Публикую первую главу лекций по теории автоматического управления, после которых ваша жизнь уже никогда не будет прежней.
Лекции по курсу «Управление Техническими Системами», читает Козлов Олег Степанович на кафедре «Ядерные реакторы и энергетические установки», факультета «Энергомашиностроения» МГТУ им. Н.Э. Баумана. За что ему огромная благодарность.
Данные лекции только готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика привествуется.
1.1. Цели, принципы управления, виды систем управления, основные определения, примеры
Развитие и совершенствование промышленного производства (энергетики, транспорта, машиностроения, космической техники и т.д.) требует непрерывного увеличения производительности машин и агрегатов, повышения качества продукции, снижения себестоимости и, особенно в атомной энергетике, резкого повышения безопасности (ядерной, радиационной и т.д.) эксплуатации АЭС и ядерных установок.
Реализация поставленных целей невозможна без внедрения современных систем управления, включая как автоматизированные (с участием человека-оператора), так и автоматические (без участия человека-оператора) системы управления (СУ).
Определение:
Управление – это такая организация того или иного технологического процесса, которая обеспечивает достижение поставленной цели.
Теория управления
является разделом современной науки и техники. Она базируется (основывается) как на фундаментальных (общенаучных) дисциплинах (например, математика, физика, химия и т.д.), так и на прикладных дисциплинах (электроника, микропроцессорная техника, программирование и т.д.).
Любой процесс управления (автоматического) состоит из следующих основных этапов (элементов):
- получение информации о задаче управления;
- получение информации о результате управления;
- анализ получаемой информации;
- выполнение решения (воздействие на объект управления).
Для реализации Процесса Управления система управления (СУ) должна иметь:
- источники информации о задаче управления;
- источники информации о результатах управления (различные датчики, измерительные устройства, детекторы и т.д.);
- устройства для анализа получаемой информации и выработки решения;
- исполнительные устройства, воздействующие на Объект Управления, содержащие: регулятор, двигатели, усилительно-преобразующие устройства и т.д.
Определение:
Если система управления (СУ) содержит все перечисленные выше части, то она является замкнутой.
Определение:
Управление техническим объектом с использованием информации о результатах управления называется принципом обратной связи.
Схематично такая система управления может быть представлена в виде:
Рис. 1.1.1 — Структура системы управления (СУ)
Если система управления (СУ) имеет структурную схему, вид которой соответствует рис. 1.1.1, и функционирует (работает) без участия человека (оператора), то она называется системой автоматического управления (САУ).
Если СУ функционирует с участием человека (оператора), то она называется автоматизированной СУ.
Если Управление обеспечивает заданный закон изменения объекта во времени независимо от результатов управления, то такое управление совершается по разомкнутому циклу, а само управление называется программным управлением.
К системам, работающим по разомкнутому циклу, относятся промышленные автоматы (конвейерные линии, роторные линии и т.д.), станки с числовым программным управлением (ЧПУ): см. пример на рис. 1.1.2.
Рис.1.1.2 — Пример программного управления
Задающее устройство может быть, например, и “копиром”.
Поскольку в данном примере нет датчиков (измерителей), контролирующих изготавливаемую деталь, то если, например, резец был установлен неправильно или сломался, то поставленная цель (изготовление детали) не может быть достигнута (реализована). Обычно в системах подобного типа необходим выходной контроль, который будет только фиксировать отклонение размеров и формы детали от желаемой.
Автоматические системы управления подразделяются на 3 типа:
- системы автоматического управления (САУ);
- системы автоматического регулирования (САР);
- следящие системы (СС).
САР и СС являются подмножествами САУ ==> .
Определение: Автоматическая система управления, обеспечивающая постоянство какой-либо физической величины (группы величин) в объекте управления называется системой автоматического регулирования (САР).
Системы автоматического регулирования (САР) — наиболее распространенный тип систем автоматического управления.
Первый в мире автоматический регулятор (18-е столетие) – регулятор Уатта. Данная схема (см. рис. 1.1.3) реализована Уаттом в Англии для поддержания постоянной скорости вращения колеса паровой машины и, соответственно, для поддержания постоянства скорости вращения (движения) шкива (ремня) трансмиссии.
В данной схеме чувствительными элементами
(измерительными датчиками) являются “грузы” (сферы). «Грузы» (сферы) также “заставляют” перемещаться коромысло и затем задвижку. Поэтому данную систему можно отнести к системе прямого регулирования, а регулятор — к регулятору прямого действия, так как он одновременно выполняет функции и “измерителя” и “регулятора”.
В регуляторах прямого действия дополнительного источника
энергии для перемещения регулирующего органа не требуется.
Рис. 1.1.3 — Схема автоматического регулятора Уатта
В системах непрямого регулирования необходимо присутствие (наличие) усилителя (например, мощности), дополнительного исполнительного механизма, содержащего, например, электродвигатель, серводвигатель, гидропривод и т.д.
Примером САУ (системы автоматического управления), в полном смысле этого определения, может служить система управления, обеспечивающая вывод ракеты на орбиту, где управляемой величиной может быть, например, угол между осью ракеты и нормалью к Земле ==> см. рис. 1.1.4.а и рис. 1.1.4.б
| Рис. 1.1.4 (а) | Рис. 1.1.4 (б) |
Адаптивные системы
Если вы заинтересовались тем, как управлять САУ адаптивного типа, то для начала следует понять, что здесь есть три подкласса:
- экстремальный;
- самонастройка параметров;
- самонастройка структуры.
Экстремальное регулирование – это стабилизирующая система, следящая или имеющая программное управление. При этом используется настройка (закон или программа), которая способна измениться под воздействием разных факторов и возмущений. В результате программа позволяет системе автоматически выйти на наилучший режим работы.
Сама же система отличается наличием специального устройства автоматического поиска, которое может анализировать некоторые характеристики объекта. По этому анализу и подается нужный сигнал, что позволяет получить нужное значение, имеющее экстремальную величину.
Система с самонастройкой своих параметров может изменить ряд параметров управления, для повышения стабильности работы всей системы. Естественно, чтобы обеспечить такой результат используется определенная программа расчетов.
Самонастройка структуры дает возможность переключать элементы в схеме соединения. Или даже ввести ряд новых элементов. В результате задача будет решена наилучшим образом.
Функциональная классификация
Тут есть всего 4 класса систем управления:
- Координирование работы механизмов;
- Регулировка параметров технологических процессов;
- Автоматический контроль;
- Автоматическая защита и блокировка.
Вывод
Такие системы используются, чтобы максимально автоматизировать самые разные процессы на производстве. Но кроме того они необходимы и для работы сложных механизмов. Если у вас возникли вопросы (например, как работает сигнализатор уровня САУ М6 или что-то похожее), то обращайтесь исключительно к специалистам. Только они смогут более подробно объяснить, как работает та или иная система, и какую из них лучше использовать в каждом конкретном случае.
Кстати, если вы собираетесь заказать монтаж таких систем, то лучшим вариантом станет выбор ООО ГОРИНКОМ. Обратитесь туда и все ваши проблемы будут решены.
1.2. Структура систем управления: простые и многомерные системы
В теории управления техническими системами часто бывает удобно систему разделить на набор звеньев, соединенных в сетевые структуры. В простейшем случае система содержит одно звено, на вход которого подается входной воздействие (вход), на входе получается отклик системы (выход).
В теории Управления Техническими Системам используют 2 основных способа представления звеньев систем управления:
— в переменных “вход-выход”;
— в переменных состояния (более подробно см. разделы 6…7).
Представление в переменных “вход-выход” обычно используется для описания относительно простых систем, имеющих один “вход” (одно управляющее воздействие) и один “выход” (одна регулируемая величина, см. рисунок 1.2.1).
Рис. 1.2.1 – Схематическое представление простой системы управления
Обычно такое описание используется для технически несложных САУ (систем автоматического управления).
В последнее время широкое распространение имеет представление в переменных состояния, особенно для технически сложных систем, в том числе и для многомерных САУ. На рис. 1.2.2 приведено схематичное представление многомерной системы автоматического управления, где u1(t)…um(t)
— управляющие воздействия (вектор управления),
y1(t)…yp(t)
— регулируемые параметры САУ (вектор выхода).
Рис. 1.2.2 — Схематическое представление многомерной системы управленияя
Рассмотрим более детально структуру САУ, представленную в переменных “вход-выход” и имеющую один вход (входное или задающее, или управляющее воздействие) и один выход (выходное воздействие или управляемая (или регулируемая) переменная).
Предположим, что структурная схема такой САУ состоит из некоторого числа элементов (звеньев). Группируя звенья по функциональному принципу (что звенья делают), структурную схему САУ можно привести к следующему типовому виду:
Рис. 1.2.3 — Структурная схема системы автоматического управления
Символом ε(t)
или переменной
ε(t)
обозначается рассогласование (ошибка) на выходе сравнивающего устройства, которое может “работать” в режиме как простых сравнительных арифметических операций (чаще всего вычитание, реже сложение), так и более сложных сравнительных операций (процедур).
Так как y1(t) = y(t)*k1
, где
k1
— коэффициент усиления, то ==>
ε(t) = x(t) — y1(t) = x(t) — k1*y(t)
Задача системы управления состоит в том (если она устойчива), чтобы “работать” на уничтожение рассогласования (ошибки) ε(t)
, т.е. ==>
ε(t) → 0
.
Следует отметить, что на систему управления действуют как внешние воздействия (управляющее, возмущающее, помехи), так и внутренние помехи. Помеха отличается от воздействия стохастичностью (случайностью) своего существования, тогда как воздействие почти всегда детерминировано.
Для обозначения управляющего (задающего воздействие) будем использовать либо x(t)
, либо
u(t)
.
Классификация
В промышленном производстве выделяют следующие классы автоматических и автоматизированных систем управления.
- Децентрализованная. Необходима в структурах, где автоматизируются независимые объекты.
- Централизованная. Подходит для единого органа управления. Среди ее достоинств – это взаимодействие информации, вероятность изменить вводные данные, большая эксплуатационная эффективность. К недостаткам относят высокая потребность безопасности и продуктивности, большая протяженность каналов связи при рассредоточении объектов.
- Центральная рассредоточенная. Она сохраняет способность централизованного управления. Ее преимущества – это уменьшение запросов к проверке и менеджменту без снижения качества. Минусы системы управления: сложные информационных процессов, избыточность техники и сложность синхронизации.
- Иерархическая структура. Применяется для холдингов, где автоматические и автоматизированные системы управления не могут работать на одном уровне. По мере увеличения количества информации создается иерархия задач.
Автоматические и автоматизированные системы управления подчиняются единому стандарту. Любой сотрудник, имеющий полномочия, может работать с базой. С помощью автоматических и автоматизированных систем управления контролируют уровень работы персонала и другие показатели.
1.3. Основные законы управления
Если вернуться к последнему рисунку (структурная схема САУ на рис. 1.2.3), то необходимо “расшифровать” роль, которую играет усилительно-преобразующее устройство (какие функции оно выполняет).
Если усилительно-преобразующее устройство (УПУ) выполняет только усиление (или ослабление) сигнала рассогласования ε(t), а именно: , где – коэффициент пропорциональности (в частном случае = Const), то такой режим управления замкнутой САУ называется режимом пропорционального управления (П-управление).
Если УПУ выполняет формирование выходного сигнала ε1(t), пропорционального ошибке ε(t) и интегралу от ε(t), т.е. , то такой режим управления называется пропорционально-интегрирующим (ПИ-управление). ==> , где b
– коэффициент пропорциональности (в частном случае
b = Const
).
Обычно ПИ-управление используется для повышения точности управления (регулирования).
Если УПУ формирует выходной сигнал ε1(t), пропорциональный ошибке ε(t) и ее производной, то такой режим называется пропорционально-дифференцирующим (ПД-управление): ==>
Обычно использование ПД-управления повышает быстродействие САУ
Если УПУ формирует выходной сигнал ε1(t), пропорциональный ошибке ε(t), ее производной, и интегралу от ошибки ==> , то такой режим называетсято такой режим управления называется пропорционально-интегрально-дифференцирующим режимом управления (ПИД-управление).
ПИД-управление позволяет зачастую обеспечить “хорошую” точность управления при “хорошем” быстродействии
Историческая справка
Одной из главных функций А. у. является автоматизация производства, которая увеличивает производительность труда, позволяет при сохранении требуемого качества увеличить объёмы производства товарной продукции. Задача оперативного управления технологическими процессами и объектами в реальном времени возникла одновременно с появлением товарного производства. Первоначально эту задачу решал человек, который приблизительно оценивал ход технологического, производственного процесса, при необходимости корректировал параметры, начинал и завершал процесс. При усложнении производства стали использоваться специальные контрольно-измерительные устройства, которые позволили получать достоверные данные и объективно оценивать ход технологического процесса. Во многих отраслях промышленности при увеличении количества и качества выпускаемой продукции повысились специальные требования, связанные с напряжённостью труда и квалификацией работников. Дальнейший рост мощностей и других параметров оборудования привёл к необходимости освободить работника (который стал «слабым звеном» в производственном процессе) от утомительной задачи: находясь вблизи работающих машин и аппаратов, следить за показаниями приборов и вручную выполнять необходимые переключения, подстройки параметров. Важным техническим достижением стало создание измерительных, регулирующих и исполнительных устройств с внешними источниками энергии, механизмов с пневматическими, гидравлическими и электрическими приводами. Это позволило организовать посты дистанционного контроля и простейшие системы регулирования автоматического в технологическом процессе. С появлением контрольно-измерительных и управляющих устройств с унифицированным интерфейсом (стандартизованными входными и выходными сигналами) появилась возможность объединять местные посты в центральные пульты управления. Стали применяться мнемонические схемы, на которых в графические изображения технологических процессов встраивались приборы индикации и сигнализации, что облегчало работу оператора.
1.4. Классификация систем автоматического управления
1.4.1. Классификация по виду математического описания
По виду математического описания (уравнений динамики и статики) системы автоматического управления (САУ) подразделяются на линейные и нелинейные системы (САУ или САР).
Каждый “подкласс” (линейных и нелинейных) подразделяется на еще ряд “подклассов”. Например, линейные САУ (САР) имеют различия по виду математического описания. Поскольку в этом семестре будут рассматриваться динамические свойства только линейных систем автоматического управления (регулирования), то ниже приведем классификацию по виду математического описания для линейных САУ (САР):
1) Линейные системы автоматического управления, описываемые в переменных «вход-выход» обыкновенными дифференциальными уравнениями (ОДУ) с постоянными коэффициентами:
где
x(t)
– входное воздействие;
y(t)
– выходное воздействие (регулируемая величина).
Если использовать операторную («компактную») форму записи линейного ОДУ, то уравнение (1.4.1) можно представить в следующем виде:
где,
p = d/dt
— оператор дифференцирования;
L(p), N(p)
— соответствующие линейные дифференциальные операторы, которые равны:
2) Линейные системы автоматического управления, описываемые линейными обыкновенными дифференциальными уравнениями (ОДУ) с переменными (во времени) коэффициентами:
В общем случае такие системы можно отнести и к классу нелинейных САУ (САР).
3) Линейные системы автоматического управления, описываемые линейными разностными уравнениями:
где
f(…)
– линейная функция аргументов;
k = 1, 2, 3…
— целые числа;
Δt
– интервал квантования (интервал дискретизации).
Уравнение (1.4.4) можно представить в «компактной» форме записи:
Обычно такое описание линейных САУ (САР) используется в цифровых системах управления (с использованием ЭВМ).
4) Линейные системы автоматического управления с запаздыванием:
где
L(p), N(p)
— линейные дифференциальные операторы;
τ
— время запаздывания или постоянная запаздывания.
Если операторы L(p)
и
N(p)
вырождаются (
L(p) = 1; N(p) = 1
), то уравнение (1.4.6) соответствует математическому описанию динамики звена идеального запаздывания:
а графическая иллюстрация его свойств привдена на рис. 1.4.1
Рис. 1.4.1 — Графики входа и выхода звена идеального запаздывания
5) Линейные системы автоматического управления, описываемые линейными дифференциальными уравнения в частных производных
. Нередко такие САУ называют распределенными системами управления. ==> «Абстрактный» пример такого описания:
Система уравнений (1.4.7) описывает динамику линейно распределенной САУ, т.е. регулируемая величина зависит не только от времени, но и от одной пространственной координаты. Если система управления представляет собой «пространственный» объект, то ==>
где зависит от времени и пространственных координат, определяемых радиусом-вектором
6) САУ, описываемые системами ОДУ, или системами разностных уравнений, или системами уравнений в частных производных ==> и так далее…
Аналогичную классификацию можно предложить и для нелинейных САУ (САР)…
Для линейных систем выполеняются следующие требования:
- линейность статической характеристики САУ;
- линейность уравнения динамики, т.е. переменные в уравнение динамики входят только в линейной комбинации.
Статической характеристикой называется зависимость выхода от величины входного воздействия в установившемся режиме (когда все переходные процессы затухли).
Для систем, описываемых линейными обыкновенными дифференциальными уравнениями с постоянными коэффициентами статическая характеристика получается из уравнения динамики (1.4.1) приравниванием нулю всех нестационарных членов ==>
На рис.1.4.2 представлены примеры линейной и нелинейных статических характеристик систем автоматического управления (регулирования).
Рис. 1.4.2 — Примеры статических линейных и нелинейных характеристик
Нелинейность членов, содержащих производные по времени в уравнениях динамики, может возникнуть при использовании нелинейных математических операций (*, /, , , sin, ln и т.д.). Например, рассматривая уравнение динамики некоторой «абстрактной» САУ
отметим, что в этом уравнении при линейной статической характеристики второе и третье слагаемые (динамические члены) в левой части уравнения — нелинейные, поэтому САУ, описываемая подобным уравнением, является нелинейной в динамическом
плане.
1.4.2. Классификация по характеру передаваемых сигналов
По характеру передаваемых сигналов системы автоматического управления (или регулирования) подразделяются:
- непрерывные системы (системы непрерывного действия);
- релейные системы (системы релейного действия);
- системы дискретного действия (импульсные и цифровые).
Системой непрерывного действия называется такая САУ, в каждом из звеньев которой непрерывному изменению входного сигнала во времени соответствует непрерывное изменение выходного сигнала, при этом закон изменения выходного сигнала может быть произвольным. Чтобы САУ была непрерывной, необходимо, чтобы статические характеристики всех звеньев были непрерывными.
Рис. 1.4.3 — Пример непрерывной системы
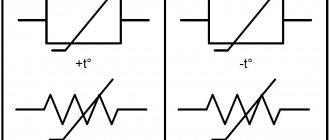
Системой релейного действия называется САУ, в которой хотя бы в одном звене при непрерывном изменении входной величины выходная величина в некоторые моменты процесса управления меняется “скачком” в зависимости от величины входного сигнала. Статическая характеристика такого звена имеет точки разрыва или излома с разрывом.
Рис. 1.4.4 — Примеры релейных статических характеристик
Системой дискретного действия называется система, в которой хотя бы в одном звене при непрерывном изменении входной величины выходная величина имеет вид отдельных импульсов, появляющиеся через некоторый промежуток времени.
Звено, преобразующее непрерывный сигнал в дискретный сигнал, называется импульсным. Подобный вид передаваемых сигналов имеет место в САУ с ЭВМ или контроллером.
Наиболее часто реализуются следующие методы (алгоритмы) преобразования непрерывного входного сигнала в импульсный выходной сигнал:
- амплитудно-импульсная модуляция (АИМ);
- широтно-импульсная модуляция (ШИМ).
На рис. 1.4.5 представлена графическая иллюстрация алгоритма амплитудно-импульсной модуляции (АИМ). В верхней части рис. представлена временная зависимость x(t)
— сигнала на входе в импульсное звено. Выходной сигнал импульсного блока (звена)
y(t)
– последовательность прямоугольных импульсов, появляющихся с постоянным периодом квантования Δt (см. нижнюю часть рис.). Длительность импульсов – одинакова и равна Δ. Амплитуда импульса на выходе блока пропорциональна соответствующей величине непрерывного сигнала x(t) на входе данного блока.
Рис. 1.4.5 — Реализация амплитудно-импульсной модуляции
Данный метод импульсной модуляции был весьма распространен в электронно-измерительной аппаратуре систем управления и защиты (СУЗ) ядерных энергетических установок (ЯЭУ) в 70-х…80-х годах прошлого столетия.
На рис. 1.4.6 представлена графическая иллюстрация алгоритма широтно-импульсной модуляции (ШИМ). В верхней части рис. 1.14 представлена временная зависимость x(t)
– сигнала на входе в импульсное звено. Выходной сигнал импульсного блока (звена)
y(t)
– последовательность прямоугольных импульсов, появляющихся с постоянным периодом квантования
Δt
(см. нижнюю часть рис. 1.14). Амплитуда всех импульсов – одинакова. Длительность импульса
Δt
на выходе блока пропорциональна соответствующей величине непрерывного сигнала
x(t)
на входе импульсного блока.
Рис. 1.4.6 — Реализация широтно-импульсной модуляции
Данный метод импульсной модуляции в настоящее время является наиболее распространенным в электронно-измерительной аппаратуре систем управления и защиты (СУЗ) ядерных энергетических установок (ЯЭУ) и САУ других технических систем.
Завершая данный подраздел, необходимо заметить, что если характерные постоянные времени в других звеньях САУ (САР) существенно больше Δt (на порядки), то импульсная система может считаться непрерывной системой автоматического управления (при использовании как АИМ, так и ШИМ).