Устройство
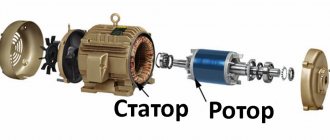
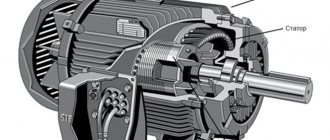
Конструктивно синхронный электродвигатель состоит из неподвижного элемента, подвижной части, обмоток различного назначения, может комплектоваться коллекторным узлом. Далее рассмотрим каждую составляющую синхронного агрегата более детально на рабочем примере (рисунок 1).
Рис. 1. Устройство синхронного электродвигателя
- Статор или якорь – выполняется из электротехнической стали монолитным или наборным из шихтованного железа. Предназначен для размещения рабочей обмотки, проводит силовые линии электромагнитного поля, формируемого протекающими токами.
- Обмотка на статоре – изготавливается из медных проводников, в зависимости от типа статора синхронного электродвигателя может выполняться различными методами, способами намотки и расположения проводников. Применяется для подачи напряжения питания и формирования рабочего магнитного потока.
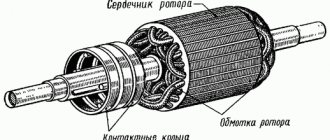
- Ротор с обмоткой возбуждения – предназначен для взаимодействия с магнитным полем статора. В результате подачи напряжения на обмотку возбуждения в роторе электродвигателя создается собственное магнитное поле, задающее состояние вращающегося элемента.
- Вал – используется для передачи вращательного усилия от электродвигателя к подключаемой к нему нагрузке. В большинстве случаев это основание, на котором крепиться шихтовка или полюса ротора, подшипники, кольца, пластины и другие вспомогательные элементы.
- Контактные кольца – применяются для подачи питания на обмотки ротора, но устанавливаются не во всех моделях синхронных агрегатов. Питание производиться через специальный преобразователь переменного напряжения в постоянное.
- Корпус – предназначен для защиты от воздействия внешних факторов, обеспечивает синхронному двигателю достаточную прочность и герметичность, в зависимости от условий его эксплуатации.
Способы возбуждения
Работа роторного синхронного движка зависит от приведения в действия источника магнитодвижущей силы. Это может быть генератор, у которого магнитное поле сцепляется с обмоткой статора и приводит к ним электрическую силу. У мотора происходит взаимодействие магнитных полей составляющих элементов.
Существуют два способа возбуждения – электромагнитное или с обмоткой, и с постоянными магнитами. Первые довольно широко распространены. В этой схеме при прохождении постоянного тока через подмотку появляется движущаяся магнитная сила, приводящая магнитное поле в системе механизма.
В недалеком прошлом стимуляцию синхронных агрегатов осуществляли генераторы постоянного тока со схемой самовозбуждения или с независимым типом возбуждения. В последнем варианте подается ток в возбудительную обмотку. Применялся дополнительный компенсатор переменного тока, работающий параллельно.
Под самовозбуждением, характерным для синхронных движков и гидрогенераторов, понимают процесс преобразования энергии постоянного тока, которая необходима для стимулирования, в силу постоянного тока. Это происходит через понижающий трансформатор и специальный преобразователь.
В генераторах, обладающих самовозбудительным свойством, обмотка полюсов питается электричеством, вырабатываемым самим прибором. То есть, нет необходимости организовывать отдельный источник энергии. Выделяют следующие виды самовозбуждения, зависящие от алгоритма включения обмотки:
- Параллельное – ток якоря прибора распределяется на ток нагрузки и ток возбуждения. Последний обычно невелик, и тогда генератор не испытывает высокие нагрузки. Обычно эти агрегаты используют как источники питания на автомобилях, кораблях или самолетах.
- Последовательное. Обмотка статора и возбудительное обматывание между собой соединяются по последовательной схеме. Такие приборы редко используются.
- Смешанное. Эти агрегаты обладать обмотками возбуждения, имеющие согласно и встречно подключенные возбудительные обмотки. Напряжение остается прежним при возрастании или снижении тяги. Приборы применяются, когда требуется достаточная стабильность электропитания при смене нагрузки.
В современном мире в синхронных моторах за возбуждение отвечают тристорные приборы, которые включаются в сеть переменного тока и автоматически управляемые возбудительным током в разных эксплуатационных режимах установки. Это самый надежный способ, ибо у них высокий КПД. На заводах обычно выпускают тристоры для различного электронапряжения с возможным показателем постоянного тока, равным 320 ампер.
В маломощных «синхронниках» применяется схема возбуждения постоянными магнитами. В этом случае на индукторе находятся магниты постоянного действия, что позволяет не использовать возбудительную обмотку. В итоге, каркас машины становится проще, надежнее и экономичнее. Но из-за нехватки материалов приходится использовать девайсы, мощность которых едва достигает нескольких киловатт.
Принцип работы
В основе работы синхронного электродвигателя лежит взаимодействие магнитного потока, генерируемого рабочими обмотками с постоянным магнитным потоком. Наиболее распространенной моделью синхронной электрической машины является вариант с рабочей обмоткой на статоре и обмоткой возбуждения на роторе.
Рис. 2. Принцип действия синхронного электродвигателя
Как видите на рисунке 2 выше, в обмотку статора подается трехфазное напряжение из сети, которое формирует переменное магнитное поле. На обмотки ротора электродвигателя подано постоянное напряжение, которое индуцирует такой же постоянный магнитный поток у полюсов. Для наглядности рассмотрим процесс на упрощенной модели синхронного агрегата (рисунок 3).
Рис. 3. Принцип формирования потоков в синхронной электрической машине
При подаче питания на фазные витки статора электродвигателя первый пик амплитуды тока и ЭДС взаимоиндукции приходиться на фазу A, затем B и фазу C.
На графике показана периодичность чередования кривых в зависимости от времени:
- в точке 1 максимальная ЭДС EA формирует максимальный поток, а электродвижущие силы фаз EB и EC равны между собой и противоположны по знаку, они дополняют результирующую силу.
- в точке 2 пика достигает ЭДС EB, а электродвижущие силы фаз EA и EC становятся равны между собой и противоположны по знаку, они дополняют результирующую силу, в результате чего магнитное поле совершает вращательное движение.
- в точке 3 максимум приходиться на ЭДС EC, а электродвижущие силы фаз EB и EA вместе дополняют результирующую силу и снова смещают вектор поля по часовой стрелке.
Оборот поля статора происходит в течении периода, а за счет того, что ротор обладает собственным электромагнитным усилием постоянным во времени, то он синхронно следует за движением переменного магнитного поля, вращаясь вокруг заданной оси. В результате такого вращения происходит синхронное движение ротора вслед за сменой амплитуды ЭДС в витках рабочих обмоток, за счет этого явления электродвигатель и получил название синхронного. Наличие отдельного питания отразилось и на схематическом обозначении таких электрических машин (рисунок 4) в соответствии с ГОСТ 2.722-68.
Рис. 4. Схематическое обозначение синхронного электродвигателя
Пуск синхронного двигателя
Особенностью этого вида электрических машин является то, что его нельзя просто подключить к сети и ожидать его запуска. Кроме того, что для работы СД нужен не только источник тока возбуждения, у него и достаточно сложная схема пуска.
Запуск происходит как у асинхронного двигателя, а для создания пускового момента кроме обмотки возбуждения на роторе размещают и дополнительную короткозамкнутую обмотку «беличью клетку». Её еще называют «демпфирующей» обмоткой, потому что она повышает устойчивость при резких перегрузках.
Ток возбуждения в обмотке ротора при пуске отсутствует, а когда он разгоняется до подсинхронной скорости (на 3-5% меньше синхронной), подаётся ток возбуждения, после чего он и ток статора совершает колебания, двигатель входит в синхронизм и выходит на рабочий режим.
Для ограничения пусковых токов мощных машин иногда уменьшают напряжение на зажимах обмоток статора, подключив последовательно автотрансформатор или резисторы.
Пока синхронная машина запускается в асинхронном режиме к обмотке возбуждения подключаются резисторы, сопротивление которых превышает сопротивление самой обмотки в 5 — 10 раз. Это нужно чтобы пульсирующий магнитный поток, возникающий под действием токов, наводимых в обмотке при пуске, не замедлял разгон, а также чтобы не повредить обмотки из-за индуцируемыми в ней ЭДС.
Отличие от асинхронного двигателя
Основным отличием синхронного электродвигателя от асинхронного заключается в принципе преобразования электрической энергии в механическое вращение. У синхронного электродвигателя процесс вращения ротора идентичен вращению рабочего электромагнитного поля, вырабатываемого трехфазной сетью. А вот у асинхронного рабочее поле самостоятельно наводит ЭДС в роторе, которая уже затем вырабатывает собственный поток взаимоиндукции и приводит вал во вращение. В результате чего асинхронные электрические машины получают разность во вращении рабочего поля и нагрузки на валу, что выражается физической величиной – скольжением.
В работе классические модели асинхронных электродвигателей с короткозамкнутым ротором:
- плохо переносят перегрузки;
- имеют сложности пуска со значительным усилием;
- меняют скорость вращения, в зависимости от нагруженности рабочего органа.
В некоторой степени эти недостатки преодолевает асинхронный двигатель с фазным ротором, но в полной мере избавиться от недостатков получается лишь синхронному агрегату.
Рис. 5. Отличие асинхронного от синхронного электродвигателя
Разновидности
В современной промышленности и бытовых приборах синхронные электродвигатели используются для решения самых разнообразных задач. Как результат, существенно разнятся и их конструктивные особенности. На практике выделяют несколько критериев, по которым разделяются виды синхронных агрегатов. В соответствии с ГОСТ 16264.2-85 могут подразделяться по таким техническим характеристикам:
- питающему напряжению;
- частоте рабочего напряжения;
- количеству оборотов.
В зависимости от способа получения поля ротора выделяют такие типы синхронных электродвигателей:
- С обмоткой возбуждения на роторе – синхронизирующее усилие создается за счет подачи питания от преобразователя.
- С магнитным ротором – на валу устанавливается постоянный магнит, выполняющий те же функции, что и обмотка возбуждении, но без необходимости подпитки (см. рисунок 6).
Рис. 6. Синхронный электродвигатель с постоянными магнитами
С реактивным ротором — конструкция выполнена таким образом, что в его сердечнике происходит преломление магнитных линий, приводящее всю конструкцию в движение (см. рисунок 7). Под воздействием силового поля поперечные и продольные составляющие в роторе не равны за счет чего пластины поворачиваются вслед за полем.
Рис. 7. Пример реактивного ротора
В зависимости от наличия полюсов все синхронные электродвигатели можно подразделить на:
- явнополюсные – в конструкции четко видны обособленные полюса с обмотками, применяются для малых скоростей;
- неявнополюсные – полюс не выделяется, такие модели устанавливают для высоких скоростей;
В зависимости от расположения рабочих обмоток различают прямые (на статоре) и обращенные (рабочие обмотки на роторе).
Механическая и угловая характеристика
В силу особенностей, присущих синхронному двигателю, значение его момента не зависит от оборотов вращения. Это свойство привода определяет его назначение и сферу применения. Технические качества приводного оборудования для конфигурирования электропривода оцениваются зависимостью частоты вращения мотора от электромагнитного момента, развиваемого им. Эта зависимость известна как механическая характеристика синхронного двигателя. Она может быть статической или динамической. Первая показывает поведение СД в стабильном рабочем режиме. Вторая характеризует его работу в переходный период.
Качество механических характеристик оценивается жесткостью. Относительно этого параметра все характеристики делятся на идеально жесткие, жесткие и мягкие. В связи с тем, что частота вращения ротора синхронного двигателя под нагрузкой не меняется, этот тип электромоторов обладает идеально жесткой характеристикой, что выражается формулой:
n = 60*f1/p,
где f1
– частота тока статора;
p –
число пар полюсов статорной обмотки.
Но зависимость n = f (M)
не отражает полного поведения мотора, в котором при увеличении нагрузки происходит смещение осей поля индуктора и якоря. Каждой нагрузке соответствует определенный угол между их осями. Уравнение угловой характеристики:
Mэм = Mmax*sin θ
Это формула, выражает приблизительную зависимость момента на валу от угла вылета ротора. В реальных условиях максимальному моменту соответствует угол, несколько меньший, чем 90˚. При этом перегрузочная способность СД равна: λм = Мmax/MN = 2–3.
Режимы работы
Большинство электрических машин обладают обратимой функцией, не составляют исключения и синхронные агрегаты. Их также можно использовать в качестве электрического привода или в качестве генератора, вырабатывающего электроэнергию. Оба режима отличаются способом воздействия на электрическую машину – подачу напряжения на рабочие обмотки или приведение в движение ротора за счет механического усилия.
Генераторный режим
Для производства электроэнергии в сеть используются именно синхронные генераторы. В большинстве случаев для этой цели используются электрические машины с фазными обмотками на статоре, что существенно упрощает процесс съема мощности и дальнейшей передачи ее в сеть. Физически генерация происходит при воздействии электромагнитного поля обмотки возбуждения синхронного генератора с обмотками статора. Силовые линии поочередно пересекают фазные витки и наводят в них ЭДС взаимоиндукции, в результате чего на клеммных выводах возникает напряжение.
Частота получаемого напряжения напрямую зависит от скорости вращения вала и вычисляется по формуле:
f = (n*p)/60 ,
где n – скорость вращения вала, измеряемая в оборотах за минуту, p – количество пар полюсов.
Синхронный компенсатор
В виду физических особенностей синхронного электродвигателя при холостом ходе аппарата он потребляет из сети реактивную мощность, что позволяет существенно улучшить cosφ системы, практически приближая его к 1.На практике режим синхронного компенсатора используется как для улучшения коэффициента мощности, так и для стабилизации параметров напряжения сети.
Двигательный режим
В синхронной машине двигательный режим осуществляется при подаче рабочего трехфазного напряжения на обмотки якоря. После чего электромагнитное поле якоря начинает толкать магнитное поле ротора, и вал приходит во вращение. Однако на практике двигательный режим осуществляется не так просто, так как мощные агрегаты не могут самостоятельно набрать необходимый ресурс скорости. Поэтому во время запуска используют специальные методы и схемы подключения.
Рабочий процесс
Синхронный двигатель это электротехническое устройство, работающее на основе закона электромагнитной индукции. Принцип работы и устройство СД предусмотрены из условия практического применения этого физического явления. Магнитное поле создается трехфазной обмоткой, размещенной в пазах статорного пакета аналогично цепи асинхронной машины. На роторе размещена обмотка возбуждения, питаемая постоянным током. Питание к ней подводится через щетки и кольца. Постоянный ток, протекающий по возбуждающей обмотке, взаимодействует с вращающимся полем индуктора, что вызывает круговое движение вала. Вращающий момент зависит от токовой нагрузки и не зависит от скорости. Вот почему этот тип привода называется синхронный электродвигатель, то есть частота оборотов якоря равна скорости поля индуктора.
После запуска синхронный двигатель переменного тока вращается одновременно с магнитным потоком. СД не может запускаться с помощью только питающей сети. Это объясняется инерционностью роторного блока и высокой скоростью вращающегося поля. Схема включения маломощной машины предусматривает использование пусковых (демпферных) обмоток, с которыми она работает как синхронный двигатель с короткозамкнутым ротором (то есть реализуется асинхронный пуск). В случае мощных электроприводов пуск производится вспомогательным электромотором или преобразователем частоты.
Наибольшее распространение получил асинхронный пуск, предусматривающий устройство дополнительной КЗ-обмотки. В этом случае синхронный двигатель с короткозамкнутым ротором запускается аналогично асинхронному эл/двигателю. Вследствие таких действий роторный механизм разгоняется до скорости вращающегося магнитного потока. Если синхронный электродвигатель нагружается, расстояние между полюсами якоря и поля увеличивается. Как результат, якорный механизм отстает на нагрузочный угол, что соответствует отставанию от своего положения на холостом ходу.
Устройство и принцип действия синхронного двигателя предусматривают эксплуатацию привода с постоянной скоростью, которая не зависит от нагрузки. СД не рассчитан на нагрузку, величина которой превышает пусковую мощность между роторным механизмом и магнитным потоком. В противном случае синхронизм прерывается, и работа синхронного двигателя останавливается.
Способы пуска и схемы подключения
Для запуска синхронного электродвигателя требуется дополнительное поле, независимое от воздействия сети. В то же время, на стартовом этапе запуск представляет собой асинхронный процесс, пока агрегат не достигнет синхронной скорости.
Рис. 8. Схема пуска синхронного двигателя
При подаче напряжения на якорь возникает ток в его обмотках и генерация ЭДС в железе ротора, который обеспечивает асинхронное движение до того момента, пока не начнется питание обмоток возбуждения.
Еще одним распространенным вариантом пуска является использование дополнительных генераторов, которые могут располагаться на валу или устанавливаться отдельно. Такой метод обеспечивает дополнительное стартовое усилие за счет стороннего крутящего момента.
Рис. 9. Генераторный способ пуска синхронного двигателя
Как видите на рисунке 9, начальное вращение мотора М осуществляется за счет генератора G, который призван вывести устройство на подсинхронную скорость. Затем генератор выводится из рабочей цепи путем размыкания контактов КМ или автоматически при установке рабочих характеристик. Дальнейшее поддержание синхронного режима происходит за счет подачи постоянного напряжения в обмотку возбуждения.
Помимо этого на практике используется схема пуска с полупроводниковыми преобразователями. На рисунке 10 приведен способ тиристорного преобразователя и с установкой вращающихся выпрямителей.
Рис. 10. Тиристорная схема пуска синхронного двигателя
В первом случае запуск синхронного электродвигателя характеризуется нулевым напряжением от преобразователя UD. За счет ЭДС скольжения через стабилитроны VD осуществляется открытие тиристоров VS. В цепь обмотки возбуждения вводится резистор R, предназначенный для предотвращения пробоя изоляции. По мере разгона электродвигателя ЭДС скольжения пропорционально снизится и произойдет запирание стабилитронов VD, цепочка заблокируется, и обмотка возбуждения получит питание постоянным напряжением через UD.
Применение
Область применения синхронных электрических машин охватывает производство электрической энергии на электростанциях. По видам генераторы подразделяются на турбинные, дизельные и гидравлические, в зависимости от способа приведения их во вращение.
Также их используют в качестве электродвигателей, которые могут переносить существенные перегрузки в процессе эксплуатации. Такие двигатели устанавливаются на вентиляторах, компрессорах, силовых агрегатах и прочем оборудовании. Отдельная категория электродвигателей применяется в точном оборудовании, где важна синхронизация операций и процессов.
Преимущества и недостатки
К преимуществам такого электродвигателя следует отнести:
- высокий cosφ, приближающийся по величине к 1, что в значительной мере превосходит асинхронные электродвигатели;
- более высокая механическая прочность за счет особенностей конструкции электродвигателя;
- зависимость момента вращения от напряжения линейная, а не квадратичная, поэтому колебания электродвигателя пропорционально снижаются;
- на валу электродвигателя присутствует постоянная скорость, не зависящая от прикладываемой нагрузки;
- может применяться для уменьшения реактивной составляющей в сети.
Среди недостатков синхронных электродвигателей выделяют:
- сложную конструкцию;
- более сложный пуск;
- необходимость использования вспомогательных устройств и блоков;
- такие электродвигатели сложнее регулировать по числу оборотов;
- ремонт и обслуживание также обойдется дороже, чем асинхронные электродвигатели.
Плюсы и минусы
У электрической машины с синхронной схемой имеются такие достоинства:
- Высокие производительные коэффициенты
- Использование «синхронников» на производстве для повышения индекса мощности
- Повышенный КПД, который в разы больше, чем у «асинхронника»
- Хорошая степень прочности
- Отсутствие чувствительности к изменению показателей напряжения в электросети
Но, несмотря на очевидные преимущества есть и ряд недостатков. Это сложность пусковой конструкции и высокая цена агрегата. Синхронные моторы используются для запуска механизмов, которым не нужно перемена частоты оборотов.
Но и запитка роторной обмотки требует источник постоянного тока, а корректировать частоту вращений индуктора можно при помощи трансформаторов, а это тоже дорого стоит. Выходит, что «синхронники» используют тогда, когда не требуется часто отключать или включать конкретный прибор.