Как определить скорость вращения электродвигателя
Под скоростью вращения асинхронного электродвигателя обычно понимают угловую частоту вращения его ротора, которая приведена на шильдике (на паспортной табличке двигателя) в виде количества оборотов в минуту. Трехфазный двигатель можно питать и от однофазной сети, для этого достаточно добавить конденсатор параллельно одной или двум его обмоткам, в зависимости от напряжения сети, но конструкция двигателя от этого не изменится.
Так, если ротор под нагрузкой совершает 2760 оборотов в минуту, то угловая частота данного двигателя будет равна 2760*2пи/60 радиан в секунду, то есть 289 рад/с, что не удобно для восприятия, поэтому на табличке пишут просто «2760 об/мин». Применительно к асинхронному электродвигателю, это обороты с учетом скольжения s.
Синхронная же скорость данного двигателя (без учета скольжения) будет равна 3000 оборотов в минуту, поскольку при питании обмоток статора сетевым током с частотой 50 Гц, каждую секунду магнитный поток будет совершать по 50 полных циклических изменений, а 50*60 = 3000, вот и получается 3000 оборотов в минуту — синхронная скорость асинхронного электродвигателя.
В рамках данной статьи мы поговорим о том, как определить синхронную скорость вращения неизвестного асинхронного трехфазного двигателя, просто взглянув на его статор. По внешнему виду статора, по расположению обмоток, по количеству пазов, — можно легко определить синхронные обороты электродвигателя если у вас нет под рукой тахометра. Итак, начнем по порядку и разберем данный вопрос с примерами.
3000 оборотов в минуту
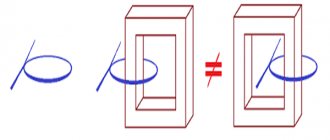
Про асинхронные электродвигатели (смотрите — Виды электродвигателей) принято говорить, что тот или иной двигатель имеет одну, две, три или четыре пары полюсов. Минимум — одна пара полюсов, то есть минимум — два полюса. Взгляните на рисунок. Здесь вы видите, что в статор уложено по две последовательно соединенные катушки на каждую фазу — в каждой паре катушек одна расположена напротив другой. Эти катушки и образуют по паре полюсов на статоре.
Одна из фаз показана для ясности красным цветом, вторая — зеленым, третья — черным. Обмотки всех трех фаз устроены одинаково. Поскольку три эти обмотки питаются по очереди (ток трехфазный), то за 1 колебание из 50 в каждой из фаз — магнитный поток статора один раз обернется на полные 360 градусов, то есть совершит один оборот за 1/50 секунды, значит 50 оборотов получится за секунду. Так и выходит 3000 оборотов в минуту.
Таким образом становится ясно, что для определения синхронных оборотов асинхронного электродвигателя достаточно определить количество пар его полюсов, что легко сделать, сняв крышку и взглянув на статор.
Общее число пазов статора разделите на число пазов, приходящихся на одну секцию обмотки одной из фаз. Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов. Следовательно синхронная частота составляет 3000 оборотов в минуту или примерно 2910 с учетом скольжения. В простейшем случае 12 пазов, по 6 пазов на катушку, и таких катушек 6 — по две на каждую из трех фаз.
Обратите внимание, количество катушек в одной группе для одной пары полюсов может быть не обязательно 1, но и 2 и 3, однако для примера мы рассмотрели вариант с одиночными группами на пару катушек (не будем в рамках данной статьи заострять внимание на способах намотки).
1500 оборотов в минуту
Для получения синхронной скорости в 1500 оборотов в минуту, количество полюсов статора увеличивают вдвое, чтобы за 1 колебание из 50 магнитный поток совершил бы только пол оборота — 180 градусов.
Для этого на каждую фазу делают по 4 секции обмотки. Таким образом, если одна катушка занимает четверть всех пазов, то перед вами двигатель с двумя парами полюсов, образованными четырьмя катушками на фазу.
Например, 6 пазов из 24 занимает одна катушка или 12 из 48, значит перед вами двигатель с синхронной частотой 1500 оборотов в минуту, или с учетом скольжения примерно 1350 оборотов в минуту. На приведенном фото каждая секция обмотки выполнена в виде двойной катушечной группы.
1000 оборотов в минуту
Как вы уже поняли, для получения синхронной частоты в 1000 оборотов в минуту, каждая фаза образует уже три пары полюсов, чтобы за одно колебание из 50 (герц) магнитный поток обернулся бы всего на 120 градусов, и соответствующим образом повернул бы за собой ротор.
Таким образом, минимум 18 катушек установлены на статор, причем каждая катушка занимает шестую часть всех пазов (по шесть катушек на фазу — по три пары). Например, если пазов 24, то одна катушка займет 4 из них. Получится частота с учетом скольжения около 935 оборотов в минуту.
750 оборотов в минуту
Для получения синхронной скорости в 750 оборотов в минуту, необходимо, чтобы три фазы формировали на статоре четыре пары движущихся полюсов, это по 8 катушек на фазу — одна напротив другой — 8 полюсов. Если например на 48 пазов приходится по катушке на каждые 6 пазов — перед вами асинхронный двигатель с синхронными оборотами 750 (или около 730 с учетом скольжения).
500 оборотов в минуту
Наконец, для получения асинхронного двигателя с синхронной скоростью в 500 оборотов в минуту необходимо 6 пар полюсов — по 12 катушек (полюсов) на фазу, чтобы на каждое колебание сети магнитный поток поворачивался бы на 60 градусов. То есть, если например статор имеет 36 пазов, при этом на катушку приходится по 4 паза — перед вами трехфазный двигатель на 500 оборотов в минуту (480 с учетом скольжения).
Смотрите также: Как отличить асинхронный двигатель от двигателя постоянного тока
Андрей Повный
Общие ведомости
По сути, количество полюсов – это всегда четное число (из-за этого и проводится подсчет именно пар точек, а не отдельных элементов). В современных асинхронных электродвигателях реализуется два типа обмотки:
Читайте также: Для чего нужны физминутки на уроках
- сосредоточенная;
- распределенная.
Концентрированная обмотка подходит для бесщеточных двигателей. Вы можете легко изменить количество антиподов, изменив соединение катушек. Статор с шестью обмотками допускает два ключевых типа подсоединения. Один имеет месть на двух сторонах, второй – на четырех или восьми. Однако менять количество полюсов готового двигателя на четыре или восемь неразумно. Распределенная обмотка, которая часто используется для обеспечения 12 точек статора с девятью пазами, подходит для асинхронных двигателей. В таком случае количество подбирается еще до начала запуска намотки мотора.
Хотя небольшие двигатели обычно имеют четыре антипода, двухполюсные двигатели также используются для высокоскоростных приложений, требующих 50 или 60 оборотов в секунду. До того, как были введены бесщеточные двигатели, когда-то использовалась методика изменения количества полюсов в асинхронных силовых агрегатах с короткозамкнутыми якорями. Основа метода предполагает изменение типа соединения сложных обмоток, которые нельзя классифицировать как распределенную катушку или концентрированную обмотку. Данный способ был попыткой разрешить работу на двух разных скоростях путем изменения синхронной скорости. Модели моторов витками такой разновидностью называют моторами с расщепленными сторонами.
Подключение асинхронного двигателя к однофазной сети
Обратимся к конструкции трехфазного асинхронного двигателя. Как мы знаем, рабочих фаз двигателя – 3, и клемм для их подключения тоже 3. А в однофазной бытовой сети 220 Вольт проводов всего два – фаза и ноль. Что подключить на третью клемму двигателя? Если на нее подключить ответвление от любого из этих двух проводов, то мы получим просто короткое замыкание со всеми вытекающими последствиями.
Выходом является подключение такого ответвления через конденсатор. Слово «конденсатор» переводится на русский язык как «накопитель». Как известно, работает он по принципу «заряд-разряд». То есть, включенный в сеть конденсатор, какое-то время накапливает заряд, а потом, разряжаясь, отдает его обратно в сеть. Времени, в течение которого конденсатор накапливает заряд, вполне достаточно для того, чтобы фаза, от которой он питается, «ушла» вперед, сдвинулась по времени. Сдвинувшись, фаза как бы «освобождает место» для того разряда, который выдаст конденсатор, и исключает возможность «короткого» замыкания. Из-за того, что своей работой конденсатор «сдвигает» фазы, он называется фазосдвигающим. Более подробно про работу конденсатора в цепи переменного тока можно прочитать в этой статье. Таким образом, создается третий провод необходимый для подключения двигателя.
Схемы подключения к однофазной сети
Здесь все достаточно просто. Мы должны соединить конденсатор между двумя фазами. В схеме со звездой это будет выглядеть вот так.
Читайте также: Марки крестовин стрелочных переводов
Для того, чтобы поменять вращение двигателя, нам надо просто поменять местами фазу (L) и ноль (N) местами.
Читайте также: Таблица веса свиней по замерам
Ну и все то же самое касается и со схемой подключения “треугольник”.
Как выбрать конденсатор
При подборе конденсатора нужно помнить, что у него есть две характеристики: напряжение, на которое он рассчитан, и его электрическая емкость. Правило подбора напряжения можно выразить простыми словами: рабочее напряжение конденсатора, указанное на его корпусе должно быть больше рабочего напряжения сети, в которую включается двигатель. Более точно это правило выражается формулой:
Вполне может быть так, что полученное значение окажется промежуточным. То есть таким, на которое конденсаторы не выпускаются. Например, для сети 220 В, по формуле получится 311,13 В. На такое напряжение конденсаторы не выпускались. Тогда конденсатор подбирается на ближайшее значение в большую сторону. В нашем случае можно взять конденсатор на 380 Вольт и больше.
Расчет емкости конденсатора
Расчет емкости конденсатора производится по формуле, в которой учитывается схема соединения обмоток двигателя. Дело в том, что при расчете емкости учитывается не только рабочее напряжение сети, но и ток, протекающий по обмоткам двигателя. Большую роль играет и тот факт, что во время запуска двигателя, в обмотках возникает так называемый пусковой ток, который намного больше рабочего тока двигателя. А так как рабочий ток двигателя зависит от схемы включения обмоток, то естественно, и пусковой ток будет тоже зависеть от этой схемы.
Итак, формула расчета конденсатора:
где
С – искомая емкость конденсатор, мкФ
К – коэффициент, зависящий от схемы подключения обмоток
IН – номинальный ток двигателя, Амперы
Таблица выбора защитного автомата по мощности нагрузки
Таблица потребления и ток защитного автомата по мощности приборов
Видно, что производитель рекомендует разные время-токовые характеристики для разных электроприборов. Там, где нагрузка чисто активная (разные типы нагревателей), рекомендована характеристика автомата “B”. Там, где есть электродвигатели – “С”. Ну а там, где используются мощные двигатели с тяжелым запуском – “D”.
Время-токовая характеристика D в эту таблицу не вошла, потому что она не для бытового применения. Подробнее о запуске двигателей рассказано в статье про подключение электродвигателя через магнитный пускатель. А также – про включение твердотельного реле.
Асинхронные электродвигатели
В предыдущих разделах мы разобрали, почему электродвигатели переменного тока называют также индукционными электродвигателями, или электродвигателями типа «беличье колесо». Далее объясним, почему их ещё называют асинхронными электродвигателями. В данном случае во внимание принимается соотношение между количеством полюсов и числом оборотов, сделанных ротором электродвигателя.
Частоту вращения магнитного поля принято считать синхронной частотой вращения (Ns). Синхронную частоту вращения можно рассчитать следующим образом: частота сети (F), умноженная на 120 и разделенная на число полюсов (P).
Если, например, частота сети 50 Гц, то синхронная частота вращения для 2-полюсного электродвигателя равна 3000 мин-1.
Синхронная частота вращения уменьшается с увеличением числа полюсов. В таблице, приведенной ниже, показана синхронная частота вращения для различного количества полюсов. Синхронная частота вращения для различного количества полюсов
| Числополюсов | Синхронная частота вращения 50 Гц | Синхронная частота вращения 60 Гц |
| 2 | 3000 | 3600 |
| 4 | 1500 | 1800 |
| 6 | 1000 | 1200 |
| 8 | 750 | 900 |
| 12 | 500 | 600 |
Ток автоматического выключателя
Токи автоматов бывают из следующего ряда:
0,5, 1, 1,6, 2, 3,15, 4, 5, 6, 8, 10, 13, 16, 20, 25, 32, 40, 50, 63.
Жирным выделены номиналы, наиболее часто применяющиеся в быту. Есть и другие номиналы, но о них сейчас не будем.
Данный ток для автоматического выключателя является номинальным. При его превышении выключатель выключится. Правда, не сразу, о чем сказано ниже:
Параметры электродвигателя: таблица
| Наименование параметра | Единица измерения | Примечание |
| Тип | ||
| Номинальная мощность | Киловатт | |
| Номинальный ток | Ампер | Для трехфазных электродвигателей зависит от типа соединения обмоток |
| Номинальное напряжение | Вольт | |
| Коэффициент мощности (КПД) | ||
| Коэффициент полезного действия (cos ϕ) | % | |
| Номинальная скорость вращения | Обороты в минуту |
Но иногда табличка отсутствует, либо прочесть ее невозможно. При эксплуатации двигатель неоднократно окрашивают, нередко – вместе с табличкой. Поэтому приходится определять его параметры методом измерений.
Электродвигатели в составе мотор-редукторов
Электрические двигатели уже давно стали включаться в состав различных мотор-редукторов. Они находят свое применение как в трёхступенчатых типа МЦ3У. так и в двухступенчатых типа МЦ2У. Электромоторы имеют практически 90%-ный коэффициент полезного действия, не требуют постоянного обслуживания. Немаловажным параметром является и исключительная экологичность электрического мотора, вредные выхлопы отсутствуют вовсе, что делает его незаменимым при установке внутри помещения. Словом, в настоящее время электромоторы признаны в 3, а то и в 4 раза эффективнее традиционных двигателей внутреннего сгорания.
Но иногда, в случае выхода из строя электродвигателя, покупатель узнает, что абсолютно никакой сопроводительной документации к нему не прилагается. Маркировочные шильды, если и сохранились, могут находиться в изношенном потертом состоянии, так, что ничего на них рассмотреть попросту бывает невозможно. Как же в таком случае можно определить мощность двигателя и число его оборотов? Здесь поэтапно будут приведены советы, которые помогут это сделать.
Следует иметь в виду, что под числом оборотов подразумевается так называемая асинхронная скорость. Синхронная скорость это скорость вращения магнитного поля. Асинхронная скорость несколько ниже синхронной из-за наличия массы у вращательного элемента, а также воздействия сил трения, которые могут значительно понизить КПД мотора. Впрочем, на практике эти различия практически никогда не имеет решающего значения.
Сейчас на рынке представлено 3 основные категории асинхронных электродвигателей. Первая категория каталога – моторы, работающие при 1000 оборотах. На практике это число составляет порядка 950-970 оборотов, но для наглядности все-таки округляют до тысячи. Вторая категория моторы, выдающие 1500 об/мин. Это также округлено, так как в действительности диапазон лежит в пределах 1430-1470. Третья 3000 оборотов в минуту. Хотя реально такой мотор выдает 2900-2970 вращений.
Как самостоятельно узнать число оборотов электродвигателя
Зачастую, покупая с рук электродвигатель, автовладелец (и не только) в последующем обнаруживает, что к нему нет никакой документации. В таком случае, как правило, приходится самостоятельно определять обороты электродвигателя, а многие, как свидетельствует практика, не знают, как это сделать. Данная статья расскажет, как определить обороты электродвигателя самостоятельно и, что следует при этом знать.
Пошаговая инструкция определения оборотов
1. На сегодняшний день асинхронные электродвигатели подразделяются на три группы, каждая из которых говорит об индивидуальном обращении ротора в минуту. Первая группа – электродвигатели, делающие 1000 оборотов в минуту. Стоит сразу заметить, что данная цифра немного преувеличена, так как двигатель асинхронный.
Он делает, как правило, около 950-970 оборотов, но для удобства специалисты такие цифры решили округлить. Ко второй группе относятся двигатели, количество обращений ротора которых составляет 1500 за минуту. Эта цифра так же округленная, на самом деле электродвигатель делает 1430—1470 оборотом в минуту.
Третья группа асинхронных электродвигателей – это группа, к которой относится деталь, ротор которой оборачивается вокруг себя три тысячи раз за одну минуту. Реальная цифра оборотов – 2900-2970.
2. Для того, чтобы определить обороты электродвигателя, вам сначала нужно выявить, к какой же именно из указанных выше групп он относится. Для этого откройте одну из его крышек и найдите под низом катушку обмотки. Помните, такая катушка может состоять, как из одной детали, так и из нескольких, в частности трех-четырех. Кроме всего прочего знайте, что подобных катушек в электродвигателе может быть несколько. Вам достаточно одной, до которой, чтобы рассмотреть, нужно меньше всего прикладывать усилий.
3. Внимание! Катушки между собой связаны определенными деталями, которые иногда мешают рассмотреть нужную информацию. Ни при каких обстоятельствах нельзя отсоединять ничего друг от друга. Внимательно приглядитесь к выбранной вами детали и попробуйте приблизительно определить размер катушки относительно кольца статора.
4. Данное расстояние, чтобы узнать обороты электродвигателя, вовсе не нужно определять до точности. Приблизительные расчеты подойдут вам.
Если размер катушки, примерно, закрывает собой половину кольца статора, то скорость вращения ротора – три тысячи оборотов в минуту.
Если размер катушки покрывает, приблизительно, треть самого кольца, электродвигатель будет относиться ко второй группе и, следовательно, число оборотов, которые он сможет совершать, не будет превышать отметки 1500 за минуту.
Когда размер катушки равен одной четвертой по отношению к кольцу – число оборотов электродвигателя будет 1000 оборотов за одну минуту и, соответственно, двигатель будет относиться к третьей группе.
Не забывайте, что указанные цифры – это всего лишь приблизительная картина вращения, в реальности они могут отличаться и это зависит от множества факторов.
Эти статьи вам тоже пригодятся:
Теперь посмотрите это полезное видео:
Многие наверняка видели и уже имеют в своем гардеробе такие замечательные аксессуары из цветов канзаши. Эта статья научит вас технике их изготовления. Цветы из атласных лент – канзаси.
В данном уроке вы узнаете что такое модульное оригами и для изучения будет представлена схема сборки двойного лебедя, которого вы сможете собрать своими руками.
Для владельцев садовых участков, теплиц, гаражей и любых помещений, нуждающихся в утеплении. Загрузив такую печь один раз дровами можно будет потом пару суток к ней вообще не подходить.
Сейчас в продаже всё больше чупа-чупсы, твиксы и прочие заморские изделия. А почему бы Вам сегодня не сделать петушка на палочке и не порадовать своё дитя таким нестандартным подарком.
Как в походных, домашних и дачных условиях готовить продукт к копчению, подбирать коптильные дрова, мастерить самодельные коптильни, коптить продукт, и все это делать своими руками.
Параметры электродвигателя : тип соединения обмоток
Это очень важный параметр трехфазного электродвигателя. Все шесть выводов начал и концов обмоток выведены в барно двигателя. Подключить их можно либо в звезду, либо в треугольник.
Рядом с символами «треугольник/звезда»
на табличке указывается номинальное напряжение
– «220/380 В»
. Это означает, что при включении в сеть трехфазного тока напряжением 380 В обмотки двигателя нужно соединить в звезду. Ошибка в соединении приведет к выходу электродвигателя из строя.
Номинальный ток также указывается через дробь. В описанном случае необходимо значение, указанное в знаменателе.
Составляющие электромашины
Основой для электрической машины является правило электроиндукции с магнитной индукцией. Такой прибор включает в себя статор или как его называют константной частью (характерно для асинхронных, синхронных машин изменяющегося тока) или индуктора (для приборов константного тока) и ротора, его называют активной или движущейся частью (для асинхронных и синхронных машин изменяющегося тока) или якоря (приборов константного тока). В роли константной части для машин тока с малой мощью активно применяются магниты (неизменного состояния).
Механическая характеристика двигателя
Механической характеристикой называется зависимость момента от скольжения при постоянном напряжении и частоте сети.
На рис. 19 показана механическая характеристика двигателя. При пуске двигатель развивает пусковой момент МП
(S = 1); если пусковой момент больше момента сопротивления рабочей машиныМС
, то ротор двигателя развернется и двигатель будет работать в точке a характеристики.
Увеличивая момент сопротивления рабочей машины МС
, мы будем увеличивать скольжение, и точка a начнет перемещаться по характеристике к точке В точке 1 двигатель развивает максимальный момент, скольжение, соответствующее максимальному моменту, которое называется критическим —SКР
. При увеличении момента
МС
выше момента
Мm
скольжение быстро растет и ротор двигателя остановится (происходит «опрокидывание» двигателя).
Отношение пускового момента к номинальному называется кратностью пускового момента:
Рис. 19. Механическая характеристика асинхронного двигателя
Кратность пускового момента указывается в каталогах справочных данных, она должна быть больше 0,9.
Отношение максимального момента к номинальному называется перегрузочной способностью двигателя:
Перегрузочная способность указывается в каталогах. Она обычно находится в пределах 1,7—2,5. Механическая характеристика имеет две характерные ветви: ветвь (A—B
) — устойчивая часть характеристики (с увеличением скольжения момент двигателя растет); ветвь (В
—
С
) — неустойчивая часть характеристики (с увеличением скольжения момент двигателя уменьшается). Если в цепь двигателя с фазным ротором вводить активное сопротивление, то максимальный момент, не изменяясь по величине, перемещается в область более высоких скольжений (рис. 20, механическая характеристика II). Можно подобрать такое сопротивление в цепи ротора, что максимальный момент будет при пуске.
Рис. 20. Механическая характеристика асинхронного двигателя с фазным ротором
Кривая I для двигателей нормального исполнения показывает, что асинхронный двигатель обладает жесткой характеристикой скорости. Асинхронный двигатель с фазным ротором с сопротивлениями в цепи ротора имеет более мягкую характеристику (кривая II). Увеличивая сопротивление в цепи ротора, можно сдвинуть максимальный момент и сравнять его с пусковым моментом.
Большая Энциклопедия Нефти и Газа
Число — пары — полюс — статор
Число пар полюсов статора всегда равно числу пар полюсов ротора. [1]
Если числа пар полюсов статора и ротора равны, а скорости вращения полей одинаковы ( синхронный режим), то возникает постоянное электромагнитное притяжение разноименных полюсов статора и ротора ( рис. 4 — 2), что вызывает появление электромагнитного момента. Этот момент, называемый синхронным, в среднем равен нулю, если скорость ротора отлична от синхронной. Поэтому синхронный двигатель только с постоянными магнитами не имеет пускового момента. [3]
При числе пар полюсов статора , большем единицы, такой процесс повторяется / раз. [4]
Синхронная скорость поля сос определяется частотой питающей сети и числом пар полюсов статоров машины . Предполагается, что источник питания один, а число пар полюсов для трех статоров одно и то же. [5]
В качестве разгонного двигателя используется асинхронный двигатель на то же число пар полюсов статора , что и синхронный, или двигатель постоянного тока. [6]
Отсюда следует, что номинальную скорость асинхронного двигателя можно изменять путем изменения числа пар полюсов статора . Двигатели, в которых применяется такой способ изменения числа оборотов, называют многоскоростными. [7]
На рис. 10.5, а изображена развернутая схема однослойной обмотки четырехполюсного статора ( число пар полюсов статора р2), на которой секции условно изображены одним витком. На схеме три фазные обмотки: А-X, В-Y, С-Z, каждая состоит из двух последовательно соединенных катушечных групп, в группах — по две секции. [8]
Число оборотов магнитного поля в минуту определяется по формуле: п — -, где Р — число пар полюсов статора , / — частота тока. [10]
Так как скорость вращения потока определяет в основном и число оборотов ротора асинхронного двигателя [ см. формулу ( 187) ], приходим к заключению, что число оборотов асинхронного двигателя при данной частоте переменного тока почти точно обратно пропорционально числу пар полюсов статора . [11]
Трехфазная обмотка статора генератора переменного тока выполняется аналогично статорной обмотке асинхронного двигателя. Число пар полюсов статора всегда равно числу пар полюсов ротора. [12]
Если муфта возбуждается постоянным магнитом, то момент регулируют изменением воздушного зазора, если же на статоре имеется обмотка, то варьируют ток возбуждения. Дшмепт муфгы про порционален числу пар полюсов статора , объему гистерезисного слоя ротора и удельным потерям в нем за цикл перемагничивания. Величина момента практически не зависит от скорости ротора. [14]
Определение точного количества
Выше мы уже описали, как проводить регулировку скоростных показателей, используя число пар полюсов двигателя. А как самостоятельно определить точное количество данных пар?
Скорость оборотов мотора асинхронного типа в большинстве ситуаций интерпретируется как угловая частота оборотов его ротора. Как правило, точное значение показателя указывается на технической табличке, устанавливаемой сбоку на корпусе двигателя. Выражается показатель в оборотах за 1 минуту.
Трехфазные силовые агрегаты поддерживают возможность электропитания и от сетей с одной рабочей фазой, но для реализации такой идеи нужно подсоединить конденсатор. Осуществить это стоит не просто, а одновременно одной или нескольким его намоткам, ориентируясь на уровень напряжения сети питания. Принципиально на конструкцию двигателя это не повлияет.
Если в процессе работы ротор, находясь под нагрузкой за 1 минуту вращается 2760 раз, то его угловая частота будет равняться 289 радиан в секунду. Рассчитать это довольно просто:
2760 * 2пи/60рад.
Получившийся показатель является более техническим, неудобным для восприятия рядовым пользователем. Именно поэтому, рабочие показатели мотора указывают просто и понятно — в оборотах за одну минуту.
Уровень слаженной скорости такого мотора (без учета такого важного значения, как скольжение) равняется 3000 вращений. Это обусловливается тем, что питание стартерных намоток сети обладает частотой в 50 Герц. Каждую рабочую секунду магнитный поток будет осуществлять 50 полноценных перемен. Исходя из этого – 50*60 = 3 тыс. Результативный показатель – синхронная скорость работы электрического двигателя асинхронного типа.
Далее мы рассмотрим о другом методе определения уровня скорости оборотов условного трехфазного агрегата, проведя визуальный осмотр статора. Оценивая внешний вид стационарной детали, расположение медных намоток и точное число пазов, возможно с легкость точно определить количество оборотов мотора. Особенно такая возможность полезна, если в наличии нет такого измерительного устройства, как тахометр.
Дополнительно
Износостойкость электрическая (коммутационная) – число рабочих циклов (включения-отключения) под нагрузкой, на которое рассчитана защитная автоматика. На основании этой величины оценивают срок эксплуатации устройства. Оптимальный выбор – автоматический выключатель, УЗО или автомат, выдерживающий до 10 000 рабочих циклов.
Износостойкость механическая – число рабочих циклов без нагрузки. Этот параметр всегда больше предыдущей характеристики, но на практике не учитывается.
Способы определения характеристик электромотора
Чтобы определить, к какой из этих групп относится двигатель, не нужно разбирать его, как это советуют некоторые специалисты, чтобы обеспечить себе заказ на работу. Дело в том, что разбор электродвигателя может осуществить только мастер достаточной квалификации. На самом же деле достаточно открыть защитную крышку (другое название подшипниковый щит) и найти катушку обмотки. Таких катушек может быть несколько, но достаточно одной. В случае если к валу прикреплены полумуфта или шкив, потребуется снять еще и нижний щит.
Если катушки соединены при помощи деталей, которые мешают рассмотреть информацию, эти детали ни в коем случае нельзя отсоединять. Нужно попробовать определить на глаз соотношение размера катушки и статора.
Статором называется неподвижная часть электромотора, подвижная же имеет название ротор. В зависимости от конструктивных особенностей, в качестве ротора может выступать как сама катушка, так и магниты.
Если катушка закрывает собой половину кольца статора, такой двигатель относится к третьей группе, то есть способен выдавать до 3000 оборотов. Если размер катушки составляет треть от размеров кольца, это мотор второго типа, соответственно, он способен развить 1500 оборотов в минуту. Наконец, если катушка только на четверть закрывает собой кольцо, это первый тип. Электромотор развивает мощность в 1000 оборотов.
Существует еще один способ определения частоты вращения вала роторной части. Для этого также нужно снять крышку и найти верхнюю часть обмотки. По расположению секций обмотки и определяется скорость. Обычно внешняя секция занимает 12 пазов. Если сосчитать общее количество пазов и разделить на 12, можно получить число полюсов. Если число полюсов равно 2, двигатель имеет скорость вращения около 3000 об/мин. Если полюсов получилось 4, это соответствует 1500 оборотам в минуту. Если 6, то 1000 об/мин. Если 8, то 700 оборотов.
Третий способ определения количества оборотов внимательно осмотреть бирку на самом двигателе. Цифра на маркировке в конце и соответствует числу полюсов. Например, для маркировки АИР160S6 последняя цифра 6 указывает, сколько полюсов использует катушка.
Проще же всего измерить число оборотов специальным прибором тахометром. Но в силу узкой специализации применения данный способ нельзя рассматривать как общедоступный. Таким образом, даже если не сохранилось никакой технической документации, существует как минимум 4 способа определить число оборотов электрического мотора.
Как определить частоту вращения электродвигателя?
Очевидно, что правильная эксплуатация любой электрической машины предполагает соответствие такого важного ее технического параметра как частота вращения условиям эксплуатации.
Все основные параметры асинхронного электродвигателя изготовителем указываются на металлической бирке – шильдике, прикрепленной к его корпусу. И конечно, в приведенных технических данных обязательно присутствует информация о частоте вращения при номинальной нагрузке.
Однако, на практике, совсем нередки случаи, когда необходимо определить частоту вращения двигателя с отсутствующим шильдиком или с нечитаемыми – стершимися надписями на нем.
Конечно, в таких случаях опытный мастер-электроприводчик, наверняка сможет определить частоту вращения, но у начинающих специалистов-электриков, занимающихся обслуживанием электрического оборудования при решении этого вопроса могут возникнуть некоторые затруднения.
Проще всего определить скорость вращения вала работающего “асинхронника” тахометром. Но, учитывая, что ввиду узкой специфики использования, наличие этого измерительного прибора – большая редкость, данный метод здесь не рассматривается.
Надеемся, предложенный ниже способ окажется полезным. Он применим для асинхронных электродвигателей небольшой и средней мощности, имеющих однослойные статорные обмотки.
Итак, в нашем случае определение частоты вращения электродвигателя предполагает осмотр его статорной обмотки. Поэтому, с двигателя потребуется снять крышку (пошипниковый щит). Если на его валу закреплены шкив или полумуфта для передачи движения, то рекомендуем снять задний щит.
Сняв крышку и крыльчатку вентилятора с вала, следует, открутив винты, снять задний подшипниковый щит, после чего осмотреть торцевую часть статорной обмотки. Далее, надо посчитать количество пазов, занимаемых секциями одной катушки.
Общее количество пазов сердечника, разделенное на количество пазов, занимаемых секциями одной катушки (частное) составит число полюсов. Зная его значение, определяем частоту вращения асинхронного электродвигателя:
2 – 3000 об/мин; 4 – 1500 об/мин; 6 – 1000 об/мин.
Здесь стоит учесть одну особенность асинхронных двигателей – несоответствие скорости вращения магнитного поля и вращения ротора, поэтому скорость может составлять 940 обмин вместо 1000 или 2940 об/мин вместо 3000.
Как видно, особой сложностью этот способ определения частоты вращения по обмотке не отличается, однако, может быть упрощен; потребуется визуально определить какая часть окружности сердечника статора, занимается секциями одной катушки:
Занятая секциями одной катушки ½ часть сердечника статора двигателя свидетельствует о его частоте вращения 3000 обмин, ⅓ – 1500 об/мин, ¼ – 1000 об/мин.
>Как определить мощность и обороты электродвигателя без его разборки.
Как узнать характеристики электродвигателя без маркировки.
Расчет количества оборотов асинхронного двигателя
Распространенным двигателем на станках и подъемных устройствах является двигатель с короткозамкнутым ротором, поэтому пример для расчета следует брать для него. Сетевое напряжение поступает на статорную обмотку. Обмотки смещены друг от друга на 120 градусов. Возникшее поле электромагнитной индукции возбуждает электрический ток в обмотке. Ротор начинает работать под действием ЭМС. Основной характеристикой работы двигателя является число оборотов в минуту. Рассчитываем это значение:
n = 60 f / p, обор / мин;
где f – частота сети, герц, р – количество полюсов статора (в парах).
На корпусе электродвигателя имеется табличка с техническими данными. Если ее нет, то можно самому рассчитать число оборотов вала оборудования по другим имеющимся данным. Расчет производится тремя способами.
- Расчет числа катушек, которое сравнивается с нормами для разного напряжения, следует по таблице:
- Расчет скорости работы по шагу диаметра обмотки по формуле:
2 p = Z 1 / y, где 2р – количество полюсов, Z 1 – число пазов в статоре, у – шаг обмотки.
Выбираем из таблицы подходящие обороты двигателя:
- Высчитываем количество полюсов по параметрам сердечника по формуле:
2p = 0,35 Z 1 b / h или 2 p = 0,5 D i / h,
где 2р – количество полюсов, Z 1 – число пазов, b – размер зуба, см, h – высота спинки, см, D i – диаметр по зубцам, см.
По результатам расчета и индукции следует число витков обмотки, сравнивается со значениями мотора по паспорту.
Что это и как устроено
Автоматы позволяют облегчить быт путем защиты приборов от сгорания. Резкие изменения сетевых параметров вызывают замыкание или перегрузки, к которым устойчиво не каждое оборудование. Небольшие устройства с проводниками отключают участок при резких скачках сетевых показателей и спасают электроприборы от неминуемой гибели.
Модульные автоматы состоят из однотипных по размерам и функциональности блоков. Каждая часть — это 1 полюс. Собирают 2-, 3- и 4-полюсные комбинации. Количество полюсов автоматического выключателя зависит от параметров электросети.
Устройство модульного автомата:
- электромагнитная катушка;
- устройство гашения дуги;
- контакты;
- биметаллическая пластина;
- винтовые зажимы;
- механизм расцепителя;
- ручка.
Конструкции практически неотличимы. Стоимость и надежность зависят от производителя, применяющего, в свою очередь, более или менее качественные материалы. В устройствах могут быть разные электромагниты и иначе устроенная теплозащита, система гашения дуги, прочие элементы одинаковы.
Измерение скорости вращения
Измерение скорости вращения валов, шестерен, колес и других элементов, осуществляется, как правило, при помощи электронных тахометров. Типовая схема электронного тахометра приведена на рис. 26.
Тахометры измеряют скорость вращения n с размерностью . Уже первый взгляд на эту размерность позволяет понять, что тахометр должен выполнять два вида измерений одновременно. Во-первых, измерять количество оборотов (вала, шестерни, колеса и т.п.). Во-вторых, измерять время. Для выполнения таких измерений электронный тахометр (рис. 26) содержат электронный секундомер, фотоэлектрический датчик и логическое устройство ЛУ.
С устройством и работой электронного секундомера мы познакомились в предыдущем разделе. Теперь познакомимся с устройством и работой фотоэлектрического датчика. Он состоит из светодиода – излучателя СД, фотодиода – приемника ФД и формирователя электрических импульсов ФС1. Светодиод СД излучает свет на фоточувствительную поверхность фотодиода приемника ФД. При этом сопротивление фотодиода падает. Если на линии светового потока между светодиодом СД и фотодиодом ФД поместить непрозрачный материал, то сопротивление фотодиода ФД резко возрастет.
Рис. 26. Функциональная схема электронного тахометра
Это свойство фотоэлектрического датчика широко используется в технике и в измерениях. Для измерения скорости вращения между оптопарой – (светодиодом излучателем и фотодиодом приемником), помещают диск 1 с отверстиями, вращающийся на валу 2 (рис. 26). В процессе вращения вала 2 отверстия в диске будут прерывать световой поток между светодиодом СД и фотодиодом ФД. При этом сопротивление фотодиода ФД будет непрерывно изменяться синхронно с частотой вращения вала. Формирователь импульсов ФС1 реагирует на изменения сопротивления фотодиода, преобразуя каждое из их в стандартные по напряжению и длительности прямоугольные электрические импульсы на своем выходе (см. рис. 27, (а). Чем быстрее вращается диск 2, тем больше частота следования импульсов на выходе формирователя ФС1.
Теперь познакомимся с работой логического устройства ЛУ (рис. 26). Логическое устройство имеет два входа и один выход. Принцип его работы можно сформулировать как «2-И». То есть, если и на первый и на второй входы логического устройства ЛУ подано напряжение (условие «2-И» выполняется), то и на его выходе тоже будет напряжение. Если хотя бы на одном из входов ЛУ напряжения нет (условие два «И» не выполняется), то и на его выходе напряжения не будет. Данный принцип работы ЛУ хорошо иллюстрируют графики, представленные на рис. 27.
Рис. 27. Графики электрических импульсов при работе схемы электронного тахометра, (А) – импульсы на выходе формирователя ФС1 в точке А; (Б) – импульсы периодов времени счета (с выхода делительной декады ДД4); (В) – импульсы на выходе логического устройства (на входе в СчД1); (Г) – импульсы, обнуляющие счетные декады в момент начала нового периода счета
В процессе измерения тахометром скорости вращения вала 2 (рис. 26) на выходе формирователя ФС1в точке (А) вырабатываются электрические импульсы с частотой следования отверстий в диске 1. Эти импульсы подаются на первый вход логического устройства ЛУ. Одновременно с этим на второй вход ЛУ в точку (Б) от выхода делительной декады ДД4 поступают импульсы периодов времени счета.
Глядя на рис. 27. не трудно видеть, что условие «2-И» может периодически выполняться только в момент, когда на второй вход ЛУ в точку (Б) в течение 1 секунды подается напряжение 5 вольт. В это же время с выхода формирователя ФС1на первый вход ЛУ в точку (А) поступают электрические импульсы, вызванные вращением диска 2. Таким образом, на выходе логического устройства ЛУ в точке (В) формируются прямоугольные электрические импульсы, которые по внешнему виду повторяют импульсы, поступающие от формирователя ФС1. Они поступают на счетные декады СчД, поэтому этот режим называется «счет».
После периода счета импульсов, в течение следующего периода времени продолжительностью в 1 секунду, напряжение на втором входе ЛУ становится равным нулю. На выходе ЛУ напряжение тоже становится равным нулю, поскольку принцип «2-И» не выполняется. Счет не возможен. На счетных декадах в течение одной секунды отображается результат счета. Этот режим называется «индикация».
После режима «индикация» автоматическое устройство управления сбросом УУС (рис. 26) вырабатывает на своем выходе в точке (Г) короткий электрический импульс, который подается одновременно на входы обнулениявсехсчетных декад. Счетные декады обнуляются, и начинается новый режим счета. Таким образом, режимы «счет» и «индикация» циклически повторяются.
Чтобы по показаниям электронного тахометра определить скорость вращения вала, шестерни и пр., используют формулу:
(2.18)
где: N – результат счета на дисплеях счетных декад; k – количество отверстий в диске датчика; t – период времени счета.
Например, на дисплеях счетных декад электронного тахометра отобразилось число 2400. В диске датчика 80 отверстий. Период времени счета равен 1 секунде. В этом случае:
об/сек.
Если в окружности диска сделать 60 отверстий, а период времени счета будет равен 1 секунде, то с учетом того, что в 1 минуте 60 секунд, электронный тахометр будут показывать скорость вращения в размерности .
Абсолютная погрешность Δn измерения числа оборотов электронным тахометром вычисляется по следующей формуле:
, (2.19)
где: Δtизм – абсолютная погрешность длительности импульса времени (от нестабильности генератора опорных частот); nх – измеренная скорость вращения; tизм – длительность импульса времени (в нашем примере он равен 1 секунде).
Относительную погрешность измерения числа оборотов электронным тахометром определим по формуле:
(2.20)
Например, необходимо определить абсолютную и относительную погрешности измерения числа оборотов электронным тахометром, если он показывает величину измеренной скорости вращения nх = 1000 об/мин, а абсолютная погрешность длительности импульса времени Δtизм = 0,0001 с. Используя формулу (2.19) определим абсолютную погрешность измерения числа оборотов электронным тахометром:
Теги
обмоток статора сетевымего статор.в статор уложенона статоре.поток статора одинна статор.пазов статора разделитеполюсов статора увеличиваютна статоре четыренапример статор имеетесли ротор подсобой ротор.название ротор.качестве ротора можетвала роторной части.обращении ротора вобращений ротора которыхпоказателя ротора.вращением ротора иже ротор вращаетсясетевым током спостоянного тока переменного тока постоянного тока Сгенерированный ток идвижения токов вдвижения токов вперемещения тока ввариации тока вэлектрического тока в
делению