Синхронным компенсатором называется синхронный двигатель облегчённой конструкции, предназначенный для работы на холостом ходу. Основные потребители электрической энергии, кроме активной мощности, потребляют от генераторов системы реактивную мощность. К числу потребителей, требующих большие намагничивающие реактивные токи для создания и поддержания магнитного потока, относятся асинхронные двигатели, трансформаторы, индукционные печи и другие. В связи с этим распределительные сети обычно работают с отстающим током.
Реактивная мощность, вырабатываемая генератором, получается с наименьшими затратами. Однако передача реактивной мощности от генераторов связана с дополнительными потерями в трансформаторах и линиях передач. Поэтому для получения реактивной мощности становится экономически выгодным применение синхронных компенсаторов, располагаемых на узловых подстанциях системы или непосредственно у потребителей.
Синхронные двигатели благодаря возбуждению постоянным током они могут работать с cos = 1 и не потребляют при этом реактивной мощности из сети, а при работе, с перевозбуждением отдают реактивную мощность в сеть. В результате улучшается коэффициент мощности сети и уменьшаются падение напряжения и потери в ней, а также повышается коэффициент мощности генераторов, работающих на электростанциях.
Синхронные компенсаторы предназначаются для компенсации коэффициента мощности сети и поддержания нормального уровня напряжения сети в районах сосредоточения потребительских нагрузок.
В перевозбужденном режиме ток опережает напряжение сети, т. е. является по отношению к этому напряжению емкостным, а в недовозбужденных — отстающим, индуктивным. В таком режиме синхронная машина превращается в компенсатор — в генератор реактивного тока.
Нормальным являемся перевозбужденный режим работы синхронного компенсатора, когда он отдает в сеть реактивную мощность.
Синхронные компенсаторы лишены приводных двигателей и с точки зрения режима своей работы в сущности являются синхронными двигателями, работающими на холостом ходу.
Для этого каждый синхронный компенсатор снабжается автоматическим регулятором возбуждения или напряжения, который регулирует величину его тока возбуждения так, что напряжение на зажимах компенсатора остается постоянным.
Для того чтобы улучшить коэффициент мощности и соответственно уменьшить угол сдвига между током и напряжением от значения φсв до φк нужна реактивная мощность:
где Р — средняя активная мощность, квар; φсв — сдвиг фаз, соответствующий средневзвешенному коэффициенту мощности; φк — сдвиг фаз, который должен быть получен после компенсации; а — коэффициент, равный около 0,9, вводимый в расчеты с целью учета возможного повышения коэффициента мощности, без установки компенсирующих устройств.
Помимо компенсации реактивных токов индуктивных промышленных нагрузок, синхронные компенсаторы необходимы на ЛЭП. В длинных ЛЭП при малых нагрузках преобладает емкость линии, и они работают с опережающим током. Для того чтобы компенсировать этот ток, синхронный компенсатор должен работать с отстающим током, т. е. недовозбужденным.
При значительной нагрузке ЛЭП, когда преобладает индуктивность потребителей электроэнергии, ЛЭП работает с отстающим током. В этом случае синхронный компенсатор должен работать с опережающим током, т. е. перевозбужденным.
Изменение нагрузки на ЛЭП вызывает изменение потоков реактивных мощностей по величине и фазе, приводит к значительным колебаниям напряжения в линии. В связи с этим возникает необходимость его регулирования.
Синхронные компенсаторы обычно устанавливают на районных подстанциях.
Для регулирования напряжения в конце или середине транзитных ЛЭП могут быть созданы промежуточные подстанции с синхронными компенсаторами, которые должны регулировать либо поддерживать напряжение неизменным.
Работа таких синхронных компенсаторов автоматизируется, в связи с чем создается возможность плавного автоматического регулирования величины вырабатываемой реактивной мощности и напряжения.
Для осуществления асинхронного пуска все синхронные компенсаторы снабжаются пусковыми обмотками в полюсных наконечниках или их полюсы делаются массивными. При этом используется способ прямого, а в необходимых случаях — способ реакторного пуска.
В некоторых случаях мощные компенсаторы пускаются в ход также с помощью пусковых фазных асинхронных двигателей, укрепляемых с ними на одном валу. Для синхронизации с сетью при этом обычно используется метод самосинхронизации.
Так как синхронные компенсаторы не развивают активной мощности, то вопрос о статической устойчивости работы для них теряет остроту. Поэтому они изготовляются с меньшим воздушным зазором, чем генераторы и двигатели, Уменьшение зазора позволяет облегчить обмотку возбуждения и удешевить машину.
Номинальная полная мощность синхронного компенсатора соответствует его работе с перевозбуждением, т.е. номинальной мощностью синхронного компенсатора считается его реактивная мощность при опережающем токе, которую он может длительно нести в рабочем режиме.
Наибольшие значения тока и мощности в недовозбужденном режиме получаются при работе в реактивном режиме.
В большинстве случаев в недовозбужденном режиме требуются меньшие мощности, чем в перевозбужденном, но в некоторых случаях необходима большая мощность. Этого можно достигнуть увеличением зазора, однако это приводит к удорожанию машины, и поэтому в последнее время ставится вопрос об использовании режима с отрицательным током возбуждения. Поскольку синхронный компенсатор по активной мощности загружен только потерями, то, согласно он может работать устойчиво также с небольшим отрицательным возбуждением.
В ряде случаев в маловодные периоды для работы в режиме компенсаторов используются также генераторы гидроэлектростанций.
В конструктивном отношении компенсаторы принципиально не отличаются от синхронных генераторов. Они имеют такую же магнитную систему, систему возбуждения, охлаждения и др. Все синхронные компенсаторы средней мощности имеют воздушное охлаждение и выполняются с возбудителем и подвозбудителем.
В связи с тем, что синхронные компенсаторы не предназначены для выполнения механической работы и не несут активной нагрузки на валу, они имеют механически облегченную конструкцию. Компенсаторы выполняются как сравнительно тихоходные машины (1000 — 600 об/мин) с горизонтальным валом и явнополюсным ротором.
В качестве синхронного компенсатора может быть использован генератор, работающий вхолостую при соответствующем возбуждении. В перевозбужденном генераторе появляется уравнительный ток, являющийся чисто индуктивным относительно напряжения генератора и чисто емкостным относительно сети.
Следует иметь в виду, что перевозбужденная синхронная машина независимо от того, работает ли она генератором или двигателем, может рассматриваться относительно сети как емкость, а недовозбужденная — как индуктивность.
Для того чтобы перевести генератор, включенный в сеть, в режим синхронного компенсатора, достаточно закрыть доступ пара (или воды) в турбину. В таком режиме перевозбужденный турбогенератор начинает потреблять небольшую активную мощность из сети только для покрытия потерь вращения (механических и электрических) и отдает реактивную мощность в сеть.
В режиме синхронного компенсатора генератор может работать длительное время и зависит лишь от условий работы турбины.
При необходимости турбогенератор может быть использован в качестве синхронного компенсатора как при вращающейся турбине (вместе с турбиной), так и при отсоединенной, т. е. при разобранной муфте сочленения.
Вращение паровой турбины со стороны генератора, перешедшего в двигательный режим, может вызвать перегрев хвостовой части турбины.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Синхронные компенсаторы
Синхронным компенсатором называют синхронную машину, работающую в двигательном режиме без нагрузки на валу при изменяющемся токе возбуждения. Синхронный компенсатор в зависимости от тока возбуждения может выдавать реактивную мощность в сеть или потреблять ее из сети. Общий вид синхронного компенсатора представлен на рис.1.
Рис.1. Общий вид синхронного компенсатора с водородным охлаждением при открытой его установке на подстанции энергосистемы
В конструктивном отношении он похож на турбогенератор, однако выполняется на среднюю частоту вращения (750-1000 об/мин) Ротор синхронного компенсатора изготовляется явнополюсным. Статор в конструктивном отношении подобен статору турбогенератора.
Синхронный компенсатор характеризуется номинальной мощностью, напряжением и током статора, частотой, номинальным током ротора и потерями в номинальном режиме.
Номинальное напряжение
Номинальное напряжение синхронного компенсатора в соответствии с ГОСТ устанавливается на 5 или 10% выше соответствующего номинального напряжения электрической сети.
Номинальная мощность
Номинальная мощность синхронного компенсатора определяется как длительно допустимая нагрузка при номинальном напряжении, номинальных параметрах охлаждающей среды.
Номинальные мощности синхронных компенсаторов определяются в киловольт-амперах и должны соответствовать ряду мощностей согласно ГОСТ 609-84. По этому ГОСТ минимальная мощность синхронного компенсатора определена в 2800 кВА. Максимальная мощность компенсаторов, выпускаемых в прошлом в СССР, равнялась 160 MBА.
Номинальный ток статора
Номинальный ток статора определяется на основании значений номинальной мощности и номинального напряжения.
Номинальный ток ротора
Потери активной мощности при номинальных условиях охлаждения для синхронных компенсаторов находятся в пределах 1,5-2,5%.
Современные электрические нагрузки характеризуются значительным потреблением реактивной мощности. Рост потребления реактивной мощности связан в первую очередь с широким применением электроустановок, в которых для преобразования энергии используются магнитные поля (электродвигатели, трансформаторы и т. п.). Значительную реактивную составляющую имеют токи преобразовательных устройств с ртутными вентилями и тиристорами, люминесцентное освещение и др. В связи с этим электрические сети загружаются реактивной составляющей тока, что сопровождается понижением напряжения и большими потерями мощности при передаче и распределении электроэнергии.
Если в центре нагрузок включить синхронный компенсатор, он, генерируя реактивную мощность, необходимую потребителям, позволит разгрузить линии, соединяющие электростанции с нагрузкой, от реактивного тока, что улучшит условия работы сети в целом При этом синхронный компенсатор должен работать с перевозбуждением в режиме выдачи реактивной мощности. Синхронные компенсаторы устанавливаются также на подстанциях электропередач, где с их помощью обеспечиваются лучшее распределение напряжения вдоль линий и повышение устойчивости параллельной работы. При этом в зависимости от режима работы электропередачи может потребоваться работа компенсатора как в режиме генерации, так и в режиме потребления реактивной мощности.
В режиме разгрузки линий электропередачи высокого и сверхвысокого напряжений, количество которых в современных энергосистемах значительно, большая некомпенсированная зарядная мощность приводит к повышению напряжения у потребителей. В этот период синхронный компенсатор переводят в режим потребления реактивной мощности.
Реактивная мощность, генерируемая или потребляемая синхронным компенсатором, зависит от тока возбуждения.
При анализе работы синхронного компенсатора будем считать, что он включен в мощную сеть, вследствие чего при изменении тока статора напряжение на зажимах практически не меняется (рис.2).
По отношению к вектору напряжения Uк указанный ток будет отстающим на 90°. Компенсатор при этом отдает реактивную мощность в сеть.
При недовозбуждении машины, когда Ек
Источник
Электрические машины
МОиН РФ
Омский государственный технический университет
Кафедра «Теоретическая и общая электротехника»
Электрические машины
ЛЕКЦИЯ: “
Синхронные двигатели: особенности работы; способы пуска; угловые иU-образные характеристики синхронных двигателей; рабочие характеристики синхронных двигателей; синхронные компенсаторы.”
Омск 2005
1. Основные термины и определения.
1. Рабочие характеристики вращающегося электродвигателя (рабочие характеристики)
— зависимости подводимой мощности, тока в обмотке якоря, частоты вращения, коэффициента полезного действия вращающегося электродвигателя от полезной мощности на валу при неизменных напряжении питающей сети и внешних сопротивлениях в цепях обмоток.
Примечания: Коэффициент мощности определяется только для вращающихся электродвигателей переменного тока. Рабочие характеристики вращающихся электродвигателей переменного тока определяются при неизменной частоте тока питающей сети
2.
Входной момент в синхронизм —
максимальный вращающий момент нагрузки, при котором синхронный двигатель, подключенный к питающей сети с номинальными напряжением и частотой может войти в синхронизм при подаче возбуждения
3. Добавочные потери вращающейся электрической машины (добавочные потери)
— потери вращающейся электрической машины, возникающие в результате наличия высших гармонических в кривых намагничивающей силы обмоток, потока рассеяния обмоток, пульсации магнитного потока в воздушном зазоре, вытеснения тока в проводниках и других неосновных электромагнитных процессов
4. Постоянные потери вращающейся электрической машины (постоянные потери)
— потери вращающейся электрической машины, практически не зависящие от нагрузки, если напряжение и частота вращения при этом остаются неизменны
5. Основные электрические потери вращающейся электрической машины (
основные электрические потери) — потери в обмотках вращающейся электрической машины, определяемые как произведение сопротивления постоянному току на квадрат тока в обмотке, и электрические потери в скользящих контактах
6. Основные магнитные потери вращающейся электрической машины
(основные магнитные потери) — потери от гистерезиса и вихревых потоков, возникающие в ферромагнитных участках магнитной цепи во вращающейся электрической машине при их перемагничивании основным магнитным потоком
7. Механические потери вращающейся электрической машины (механические потери)
— потери вращающейся электрической машины, возникающие в результате трения в подшипниках, трения щеток о коллектор или контактные кольца, трения вращающихся частей о воздух, вентиляционные и другие потери на трение
8. Асинхронный пуск вращающегося электродвигателя переменного тока (асинхронный пуск)
— пуск вращающегося двигателя переменного тока непосредственным или косвенным подключением его к питающей сети при замкнутой накоротко или на сопротивление вторичной обмотке
9.
Частотный пуск вращающегося электродвигателя —
пуск вращающегося электродвигателя переменного тока с подачей питания от источника со значительно пониженной частотой, постепенно повышаемой по мере разворачивания двигателя
10. Электромашинный компенсатор (компенсатор)
— синхронная машина, предназначенная для генерирования или потребления реактивной мощности
2. Особенности двигательного режима синхронной машины
Ротор синхронного двигателя вращается с той же скоростью, что и магнитное поле машины. Синхронное вращение можно объяснить взаимодействием полюсов ротора и полюсов результирующего вращающегося поля. Вращающееся магнитное поле вследствие взаимодействия полей статора и ротора увлекает за собой ротор. При нагрузке двигателя под воздействием тормозного момента его ротор, продолжая вращаться синхронно, смещается относительно результирующего поля машины на угол θ
. Чем больше нагрузка на валу, тем больше угол
θ
. Под углом
θ
, как и раньше, понимается угол между осью полюсов ротора и осью результирующего поля. Но в отличие от генератора, где ротор опережает поле, в двигателе он отстает от поля, т. е. является ведомым, поэтому для двигателей этот угол принимают отрицательным.
На рис. 2 даны две векторные диаграммы, одна из которых (рис. 2, а) соответствует режиму работы генератора параллельно с сетью, а другая (рис. 2,6) — двигательному режиму. На рис. 2, а ротор опережает результирующее поле (Е
0 опережает
U
(г)), а на рис. 2,6 отстает от него (
Е
0 отстает от
U(
Д)). Под
U
(г) и
U(Д)
понимаются напряжения на выводах машины, уравновешивающие напряжения сети
U
(г)=—
U
C и
U(Д)
=—
U
C.
| Рис. 1. Распределение магнитного поля в воздушном зазоре синхронного двигателя при нагрузке | Рис. 2. Упрощенные векторные диаграммы синхронной машины для генераторного (а) и двигательного (б) режимов |
На рис. 2,6 в соответствии с изменением фазы изменяется фаза тока I
. Мощность, отдаваемая машиной в сеть, будет теперь отрицательной: , а мощность, поглощаемая из сети, положительной: . Эти неравенства подтверждают, что машина в данном случае (когда
θ
<0) будет работать двигателем. При построении векторных диаграмм синхронных двигателей принято фазу тока определять по отношению к вектору напряжения сети
U
C. Построение векторных диаграмм синхронного двигателя при известных
U
(Д),
I
и угле между ними выполняется так же, как и для генератора (левая часть рис. 3), исходя из уравнения
(1)
Если при построении диаграммы исходить из известного напряжения сети U
С =
U
, то уравнение (1) будет иметь вид
(2)
Диаграмма по уравнению (2) построена в правой части рис. 3, причем для опережающего тока якоря. На рис. 3 показаны векторы МДС обмотки возбуждения и составляющих реакции якоря.
Рис. 3. Векторная диаграмма явнополюсного синхронного двигателя
Первый вектор отложен в сторону опережения ЭДС E
Q на 90°, а два других — в фазе с токами
I
d и
I
q. Из рис. 3 видно, что продольная реакция якоря в синхронном двигателе при опережающем токе действует размагничивающим образом (
F
ad направлен против
F
B) . Аналогично можно показать, что при отстающем токе продольная реакция якоря будет оказывать намагничивающее действие.
Эти выводы расходятся с выводами о влиянии реакции якоря на поле возбуждения, которые были получены для генератора. Однако это расхождение не вызвано различием в физических явлениях, а связано с различным отсчетом фазы тока в двигателе и генераторе. В двигателе фаза тока определяется по отношению к напряжению сети , а в генераторе — по отношению к собственному напряжению, находящемуся в противофазе с напряжением U
C. Поэтому опережающему току в двигательном режиме соответствует отстающий ток в генераторном режиме.
3. Угловые и
U-образные характеристики синхронного двигателя
Синхронный двигатель потребляет электрическую мощность Р
1 из сети. Часть этой мощности расходуется
на электрические потери в обмотке якоряP
эа и
магнитные потериР
M в статоре, а остальная ее часть передается вращающимся магнитным полем от статора к ротору. Эта мощность называется электромагнитной. Электромагнитная мощность
РЭМ
преобразуется в механическую, развиваемую ротором. Частично мощность
РЭМ
расходуется на покрытие
механическихР
MX и
добавочныхР
Д потерь. Оставшаяся ее часть
Р
2 является полезной механической мощностью на валу двигателя. Указанное преобразование мощности в синхронном двигателе показано на рис. 4.
Рис. 4. Энергетическая диаграмма синхронного двигателя
Уравнения для электромагнитной мощности синхронного двигателя можно получить из векторных диаграмм. Например, для явнополюсного двигателя электромагнитная мощность равна:
(3)
В неявнополюсном двигателе x
q=
х
d, и поэтому вторая составляющая
Р»
будет отсутствовать. Электромагнитный момент получим, если (3) разделим на угловую скорость поля и ротора :
(4)
В двигателе электромагнитный вращающий момент направлен в сторону вращения, тогда как в генераторе — против вращения. В явнополюсном двигателе за счет второй составляющей М»
(реактивного момента) вращающий момент может создаваться и при отсутствии возбуждения
I
B=0 (
E
0=0). Напомним, что в (3) и (4) угол
θ
следует принимать отрицательным.
Рис. 5. Угловая характеристика электромагнитного момента явнополюсного синхронного двигателя
На рис. 5 показана угловая характеристика M=f(θ)
для двигательного режима (нижняя часть). Для сопоставления там же приведена аналогичная характеристика для генератора. Утолщенная часть кривой соответствует устойчивой части характеристики. Величина
МMAX
характеризует перегрузочную способность машины. Отношение
МMAX
/
МHOM
называется кратностью максимального момента. Согласно ГОСТ 183-74 эта кратность должна быть не менее 1,65. Из (4) видно, что
МMAX
в синхронных двигателях прямо пропорционален подводимому напряжению
U
и ЭДС
E
0. Это относится как к неявнополюсному двигателю, так и с некоторым приближением к возбужденному явнополюсному двигателю, так как у последнего
МMAX
определяется главным образом первой составляющей. Зависимость
M=f(θ)
, представляющая собой угловую характеристику синхронного двигателя, является его механической характеристикой. При номинальной нагрузке
θ
HOM=20÷300.
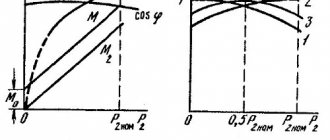
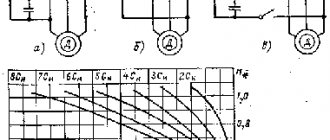
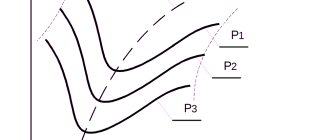
U-образные характеристики двигателя могут быть построены по векторным диаграммам. Более точные результаты получаются из векторных диаграмм с учетом насыщения. U
-образные характеристики для различных значений
Р
(или
М
) представлены на рис. 7. Как следует из сопоставления рис. 6 и 7, при работе с опережающим током двигатель перевозбужден, а при работе с отстающим током недовозбужден.
Рис. 6. Векторные диаграммы ненасыщенного неявнополюсного двигателя при Р=const
Рис. 7. Зависимости I=f(IB)
и cos
φ=f(IB)
для синхронного двигателя при различных значениях
Р(М)
: 1 — при
P1(M1)
; 2 — при
Р
2>
Р
1 (
М
2>
М
1); 3 — при
Р
3>
Р
2 (
М
3>
М
2)
При перевозбуждении двигатель генерирует реактивную мощность непосредственно у потребителя, что способствует повышению cosφ
сети. Это позволяет снизить реактивную мощность, вырабатываемую синхронными генераторами на электрических станциях, и уменьшить потери в линиях электропередачи. Возможность генерировать реактивную мощность выгодно отличает синхронные двигатели от асинхронных, которые потребляют реактивную мощность для возбуждения. Поэтому синхронные двигатели проектируются для работы при номинальной мощности с перевозбуждением (с опережающим током) и cos
φHOM
=0,9. Работа с перевозбуждением предпочтительна также и для повышения максимального момента двигателя.
В соответствии с приведенными U
-образными характеристиками на рис. 7 построены зависимости cos
φ=f(IB)
при различных значениях
М
. Отсюда следует, что при любых нагрузках на валу синхронные двигатели могут работать с различными значениями cos
φ
, в том числе и с cos
φ
=1. Достигается это изменением тока в обмотке возбуждения.
4. Рабочие характеристики синхронного двигателя
Рабочие характеристики синхронного двигателя могут быть получены или при I
B=const, или при cos
φ
=
const
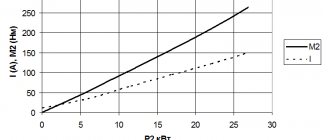
. На рис..8 показаны рабочие характеристики М,
I
B,
Р
1,
I
,
η=f(P2)
при условии
U=const
и cos
φ
=cos
φHOM=const
.
Рис. 8. Рабочие характеристики синхронного двигателя при cosφ
=
const
Зависимость момента на валу М2≈М
от полезной мощности имеет линейный характер, так как скорость
ω1=const. Как следует из рис. 7, для поддержания cos
φ=
const
с увеличением нагрузки ток возбуждения
I
B следует увеличивать.
При холостом ходе (Р2=0
) двигатель потребляет из сети активную мощность, необходимую для покрытия потерь (механических и магнитных) внутри машины. Поэтому при холостом ходе ток статора не будет равен нулю. С возрастанием
Р
2 будет увеличиваться
Р
1, а следовательно, и ток ( где включает в себя как потери холостого хода — постоянные потери, так и электрические потери в обмотке якоря).
Зависимость КПД от Р
2 не отличается от таковой для других машин. Обычно синхронные двигатели работают с постоянной скоростью. При необходимости регулировать скорость применяют частотный способ, при котором изменяют скорость поля, а следовательно, и скорость ротора.
5. Пуск синхронного двигателя
Синхронный двигатель непосредственным включением обмотки статора (якоря) в сеть переменного тока не может быть запущен в ход.
Объясняется это следующим образом. При включении многофазной обмотки якоря в сеть практически мгновенно образуется вращающееся магнитное поле, частота вращения которого n
п зависит oт частоты
f
протекающего по обмоткам тока (
n
п=60
f
/
р
). «Полюсы» этого поля, перемещаясь в пространстве, будут взаимодействовать то с одноименными, то с разноименными полюсами неподвижного, возбужденного ротора. В соответствии с этим будет меняться направление вращающего момента, действующего на ротор. В течение половины периода изменения тока в обмотках момент будет направлен в одну сторону, а в течение другой половины — в противоположную.
Пуск мог бы произойти, если бы ротор разогнался до установившейся скорости в течение полупериода, когда вращающий момент не меняет свой знак. При частоте 50 Гц полупериод равен 0,01 с. Из-за механической инерции за такое время роторы практически всех синхронных двигателей развернуться не смогут.
Существует несколько способов пуска двигателя. Эти способы заключаются в том, что в процессе пуска ротор двигателя разгоняется до скорости вращающегося поля, после чего двигатель входит в синхронизм
и начинает работать как синхронный. Применение получили пуск с помощью разгонного двигателя, частотный пуск и асинхронный пуск. Наибольшее распространение имеет асинхронный пуск.
Пуск с помощью разгонного двигателя
состоит в том, что посторонним (разгонным) двигателем ротор синхронной машины разворачивается до номинальной скорости. Обмотка возбуждения включена в сеть постоянного тока, а обмотка статора разомкнута. Затем производят включение ее на параллельную работу с сетью. После подключения машины к сети разгонный двигатель механически отсоединяют от вала синхронной машины, и последняя переходит в двигательный режим. Мощность разгонного двигателя невелика и составляет 10—20 % номинальной мощности синхронного двигателя. Эта мощность покрывает мощность механических и магнитных потерь в синхронном двигателе.
Частотный пуск
применяется в том случае, если синхронный двигатель подключен к автономному источнику, частоту напряжения которого можно изменять от нуля до номинальной. Если плавно повышать частоту питающего напряжения, то соответственно будет увеличиваться скорость магнитного поля. Ротор, следуя за полем, постепенно будет повышать свою скорость от нуля до номинальной. В процессе пуска машина все время работает в синхронном режиме.
Асинхронный пуск
аналогичен пуску асинхронного двигателя. Для этого на роторе в полюсных наконечниках размещают пусковую обмотку. Эта обмотка выполняется по типу короткозамкнутой обмотки ротора асинхронного двигателя и имеет то же устройство, что и демпферная обмотка генератора. При пуске трехфазная обмотка статора включается в сеть. Ток, который будет протекать по этой обмотке, создаст вращающееся магнитное поле. Оно наведет в пусковой обмотке ротора ЭДС и ток. В результате взаимодействия тока пусковой обмотки ротора с вращающимся магнитным полем образуется момент, под действием которого ротор придет во вращение и развернется до скорости, близкой к скорости поля
ω1
. Вращение его будет происходить со скольжением, которое зависит от нагрузки на валу (
ω
<
ω1
).
Вхождение в синхронизм достигается после включения постоянного тока в обмотку возбуждения за счет возникающего при этом синхронизирующего момента. С этого времени машина начинает работать как синхронный двигатель. На рис. 9 показана схема асинхронного пуска. При пуске обмотка возбуждения не должна быть разомкнутой, так как в противоположном случае вследствие большого числа витков в ней вращающимся полем индуцировалась бы большая ЭДС, опасная не только для изоляции, но и для обслуживающего персонала. Обмотку возбуждения нельзя также замыкать накоротко, так как в этом случае она образует несимметричный (однофазный) контур. Он явится причиной образования дополнительного момента, под действием которого произойдет провал в кривой механической характеристики вблизи полусинхронной скорости. Из-за этого ротор при пуске может застрять на промежуточной скорости (в точке А
на рис. 10). В начале пуска обмотка возбуждения
LM
должна быть замкнута на резистор с сопротивлением, приблизительно в 10—15 раз большим, чем сопротивление самой обмотки (положение 1 переключателя
S
). По окончании пуска переключатель
S
переводится в положение 2, и обмотка возбуждения включается в сеть постоянного тока.
Рис. 9. Схема асинхронного пуск синхронного двигателя
| Рис. 10. Механическая характеристика двигателя при асинхронном пуске с провалом вблизи полусинхронной скорости | Рис. 11. Механическая характеристика двигателя при асинхронном пуске |
Асинхронный пуск синхронного двигателя характеризуется значениями пускового тока I
П и вращающих моментов— начального пускового
М
П и входного
М
B (рис. 11). Входным называется асинхронный момент при скорости ротора, равной 0,95ω1. Этот момент равен наибольшему нагрузочному моменту, при котором возможно вхождение двигателя в синхронизм при включении постоянного тока в обмотку возбуждения.
Если сеть, в которую включается синхронный двигатель, недостаточно мощна, то во избежание большого падения напряжения при асинхронном пуске применяют меры для снижения начального пускового тока: включение через автотрансформатор, реактор и т. д.
6. Синхронные компенсаторы
Синхронный компенсатор является источником реактивной мощности и служит для регулирования cosφ
сети. По режиму работы он является синхронным двигателем, работающим в режиме холостого хода, т. е. без механической нагрузки на валу. Синхронный компенсатор потребляет активную мощность, равную потерям внутри машины. Для повышения экономичности его работы потери стараются уменьшить, применяя для охлаждения водород, при этом из-за меньшей плотности водорода по сравнению с воздухом снижаются механические потери.
Рис. 12. U
-образная характеристика синхронного компенсатора
Наиболее важной характеристикой синхронного компенсатора является U
-образная характеристика (рис. 12). Она мало отличается от аналогичной характеристики синхронного двигателя при
Р
2=0.
Реактивная мощность, развиваемая синхронным компенсатором, зависит от тока возбуждения. Перевозбужденный синхронный компенсатор работает с током, опережающим напряжение сети, и отдает реактивную мощность в сеть. При недовозбуждении он работает с током, отстающим от напряжения сети, и потребляет реактивную мощность из сети.
Синхронный компенсатор включается в конце линии передачи непосредственно у потребителя. Компенсируя частично или полностью реактивную составляющую тока линии, он уменьшает общий ток и потери в ней.
Синхронные компенсаторы чаще всего применяются в сетях с большой индуктивной нагрузкой для компенсации отстающего тока. Такую нагрузку обычно создают включенные в сеть асинхронные двигатели. Компенсатор в этом случае работает с перевозбуждением. На рис. 13, 14 показаны схема включения компенсатора GC
и векторная диаграмма. На векторной диаграмме ток
I
представляет собой ток в сети при отсутствии синхронного компенсатора, а ток
I
‘ — при его включении. Реактивная составляющая
I
Р тока
I
частично скомпенсирована током синхронного компенсатора
I
C, K. В результате этого уменьшается угол между напряжением
U
и током
I
‘, a cosφ’ повышается.
В некоторых случаях синхронный компенсатор работает с недовозбуждением. Необходимость в этом возникает, если ток в линии содержит значительную опережающую составляющую, обусловленную ее емкостным сопротивлением. Это наблюдается в часы малой нагрузки линии передачи, когда отстающий ток нагрузки не компенсирует емкостную составляющую тока линии.
Синхронные компенсаторы устанавливаются также и для регулирования напряжения в конце линии электропередачи путем регулирования реактивного тока и изменения падения напряжения и его фазы. При опережающем токе синхронного компенсатора его ток возбуждения больше, чем при отстающем, поэтому условия нагрева компенсатора получаются более тяжелыми при опережающем токе.
Рис. 13. Схема включения синхронного компенсатора
→
Рис. 14. Векторная диаграмма для тока в сети при включенном синхронном компенсаторе
Вследствие этого номинальной мощностью синхронного компенсатора считается мощность при опережающем токе.
Синхронные компенсаторы имеют некоторые конструктивные отличия от двигателей. Они не имеют выходного конца вала, кроме того, поскольку вал не передает вращающего момента, он может быть выполнен тоньше. Так как от синхронного компенсатора не требуется обеспечения больших перегрузок по моменту, то М
MAX у них может быть снижен за счет уменьшения воздушного зазора (увеличения
х
d). Уменьшение воздушного зазора способствует сокращению размеров обмотки возбуждения. Все это приводит к уменьшению габаритов синхронного компенсатора.
Компенсаторы выпускаются на мощности от 2,8 до 320 MB∙А обычно в горизонтальном исполнении. Их номинальные напряжения составляют 6,6-20 кВ, а частота вращения 1000 или 750 об/мин.
7. Контрольные вопросы и домашнее задание.
| № | Содержание | Литература |
| 1 | При каких условиях синхронная машина работает в двигательном режиме? | 3, §37-1 |
| 2 | Сравните векторные диаграммы синхронной машины (рис. №2) для двигательного и генераторного режимов работы? | 3 §37-1 |
| 3 | Дайте определения существующим в синхронном двигателе потерям? | 1, §37-2; 3, §35-2 |
| 4 | Запишите уравнения электромагнитной мощности и электромагнитного момента синхронного двигателя, укажите физический смысл величин уравнений? | 2, §4-15 1, §37-2 |
| 5 | Сравните угловые характеристики синхронного генератора и синхронного двигателя (рис. №5)? | 1, §37-2; 2, §4-15 |
| 6 | Как изменится коэффициент мощности соsφ при изменении тока возбуждения синхронного двигателя? | 3, §35-3; 1, §37-2 |
| 7 | Какие характеристики синхронного двигателя называются рабочими? | 2, §4-15; 1, §37-3 |
| 8 | Способы пуска синхронного двигателя, дайте определения и сравните частотный и асинхронный пуски? | 3, §37-1; 1, §37-2 2, §4-15 |
| 9 | Для чего во время асинхронного пуска синхронного двигателя (рис. №9) его обмотка возбуждения замыкается на резистор R? | 1, §37-4 |
| 10 | В каких случаях синхронный двигатель работает как синхронный компенсатор, его назначение, область применения? | 3, §37-2; 2, §4-16 |
8. Литература
1. Токарев машины.– М.: Энергоатомиздат, 1990, 624 с.
2. Копылов машины – М.: Логос, 2000, 607с.
3. Вольдек машины. – Л.: Энергия, 1978. – 832с.
Синхронные компенсаторы
Синхронные компенсаторы (СК) используют для генерирования в электросеть реактивной мощности с целью повышения общего коэффициента мощности, стабилизации стандартного уровня напряжения в местах большого сосредоточения потребительских нагрузок, снижения потерь электроэнергии и общей оптимизации работы энергетических систем.
Конструктивно компенсатор представляют собой электродвигатель синхронного типа облегчённой конструкции, функционирующий в двигательном режиме без активной нагрузки, другими словами — на холостом ходу, исключительно на выработку реактивной энергии. Поэтому компенсаторы, устанавливаемые на питающих подстанциях, часто называют генераторами реактивной мощности. К числу наиболее мощных приемников реактивной мощности относят асинхронные электродвигателя, являющиеся приводом многих подвижных устройств.
Но в часы спада потребительских нагрузок, нередко возникает потребность в потреблении из электросети реактивной мощности, так как в такой ситуации напряжение в сети увеличивается и для поддержания его стандартного значения требуется загрузить сеть индуктивными токами. С этой целью все синхронные компенсаторы оснащаются автоматическим регулятором возбуждения, который подстраивает значение тока возбуждения таким образом, что напряжение на выводах компенсатора остается практически неизменным.
В зависимости величины от номинальной мощности синхронные компенсаторы имеют несколько типов систем возбуждения:
— электромашинное возбуждение с подвозбудителем;
Синхронные компенсаторы – это мощные электрические машины. Стандартный ряд номинальных мощностей изменяется в пределах от 10-160 тыс. кВА. Коэффициент мощности варьируется в пределах 0,92-0,95, при этом число полюсов – 8 либо 6, что соответствует частоте обращения ротора 750, 1000об/мин, соответственно. Обычно они имеют горизонтальное исполнение вала, устанавливают их в подстанционных помещениях либо под открытым небом. При наружной установке корпус компенсаторов имеет герметичное исполнение.
Выпускают компенсаторы с системами охлаждения двух типов:
— воздушной (для агрегатов с номинальной мощностью до 25МВА);
— водородной (на валу устанавливают мощные вентиляторы, обеспечивающие интенсивную циркуляцию газа).
Для выполнения асинхронного пуска синхронные компенсаторы оснащаются пусковыми обмотками, для их запуска используется способ реакторного пуска, а в определенных ситуациях — прямого.
К числу достоинств синхронных компенсаторов принято относить:
— способность плавного автоматического регулирования величины реактивной мощности;
— возможность увеличения реактивной мощности за счет увеличения/уменьшения тока возбуждения при снижении напряжения в электросети.
Источник
Типовые топологии схем компенсации реактивной мощности
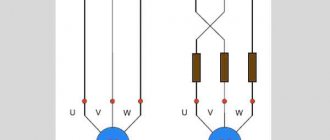
Вне зависимости от типа устройств компенсации реактивной мощности традиционными на текущий момент стали две топологии схем их присоединения к сетям электропередачи с переменного тока с линейными и нелинейными нагрузками:
- параллельная (или поперечная) компенсация реактивной мощности, при которой генерируемая параллельно подключенным в сеть устройством компенсации реактивной мощности не зависит от напряжения в точке присоединения.
Рис. Параллельная (поперечная) компенсация реактивной мощности электродвигателя (индуктивной нагрузки): а — схема без компенсации, б — схема с компенсацией
К достоинствам схем параллельной (поперечной) компенсации реактивной мощности относят:
- независимость генерируемой реактивной мощности от напряжения в точке присоединения;
- возможность плавного регулирования потока реактивной мощности для компенсации;
- эффективная стабилизация сетевого напряжения.
Недостатком параллельной (поперечной) компенсации является ограниченная возможность демпфирования быстрых изменений (колебаний) активной составляющей мощности;
- последовательная (продольная) компенсация реактивной мощности, при которой генерирующее (или потребляющее при коррекции перенапряжения) реактивную энергию устройство подключено в сеть последовательно и балансирует реактанс передающей линии.
Рис. Параллельная (продольная) компенсация реактивной мощности электродвигателя: а —схема без компенсации, б — схема с компенсацией. Рис. Типовая схема устройства последовательной (продольной) компенсации реактивной мощности с защитой от перенапряжения
Достоинствами схем последовательной (продольной) компенсации реактивной мощности считают: возможность оптимизации потоков реактивной энергии по разным фазам напряжения;
значительную степень компенсации; простоту интеграции в сеть компенсирующих устройств. Недостатки последовательной (продольной) компенсации реактивной мощности — отсутствие возможности регулирования сетевого напряжения, сложность управления устройствами при переменных нагрузках, большие риски перенапряжения во время резких изменений нагрузки из-за задержки срабатывания устройства.
Синхронные компенсаторы
Синхронный компенсатор (СК) – это синхронная машина, работающая в двигательном режиме без нагрузки на валу при изменяющемся токе возбуждения. В перевозбужденном режиме ЭДС обмотки статора Е
K1больше напряжения сети
U
K(рис. 2.25).
Под действием разности напряжений DU= E
Kl
– U
Kв статоре СК возникает ток
I
K1, отстающий от вектора
DU
1, на 90°. Компенсатор в этом режиме отдает реактивную мощность в сеть. В недовозбужденном режиме
Е
К2
Рис. 2.26. Синхронный компенсатор типа КСВ:
1
– статор;
2
– ротор;
3, 4 –
изоляционные уплотнения;
5
– вентилятор;
6
– подшипник; 7 – опорные платформы;
8
– маслонасос;
9 –
камера контактных колец;
10 –
вал;
11, 12 –
выходной и входной проемы в газоохладитель;
Синхронный компенсатор характеризуется номинальной мощностью, напряжением, током статора, частотой и номинальным током ротора. Шкала мощностей определяется по ГОСТ 609–84. Номинальное напряжение синхронного компенсатора на 5–10 % выше номинального напряжения сети.
В зависимости от тока возбуждения синхронный компенсатор может работать в режимах перевозбуждения и недовозбуждения, генерировать или потреблять реактивную мощность. Регулирование тока возбуждения осуществляется специальными схемами АРВ.
Синхронные компенсаторы небольшой мощности имеют схему электромашинного независимого возбуждения (см. рис. 2.9,а
)
,
На более мощных машинах с водородным охлаждением (КСВ) возбуждение осуществляется от специального бесщеточного возбудительного агрегата, встроенного в корпус компенсатора.
Схема АГП синхронных компенсаторов такая же, как у генераторов.
Мощные СК (10000 кВА и выше) включаются в сеть через реактор для ограничения пусковых токов и посадки напряжения на шинах (рис. 2.27). Параметры реактора выбираются так, чтобы в момент пуска напряжение на шинах подстанции не падало ниже (80 – 85%
)
U
ном,а напряжение на СК было (30 – 65
%
)
U
ном
,
при этом ток не превышает (2 –2,8)
I
ном.
Рис. 2.27. Схема реакторного пуска синхронного компенсатора
При пуске выключатель Q1
отключен,
Q2
включен. Разворот компенсатора происходит за счет асинхронного момента. Когда частота вращения приблизится к синхронной, подается возбуждение и компенсатор втягивается в синхронизм. Регулируя ток возбуждения, устанавливают минимальный ток статора и включают выключатель
Q1,
шунтируя реактор и включая СК в сеть.
Синхронные генераторы могут работать в режиме синхронного компенсатора, если закрыть доступ пара (или воды) в турбину. В таком режиме перевозбужденный турбогенератор начинает потреблять небольшую активную мощность из сети и отдает реактивную мощность в сеть.
Перевод гидрогенераторов в режим синхронных компенсаторов производится без остановки агрегатов, достаточно освободить камеру гидротурбины от воды.
Источник