Можно ли Диммером регулировать обороты двигателя?
Для регулирования скорости вращения однофазных электродвигателей на напряжение питания 220 В применяются симисторные регуляторы скорости вращения. Диммер (симисторный светорегулятор), в свою очередь, разработан для управления резистивной нагрузкой и должен применяется только как регулятор яркости свечения ламп.
Интересные материалы:
Как сделать большие часы на экране блокировки? Как сделать большие часы на компьютере? Как сделать большое отверстие в толстом металле? Как сделать большую скобку в ворде? Как сделать босса Иссушителя? Как сделать бота админом в беседе? Как сделать браслет на леске? Как сделать браузером по умолчанию? Как сделать будку для немецкой овчарки своими руками? Как сделать буклет для проекта в ворде?
Самостоятельное создание регулятора
Заводские регуляторы представлены в широком ассортименте, как в интернете, так и обыкновенных магазинах. Но, если у вас нет желания приобретать готовый компонент и вы хотите собрать его самостоятельно – это реально осуществить. Чтобы задача была успешной – необходимо следовать алгоритму конструкции и иметь в наличии все необходимые компоненты.
Нам понадобятся:
- проводки;
- готовая схема;
- конденсаторные схемы;
- тиристор;
- резистор;
- паяльник.
Ориентируясь на схему компоновки, мощностной и оборотный регулятор будет отвечать за контроль первого полупериода. Самодельный стабилизатор имеет такой алгоритм работы (пример нашей модели):
- прибор, подключенный к стандартной сети питания на 220в, принимает ток на конденсатор;
- компонент сразу же срабатывает, после получения заряда;
- передача нагрузки к резисторам и нижним кабелям;
- соединение положительного конденсаторного контакта к тиристорному электроду;
- подача одного заряда напряжения на достаточном уровне;
- открытие второго полупроводника;
- конденсатор подает на тиристор нагрузку, он в свою очередь пропускает ее через себя;
- конденсатор разряжается;
- повторение полупериода;
Если мощность двигателя постоянного или переменного тока большая – регулятор обеспечивает экономную работу устройства. Для использования приспособления в своих бытовых, мощности и ресурса хватает. Но, когда нужно осуществлять регулирование оборотов без потери мощности и более крупных и производительных агрегатов, тогда стоит обратить внимание все же на заводские модификации. Несмотря на то, что такой вариант получится дороже, он обеспечит 100%-ю работоспособность и надежность.
А сейчас давайте рассмотрим другие, нестандартные, но довольно распространенные методы регулировки и стабилизации.
Способ 2
Здесь используется микросхема типа TDA 1085 со стандартной платой. Можно при желании создать собственную, «модернизировав» и изменив неподходящие элементы. К примеру, можно применять двухстороннюю печатную плату. Конденсаторные и резисторные детали могут применяться при поверхностном монтаже. Рекомендуется развести друг от друга низко- и высоковольтные цепи. А «земля» должна разводиться с учетом параметров микросхемы.
Пример собранной платы
В результате получается компактная двусторонняя плата, обеспечивающая точное регулирование.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
Достоинства:
- большой диапазон регулирования в сторону понижения скорости вращения.
Недостатки:
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Виды и критерии выбора
Для выбора регулятора нужно руководствоваться определенными характеристиками для конкретного случая. Среди всех критериев можно выбрать следующие:
- По типу управления. Для двигателей коллекторного типа применяются регуляторы с векторной или скалярной системой управления.
- Мощность является основным параметром, от которого нужно отталкиваться.
- По диапазону U.
- По диапазону частот. Нужно выбирать модель, которая соответствует требованиям пользователя для конкретного случая.
- Прочие характеристики, в которые включены гарантия, габариты, комплектация.
Кроме того, регулятор подбирается мощнее, чем сам электродвигатель по формуле: Pрег = 1,3 * Pдвиг (Pрег, Pдвиг — мощность регулятора и двигателя соответственно). Его нужно выбирать на разные диапазоны U, так как универсальность играет важную роль.
Устройство на тиристорах
В этой модели, представленной на схеме 1, применяются 2 тиристора, включенных встречно-параллельно, хотя их можно заменить одним симистором.
Схема 1 — Тиристорная регулировка оборотов коллекторного двигателя без потери мощности.
Эта схема производит регулирование с помощью открытия или закрытия тиристоров (симистора) при фазовом переходе через нейтраль. Для корректного управления коллекторным двигателем применяют следующие способы модификации схемы 1:
- Установка защитных LRC-цепей, состоящих из конденсаторов, резисторов и дросселей.
- Добавление на входе емкости.
- Использование тиристоров или симистора, ток которых превышает номинальное значение силы тока двигателя в диапазоне от 3..8 раз.
Этот тип регуляторов имеет достоинства и недостатки. К первым относятся низкая стоимость, маленький вес и габариты. Ко вторым следует отнести следующие:
- применение для моторов небольшой мощности;
- происходит шум и рывки мотора;
- при использовании схемы на симисторах происходит попадание постоянного U на двигатель.
Этот тип регулятора ставится в вентиляторы, кондиционеры, стиральные машины и электродрели . Отлично выполняет свои функции, несмотря на недостатки.
Транзисторный тип
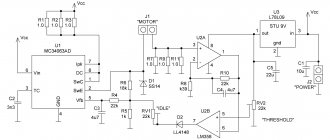
Еще одним названием регулятора транзисторного типа является автотрансформатор или ШИМ-регулятор (схема 2). Он изменяет номинал U по принципу широтно-импульсной модуляции (ШИМ) при помощи выходного каскада, в котором применяются транзисторы типа IGBT.
Схема 2 — Транзисторный ШИМ-регулятор оборотов.
Коммутация транзисторов происходит с высокой частотой и благодаря этому можно изменить ширину импульсов. Следовательно, при этом изменится и значение U. Чем длиннее импульс и короче паузы, тем выше значение U и наоборот. Положительные аспекты применения этой разновидности следующие:
- Незначительный вес прибора при низких габаритах.
- Довольно низкая стоимость.
- При низких оборотах отсутствие шума.
- Управление за счет низких значений U (0..12 В).
Основной недостаток применения заключается в том, что расстояние до электромотора должно быть не более 4 метров.
Регулирование за счет частоты
Регулирование оборотов моторов различных типов за счет частоты получило широкое применение. Частотное преобразование занимает лидирующую позицию на рынке сбыта устройств-регуляторов оборотов и осуществления плавного пуска. Благодаря своей универсальности возможно влиять на мощность, производительность и скорость любого устройства с электродвигателем. Эти устройства применяются для однофазных и трехфазных двигателей. Применяются такие виды частотных преобразователей:
- Специализированные однофазные.
- Трехфазные без конденсатора.
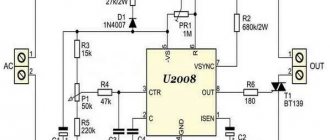
Для регулирования оборотов используется конденсатор, включенный с обмотками однофазного двигателя (схема 3). Этот преобразователь частоты (ПЧ) имеет емкостное R, которое зависит от частоты протекающего переменного тока. Выходной каскад такого ПЧ выполнен на IGBT-транзисторах.
Схема 3 — Частотный регулятор оборотов.
У специализированного ПЧ есть свои преимущества и недостатки. Преимуществами являются следующие:
- Управление АД без участия человека.
- Стабильность.
- Дополнительные возможности.
Существует возможность управлять работой электромотора при определенных условиях, а также защита от перегрузок и токов КЗ. Кроме того, возможно расширять функционал при помощи подключения цифровых датчиков, мониторинга параметров работы и использования PID-регулятора. К минусам можно отнести ограничения при управлении частотой и довольно высокую стоимость.
Для трехфазных АД применяются также устройства регулирования частоты (схема 4). Регулятор имеет на выходе три фазы для подключения электромотора.
Схема 4 — ПЧ для трехфазного двигателя.
У этого варианта тоже есть свои сильные и слабые стороны. К первым можно отнести следующие: низкую стоимость, выбор мощности, широкий диапазон частотной регуляции, а также все преимущества однофазных преобразователей частоты. Среди всех отрицательных сторон можно выделить основные: предварительный подбор и нагрев при пуске.
Как определить мощность электродвигателя?
Проще всего определить номинальную мощность электродвигателя по шильдику. На нем указана механическая мощность (мощность на валу), значение которой всегда меньше потребляемой мощности за счет потерь на трение и нагрев. Однако, если шильдик на корпусе двигателя отсутствует, можно очень приблизительно оценить характеристики привода по его габаритам. При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов.
Также мощность можно определить по нагрузке и по настройкам защитных устройств, через которые питается двигатель (мотор-автомат, тепловое реле).
Еще один способ – включаем двигатель на номинальную мощность, обеспечив нужную нагрузку на валу. После этого измеряем токоизмерительными клещами ток, который должен быть одинаков по всем обмоткам. Для приблизительной оценки мощности асинхронного двигателя, подключенного по схеме «звезда», нужно разделить номинальный измеренный ток на 2.