Чаще реверсирование двигателя выполняется одним реверсивным магнитным пускателем.
В многодвигательных приводах или приводах механизмов, связанных общей технологической зависимостью, должна быть обеспечена определенная очередность включения и отключения электродвигателей. Двигатель останавливается. Блокировки применяют также при установке ограждений в опасных зонах оборудования. В цепи магнитного пускателя включен контакт, принадлежащий контактору, управляющему двигателем. Нереверсивная схема магнитного пускателя
Сработавшие замыкающие контакты реле динамического торможения K3. Если двигатель останавливается, автоматически выключается двигатель. Если же давление в системе смазки компрессора упадет, то замкнется контакт РДМ, создастся замкнутая цепь тревожной сигнализации и сработает звонок на схеме не показан. Одновременно блок-контакт Л1 размыкается и обесточивает реле РУ1. Управлять асинхронным двигателем можно и с большего числа мест Рисунок 5 — Схема управления электродвигателем с двух мест при наличии соответствующего количества кнопочных станций Рисунок 6 — Схема управления асинхронным двигателем с помощью реверсивного магнитного пускателя: а — силовая цепь; б — цепь управления с электрической блокировкой контактами магнитного пускателя и контактами кнопочной станции; в — цепь управления с электрической блокировкой контактами магнитного пускателя Реверсивные магнитные пускатели комплектуются из двух нереверсивных.
Вспомогательный контакт КМ в цепи управления шунтирует кнопочный выключатель SBС и обеспечивает продолжительную работу привода после снятия нагрузки нажатия с кнопочного выключателя. Схема нереверсивного управления трёхфазным асинхронным двигателем с короткозамкнутым ротором при динамическом торможении. В приводах, где применяются двигатели с короткозамкнутым ротором, частоту вращения электродвигателя изменяют путем изменения числа пар полюсов. Электродвигатель обладает высоким пусковым моментом и не допускает прямого пуска.
Двухпроводная схема управления стрелкой
Схемы управления электроприводами
Схема пуска асинхронного двигателя с фазным ротором с помощью магнитной станции П При включённом трёхполюсном, выключателе Q1, выполненном в виде рубильника, нажатие пусковой кнопки S2 приводит к присоединению катушки линейного контактора K1 к источнику питания и включению главными замыкающими контактами K1. Схема обеспечивает прямой пуск и реверс двигателя, а также торможение противовключением при ручном неавтоматическом управлении.
При снижении температуры до установленной ДОТ размыкается и компрессор выключается. Схема последовательного включения двигателей Пример 5.
Реостатный пуск асинхронного двигателя с кз ротором. Точка П является точкой трогания. Один асинхронный низковольтный электродвигатель, предназначенный для привода компрессора.
Защита двигателя при реверсивном управлении такая же, как и при нереверсивном. При реверсировании двигателя на ходу вначале происходит торможение от данной скорости до нулевой, а затем разгон в другом направлении.
В случае необходимости только торможения двигателя при достижении им нулевой частоты вращения должна быть вновь нажата кнопка SВЗ, что приведет к отключению двигателя от сети и возвращению схемы в исходное положение. Средства для ингаляционного наркоза : Наркоз наступает в результате вдыхания ингаляции средств, которое осуществляют или с помощью маски Достаточно подать на статор двигателя трехфазное напряжение и двигатель сразу запускается. Частоту вращения асинхронного двигателя можно регулировать изменением частоты тока питающей сети, числа пар полюсов статорной обмотки, введением в цепь ротора сопротивления, вызывающего увеличение скольжения. Схемы управления магнитным пускателем
Электропривод – переменного или постоянного тока?
Ежегодный темп роста продаж регулируемых электроприводов составляет, примерно, 6 %, в то время как темп роста приводов переменного тока — 8 %, а объем рынка приводов постоянного тока остается более или менее стабильным. Данная статья предназначена для конечных пользователей, OEM-производителей, системных интеграторов и прочих инженерно-технических работников, использующих приводную технику, чтобы в общих чертах обрисовать преимущества выбора для различных прикладных задач одного из двух основных типов регулируемого электропривода – постоянного или переменного тока.
Какое приводное решение выбрать — DC или AC?
Силовые статические преобразователи
на базе микропроцессоров, применяемые как в приводах переменного, так и постоянного тока, в настоящее время достигли очень высокого технического уровня, который (в допустимых технологических пределах) в большинстве приложений позволяет использовать
электропривод переменного тока
, там где раньше применялся
привод постоянного тока
. Однако, традиционный привод постоянного тока (1-но и 4-х квадрантный) продолжает играть важную роль, особенно в тех приложениях, где нужно обеспечить высокодинамичные режимы с постоянным моментом вращения, жесткими требованиями по перегрузочной способности в широком диапазоне скоростей и рекуперацию энергии обратно в сеть.
Главные критерии выбора
Первое, что должен сделать пользователь, это объективно оценить варианты, предлагаемые на рынке регулируемых приводов, технически соответствующие требованиям прикладной задачи/процесса. Главными критериями этой оценки должны быть: 1. Совокупная стоимость закупки регулируемого привода и требуемого дополнительного оборудования 2. Текущие эксплуатационные расходы:
- обслуживание;
- производственные издержки, КПД, и т.д;
- требуемая площадь размещения.
3. Технологические и инновационные аспекты:
- динамический отклик, время разгона; 4-х квадрантные операции; аварийный стоп, и т.д.
- массо-габаритные характеристики.
4. Эксплуатационная надежность, пригодность приводов:
- соответствие международным требованиям и стандартам IEC, ГОСТ Р, EN, CE-EMC; CSA, UL, и т.д.;
- условия окружающей среды; степень защиты корпуса; ремонт «по-месту»
5. Воздействие на внешнюю среду:
- искажение сетевого напряжения
- ЭМС
6. Требуемое пространство для преобразователя и двигателя 7. Отвод тепла
Сравнение основных характеристик приводов постоянного и переменного тока в промышленном применении
Сравнение проводится между 6-пульсными 3-фазными тиристорными приводами постоянного тока с независимым возбуждением [далее называемыми ППТ
] и 3-фазными электроприводами переменного тока на базе преобразователя частоты с широтно-импульсной модуляцией и асинхронного двигателя [далее называемыми
ЧРП
– частотно регулируемый привод], в следующих типовых категориях: ППТ — P = 11 kW … 5200 kW; U = 200 V … 1190 V ЧРП — P = 0.75 kW … 2000 kW; U = 380 V … 690 V
Привод постоянного тока
Частотно-регулируемый привод
В первом приближении существенных отличий между этими приводами не так и много; однако, при более детальном рассмотрении, выявляются характерные особенности приводов и различие физических принципов функционирования. Дале в статье раскрываются аспекты отличия приводов по следующим пунктам:
- характеристики двигателей, как электромеханических преобразователей
- характеристики преобразователей электрической энергии
- 4-х квадрантные приводы
- влияние на внешнюю среду
- модернизация приводов постоянного тока
Различия между двигателями постоянного и переменного тока
Большинство пользователей имеют такое общее представление об электродвигателях: «Двигатели постоянного тока
сложные, требующие частого обслуживания, что делает их эксплуатацию дорогой; к тому же они имеют низкую степень защиты. Двигатели переменного тока (асинхронные двигатели) просты и надежны, не нуждаются в обслуживании, имеют более низкую цену, и кроме того более высокую степень защиты». Такая классификация может быть верной для многих простых применений; те не менее этот общий вердикт желательно подвергнуть более тщательному рассмотрению!
Механическая характеристика приводов постоянного тока
Обычно используемая независимая вентиляция (прим. в 85 % регулируемых приводов до 250 kW) гарантирует хороший отвод тепла от ротора двигателя постоянного тока во всем диапазоне скоростей.
Типичные применения, требующие обеспечение постоянного момента в широком диапазоне скоростей: волочильные станы, поршневые компрессоры, подъемные механизмы, канатные дороги, экструдеры, …
Механическая характеристика частотно-регулируемых приводов
Обычно используемая самовентиляция (прим. в 90 % регулируемых приводов до 250 kW) в стандартных асинхронных двигателях не является эффективной во всем диапазоне скоростей. На низких скоростях отвод тепла фактически не возможен.
Типичные применения с пониженным моментом на низкой скорости, соответствующие характеристике на рис. 4: насосы, вентиляторы, и др. с квадратичной зависимостью нагрузки от скорости …
Характеристики отношения мощности и скорости в режиме S1 двигателей постоянного и переменного тока:
(1) В отличии от стандартного асинхронного двигателя с фиксированной базовой (номинальной) частотой вращения (синхронные скорости 3000/1500/1000/… об/мин на 50 Гц), двигатель постоянного тока может быть спроектирован с базовой частота вращения в диапазоне примерно от 300 до 4000 об/мин для каждой рабочей точки. (2) В зависимости от типоразмера двигатели постоянного тока (как скомпенсированные, так и не скомпенсированные) могут иметь область работы с ослаблением поля 1 : 3 или 1 : 5 . (3) Ограничение мощности связано с максимальным моментом асинхронного двигателя, уменьшающимся обратно квадрату скорости (1/n2). (4) Ограничение мощности связано с уменьшением коммутационной способности коллекторного двигателя постоянного тока
.
Сравнение рабочих характеристик двигателей показывает, что двигатель постоянного тока выгоднее асинхронного при продолжительной работе на низких скоростях и для широкого диапазона скоростей при постоянной мощности. Перегрузочная способность в кратковременном режиме зависит не только от параметров двигателя, но в большой степени от характеристик преобразователя частоты / тиристорного преобразователя. Чем шире диапазон скоростей, в котором двигатель может выдать максимальную мощность, тем он лучше может быть адаптирован к процессам, требующим обеспечения постоянного момента во всем диапазоне скоростей. Типичное применение: намоточные устройства.
• Типоразмеры, моменты инерции и время разгона:
Основные технические различия двигателей
постоянного и переменного тока
, методы формирования магнитного потока и рассеивание потерь мощности также обуславливают различные размеры (высоту оси вращения вала H) и момент инерции ротора (Jrotor), при одном и том же номинальном моменте вращения двигателя. Двигатели
постоянного тока
имеют значительно меньшую высоту оси вращения
H
и массу ротора, чем асинхронные двигатели, и следовательно обладаю более низким моментом инерции ротора Jrotor, что является существенным преимуществом в высокодинамичных применениях, таких как испытательные стенды, летучие ножницы, и реверсивные приводы, так как это влияет на время разгона и динамический отклик двигателя в 4-х квадрантных приложениях (в двигательных и тормозных режимах).
• Широкий диапазон скоростей при постоянной мощности (работа с ослаблением поля или диапазон регулировки возбуждения):
Для специализированных приводных приложений, как привод намотчика и размотчика, испытательный стенд, лебедка и т.д., требуется очень широкий диапазон скоростей при постоянной мощности. В этом случае, традиционный режим работы с ослаблением поля двигателя постоянного тока с
независимым возбуждением
является особенно экономически эффективным. Это означает: широкий диапазон скоростей, при котором двигатель может выдавать максимальную мощность (длина горизонтальной линии характеристики на рис.5 от nG до n1), требуется меньший запас по мощности двигателя Pmax(motor) / Pmax(load).
• Обслуживание двигателя:
В настоящее время, в зависимости от сложности приложения, ресурс щеток
двигателя постоянного тока
составляет, примерно, 7000 … 12000 часов, благодаря современному коллекторному узлу, углеродистым щеткам и оптимизированному полю возбуждения. В зависимости от механических условий эксплуатации, интервал замены смазки в двигателях постоянного/переменного тока может быть соизмерим, а зачастую и меньше, чем ресурс щеток коллекторного двигателя.
• Степень защиты двигателя:
Исторически сложилось так, что начиная с 20-х годов,
двигатели постоянного тока
разрабатывались в основном для регулируемых приводов, что обусловило применение в них внутренней форсированной независимой вентиляции (прим. в 85 % двигателей до 250 kW). Стандартные асинхронные двигатели активно начали применяться в 70-х/80-х годах и в большинстве своем (прим. 90 % до 250 kW) производились с поверхностной самовентиляцией, так как частотно-регулируемые приводы тогда не были широко распространены. Фактически все асинхронные двигатели мощностью, прим. до 1400 kW имеют степень защиты IP 54, как стандарт, благодаря их простой и прочной конструкции. Для эксплуатации в зонах с повышенной опасностью, практически исключительно используются взрывозащищенные асинхронные двигатели. Асинхронный двигатель отыграл для себя ведущую позицию и доказал свою эффективность в тех секторах промышленности, которые характеризуются агрессивными условиями окружающей среды, высокой степенью загрязненности и запыленности.
• Масса и место для установки двигателя:
Более низкие масса и габариты
двигателей постоянного тока
(стандартная степень защиты
IP 23
) по сравнению с асинхронными двигателями (стандартная степень защиты IP 54) особенно важны для приложений, где двигатель должен перемещаться вместе с грузом (напр., для крупных подъемных, мостовых кранов), или в системах, где важно компактное размещение (буровые установки, подъемники для горнолыжных трасс, морские применения, печатные машины, и т.д.).
Различия между тиристорными преобразователями постоянного тока и преобразователями частоты
• Коммутация и преобразование электрической энергии:
Структурная схема 1-квадрантного привода постоянного тока
Переход тока от одного тиристора к другому начинается с пускового импульса, и после этого продолжается в линейно взаимосвязанном режиме. Это значит, что напряжение между коммутируемыми фазами сети поляризуется таким образом, что ток вновь открываемого тиристора увеличивается, и запирает предшествующий тиристор, снижая его ток до ноля. Коммутация тиристоров производится естественным путем (напряжением сети) при переходе тока через ноль и запирание тиристоров происходит без каких-либо проблем даже при значительной перегрузке. Поэтому тиристоры могут выбираться не по пиковому току, а по среднедействующему номинальному току нагрузки.
Структурная схема преобразователя частоты
Хотя входной выпрямительный мост преобразователя частоты работает подобно приводу постоянного тока, однако выпрямленный им ток должен быть преобразован обратно в 3-х фазный переменный с помощью инвертора. Так как у постоянного тока нет никаких переходов через ноль, то переключающие элементы (IGBT транзисторы
) должны прерывать полный ток нагрузки. Когда IGBT транзистор закрывается, ток проходит через обратный диод на противоположный полюс напряжения постоянного тока. Переключение происходит без контроля напряжения, но оно возможно в любое время независимо от формы сетевого напряжения.
Результат:
Коммутация в преобразователях частоты происходит с большой частотой и в выходном напряжении появляется высокочастотная составляющая, и могут возникнуть проблемы с электромагнитной совместимостью. В преобразователях постоянного тока есть только один контур преобразования энергии (AC → DC). В преобразователях частоты два контура преобразования энергии (AC → DC и DC → AC), т.е. потери мощности удваиваются по сравнению с приводами постоянного тока. Потери мощности, полученные эмпирическим путем следующие: ППТ — 0.8 % … 1.5 % от номинальной мощности; ЧРП — 2 % … 3.5 % от номинальной мощности. Место, требуемое для размещения шкафа преобразователя мощностью от 100 kW: ППТ — 100 %, ЧРП — 130 % … 300 %. Это преимущество приводов постоянного тока обуславливает уменьшение размера и стоимости электрошкафа и системы охлаждения.
• Выходные токи преобразователей переменного и постоянного тока; шум двигателя; нагрузка на изоляцию обмоток, электромагнитная совместимость (ЭМС):
ППТ
• Ток двигателя / шум: Напряжение, подаваемое на двигатель, состоит из сегментов от синусоидального сетевого напряжения. Ток двигателя является постоянным с наложенной переменной составляющей от мостового выпрямителя, поэтому проблем излучения шума в приводе постоянного тока не стоит.
• Пульсации момента вращения двигателя: Пульсирующий момент (foscill = 6 x fline = 300 Гц или 360 Гц), появляющийся в результате пульсаций тока, накладывается на основной момент и по частоте значительно превышает механические резонансные частоты. По этой причине не будет никаких проблем для таких приложений, как намотчики/размотчики и др.
• Напряжение на двигателе/изоляция обмоток: Максимальное напряжение, которое подается на клеммы двигателя постоянного тока эквивалентно пиковому значению сетевого напряжения (UN • √2 ).
• ЭМС: По упомянутым выше причинам инсталляционные затраты, требуемые для уменьшения электромагнитной эмиссии (для обеспечения требований по ЭМС) являются сравнительно небольшими в приводах постоянного тока.
ЧРП
• Ток двигателя / шум: Излучение шума в частотно-регулируемых приводах сильно зависит от выбранной тактовой частоты в каждом конкретном случае.
• Относительные гармонические составляющие в моменте вращения двигателя: Пульсирующий вращающий момент, в результате гармонических составляющих тока и напряжения (отклонение от идеального синуса) по амплитуде и частоте очень зависит от рабочей точки и принципа функционирования преобразователя частоты. Вероятность индуцированных колебаний в приводной системе (двигатель, муфта сцепления, трансмиссия, механические компоненты, и т.д.) соответственно больше.
• Напряжение на двигателе/изоляция обмоток: Выходной сигнал инвертора с ШИМ на IGBT транзисторах содержит крутые фронты напряжения, которые в случае длинного моторного кабеля (> 10 м) могут привести к 2-кратным пиковым перенапряжениям на двигателе. В результате этого увеличивается воздействие на изоляцию обмоток двигателя, что может привести к её старению и пробою. Эту ситуацию можно исправить, применив двигатель с повышенным классом изоляции, или поставив на выходе преобразователя частоты, дроссель.
• ЭМС: Электромагнитная эмиссия в частотно-регулируемых приводах, особенно связанная с длинным кабелем, может потребовать применение дополнительных мер и оборудования.
• Влияние на напряжение сети:
Линейные токи приводов постоянного тока с
6-пульсным тиристорным мостом
будут всегда содержать кроме основной гармоники еще 5-ю, 7-ю, 11-ю и 13-ю гармоники в соответственном процентном отношении: 22 %, 14 %, 9 %, 7.6 %. В случае работы нескольких приводов постоянного тока, подключенных у одному источнику сетевого напряжения, они немного уравновесят друг друга за счет различной фазовой последовательности, и общее искажение сетевого напряжения будет снижено. В преобразователях частоты переключение
IGBT транзисторов
практически не создает
низкочастотных
гармонических искажений, но существенными являются
высокочастотные
составляющие.
• Реактивная мощность:
Оба типа приводов
(ППТ и ЧПП)
потребляют реактивную мощность из сети. Её размер не значителен в частотно-регулируемых приводах, а в приводах постоянного тока более значителен и зависит от частоты вращения двигателя. Предпочтение в этом вопросе имеют частотные приводы.
Значения, полученные эмпирическим путем для приводов постоянного тока: 1-кварантные приложения — cos ≈ 0…0.9 4-квадрантные приложения — cos ≈ 0…0.85
Значения, полученные эмпирическим путем для частотно-регулируемых приводов: 1-кварантные приложения (с диодным входным мостом) — cos ≈ 0.99 4-квадрантные приложения (с тиристорным входным мостом и рекуперацией в сеть) — cos ≈ 0.9
Модернизация существующих приводов постоянного тока.
Когда возникает вопрос о том, стоит ли модернизировать существующий привод постоянного тока или дешевле его полностью заменить на электропривод переменного тока, надо подойти к этому вопросу взвешенно и рассмотреть все аргументы и «за» и «против».
В основном доступно несколько уровней модернизации:
- Полная замена привода постоянного тока (преобразователя и двигателя) на новый современный привод постоянного тока.
- Замена только преобразователя, если двигатель в хорошем состоянии.
- Замена одного из модулей преобразователя на новый.
- Замена аналоговой управляющей электроники на цифровую без изменения силовой части (рекомендуется только на мощностях более 1 МВт).
- Полная замена всей приводной системы на частотно-регулируемый привод.
Отвечая на вопрос, о том какой подход выбрать в каждом конкретном случае, важно оценить ряд критериев:
- Может ли появиться потребность в изменении привода в будущем (изменяться тип или характер нагрузки, условия эксплуатации, и т.д.)?
- В каком состоянии находятся индивидуальные компоненты системы (надежность, возраст, эксплуатационные затраты)?
- До принятия решения о замене привода постоянного тока на ЧРП
учтите следующие пункты:
- Издержки на прокладку новых кабелей.
- Место для размещения преобразователя частоты.
- Потребуется ли замена коммутационной аппаратуры?
- Возможность и сложность механического монтажа нового двигателя
- Продолжительность всех работ по замене приводов./
Сравнение цен приводных систем постоянного и переменного тока
(преобразователь + двигатель или полный шкаф управления + двигателя) На основании сегодняшних цен на приводы постоянного и переменного тока, с учетом указанных выше преимуществ и недостатков различных решений, можно руководствоваться следующей оценкой: 1-квадрантные приводы < 40…80 кВт → ЧРП менее дорогие 4-квадрантные приводы < 40…60 кВт (Преобразователь частоты + тормозной (модуль) резистор); → ППТ менее дорогие Рекуперативные 4-квадрантные приводы > 15 kW → ППТ менее дорогие
Заключение
Основным недостатком аналогового привода постоянного тока
является низкая помехоустойчивость, сложность в настройке и нестабильность параметров. В качестве датчика обратной связи по скорости применяется тахогенератор, имеющий те же недостатки, что и коллекторный двигатель. Для реверсивных приводов после тахогенератора приходится устанавливать диодный мост, что ограничивает диапазон регулирования на малых скоростях из-за пропадания обратной связи. В случае синхронизации механизмов с различными приводами в режиме «ведущий – ведомый» частотный преобразователь намного предпочтительней, т.к. в качестве датчика скорости применяются цифровые датчики типа энкодера, резольвера или sin/cos преобразователи, что позволяет строить системы с электрическими валами. Наличие дополнительных устройств (опций) частотных преобразователей позволяют наращивать функции последних: увеличивать число входов выходов, использовать современные шины и протоколы обмена, применять привод в устройствах позиционирования, следить за температурным режимом двигателя и привода, использовать привод в режиме виртуального кулачка (переменная скорость вращения за один оборот вала) и многое другое.
Современные микроконтроллеры, управляющие частотным преобразователем, позволяют обрабатывать данные за период в несколько десятков микросекунд, (десять лет назад это время составляло 200 мС), что позволило расширить диапазон регулирования с обратной связью до 1:1000 с точностью поддержания скорости 0,2 оборота во всем диапазоне, что приближает частотные приводы к сервоприводам.
Однако, учитывая устойчивый рост рынка регулируемых приводов, ожидается, что объем рынка приводов постоянного тока останется более или менее устойчивым в течение некоторого периода. Это представление подтверждено последними исследованиями рынка.
Сравнение двух типов приводных систем, сделанное в данном обзоре, показывает, что вопрос о том, является ли правильным выбор привода постоянного или переменного тока, целиком зависит от конкретного применения.
- Должен быть обеспечен режим работы в 4-х квадрантах с рекуперацией?
- Предполагается продолжительная работа на низкой скорости?
- Требуется меньшее выделение тепла преобразователем?
- Предполагаются частые динамичные разгоны и торможения?
- Требуется широкий диапазон скоростей при постоянной мощности (>1:1.5)?
- Устраивает степень защиты двигателя < IP54
? Работа в незагрязненной среде? - Есть возможность обеспечения периодического обслуживания двигателя?
- Требуются компактные размеры и небольшая масса преобразователя и двигателя?
Чем на большее количество вопросов Вы ответили «Да»
, тем актуальнее для Вас использование привода постоянного тока!
| Применение частотных преобразователей Optidrive E2 в Modbus сетях | Электропривод – переменного или постоянного тока? | Выбор и применение частотно-регулируемого электропривода мощностью до 500 кВт на производственных объектах газовой промышленности. |
Нереверсивная схема управления асинхронного двигателя.
В случае, если одна из электрифицированных задвижек окажется неисправной, промежуточное реле PIT разрывает цепи автоматического управления насосными агрегатами гидроэлеваторов. Такой пускатель состоит из двух простых пускателей, подвижные части которых между собой связаны механически с помощью устройства в виде коромысла. При включённом трёхполюсном, выключателе Q1, выполненном в виде рубильника, нажатие пусковой кнопки S2 приводит к присоединению катушки линейного контактора K1 к источнику питания и включению главными замыкающими контактами K1. Одной из преимуществ использования асинхронных двигателей с короткозамкнутым ротором является простота их включения в сеть. Простейшая схема управления электродвигателем может иметь только неавтоматический выключательQи предохранителиF или автоматический выключатель.
Схема обеспечивает прямой пуск и реверс двигателя, а также торможение противовключением при ручном неавтоматическом управлении. В приводах, где применяются двигатели с короткозамкнутым ротором, частоту вращения электродвигателя изменяют путем изменения числа пар полюсов. Мощность электродвигателя 29,5 кВт, пуск автоматизирован.
По истечении некоторого времени контакты К размыкаются и замыкаются контакты КУ. Начинается разгон через ограничивающие резисторы R1—R4.
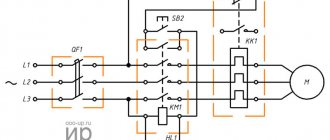
Основным элементом этой схемы является реверсивный магнитный пускатель, который включает в себя два линейных контактора КМ1 и КМ2 и два тепловых реле защиты КК рис. Наиболее часто в качестве привода в станках и установках применяются трехфазные асинхронные двигатели с короткозамкнутым ротором.
Типовые схемы управления электроприводами с асинхронными двигателями
Это приводит к включению контактора КМ2 и подаче на АД напряжения источника питания с другим порядком чередования фаз. Происходит разбег двигателя по его естественной характеристике. Он срабатывает и своими главными контактами К подключает двигатель на трехфазное питание Л1, Л2, Л3. Принципиальная схема силовой части нереверсивного электропривода по системе ТП-Д Рис.
Электрические блокировки для предотвращения одновременного включения двух контакторов осуществляются с помощью размыкающих контактов КM1 и КM2 рисунок 6, б. В результате блокировочными связями световая сигнализация обеспечивает контроль над направлением вращения двигателя при реверсе. Одновременно контактор своим замыкающим вспомогательным контактом осуществляет самоблокировку, а размыканием другого вспомогательного контакта отключает катушки. При этом срабатывает контактор малой скорости, который обеспечивает главными замыкающими контактами K1. Нажатие остановочной кнопки S1 размыкает цепь катушки линейного контактора K1 и его главные контакты K1.
Так как привод конвейеров производится электродвигателями, то более подходящими для данного случая будут электрические или механические ЛЭ. После разбега двигателя до низкой частоты вращения может быть осуществлен его разгон до высокой частоты вращения. Включение КМ1 одновременно приводит к срабатыванию контактора КМ4, который своим контактом шунтирует ненужный при пуске резистор противовключения Rд2, а также разрывает цепь катушки реле времени КТ. При использовании автотрансформаторов см. При этом речь может идти о потоках энергии различного вида: электрической, механической, тепловой и других. Как подключить магнитный пускатель. Схема подключения.
Классификация электроприводов
В настоящее время существует огромное количество разновидностей электроприводов. Их можно в первом преближении разделить на группы по следующим основным признакам.
Классификация электроприводов по характеру движения:
- поступательного и вращательного движения;
- регулируемые и нерегулируемые;
- непрерывного и дискретного действия;
- однонаправленные и двунаправленные (реверсивные);
- вибрационные (реализующие возвратно-поступательное движение).
Классификация электроприводов по числу используемых электродвигателей:
- групповые электроприводы;
- индивидуальные;
- взаимосвязанные электроприводы.
Групповой электропривод содержит один электродвигатель, приводящий в движение несколько исполнительных механизмов одной рабочей машины или один исполнительный механизм нескольких рабочих машин. Индивидуальный электропривод содержит один электродвигатель, приводящий в движение один исполнительный механизм рабочей машины.
Взаимосвязанный электропривод содержит два и более электродвигателей, приводящих в движение один и более исполнительных механизмов. При этом, если электродвигатели связаны между собой механически (работают на 1 вал), то электропривод называют многодвигательным. Если же электродвигатели связаны только электрическими цепями, то электропривод называют электрическим валом.
Классификация электроприводов по виду электрического силового преобразователя:
- управляемые и неуправляемые;
- с выпрямителем или инвертором;
- с преобразованием напряжения или частоты;
- со звеном постоянного или переменного тока , или их совокупностью.
Также весьма разнообразна элементная база силовых преобразователей: электромашинные системы, магнитные усилители, ионные и полупроводниковые элементы. Благодаря вышеотмеченномы рознообразию видов электропривода, он получил широкое применение во всех сферах человеческого общества, начиная от промышленного производства и до бытовых сфер. Этим и определяется исключительно большой диапазон мощностей электроприводов — от долей Вт до десятков МВт. Такие электроприводы применяются в газо- и нефтеперекачивающих станциях, прокатных станах, конвейерах, металлорежущих станках и т.д. В основном, предпочтение в таких случаях отдается индивидуальному автоматизированному электроприводу.
Преобразовательные устройства таких электроприводов выполняются на базе генераторов постоянного тока, полупроводниковых преобразователей напряжения и частоты, позволяя обеспечить широкие возможности регулирования потока электрической энергии, поступающей в электродвигатели.
Управляющие устройства электропривода построены в основном на микроэлектронной базе, а иногда включают в себя и управляющую вычислительную машину. Такая же база применяется в робототехнике, манипуляторах, станках с ЧПУ и т.д..
Наша группа «ВКонтакте»
В многодвигательных приводах или приводах механизмов, связанных общей технологической зависимостью, должна быть обеспечена определенная очередность включения и отключения электродвигателей.
Для включения электродвигателя М должен быть включен выключатель Q.
Происходит разбег двигателя по его естественной характеристике.
Схема нереверсивного управления трёхфазным асинхронным двигателем с короткозамкнутым ротором при торможении противовключением. Этот контактор шунтирует вторую ступень пускового резистора и своим вспомогательным контактом с выдержкой времени включает обмотку третьего контактора, который шунтирует последнюю ступень пускового резистора. Для отключения электродвигателя от сети при его вращении в любом направлении необходимо нажать на кнопочный выключатель SBТ.
В цепи магнитного пускателя включен контакт, принадлежащий контактору, управляющему двигателем. Для остановки двигателя необходимо нажать кнопку SВ1, при этом отключаются пускатель КМ и двигатель М.
Реостатный пуск асинхронного двигателя с кз ротором. Также возможно питание катушки электромагнитного пускателя напряжение В. Современные высокие требования к качеству технологического процесса и производительности различных механизмов могут быть обеспечены только на основании применения автоматизированных электроприводов.
КЛАССИФИКАЦИЯ ЭЛЕКТРИЧЕСКИХ СХЕМ. УСЛОВНЫЕ ОБОЗНАЧЕНИЯ ЭЛЕМЕНТОВ СХЕМ
Управление электродвигателями с фазным ротором. Катушка электромагнит включения магнитного пускателя КМ получает питание от сети и замыкает контакты КМ в главной цепи и в цепи управления. Пуск начинается после перемещения контактной щетки на вывод 1. При вращении двигателя, например вправо, горит лампа HL1, включаемая контактом KM1.
Во многих случаях при управлении электроприводом необходимо изменять направление вращения электродвигателя. После замыкания выключателя управления В получает питание катушка реле Р1. Реверсивная схема подключения магнитного пускателя
Преобразователи частоты электропривода – это новые технологии в управлении оборудованием, осуществляющем преобразование энергии. Раньше это управление строилось на тиристорных выпрямителях, но такое оборудование было сложным и дорогим. Сегодня регуляторы привода переменного тока базируются на таких устройствах, как преобразователи частоты для асинхронных двигателей, одним из которых является блок сигнально-пусковой С2000-СП1.
Преимущества асинхронных двигателей
Асинхронные двигатели просты и надежны в изготовлении и эксплуатации, по сравнению с двигателями постоянного тока они имеют гораздо меньшие размеры. Основным их недостатком является сложность регулирования скорости с использованием традиционных методов – изменения напряжения и введения дополнительного сопротивления. Раньше управление асинхронными двигателями было большой проблемой, несмотря, что теоретически вопрос был решен еще в довоенные годы.
С появлением новых технологий, преобразователи частоты сделали асинхронные двигатели более доступными. Они позволяют достичь значительной экономии за счет регулирования параметров. Например, для конвейера или транспортера с их помощью можно отрегулировать скорость движения, для вентилятора или насоса – подачу давления или производительность. Большой экономический эффект дает их применение при транспортировке жидкостей в качестве альтернативы задвижкам и клапанам. Асинхронные двигатели дают снижение потерь и создают необходимый уровень давления.
Блок сигнально-пусковой С2000-СП1
Блок сигнально-пусковой С2000-СП1 предназначен для контроля состояния оборудования и сбора информации в пожарной и охранной сигнализации, идентификации тревог и постановки на охрану или снятия с нее различных объектов. Он объединяет все подключенные приборы и датчики в одну систему, при го использовании количество подключенных объектов увеличивается. Основная функция блока – управление исполняющими устройствами: сиренами, лампами, электромагнитными замками и системой оповещения. Тревожный сигнал поступает на центральный пульт путем размыкания контактов.
Преобразователи частоты для асинхронных двигателей
Основная функция, которую выполняют преобразователи частоты для асинхронных двигателей – это изменение частоты выходного трехфазного напряжения. Основными их преимуществами являются:
- снижение энергопотребления;
- повышенная безопасность;
- снижение аварийности;
- увеличение ресурса.
Преобразователь частоты в электроприводе дает возможность решить большое количество производственных задач, связанных с металлообрабатывающими станками, кранами, конвейерами, экструдерами, лифтами и т.д. Они просты в монтаже и эксплуатации, экономичны и не требуют особого внимания. Преобразователи частоты используются для основных промышленных механизмов и позволяют перейти на современные энергосберегающие технологии.