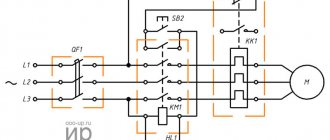
- Аварийный останов прерыванием питания. Для этого производители рекомендуют перед силовым питанием ПЧ устанавливать трехфазный линейный контактор, питание катушки которого зависит от состояния аварийной цепи всего оборудования. При нажатии на кнопку «Аварийный останов» или другом экстренном случае питание контактора отключается, и напряжение с ПЧ снимается. Таким образом двигатель гарантированно остановится.
- Используется функция дискретного входа DI1…DI6 «Сигнализация неисправности внешнего устройства». Если запрограммировать нужный вход на эту функцию, в случае подачи на него аварийного сигнала преобразователь остановится.
Другие полезные материалы:
Тонкости настройки преобразователя частоты FAQ по электродвигателям Настройка преобразователя частоты для работы на несколько двигателей Назначение и виды энкодеров
Схема подключения преобразователя частоты
После переделки вся схема станка, содержащая два привода, имеет вид:
Схема подключения преобразователя частоты
Первым делом скажу, что если делать всё по уму, то надо обеспечить защиту по входу – поставить быстродействующие предохранители или, на худой конец, автоматы с характеристикой “В”. Но что есть, то есть – из защиты только советский 3п С6.
Приводы вытяжки и полировки имеют две общих части – питание и кнопку “Стоп”. Кнопка “Стоп” (SB3) имеет два электрически независимых контакта, которые останавливают оба привода сразу.
Особо придирчивые читатели обязательно упрекнут меня в моих словах, что “ноль в питании станка не используется”. Но у меня готов ответ)))
Привод вытяжки подключен по классической схеме с самоподхватом, о которой я писал неоднократно. Ссылки – в начале статьи.
Рассмотрим поближе то, что нас интересует – схему подключения ПЧ:
Рабочая схема подключения ПЧ Delta
По силовой части я уже говорил, там всё просто.
По части управления. На схеме обозначены названия клемм, их видно и на фото установки. Чтобы вся схема работала правильно, все эти клеммы нужно правильно запрограммировать, без этого в подключении ПЧ никуда. Поэтому настройка ПЧ и его подключение – два неразрывно связанных понятия.
По настройке и подключению ПЧ