Одним из наиболее важных решений, которые принимают инженеры при разработке любого типа процесса управления движением, является выбор двигателя (в нашем случае электродвигателя). Правильный выбор двигателя, как по типу, так и по размеру, является обязательным условием эффективности работы конечной машины. Кроме того, «уложиться в бюджет» так же является не самой последней задачей.
Один из первых вопросов, на который нужно ответить при принятии решения: какой тип электродвигателя будет лучшим? Требуется ли для применения высокопроизводительный серводвигатель? Будет ли недорогой шаговый двигатель лучше? Или, может быть, стоит рассмотреть третий, средний вариант?
Ответы начинаются с потребностей конкретного приложения. Перед определением типа электрической машины, которая идеально подходит для любого конкретного применения, необходимо учесть множество факторов.
Размер фрезерного станка с ЧПУ
Размер фрезерных станков с ЧПУ играет жизненно важную роль при выборе двигателя.
Если вы хотите настроить фрезерный станок с ЧПУ с небольшой площадью основания и небольшой рабочей зоной, шаговый двигатель может быть лучше, чем сервопривод.
Как правило, шаговые двигатели используются для привода компонентов линейного перемещения, таких как ременный привод, ходовой винт и шариковый винт фрезерных станков с ЧПУ с максимальной площадью резания 4 х 4 фута.
Некоторые промышленные фрезерные станки с ЧПУ начального уровня с площадью резания 4 x 8 футов и 5 футов x 10 футов также используют шаговые двигатели, что помогает снизить стоимость.
В больших фрезерных станках с ЧПУ размер порталов велик и склонен к изгибу, для предотвращения изгиба используется более тяжелая конструкция.
В таких случаях серводвигатель является более подходящим выбором.
Серводвигатели
Еще одним фактором является размер самого двигателя. Из-за сложной конструкции серводвигатели крупнее и тяжелее шаговых двигателей.
Это означает, что для небольших приложений с ЧПУ степперы являются лучшим выбором.
Управление двигателем
Шаговые двигатели перемещаются на заданное количество шагов с каждым импульсом, и контроллер не может узнать, двигался ли двигатель.
Принимая во внимание, что серводвигатель имеет замкнутый контур управления, что означает, что двигатель отправляет информацию о своем положении и направлении обратно в контроллер.
Таким образом, контроллер может проверить, не произошла ли какая-либо ошибка. Это может иметь решающее значение при работе с дорогостоящими заготовками.
Например, предположим, что вы делаете 2-дюймовый пропил на дорогостоящей заготовке, и что-то заклинило ваши линейные приводы или портал.
Если вы используете шаговые двигатели, двигатель пропустит несколько шагов и продолжит резку, а поскольку он пропустил шаги, он остановится и не будет резать до 2 дюймов.
Вам придется выбросить заготовку (или перепрофилировать ее) и начать с новой.
Принимая во внимание, что если вы используете сервоприводы, контроллер знает, как далеко на самом деле переместилась ось, и будет продолжать движение, пока не завершит весь разрез.
Что ж, это также означает, что контроллер для серводвигателя сложнее и дороже, чем контроллер для шагового двигателя.
Другой вариант достижения хороших результатов при низких затратах — использование шаговых двигателей с обратной связью.
Эти двигатели не такие дорогие, как серводвигатели, и обладают всеми характеристиками шагового двигателя с дополнительным преимуществом предотвращения ошибок.
Например, ToAUTO имеет шаговый двигатель NEMA 23 с обратной связью. Он имеет датчики положения, которые обеспечивают обратную связь для коррекции положения.
Так что, если вы хотите делать точные разрезы на заготовках для приложений, где любая ошибка может иметь катастрофические последствия, серводвигатели идеальны.
Однако программирование сервопривода сложнее, чем программирование шагового двигателя, что делает шаговые двигатели лучшим выбором для начинающих.
Шаговый двигатель с контроллером
Решение проблемы отсутствия обратной связи
За последние несколько десятилетий было предложено несколько различных подходов для решения традиционных проблем с шаговыми двигателями без обратной связи. Подсоединение двигателя к датчику при включении питания или даже несколько раз во время применения было одним из способов. Несмотря на простоту, это замедляет работу и не решает проблемы, возникающие во время обычных рабочих процессов.
Добавление обратной связи для определения, если двигатель «глохнет» или находится в нерабочем положении — это еще один подход. Инженеры в компаниях по управлению движением создали функции «обнаружения сваливания» и «поддержания положения». Было даже несколько подходов, которые пошли еще дальше, рассматривая шаговые двигатели так же, как сервоприводы, или, по крайней мере, имитируя их с помощью причудливых алгоритмов.
В широком спектре электрических машин — между сервоприводами и шаговыми двигателями с разомкнутым контуром управления — лежит несколько новая технология, известная как шаговый двигатель с замкнутым контуром. Это лучший и наиболее экономичный способ решения проблемы приложений, требующих точности позиционирования и низких скоростей. Применяя устройства обратной связи с высоким разрешением, чтобы «замкнуть петлю», инженеры могут наслаждаться «лучшим из обоих миров».
Шаговые двигатели с замкнутым контуром управления впитали в себя все преимущества шаговых двигателей: простота использования, простота и возможность стабильной работы на низких скоростях с точной остановкой. Кроме того, они по-прежнему предлагают возможности обратной связи серводвигателей. К счастью, это не должно сопровождаться самым большим недостатком сервопривода: большим ценником.
Ключ всегда был в принципе работы шаговых двигателей без обратной связи. У них обычно есть две катушки, иногда пять, с магнитным балансированием, происходящим между ними. Движение нарушает этот баланс, приводя к тому, что вал двигателя электрически отстает, но оператор не может знать, насколько он отстает. Точка остановки повторяется для шаговых машин с разомкнутым контуром, но не для всех нагрузок. Установка энкодера на степпер и замыкание контура обратной связи обеспечивает некоторое динамическое управление. Это позволяет операторам точно позиционировать рабочий орган при различных нагрузках.
Эти преимущества от использования шаговых двигателей с обратной связью для определенных применений резко увеличили популярность этих двигателей в сообществе инженеров электроприводчиков. В частности, в двух наиболее популярных отраслях — производстве полупроводников и медицинских приборов — наблюдается явное увеличение использования шаговых двигателей с обратной связью. Инженеры в этих отраслях должны точно знать, где расположен вал двигателя с нагрузкой, независимо от того, приводят ли они в действие ремень или шариковый винт. Обратная связь в этих электроприводах позволяет им точно знать, где находится вал. Они также могут обеспечить лучшую производительность, чем сервоприводы на более низких скоростях.
Как правило, любое приложение, которому требуется гарантированная производительность при меньших затратах, чем у серводвигателя, и возможность работать на относительно низких скоростях, является хорошим кандидатом для шаговых двигателей с обратной связью.
Помните, что операторы должны убедиться, что привод или рабочие.органы управления поддерживают шаговые двигатели с обратной связью. «Исторически», вы могли получить степпер с энкодером на задней панели, но система управления не поддерживала энкодеры. Вам необходимо будет провести калибровку обратной связи и убедиться, что контроллер электродвигателя получает обратную связь с допустимой задержкой. В новых шаговых приводах с обратной связью это не требуется. Шаговые приводы с замкнутым контуром могут динамически и автоматически управлять позицией и скоростью без привлечения контроллеров.
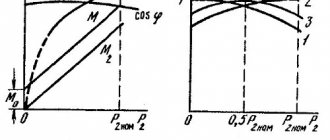
Скорость и крутящий момент
Шаговые двигатели эффективно работают при 1200 об/мин или ниже и могут создавать высокий крутящий момент на низких скоростях.
Вы можете найти шаговые двигатели с удерживающим моментом, как правило, от 30 до 1500 унций на дюйм.
Но этот крутящий момент уменьшается по мере увеличения скорости двигателя, иногда до 80% при очень высоких оборотах.
Серводвигатели работают со скоростью более 2000 об/мин и доступны с гораздо более высоким номинальным крутящим моментом, чем шаговые двигатели, что делает их быстрее, чем шаговые двигатели.
Самое замечательное в серводвигателях то, что они способны обеспечивать постоянный крутящий момент во всем диапазоне скоростей.
Понятно, что сервоприводы имеют лучшие характеристики крутящего момента по сравнению с шаговыми двигателями, поэтому, если вы хотите использовать действительно тяжелые шпиндели, вам могут понадобиться сервоприводы.
Кроме того, если вы используете тяжелые порталы вместе с тяжелым шпинделем, вам следует рассмотреть возможность использования сервоприводов для увеличения скорости.
Кроме того, сервоприводы лучше работают при динамических нагрузках.
Это означает, что сервоприводы стабильно работают с разными материалами и настройками резки, поскольку они падают под разными нагрузками.
Но это не означает, что шаговые двигатели всегда являются плохим выбором для больших ЧПУ.
Шаговый двигатель NEMA 34 может работать со шпинделем мощностью 7 л.с. на фрезерном станке с ЧПУ из алюминия и стали и при этом достигать высокой скорости около 1000 дюймов в минуту.
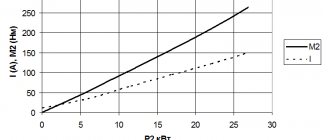
Крутящий момент. Шаговые двигатели и серводвигатели
Еще одно существенное различие между ними — время, затрачиваемое на нарезку. Двигатели не могут мгновенно достичь полной скорости, им требуется время, чтобы разогнаться до полной скорости и остановиться.
Когда дело доходит до ускорения и торможения, сервоприводы быстрее на несколько миллисекунд по сравнению с шаговыми двигателями.
Несколько миллисекунд не будут иметь значения, если вы изготавливаете детали с быстрым циклом и с минимальным количеством изменений направления резки.
Но когда вы изготавливаете детали, для которых шпиндель должен часто менять направление, двигатели должны останавливаться, а затем ускоряться в новом направлении.
В таких случаях эти миллисекунды складываются, и существует значительная разница во времени выполнения проекта между сервоприводами и шаговыми двигателями.
Вывод таков: если вы работаете в производственной среде, где скорость производства имеет большое значение, вам следует использовать сервоприводы.
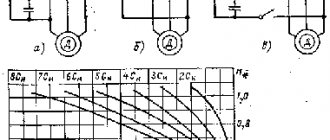
Асинхронные двигатели
Наиболее распространенные электрические машины. В основном они используются как электродвигатели и являются основными преобразователями электрической энергии в механическую.Асинхронный двигатель имеет статор (неподвижная часть) и ротор (подвижная часть), разделенные воздушным зазором, ротор крепится на подшипниках. Активными частями являются обмотки; все остальные части — конструктивные, обеспечивающие необходимую прочность, жесткость, охлаждение, возможность вращения и т. п. По конструкции ротора асинхронные машины подразделяют на два основных типа: с короткозамкнутым ротором и с фазным ротором. Оба типа имеют одинаковую конструкцию статора и отличаются лишь исполнением обмотки ротора. Магнитопровод ротора выполняется аналогично магнитопроводу статора — из электротехнической стали и шихтованным. Фазный ротор используют когда необходимо создать большой пусковой момент. К ротору подводят ток и в результате уже возникает магнитный поток необходимый для создания момента.
На обмотку статора подается напряжение, под действием которого по этим обмоткам протекает ток и создает вращающееся магнитное поле. Магнитное поле воздействует на стержни ротора и по закону магнитной индукции возникает электрический ток т. к. изменяется магнитный поток, проходящий через замкнутый контур ротора. Токи в стержнях ротора создают собственное магнитное поле стержней, которые вступают во взаимодействие с вращающимся магнитным полем статора. В результате на каждый стержень действует сила, которая складываясь по окружности создает вращающийся электромагнитный момент ротора из-за того, что индукционный ток, возникающий в замкнутом контуре ротора, имеет такое направление, что создаваемое им магнитное поле противодействует тому изменению магнитного потока, которым был вызван данный ток. Следовательно и возникает вращение.Частота вращения ротора не может достигнуть частоты вращения магнитного поля, так как в этом случае угловая скорость вращения магнитного поля относительно обмотки ротора станет равной нулю, магнитное поле перестанет индуцировать в обмотке ротора Э.Д.С. и, в свою очередь, создавать крутящий момент.
Рисунок 3 — Вид асинхронной машины с короткозамкнутым ротором в разрезе
На рисунке приведен вид асинхронной машины с короткозамкнутым ротором в разрезе:
1 — станина,
2 — сердечник статора,
3 — обмотка статора,
4 — сердечник ротора с короткозамкнутой обмоткой,
5 — вал.
Удержание крутящего момента
Удерживающий момент определяет способность вала двигателя оставаться на месте, когда катушки находятся под напряжением.
Шаговый двигатель не будет вращаться без входного сигнала, пока крутящий момент на валу двигателя меньше удерживающего момента двигателя.
Принимая во внимание, что в серводвигателе удерживающий момент практически отсутствует. Так как же серводвигатель удерживает нагрузку на месте?
Механизм обратной связи в серводвигателе обнаруживает любое изменение положения вала и мгновенно корректирует положение вала. Он в основном колеблется в удерживаемом положении, но колебания незначительны.
Но когда сервоприводы настроены неправильно, они производят вибрации и шум при удержании груза в стационарном положении.
Удерживающий момент является основным фактором, когда вам нужно удерживать груз в вертикальном направлении, например, в случае шпинделя на оси Z.
Это особенно важно, когда вы используете шарико-винтовые пары для линейного перемещения.
Внутреннее трение в шарико-винтовых передачах низкое, и они могут иметь обратный привод.
Это означает, что если вы используете шариковый винт на оси Z и поднимаете шпиндель вверх, вес шпинделя может опустить шариковый винт вниз.
Чтобы предотвратить это, двигатель, соединенный с компонентом линейного перемещения, должен иметь достаточный удерживающий момент, чтобы предотвратить обратное движение нагрузки компонентов линейного перемещения.
Использование шагового двигателя с достаточным удерживающим моментом — простой и легкий способ добиться этого.
Сервоприводы могут выполнять такую же хорошую работу, но вам потребуется тщательно настроить контроллер, чтобы предотвратить ненужные вибрации и шум, которые могут повредить другие компоненты вашей сборки.
Шаговый двигатель с шариковым винтом
Входная мощность и эффективность
Шаговые двигатели работают от постоянного тока и обычно работают на полную мощность независимо от нагрузки. Шаговые двигатели имеют КПД около 70%.
С другой стороны, вы можете найти сервоприводы, которые работают от источника переменного или постоянного тока, и они потребляют мощность, пропорциональную нагрузке, которую они несут, поэтому сервоприводы могут давать 80-90% эффективности.
Энергопотребление — это фактор, который следует учитывать, когда вы работаете в производственной среде, и дополнительные деньги, которые вы тратите на сервоприводы, могут сэкономить вам деньги на счетах за электроэнергию.
Однако, если объемы вашего производства невелики, а нагрузки меньше, инвестиции в сервопривод не имеют реальной экономической выгоды, что делает шаговые двигатели лучшим выбором.
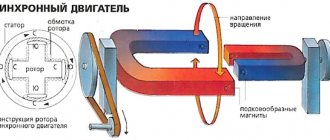
Синхронные двигатели
Синхронный двигатель не имеет принципиальных конструктивных отличий от асинхронных. На статоре синхронного двигателя помещается трехфазная обмотка, при включении которой в сеть трехфазного переменного тока будет создано вращающееся магнитное поле, число оборотов в минуту которого n = 60f/p, где f — частота напряжения питания привода. На роторе двигателя помещена обмотка возбуждения, включаемая в сеть источника постоянного тока. Либо ротор выполнен из постоянного магнита. Ток возбуждения создает магнитный поток полюсов или в случае с постоянным магнитом, магнитный поток уже создан. Вращающееся магнитное поле, полученное токами обмотки статора, увлекает за собой полюса ротора. При этом ротор может вращаться только с синхронной скоростью, т. е. со скоростью, равной скорости вращения поля статора. Таким образом, скорость синхронного двигателя строго постоянна, если неизменна частота тока питающей сети.
Достоинством синхронных двигателей является меньшая, чем у асинхронных, чувствительность к изменению напряжения питающей сети. У синхронных двигателей вращающий момент пропорционален напряжению сети в первой степени, тогда как у асинхронных — квадрату напряжения. Вращающий момент синхронного двигателя создается в результате взаимодействия магнитного поля статора с магнитным полем полюсов. От напряжения питающей сети зависит только магнитный поток поля статора.
Точность и воспроизводимость
Разрешение двигателей с ЧПУ является фактором, влияющим на точность и повторяемость фрезерных станков с ЧПУ.
Как правило, разрешение шаговых двигателей зависит от количества шагов.
Типичный шаговый двигатель имеет 200 шагов, что означает, что он поворачивается на 1,8 градуса за каждый полученный импульс.
Если вы используете микрошаг, вы можете улучшить это разрешение. Например, если вы используете микрошаг 1/8, разрешение станет 0,225 градуса на 200-шаговом двигателе.
Кроме того, шаговые двигатели часто предпочитают из-за их простой конструкции и системы с разомкнутым контуром, которые практически не требуют настройки. Следовательно, они обеспечивают хорошую точность без особой настройки.
С другой стороны, сервоприводы используют энкодер для определения положения вала двигателя, а разрешение двигателя зависит от энкодера и способности контроллера точно регулировать напряжение и ток.
Например, если серводвигатель имеет разрешение 1000 импульсов/об, это показывает, что контроллер сможет определять каждые 0,36 градуса поворота вала двигателя.
Теоретически сервоприводы имеют бесконечное разрешение, но вам необходимо правильно настроить их и поддерживать энкодер и контроллер в хорошем состоянии для достижения очень высокой точности.
Для любительских приложений, где вам не требуется высокая точность и прецизионность, степперы являются вполне разумным выбором.
Однако шаговые двигатели могут пропускать шаги и вызывать ошибочные сокращения, когда они нагреваются из-за непрерывной работы.
Серводвигатели имеют лучшую точность позиционирования, чем шаговые двигатели.
Это связано с тем, что серводвигатели имеют замкнутый контур управления, что позволяет им корректировать свои движения.
Вы также можете получить хорошую повторяемость от серводвигателей, если они повернуты правильно. Их повторяемость также зависит от качества используемого энкодера.
Вращающийся энкодер для определения положения вала
Шум
Шум может быть проблемой при работе с ЧПУ.
Шаговые двигатели могут быть немного шумными по сравнению с серводвигателями.
Чтобы преодолеть это, вы можете использовать драйверы шаговых двигателей с поддержкой микрошагов, что помогает снизить уровень шума.
Вы можете найти шаговые драйверы, которые могут управлять микрошагом до 1/128, чтобы значительно снизить уровень шума и обеспечить плавное движение вала на низких скоростях.
Кроме того, микрошаг устраняет влияние резонансной частоты, которая вызывает вибрации в шаговых двигателях.
Однако микрошаг может создавать меньший крутящий момент, который может составлять около 70% крутящего момента, создаваемого при полношаговом управлении.
Вы можете использовать серводвигатели для устранения шума и вибраций двигателя, но вам все равно придется беспокоиться о шуме фрезерного станка/шпинделя.
Как правило, шум фрезера/шпинделя перевешивает все остальное, и это делает шум двигателя незначительным.
Срок службы и техническое обслуживание
Шаговые двигатели состоят из меньшего количества компонентов, и подшипник — единственная быстроизнашивающаяся деталь, которую можно заменить.
Серводвигатели используют энкодеры и редукторы в качестве основных компонентов, что делает их механически сложными.
Следовательно, шаговые двигатели требуют меньше обслуживания по сравнению с серводвигателями.
Однако шаговые двигатели более подвержены повреждениям из-за механических ошибок, таких как перегрузка и заедание, чем серводвигатели.
Сервоприводы
В состав сервопривода входят серводвигатель и электронный блок управления (сервоусилитель или сервопреобразователь). В качестве серводвигателей наиболее широко применяют синхронные трехфазные электродвигатели, в которых установлены мощные постоянные магниты для улучшения динамических характеристик. Обязательным компонентом сервопривода также является энкодер. Как правило, он превосходит по своим параметрам обычные энкодеры, поставляемые отдельно. Его разрешение может достигать сотен тысяч импульсов на оборот, за счет чего достигается сверхточное позиционирование. Для примера, разрешение встроенных энкодеров сервоприводов Delta ASD-A2 составляет 1 280 000 имп/об.
Сервоусилитель получает два сигнала управления — сигнал задания скорости (или угла поворота) и сигнал обратной связи с энкодера. В результате сервопривод обеспечивает движение какой-либо механической нагрузки с большой точностью не только по скорости вращения, но и по углу поворота, который может быть выдержан до долей градуса.
Стоимость
Стоимость часто является основной причиной выбора шаговых двигателей, а не сервоприводов.
Типичный сервопривод как минимум в три раза дороже шагового двигателя того же размера и мощности.
Это связано со сложностью его конструкции.
Шаговые двигатели используют систему без обратной связи и имеют простую конструкцию, исключающую сложность и дополнительную стоимость.
Кроме того, контроллеры серводвигателей используют сложные схемы для достижения высокой производительности.
Драйверы шаговых двигателей недороги по сравнению с сервоприводами из-за их простой конструкции и доступности.
В целом дополнительные компоненты и сложная система делают систему серводвигателя дорогостоящей.
Серводвигатель с драйвером
Однако в условиях промышленного производства дополнительные затраты оправдываются более высокой эффективностью системы серводвигателя.
Кроме того, сервоприводы производят детали, которые имеют меньше брака и сокращают потери сырья.
Почему серводвигатели дороже шаговых двигателей?
В серводвигателях используются редкоземельные магниты, которые дороже, чем обычные магниты, используемые в шаговых двигателях. Серводвигатели также имеют энкодер или резольвер и редуктор. Следовательно, общая компоновка делает серводвигатели механически более сложными и более дорогими, чем шаговые двигатели.
Могу ли я самостоятельно заменить энкодер моего серводвигателя?
Самостоятельно заменить энкодер в серводвигателе очень сложно. Для этого требуется найти смещение между энкодером и положением ротора, и лучше всего это может сделать обученный обслуживающий персонал.
Могу ли я добавить внешний энкодер к своим шаговым двигателям?
Вы можете добавить внешние энкодеры к своим шаговым двигателям. Энкодер позволяет отслеживать положение и скорость вала двигателя. Добавление энкодера к шаговому двигателю оказывает значительное влияние на производительность двигателя.
Гибридные двигатели
Рисунок 5 — Устройство гибридных двигателей
Являются более дорогими, чем двигатели с постоянными магнитами, зато они обеспечивают меньшую величину шага, больший момент и большую скорость. Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400 (угол шага 3,6…0,9°). Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении. Ротор разделен на две части, между которыми расположен цилиндрический постоянным магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки — южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для 3,6° двигателей и 8 основных полюсов для 1,8…0,9° двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними. Зависимость между числом полюсов ротора, числом эквивалентных полюсов статора и числом фаз определяет угол шага S двигателя:
S = 360 / ( Nph × Ph ) = 360 / N S= 360 / ( Nph times Ph ) = 360 / N
где Nph — число эквивалентных полюсов на фазу, равное числу полюсов ротора, Ph — число фаз, N — полное количество полюсов для всех фаз вместе.