Пусковой ток и его кратность
Чтобы тронуть с места (пустить) двигатель, нужен громадный пусковой ток (Iп). Громадный – по сравнению с номинальным (рабочим) током Iн на установившейся скорости. В статьях обычно указывают, что пусковой ток превышает рабочий в 5-8 раз. Это число называется “Кратность пускового тока” и обозначается как коэффициент Кп = Iп / Iн.
Пусковой ток – это ток, который потребляет электродвигатель во время пуска. Узнать пусковой ток можно, зная номинальный ток и коэффициент Кп:
Iп = Кп · Iн
Номинальный ток всегда указан на шильдике двигателя:
Номинальный ток двигателя для разных напряжений и схем включения
Кп – рабочий параметр, который указан в характеристиках двигателя, но на корпусе двигателя он никогда не указывается.
Замечу, что не надо путать номинальный и рабочий токи. Номинальный ток – это ток, на котором двигатель может работать продолжительное время, он ограничен только нагревом обмотки статора. Рабочий ток – это реальный ток в данном агрегате, он всегда меньше либо равен номинальному. На практике рабочий ток измеряется токоизмерительными клещами, амперметром или трансформатором тока.
Если рабочий ток больше номинального – жди беды. Читайте мою статью про то, как защитить электродвигатель от перегрузки и перегрева.
Кратность пускового тока . На шильдике его обычно нет, а в документации и на сайтах производителей он присутствует:
Параметры двигателей. Кратность пускового тока
Пример из первой строчки на картинке: конкретный двигатель мощностью 1,5 кВт имеет номинальный ток 3,4 А. Значит, пусковой ток в какой-то момент (сколько длится этот “момент” – рассмотрим ниже) может достигать значения 3,4 х 6,5 = 22,1 А!
Судя по каталогам (их можно будет скачать в конце статьи, как обычно у меня), пусковой ток превышает номинальный в пределах от 3,5 до 8,5 раз.
Кратность пускового тока зависит прежде всего от мощности двигателя и от количества пар полюсов. Чем меньше мощность, тем меньше пусковой ток. А чем меньше пар полюсов (больше номинальные обороты) – тем больше пусковой ток.
То есть, самым большим током при пуске (7 – 8,5 от номинала) обладают высокооборотистые двигатели (3000 об/мин, 1 пара полюсов) сравнительно большой мощности (более 10 кВт).
Так происходит потому, что потребляемый ток и момент инерции при пуске зависит от конструкции двигателя и способа намотки. Мало полюсов – низкое сопротивление обмоток. Низкое сопротивление – большой ток. Кроме того, высокооборотистым движкам для полной раскрутки требуется больше времени, а это опять же тяжелый пуск.
Если объяснить более научным языком, то дело происходит так. Когда двигатель стоит, его степень скольжения S = 1. При раскручивании (или, как любят говорить спецы, разворачивании) S стремится к нулю, но никогда его не достигает – на то двигатель и называют асинхронным, ведь вращение ротора никогда не догонит вращение поля статора из-за потерь. Одновременно сердечник ротора насыщается магнитным полем, увеличивается ЭДС самоиндукции и индукционное сопротивление. А значит, уменьшается ток.
Кому хочется узнать подробнее – в конце статьи я выложил несколько хороших книг по теме.
На самом деле не так всё просто, начинаем копать глубже.
Расчет тока электродвигателя
Привет посетители сайта fazanet.ru, и в сегодняшней статье мы с вами разберём, как же сделать, этот непонятный расчёт тока электродвигателя. Каждый уважающий себя электромонтёр, робота которого связана с обслуживанием электрических, машин просто обязан это знать. Я в своё время тоже помню, что меня это очень сильно интересовало, когда меня перевили с одного цеха в другой. А конкретно именно работать электромонтёром.
Перед этим я уже немного затрагивал темы электродвигателей, когда писал о том как запустить асинхронные двигателей, и когда писал какие бывают номиналы электродвигателей.
Ну а теперь приступим конкретно к самому расчёту. Допустим: у вас есть трёхфазный асинхронный электродвигателей переменного тока, номинальная мощность, которого составляет 25 кВт, и вам хочется узнать какой же у него будет номинальный ток.
Для этого существует специальная формула: Iн = 1000Pн /√3•(ηн • Uн • cosφн),
Где Pн – это мощность электродвигателя; измеряется в кВт
Uн – это напряжение, при котором работает электродвигатель; В
ηн – это коэффициент полезного действия, обычно это значение 0.9
ну и cosφн – это коэффициент мощности двигателя, обычно 0.8.
Последние два значения обычно пишутся на заводской бирке, хотя они у всех двигателей практически одинаковые. Но все же нужно брать данные именно с заводской бирки на двигателе.
Вот как на этой картинке все значения видны, а ток нет. Только если КПД написан 81%, то для расчёта нужно брать 0.81.
Теперь подставим значения Iн = 1000•25/√3 • (0.9 • 380 • 0.8) = 52.81 А
Тем, кто не помнит, сколько будет √3, напоминаю – это будет 1,732
Вот и всё, все расчёты закончены. Всё очень легко и просто. По моему образцу вы можете легко рассчитать номинальный ток электродвигателя, вам всего лишь нужно подставить своих данных.
Как узнать пусковой ток?
Кратность пускового тока (отношение пускового тока к номинальному) найти в документации на двигатель бывает не так-то просто. Но его можно измерить (оценить, узнать) самому. Вот навскидку несколько способов:
- Первый способ (лучший для теоретического изучения) – использовать осциллограф. Взять шунт (например, резистор 0,1…0,5 Ом, чем меньше по сравнению с обмотками, тем лучше), и посмотреть на нём осциллограмму в момент пуска. Далее из максимального амплитудного значения определяем действующее напряжение (поделить на корень из 2), далее по закону Ома считаем пусковой ток. Можно ничего не умножать и не делить – просто измерить клещами ток в рабочем режиме, и умножить его на разницу токов на экране осциллографа. Способ хорош тем, что видно переходные процессы, вызванные ЭДС самоиндукции, мгновенные значения тока, длительность разгона. Кроме того, учитываются параметры питающей сети. Ещё плюс – пусковой ток измеряется реальный, на реальном двигателе и механизме.
- Второй способ измерения пускового тока – подать на двигатель пониженное (в 5-10 раз) напряжение рабочей частоты и измерить ток. Почему пониженное? Это необходимо для того, чтобы ротор можно было легко зафиксировать, не допуская перегрева. Измеренный ток пересчитать, получим пусковой. Достаточно измерить ток на одной фазе. По другим токи будут (обязаны быть) такими же. Этот способ используют при производстве и испытаниях двигателей. Именно этим способом производители получают табличные данные. Способ опирается на номинальный ток, в реальности (на реальном механизме) пусковой ток может быть другим!
- Измерить пусковой ток токоизмерительными клещами. Плюс этого способа – простота и оперативность. Клещи используют в большинстве случаев для проверки режимов работы двигателей. Минус – такие клещи достаточно инерционны, а нам нужно увидеть, что происходит за доли секунды. Но этот минус нивелируется, когда мы измеряем ток при пуске нагрузки с высоким моментом инерции (вентиляторы, насосы с массивными крыльчатками). Пуск длится более 10 сек, и на экране клещей всё видно. Добавлю, что есть клещи с функцией Inrush, которые могут измерять пусковой ток от 0 до максимума в течение времени интегрирования порядка 100 мс.
- Трансформатор тока. Такой используется, например, в узлах учета электроэнергии – благодаря трансформатору тока нет необходимости измерять реальной ток, а можно измерить ток, уменьшенный в точно известное количество раз. Так же измеряют ток в электронных пусковых устройствах (преобразователях частоты, софтстартерах). Минус способа – трансформатор тока рассчитан на частоту 50/60 Гц, а переходные процессы во время пуска имеют широкий спектр и много гармоник. Поэтому можно сказать, что такой способ тоже обладает высокой инерционностью.
Конечно, реальность отличается от эксперимента. Прежде всего тем, что ток короткого замыкания реальной сети питания не бесконечен. То есть, провода, питающие двигатель, имеют сопротивление, на котором в момент пуска падает напряжение (иногда – до 50%). Из-за этого ограничения реальный пусковой ток будет меньше, а разгон – длительнее. Поэтому нужно понимать, что значение кратности пускового тока, указанное производителем, в реальности всегда будет меньше.
Для чего нужны двигатели – приводить в действие механизмы и получать прибыль!
Теперь разберём другой вопрос –
Вентильные электродвигатели
Группа вентильных электродвигателей включает в себя приводы, в которых регулирование режима эксплуатации осуществляется посредством вентильных преобразователей.
К преимуществам данного оборудования относятся:
- Высокий эксплуатационный ресурс.
- Простота обслуживания за счет бесконтактного управления.
- Высокая перегрузочная способность, которая в пять раз превышает пусковой момент.
- Широкий диапазон регулирования частоты вращения, который почти вдвое выше диапазона асинхронных электродвигателей.
- Высокий КПД при любой нагрузке – более 90 процентов.
- Небольшие габариты.
- Быстрая окупаемость.
Какой вред от пускового тока?
Пусковой ток – это проблема. Это –
- перегрузка питающей сети, приводящая к нагреву (вплоть до отгорания контактов) и проседанию напряжения;
- чрезмерный износ, перегрузка и перегрев двигателя, у некоторых производителей среди параметров двигателя указывается максимальное количество пусков в час или в сутки – именно из-за перегрева;
- износ и перегрузка механического привода (подшипники, редукторы, ремни), особенно обладающего большим моментом инерции,
- помехи, вызванные включением контакторов, которые передаются не только по проводам, но и через электромагнитное поле,
- проблемы с технологией – многие процессы нельзя начинать резко.
От пускового тока перегружается всё, и момент пуска становится в тягость вcем участникам процесса. Именно в этот критический момент может проявиться “слабое звено”. Кроме того, многие участники электропитания, работающие в этой сети, испытывают проблемы – например, лампочки снижают яркость из-за снижения напряжения, а контроллеры могут зависнуть из-за мощной помехи.
И в то же время пусковой ток – это проблема, от которой никуда не деться, если сразу подавать на двигатель номинальное питание и не использовать специальные методы.
Поэтому разберём,
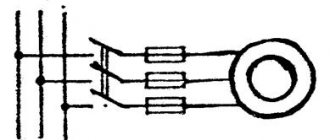
Принцип работы электромотора с фазным ротором
Теперь подробнее рассмотрим принцип действия асинхронного двигателя с ротором фазным и его подключение. Здесь можно выделить очередность из пяти важных этапов:
- первый этап – на имеющий тройную обмотку статор поступает напряжение от трехфазной электросети переменного тока с нужными параметрами;
- второй этап – формируется магнитное поле, приводящее в движение ротор;
- третий этап – ротор постепенно разгоняется, а его скорость оборотов значительно возрастает;
- четвертый этап – когда линии полей статора и ротора достигают определенного значения и пересекаются, возникает электродвижущая сила, воздействующая на обмотку ротора и создающая на ней электрический ток;
- пятый этап – статорные и роторные магнитные поля начинают активно взаимодействовать между собой, поддерживая вращательный момент вала.
Далее управление асинхронным двигателем с ротором фазного типа осуществляется в штатном режиме. Принцип работы асинхронного двигателя с фазным ротором отличается от короткозамкнутого варианта еще и наличием полноценной трехфазной обмотки с аналогичной укладкой на статорной и роторной части.
Типовая схема управления асинхронным двигателем с фазным ротором выглядит так:
Схема управления асинхронным двигателем с фазным ротором показывает, что роторные обмоточные выводы соединены с контактными кольцами, установленными на вал электромотора. Эти кольца имеют защитную изоляцию, как между собой, так и в точках соприкосновения с валом. Для каждой из фаз, каких обычно насчитывается три, на роторе предусмотрена своя отдельная обмотка. Схема пуска этих обмоток чаще всего имеет вид «Звезды».
К роторной обмотке монтируется реостат управления, сопряженный со щетками и контактными кольцами. Несмотря на кажущуюся сложность такой конструкции и более тщательный расчет асинхронного мотора, возможностей регулировки рабочего момента на валу здесь на порядок больше, чем у двигателей с ротором короткозамкнутого типа, контроль и применение которых обычно связано с необходимостью использования частотного преобразователя или специального регулятора оборотов.
Статорная обмотка создается с учетом количества катушек и полюсов, которых на статоре и роторе должно быть одинаковое количество. Сдвиг катушек статора между собой происходит на определенное число градусов. Регулировка действия асинхронного двигателя с фазным ротором выполняется путем изменения тока в роторных обмотках. Это позволяет контролировать размер скольжения и рабочий момент электромотора. Чтобы снизить износ колец и щеток во время полного выведения реостата их обычно замыкают посредством специального устройства для поднимания щеток
Как уменьшить пусковой ток асинхронного двигателя
Решить проблему большого пускового тока электрически можно двумя путями:
- Вначале подавать на двигатель пониженное напряжение, а затем, по мере разгона, напряжение и скорость вращения поднять до номинального значения. Такой способ применяется в электронных устройствах запуска двигателей – софтстартерах (УПП) и преобразователях частоты (частотниках).
- Использовать ограничители пускового тока, когда при пуске двигатель питается через мощные резисторы, а потом по таймеру переключается на номинал. Сопротивление резисторов соизмеримо с сопротивлением обмотки стартера (единицы Ом, в зависимости от мощности). Это устройство легко сделать самому (контактор + реле времени).
- Сразу подавать полное напряжение, но сначала подключать обмотки так хитро, чтобы двигатель не раскручивался на полную мощность. И только когда в этом режиме двигатель раскрутится насколько это возможно, включать его на полную. Эта схема называется “Звезда – Треугольник”, читайте в следующей статье.
Можно сконструировать какую-то муфту, коробку передач, вариатор – для того чтобы раскрутить двигатель вхолостую, а потом подключить потребителя механического момента.
В современном оборудовании двигатели мощнее 2,2 кВт практически никогда напрямую не включают, поэтому для них пусковые токи рояли не играют. Для уменьшения пускового тока (и не только) в основном применяют преобразователи частоты, о которых будут отдельные статьи.
Расчет мощности электродвигателя
Расчет мощности электродвигателя по току можно произвести с помощью нашего онлайн калькулятора:
Полученный результат можно округлить до ближайшего стандартного значения мощности.
Стандартные значения мощностей электродвигателей: 0,25; 0,37; 0,55; 0,75; 1,1; 1,5; 2,2; 3,0; 4,0; 5,5; 7,5; 11; 15; 18,5; 22; 30; 37; 45; 55; 75 кВт и т.д.
Расчет мощности двигателя производится по следующей формуле:
P=√3UIcosφη
- U — Номинальное напряжение (напряжение на которое подключается электродвигатель);
- I — Номинальный ток электродвигателя (берется из паспортных данных электродвигателя, а при их отсутствии определяется расчетным путем);
- cosφ — Коэффициент мощности — отношение активной мощности к полной (принимается от 0,75 до 0,9 в зависимости от мощности электродвигателя);
- η — Коэффициент полезного действия — отношение электрической мощности потребляемой электродвигателем из сети к механической мощности на валу двигателя (принимается от 0,7 до 0,85 в зависимости от мощности электродвигателя);
Как снизить вред от пускового тока?
Если изменить схему питания двигателя невозможно (например, сосед по даче каждые пол часа запускает токарный станок, а никакие “методы воздействия” не воздействуют), то можно применить различные методы минимизации вреда от пусковых токов. Например:
- На важные потребители или на весь дом установить инверторный ИБП (UPS), который будет держать напряжение в норме при любом раскладе. Самый дорогой, но действенный способ.
- Поставить стабилизатор напряжения. Но учтите, что не все стабилизаторы одинаково полезны. Иногда они могут не справляться, а иногда – даже усугублять ситуацию. Подробнее – по приведенной ссылке.
- Если питание – однофазное, то можно попробовать переключиться с “плохой” фазы на “хорошую”. Иногда этот способ так же эффективен, как использование телепорта вместо автобуса “Таганрог-Москва”.
Но напоминаю, что мы тут занимаемся не устранением последствий, а предотвращением проблем, поэтому погнали дальше.
Особенности расчета
Определение значения пускового тока электродвигателя проводится в два этапа. Сначала необходимо рассчитать номинальный электроток, для этого используется следующая формула:
Затем можно переходить к определению показателя тока пуска, используя формулу:
Зная это значение, можно легко подобрать выключатели-автоматы, обеспечивая тем самым надежную защиту линии включения. В паспорте электродвигателей указано значение силы тока при номинальной нагрузке на валу силового агрегата. Например, если на моторе присутствует надпись 13,8/8 А, то при его включении в сеть на 220 В и номинальной нагрузке, сила тока будет составлять13,8 А. Когда он подсоединен к сети 380 В, то ток составит 8 А.
Если известна номинальная мощность силового агрегата, можно легко выяснить и его номинальный ток. Для этого предстоит воспользоваться формулой:
Иногда коэффициент мощности мотора может оказаться неизвестным. В такой ситуации стоит воспользоваться простым соотношением – 2 А/1 кВт.
Например, если показатель номинальной мощности мотора составляет 15 кВт, то он будет потреблять около 30 А. Погрешность при таком расчете минимальна.
Время действия и величина пускового тока
Длительностью пускового тока будем считать время, в течение которого ток понижается от максимума (Iп) до номинала (Iн). Эта длительность фактически равна времени разгона от нуля до номинальной скорости вращения.
Весь вопрос в том, какова длительность этого тока – 10 миллисекунд (пол периода), когда двигатель на холостом ходу, или 10 секунд, когда на валу массивная крыльчатка. Теоретически рассчитать это время невозможно. Однако, поделюсь некоторыми соображениями.
Как я говорил выше, ток двигателя при пуске может превышать норму в несколько раз (Кп). И некоторые начинающие электрики, которые не читают мой блог, считают, что защитный автомат нужно выбирать так же – на повышенный ток. В статьях и даже инструкциях пишут, что “При выборе автомата необходимо учитывать, что пусковой ток асинхронного электродвигателя в 5 – 7 раз превышает номинальный”. Как это учитывать? Неужели ток автомата выбирать в 5-7 раз выше номинального тока двигателя?
Пример:
Шильдик китайского электродвигателя 30 кВт
Написано – 56 А. Что это значит? Неужели то, что ток защитного автомата должен быть более 300 А? Конечно, нет. И выбор автомата в данном случае зависит не только от номинального тока двигателя (56 А), но и от времени действия пускового тока.
Кстати, давайте проведём расследование и узнаем пусковой ток этого двигателя. Ведь на сайт этого китайского производителя нам попасть не суждено. Исходные номинальные данные: мощность – 30 кВт, момент – 190,9 N·m, ток – 56 А. Смотрим по каталогам отечественных производителей, ищем подобный двигатель, ведь законы физики одинаковы и в России, и в Китае. Находим (каталог в конце статьи): это двигатель на 1500 оборотов, 4 полюса, с кратностью пускового тока Кп = 7. В итоге получаем: Iп = Iн · Кп = 56 · 7 = 392 А. Это теоретический пусковой ток, но это не ток уставки автомата!
Пусковой ток является максимально возможным током. Максимальным ток будет при пуске, то есть тогда, когда двигатель стоит. То есть, пусковой ток есть ВСЕГДА, и всегда его начальное значение имеет запредельную величину. В случае с нашим китайским движком – 392 А, если принять ток КЗ питающей сети равным бесконечности (источник напряжения с нулевым внутренним сопротивлением).
Расчет КПД электродвигателя
Онлайн расчет КПД (коэффициента полезного действия) электродвигателя
Расчет коэффициента полезного действия электродвигателя производится по следующей формуле:
η=P/√3UIcosφ
- P — Номинальная мощность электродвигателя (берется из паспортных данных электродвигателялибо определяется рассчетным путем);
- U — Номинальное напряжение (напряжение на которое подключается электродвигатель);
- I — Номинальный ток электродвигателя (берется из паспортных данных электродвигателя, а при их отсутствии определяется расчетным путем);
- cosφ — Коэффициент мощности — отношение активной мощности к полной (принимается от 0,75 до 0,9 в зависимости от мощности электродвигателя);
Оказались ли полезны для Вас данные онлайн калькуляторы? Или может быть у Вас остались вопросы? Напишите нам в комментариях!
Не нашли на сайте статьи на интересующую Вас тему касающуюся электрики? Напишите нам здесь. Мы обязательно Вам ответим.
Тепловое действие пускового тока
Если перейти к формулам, пусковой ток оказывает тепловое действие на электродвигатель, которое описывается так называемым интегралом Джоуля. Если по простому, то тепловая энергия, производимая электрическим током, пропорциональна квадрату тока, умноженному на время. Обозначается эта величина через I2t.
Хорошая новость в том, что защитный автомат имеет примерно такую же тепловую (время-токовую) характеристику, что и время-токовая характеристика разгона двигателя.
Сравните:
Время-токовые характеристики защитного автомата
Что видим? Для защиты двигателя используются в основном автоматы с характеристикой D, как раз для того, чтобы меньше реагировать на кратковременные перегрузки. Подробнее здесь.
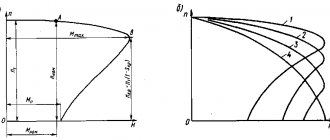
А для пускового тока двигателя график будет примерно такой:
График пускового тока (теоретический) при Кп = 6
Линейность графика – условная. Всё зависит от изменения момента нагрузки в процессе разгона. Теоретический график показан пунктиром. На этом графике Кп = Iп / Iн = 6, но это теоретическое (табличное) значение. Время разгона до номинала = tп.
Реальный график начерчен сплошной линией. На нём Iп` – это реальное значение пускового тока, которое всегда меньше теоретического. Это обусловлено тем, что питающая сеть имеет не нулевое сопротивление, и при повышении тока на проводах возникают потери напряжения.
Про потери на низком напряжении я писал тут, про потери в сетях 0,4 кВ – здесь.
Понятно, что из-за потерь время разгона будет больше, оно обозначено на графике через tп`.
Теперь повернём последний график, чтобы привести оси к одной системе координат:
Время от тока, если можно так выразиться
Не правда ли, весьма похоже на время-токовую характеристику защитного мотор-автомата?
Получается, что обе характеристики компенсируют друг друга, и при выборе автомата достаточно настроить его уставку на номинальный ток двигателя. При особо тяжелых пусках, когда площадь под кривой пуска двигателя больше площади под кривой защитного автомата, стоит подумать о плавном пуске – УПП либо ПЧ.
Синхронные электродвигатели
Синхронные двигатели – оптимальное решение для оборудования с постоянной скоростью работы: генераторов постоянного тока, компрессоров, насосов и др.
Технические характеристики синхронных электродвигателей разных моделей отличаются. Скорость вращения колеблется в диапазоне от 125 до 1000 оборотов/мин, мощность может достигать 10 тысяч кВт.
В конструкции приводов предусмотрена короткозамкнутая обмотка на роторе. Ее наличие позволяет осуществлять асинхронный пуск двигателя. К преимуществам оборудования данного типа относятся высокий КПД и небольшие габариты. Эксплуатация синхронных электродвигателей позволяет сократить потери электричества в сети до минимума.
Реальные измерения тока
Как я говорил выше, по моему мнению лучший способ “увидеть” пусковой ток – использовать активный (резистивный) шунт, и смотреть на нём напряжение осциллографом.
Я использовать вот такой шунт:
Шунт для измерения пускового тока при помощи осциллографа
Подопытный – мотор-редуктор, который через цепную передачу крутит вертикальный шнек:
Мотор-редуктор, на котором измеряем пусковой ток
Шнек на момент пуска был полным, поэтому его рабочий ток (7,7 А, измерено клещами) был почти равен номинальному (8,9 А, видно на шильдике).
Шильдик двигателя вертикального шнека
Ситуация по пусковому току видна на осциллографе:
Осциллограмма пускового тока 500 мс/дел
Приблизим интересующий момент, ускорив развертку до 100 мс/дел:
Осциллограмма пускового тока 100 мс/дел
Тут уже легко увидеть синус питающего тока и оценить коэффициент кратности пускового тока Кп, который примерно равен 4.
Ещё приблизим момент истины (до 50 мс/дел):
Момент пуска двигателя – ток пуска
Тут уже видны хорошо и переходные процессы, обусловленные индуктивностью и ЭДС самоиндукции обмоток двигателя. Этот импульс, длительность которого гораздо меньше периода сети 20 мс, даёт хорошую помеху с широким спектром в питающую сеть и радиоэфир.
Ещё один повод для использования ПЧ? Не совсем, там с помехами ситуация гораздо хуже!
Для тех, кто не хочет заморачиваться, повторю – есть клещи с функцией Inrush, которые могут измерять пусковой ток.
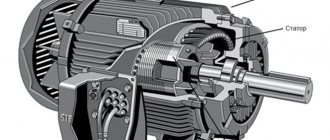
Устройство
Для работы с асинхронными двигателями и полного понимания принципов функционирования подобных машин, необходимо ознакомиться с особенностями их устройства:
- Основными частями конструкции агрегата является статор, находящийся в неподвижном состоянии, и вращающийся ротор, который расположен внутри него.
- Воздушный зазор разделяет оба элемента между собой.
- И статор, и ротор обладают специальной обмоткой.
- Статорная обмотка имеет подключение к питающей электросети с переменным напряжением.
- Роторная обмотка по своей сути является вторичной, поскольку не имеет подключения к сети, а передачу необходимой энергии для нее осуществляет непосредственно статор. Этот процесс происходит благодаря созданию магнитного потока.
- Корпус статора и корпус двигателя – это один элемент, который имеет в своей структуре запрессованный сердечник.
- В пазах сердечника размещены проводники обмотки. Специальный электротехнический лак обеспечивает надежную изоляцию данных объектов друг от друга.
- Обмотка сердечника особым образом разделена на секции, которые соединены в катушки.
- Катушки составляют фазы самого двигателя, к которым происходит подключение фазы от питающей электросети.
- Ротор состоит из вала и сердечника.
- Роторный сердечник создан из набранных пластин, которые изготавливаются из особой разновидности электротехнической стали. На его поверхности имеются симметричные пазы, внутри которых размещены проводники обмотки.
- Роторный вал в ходе работы выполняет функции по передаче крутящего момента непосредственно к приводному механизму машины.
- Роторы обладают собственной классификацией, короткозамкнутая разновидность имеет в своей конструкции стержни, изготовленные из алюминия. Они располагаются внутри сердечника, а на торцах замкнуты специальными кольцами. Подобная система получила название беличьего колеса. В машинах с наиболее высокой мощностью, пазы дополнительно заливаются алюминием, что способствует повышению прочности конструкции.
- Вместо короткозамкнутого ротора в конструкции может присутствовать фазная разновидность. Количество катушек, сдвинутых под определенным углом относительно друг друга, в такой системе зависит от числа парных полюсов. При этом, роторные пары полюсов всегда равны количеству аналогичных пар в статоре. Роторная обмотка соединена особым образом и напоминает по своей форме звезду, а ее лучи выводятся на контакты токосъемных колец, которые соединены при помощи механизма щеточного типа и пускового реостата.
Скачать
Надеюсь, читатели простят мне вольное объяснение процессов – я постарался всё объяснить “на пальцах”. Кому нужны академические знания, пожалуйста:
• В.Л.Лихачев. Асинхронные электродвигатели. 2002 г. / Книга представляет собой справочник, в котором подробно описано устройство, принцип работы и характеристики асинхронных электродвигателей. Приводятся справочные данные на двигатели прошлых лет выпуска и современные. Описываются электронные пусковые устройства (инверторы), электроприводы., djvu, 3.73 MB, скачан: 7198 раз./
• Беспалов, Котеленец — Электрические машины / Рассмотрены трансформаторы и электрические машины, используемые в современной технике. Показана их решающая роль в генерации, распределении, преобразовании и утилизации электрической энергии. Даны основы теории, характеристики, режимы работы, примеры конструкций и применения электрических генераторов, трансформаторов и двигателей., pdf, 16.82 MB, скачан: 2345 раз./
• М.М. Кацман — Электрические машины / Некоторые говорят, что это лучший учебник по электротехнике. В книге рассматриваются теория, принцип действия, устройство и анализ режимов работы электрических машин и трансформаторов как общего, так и специального назначения, получивших распространение в различных отраслях техники., pdf, 22.12 MB, скачан: 2108 раз./
• Каталог двигателей Электромаш / Асинхронные электродвигатели с короткозамкнутым ротором — каталог производителя, pdf, 3.13 MB, скачан: 1401 раз./
• Каталог двигателей ВЭМЗ / Параметры и каталог двигателей, pdf, 3.53 MB, скачан: 1197 раз./
• Дьяков В.И. Типовые расчеты по электрооборудованию / Практические расчеты по электрооборудованию, теоретические сведения, методики расчета, примеры и справочные данные., zip, 1.53 MB, скачан: 2554 раз./
• Карпов Ф.Ф. Как проверить возможность подключения нескольких двигателей к электрической сети / В брошюре приведен расчет электрической сети на колебание напряжения при пуске и самозапуске асинхронных двигателей с короткозамкнутым ротором и синхронных двигателей с асинхронным пуском. Рассмотрены условия, при которых допустим пуск и самозапуск двигателей. Изложение методов расчета иллюстрируется числовыми примерами. Брошюра предназначена для квалифицированных электромонтеров в качестве пособия при выборе типа электродвигателей, присоединяемых к коммунальной или промышленной электросети., zip, 1.9 MB, скачан: 1665 раз./
• Руководство по эксплуатации асинхронных двигателей / Настоящее руководство содержит наиболее важные указания по транспортировке, приемке, хранению, монтажу, пусконаладке, эксплуатации, техническому обслуживанию, поиску неисправностей и их устранению для электродвигателей производства «Электромашина». Руководство по эксплуатации предназначено для трехфазных асинхронных электродвигателей низкого и высокого напряжений серий А, АИР, МТН, МТКН, 4МТМ, 4МТКМ, ДА304, А4., pdf, 7.54 MB, скачан: 2566 раз./
• Каталог двигателей АИР / Каталог двигателей АИР — мощность от 0,12 до 315 кВт; частота вращения 3000, 1500, 1000, 750 об/мин; напряжение сети 220/380 В, 380/660 В;, pdf, 1.07 MB, скачан: 1076 раз./
• Ломоносов, В.Ю.; Поливанов, К.М.; Михайлов, О.П. Электротехника. / Ломоносов, В.Ю.; Поливанов, К.М.; Михайлов, О.П. Электротехника. Одна из лучших книг, посвящённых основам электротехники. Изложение начинается с самых основ: объясняется, что такое напряжение, сила тока и сопротивление, приводятся указания по расчёту простейших электрических цепей, рассказывается о взаимосвязи и взаимозависимости электрических и магнитных явлений. Объясняется, что такое переменный ток, как устроен генератор переменного тока. Описывается, что такое конденсатор и что собой представляет катушка индуктивности, какова их роль в цепях переменного тока. Объясняется, что такое трёхфазный ток, как устроены генераторы трёхфазного тока и как организуется его передача. Отдельная глава посвящена полупроводниковым приборам: в ней речь идёт о полупроводниковых диодах, о транзисторах и о тиристорах; об использовании полупроводниковых приборов для выпрямления переменного тока и в качестве полупроводниковых ключей. Коротко описываются достижения микроэлектроники. Последняя треть книги целиком посвящена электрическим машинам, агрегатам и оборудованию: в 10 главе речь идёт о машинах постоянного тока (генераторах и двигателях); 11 глава посвящена трансформаторам; о машинах переменного тока (однофазных и трёхфазных, синхронных и асинхронных) подробно рассказывается в 12 главе; выключатели, электромагниты и реле описываются в главе 13; в главе 14 речь идёт о составлении электрических схем. Последняя, 15 глава, посвящена измерениям в электротехнике. Эта книга — отличный способ изучить основы электротехники, понять основополагающие принципы работы электрических машин и агрегатов., zip, 13.87 MB, скачан: 2730 раз./
Ещё пособие по двигателям: • Пуск и защита двигателей переменного тока / Пуск и защита двигателей переменного тока. Системы пуска и торможения двигателей переменного тока. Устройства защиты и анализ неисправностей двигателей переменного тока. Руководство по выбору устройств защиты. Руководство от Schneider Electric, pdf, 1.17 MB, скачан: 2108 раз./
Электродвигатели постоянного и переменного тока
В зависимости от используемого электрического тока двигатели делятся на две группы:
- приводы постоянного тока;
- приводы переменного тока.
Электродвигатели постоянного тока сегодня применяются не так часто, как раньше. Их практически вытеснили асинхронные двигатели с короткозамкнутым ротором.
Главный недостаток электродвигателей постоянного тока – возможность эксплуатации исключительно при наличии источника постоянного тока или преобразователя переменного напряжения в постоянный ток. В современном промышленном производстве обеспечение данного условия требует дополнительных финансовых затрат.
Тем не менее, при существенных недостатках этот тип двигателей отличается высоким пусковым моментом и стабильной работой в условиях больших перегрузок. Приводы данного типа чаще всего применяются в металлургии и станкостроении, устанавливаются на электротранспорт.
Принцип работы электродвигателей переменного тока построен на электромагнитной индукции, возникающей в процессе движения проводящей среды в магнитном поле. Для создания магнитного поля используются обмотки, обтекаемые токами, либо постоянные магниты.
Что такое ток утечки и каковы причины превышения нормы утечки заряда?
Ток утечки – это величина, характеризующая процесс снижения емкости АКБ за счет как естественных причин, так и неисправностей в электронике машины или неправильной эксплуатации электроприборов.
В худшем случае автомобиль может не завестись вообще, если аккумулятор полностью “сядет”, однако эта ситуация может произойти лишь при серьезных неисправностях или оставленных на ночь в рабочем состоянии некоторых потребителей электричества. Если автовладелец возьмет за правило проверять, выключены ли потребители электроэнергии, вполне вероятно, что крупных неприятностей удастся избежать.
Утечка – нормальный процесс, однако существует нормированное значение утечки, которую допускает производитель. Чаще всего норма колеблется от 15-20 до 50 мА. На современных авто с большим количеством потребителей этот параметр может быть и выше.
Произвести замер тока утечки можно при помощи стандартного рожкового ключа и мультиметра. Также не забудьте надеть перчатки. Алгоритм действий следующий:
- отключите все потребители, в том числе видеорегистратор и противоугонную сигнализацию;
- отключите клемму минуса от АКБ;
- подключите мультиметр с измерением тока на минус батареи и вывод минуса;
- сравните показания с нормой по вашей модели.
Источник: www.kolesa-darom.ru
Практическое применение
Силовые приводы будут эксплуатироваться правильно только в том случае, если при их выборе были учтены пусковые характеристики.
Высокий стартовый ток представляет серьезную опасность для электрооборудования. Если не принимать мер по его ограничению, возможны серьезные проблемы.
Ток пуска может повредить не только сам мотор, но и другое электрооборудование, установленное с ним на одной линии. Для решения поставленной задачи можно использовать следующие методы: