Зачем нужен преобразователь частоты
Частотный преобразователь — незаменимое оборудование в любой сфере, где используются электродвигатели. Он обеспечивает плавный пуск, непрерывное автоматическое регулирование скорости и момента во время работы, а также множество других параметров работы электродвигателя. В ряде применений преобразователи обеспечивают снижение потребления электроэнергии до 50 %. Современные ПЧ с широтно-импульсной модуляцией (ШИМ) способны снижать пусковые токи в среднем в 4-5 раз и выдерживать перегрузки до 200 %.
На сегодняшний день в интернете можно найти большое количество рекомендаций и советов по подбору ПЧ, однако в большинстве случаев они являются общими, неконкретными и никак не применимыми на практике. Как же сориентироваться в огромном количестве критериев и выбрать подходящее оборудование? Рекомендации дают специалисты IEK GROUP, одного из ведущих российских производителей и поставщиков электротехнического оборудования: Артем Мошечков (ведущий инженер) и Петр Ивлев (специалист по техническому обучению Академии IEK GROUP).
— Зачем устанавливать и использовать преобразователь частоты?
Артем Мошечков: «Данное оборудование решает сразу несколько задач: управляет скоростью вращения электродвигателя, защищает его и в определенных режимах обеспечивает энергосбережение. ПЧ снижает слишком большой пусковой ток и момент, исключая удары, рывки и повышенные механические нагрузки на привод. Также преобразователь частоты позволяет защищать электродвигатель при коротком замыкании, страхует при отклонениях от номинального напряжения сети, контролирует температуру механизма, не допускает перегрева. Таким образом ПЧ обеспечивает более длительную и надежную работу привода, минимизирует затраты на обслуживание и ремонт. Кроме того, в определенных сферах применения и режимах работы преобразователь частоты снижает потребление электроэнергии на 30-50 %».
— Есть задача: выбрать и купить преобразователь частоты. С чего начать?
Петр Ивлев: «Модельный и функциональный ряд современного оборудования предлагает множество вариантов для решения широкого спектра задач. От самых простых до обеспечивающих управление сложнейшими автоматизированными электроприводами. Существует несколько основных критериев, основываясь на которых следует принимать решение о выборе той или иной модели частотного преобразователя».
Чтобы подобрать нужный вариант ПЧ, необходимо прежде всего определиться: для каких именно целей выбирается оборудование, какие конкретные задачи оно должно выполнять. Разумеется, необходимо знать условия эксплуатации и основные характеристики электродвигателя, для управления которым необходим ПЧ.
Современные серии преобразователей частоты включают до нескольких десятков моделей. Например, в линейке CONTROL-L620 IEK®, выведенной на рынок нашей компанией в 2017 году, представлено оборудование от 0,75 до 560 киловатт. В семействе CONTROL-А310 IEK® диапазон мощностей — до 22 киловатт, при этом уже с 11 киловатт есть возможность изготовить преобразователь со встроенным дросселем постоянного тока, что продлевает срок службы преобразователя. Номинальные напряжения — 220 и 380 В.
Такой бренд, как ONI®, предлагает сразу четыре марки частотных преобразователей: ONI-А400, ONI-М680, ONI-A650 и ONI-К800 — в диапазоне мощностей от 0,4 до 132 кВт.
— Мощность, номинальный ток, напряжение питающей сети: как сориентироваться в этих параметрах?
Петр Ивлев: «Указанные критерии очень важны для оптимальной работы оборудования».
- Мощность ПЧ должна быть равна мощности двигателя либо превышать ее. В случаях «тяжелого» применения, с высокими пусковыми нагрузками, допускается, чтобы мощность преобразователя была выше на одну, реже — на две ступени. Современные преобразователи частоты имеют большой диапазон мощности. Опять же обратимся к конкретным примерам оборудования: в линейке серии CONTROL-A310 представлены модели с мощностью от 0,4 до 22 кВт в режиме HD и от 0,75 до 22 кВт в режиме ND. Преобразователи частоты CONTROL-L620 поддерживают мощность в режиме HD от 0,75 до 500 кВт, в режиме ND — от 1,5 до 560 кВт. Есть и более узкий разбег: например, ПЧ линейки ONI-А400 работают в пределах мощности от 0,2 до 3,7 кВт.
- Следующий критерий — номинальный ток. Электропривод не работает в идеальном режиме — всегда есть вероятность изменений динамических нагрузок на валу или превышения значений номинального тока. Поэтому наряду с мощностью при выборе ПЧ обращают внимание на номинальный ток электродвигателя и преобразователя частоты. Рабочее значение данного параметра у ПЧ берется либо с запасом относительно номинального тока двигателя, либо номинал в номинал. Это делается для того, чтобы обезопасить электропривод от возможных перегрузок.
- Если говорить о напряжении питающей сети, то самыми распространенными моделями, которые используются на производстве, в ЖКХ и прочих сферах народного хозяйства, являются преобразователи напряжения 220 и 380 В. Напомню: значение данного параметра питающей сети и электродвигателя должно быть одинаковым.
— Какой преобразователь частоты лучше — однофазный или трехфазный?
Артем Мошечков: «В интернете можно прочитать, что однофазный преобразователь частоты обладает менее широким спектром возможностей, но это не так. Он способен решать все поставленные задачи».
На вход инвертора такого ПЧ подается однофазное напряжение соответствующей сети, которое на выходе формируется в трехфазное с частотой от 0 до 400 и выше Гц. Таким образом, при помощи однофазного ПЧ можно подключить обычный асинхронный трехфазный двигатель к однофазной сети. Для этого требуется подключить двигатель к преобразователю, правильно скоммутировав обмотки двигателя (на напряжение 220 В). Такие преобразователи частоты есть в семействе ONI — это серия А400, которая предназначена для управления асинхронными двигателями в системах небольшой мощности, но с большими перегрузками.
Трехфазные преобразователи частоты более распространены. Они преобразуют напряжение трехфазной промышленной сети и регулируют большое количество параметров электродвигателя.
Примеры оборудования:
- CONTROL-A310 IEK®,
- CONTROL-L620 IEK®,
- ONI-А400,
- ONI-М680,
- ONI-A650,
- ONI-К800.
ВЛИЯНИЕ ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ НА КОЭФФИЦИЕНТ ПОЛЕЗНОГО ДЕЙСТВИЯ АСИНХРОННОГО ДВИГАТЕЛЯ
Опубликовано в 2022, Выпуск № 8(62) Август 2022, ТЕХНИЧЕСКИЕ НАУКИ | Нет комментариев
Федянин В.В.
ORCID: 0000-0003-3126-9865, аспирант,
Омский государственный технический университет
ВЛИЯНИЕ ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ НА КОЭФФИЦИЕНТ ПОЛЕЗНОГО ДЕЙСТВИЯ АСИНХРОННОГО ДВИГАТЕЛЯ
Аннотация
В настоящей работе рассмотрен вопрос влияния преобразователя частоты на эффективность работы асинхронного двигателя. Проведены натурные эксперименты и в пакете MATLAB приложении Simulink разработана имитационная модель, которая позволяет оценивать потребленную и полезную мощность, cosφ, т. е. энергетическую эффективность асинхронного электропривода с синусоидальным напряжением и напряжением, сформированным с помощью широтно-импульсной модуляции. По результатам исследования установлено, что эффективность асинхронного двигателя подключенного к преобразователю частоты снижается на 3-7% в отличие от питания чистым синусоидальным напряжением.
Ключевые слова: частотно-регулируемый электропривод, преобразователь частоты, эффективность асинхронного двигателя, хаотическая широтно-импульсная модуляция.
Fedyanin V.V.
ORCID: 0000-0003-3126-9865, Postgraduate Student,
Omsk State Technical University
IMPACT OF THE FREQUENCY CONVERTER ON THE EFFICIENCY FACTOR OF THE INDUCTION MOTOR
Abstract
In this paper, we consider the question of frequency converter impact on the efficiency of an induction motor. We conducted full-scale experiments in the MATLAB and Simulink. We developed a simulation model that allows estimating consumed and useful power, cosφ, i.e., energy efficiency of an induction electric drive with sinusoidal voltage and voltage generated by pulse width modulation. According to the results of the study, it is established that the efficiency of an induction motor connected to the frequency converter is reduced by 3-7%, in contrast to the supply by pure sinusoidal voltage.
Keywords: frequency-controlled electric drive, frequency converter, induction motor efficiency, chaotic pulse width modulation.
Введение
Асинхронный двигатель (АД) имеет широкое применение в качестве электрических машин. Около половины электроэнергии, производимой в развитой стране, в конечном итоге потребляется электрическими двигателями, из которых более 90% являются АД. В течение относительно длительного периода времени АД в основном применялись для общего назначения в системах с постоянной скоростью вращения ротора. Тем не менее, быстрое развитие мощных электронных устройств и преобразовательных технологий за последние несколько десятилетий позволило обеспечить эффективное регулирование скорости путем изменения частоты, что привело к появлению частотно-регулируемых асинхронных двигателей. Применение преобразователей частоты (ПЧ) в паре с АД обладает преимуществами по сравнению с другими решениями по регулированию скорости [1]. К основным преимуществам частотно-регулируемого электропривода относятся:
– плавное регулирование скорости вращения ротора электродвигателя,
– плавный пуск электродвигателя,
– высокая жесткость механических характеристик одновременно с экономичностью привода.
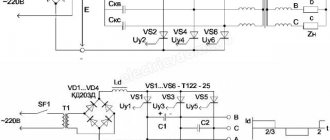
ПЧ состоит из выпрямителя, фильтрующего звена, инвертора и системы управления (СУ). Цепь выпрямителя преобразует переменное напряжение в постоянное пульсирующее с помощью диодного мостового выпрямителя. Фильтрующее звено сглаживают пульсации выпрямленного напряжения. На вход инвертора с выхода фильтрующего звена поступает постоянное напряжение, которое инвертор преобразует в трехфазное переменное. Наиболее часто схема силовой части инвертора выполнена как трехфазная мостовая схема, которая состоит из шести IGBT транзисторов, обладающих двухсторонней проводимостью. Регулирование выходной частоты осуществляется воздействием сигналами управления СУ на инвертор. В СУ инвертора задающий сигнал преобразуется в серию импульсов, подаваемых на IGBT транзисторы инвертора, тем самым обеспечивая возможность регулировки амплитуды выходного напряжения и частоты. Выходное переменное напряжение определяется значением выпрямительного напряжения.
В большинстве случаев используют статические преобразователи частоты с использованием широтно-импульсной модуляции (ШИМ) [2, 3]. Эффективность современных ПЧ составляет около 95 %. Использование ШИМ вносит дополнительные гармонические компоненты, наличие которых отрицательно сказывается на производительности и эффективности электродвигателя. Таким образом, ПЧ влияет на характеристики АД и создает помехи в питающей сети. Вследствие этого коэффициент полезного действия (КПД) АД подключенного к ПЧ снижается [4 – 6]. Наличие гармоник главным образом увеличивает электрические потери в меди. Увеличение потерь приведет к увеличению температуры двигателя и как следствие уменьшает его КПД.
В связи с вышеизложенным исследование КПД асинхронного двигателя подключенного к ПЧ является актуальной задачей.
Теоретическая часть
В программе Simulink пакета Matlab была разработана имитационная модель для расчета электрических параметров рис.1. Модель позволяет определить среднеквадратичное значение тока IRMS, напряжения URMS, подводимую мощность Pвх, отдаваемую мощность Pвых, реактивную мощность Q, cosφ и КПД асинхронного двигателя [7 – 10]. Чтобы обеспечить работу имитационной модели необходимо с помощью АЦП получить данные фазного напряжения и тока, а также напряжения на нагрузке и передать их в модель в виде числовых массивов. Далее произойдет обработка сигналов по амплитуде.
Рис. 1 – Имитационная модель
В блоках 1, 2 представленной модели формируются, и масштабируется с учетом коэффициентов трансформации датчиков, действующее значение напряжения и тока. Блоками RMS вычисляется истинное среднеквадратичное значение входного сигнала
, (1)
где – сигнал, поступающий на вход блока, T – период, – основная частота.
Истинное среднеквадратичное значение входного сигнала вычисляется по алгоритму скользящего среднего, который находит широкое применение в обработке сигналов и статистике. Далее блоком Power определяется активная, реактивная мощность и cosφ. Измеряемая мощность распределена во всех фазах заведомо равномерно. Потребляемая АД мощность определяется следующим образом
(2)
В блоке 3 производится расчет полезной мощности.
Экспериментальная часть
На экспериментальной установке (рис. 2) определение КПД асинхронного двигателя производилось в соответствие с ГОСТ 25941-83. Использован метод взаимной нагрузки, при котором две машины механически соединяются друг с другом. Машина М1 работает в режиме двигателя (АД) от трехфазного источника, машина М2 – в режиме генератора (генератор постоянного тока (ГПТ)) на реостат. Мощность на валу М1 определяется по выражению
(3)
где – мощность, идущая на потери в обмотках якорной цепи нагрузочной машины ( = 9.8 Ом); – механические потери агрегата М1-М2; U, I – напряжение и ток на нагрузке Rн. Так как скорость вращения ротора в ходе экспериментов одинакова, то механическими потерями пренебрегаем.
Рис. 2 – Схема установки для проведения эксперимента
Измерения фазных токов и напряжений осуществлялись с помощью датчиков на эффекте Холла. Датчики обеспечивают гальваническую развязку между выходными и входными цепями. С выхода датчиков ДН1-ДН3 снимались сигналы трех фаз мгновенных фазных значений напряжения, с выхода датчиков ДТ1-ДТ3 мгновенные значения тока. Датчик ДН снимал напряжение на нагрузке Rн.
Для проведения эксперимента выбран АД с короткозамкнутым ротором марки 4АА50В4У3, параметры которого приведены в таблице 1.
Таблица 1 – Технические данные АД
| Тип двигателя | Мощность, кВт | При номинальной нагрузке | mп | mM | mк | iп | ||
| Скольжение, % | КПД, % | cosφ | ||||||
| 4АА50В4У3 | 0,09 | 8,6 | 55 | 0,60 | 2,0 | 1,7 | 2,2 | 2,5 |
В первой части эксперимента АД подключался к ПЧ, испытания проводились с фиксированной частотой 50Гц, среднеквадратичное фазное напряжение составило 191,2В. Во второй части эксперимента АД подключался к трехфазному регулируемому источнику с выходным синусоидальным напряжением и коэффициентом гармонических искажений менее 5%. Среднеквадратичное фазное напряжение составило 189,5В с частотой 50Гц. На (рис. 3а, б) представлены среднеквадратичные значения фазных токов и напряжений.
Рис. 3 – Среднеквадратичные значения фазных и напряжений (а), среднеквадратичные значения фазных и токов (б),
При этом мгновенные значения напряжения и тока, поступающие на вход модели, проиллюстрированы на (рис. 4а, б).
Рис. 4 – Мгновенные значения фазного тока и напряжения при подключении трехфазного синусоидального источника напряжения (а), мгновенные значения фазного тока и напряжения при подключении преобразователя частоты (б)
На (рис. 5а, б) представлены зависимости входной Pвх и выходной Pвых мощности для случая с входным синусоидальным напряжением и с напряжением генерируемым ПЧ.
Рис. 5 – Входная мощность Pвх (а), выходная мощность Pвых (б)
Из (рис. 5а) видно, что входная мощность при использовании ПЧ является не постоянной, максимальное значение находится на уровне . Мощность при питании синусоидальным напряжением является постоянной и составляет . При этом полезная мощность в обоих случаях (рис. 5б). На (рис. 6а, б) представлены зависимости КПД АД и cosφ. Из рисунка (рис.6а) видно, что минимальное значение КПД при использовании ПЧ , в то время как КПД АД работающего от синусоидального напряжения .
Рис. 6 – Коэффициент полезного действия (а), cosφ (б)
Заключение
Выводы, сделанные на основании результатов экспериментов и разработанной имитационной модели:
– АД, подключенный к ПЧ, имеет эффективность на 3-7% меньше, чем при питании чистым синусоидальным напряжением. Увеличением потерь связано появлением высших гармоник;
– При работе АД от ПЧ, необходимо оценивать эффективность не только системы в целом, но и электродвигателя;
– Чтобы определить более точно значения потребляемой мощности, необходимо использовать истинное определение действующего значения.
Список литературы / References
- Браславский И. Я., Ишматов З. Ш., Поляков В. Н. Энергосберегающий асинхронный электропривод // М.: Академия. – 2004. – Т. 256. – 202 c.
- Федоров В. К., Федянин В. В. Алгоритм формирования широтно-импульсной модуляции с несущей частотой в режиме детерминированного хаоса //Омский научный вестник. – 2022. – №. 2 (152). – C. 45 – 49.
- Обухов С. Г., Чаплыгин Е. Е., Кондратьев Д. Е. Широтно-импульсная модуляция в трехфазных инверторах напряжения //Электричество. – 2008. – №. – С. 23-31.
- Андриенко В. М. Определение энергетических показателей асинхронных двигателей при питании от статических преобразователей частоты // Электротехника и электромеханика. – 2010. – №. 3. – C. 5 – 7.
- Михеев К. Е., Томасов В. С. Анализ энергетических показателей многоуровневых полупроводниковых преобразователей систем электропривода // Научно-технический вестник информационных технологий, механики и оптики. – 2012. – №. 1 (77). – C. 46 – 52.
- Боярская Н. П., Довгун В. П. Влияние гармонического состава токов и напряжений на эффективность энергосбережения //Вестник Красноярского государственного аграрного университета. – 2010. – №. – C. 130 – 133.
- Квашнин В. О., Ткаченко Б. И. Методика косвенного определения динамического коэффициента мощности асинхронного электродвигателя //Электромашиностроение и электрооборудование. – 2006. – №. – С. 230-231.
- Захаренко В. С., Дорощенко И. В. Особенности иммитационного моделирования асинхронного двигателя для составления модели с учетом коммутации и при несимметричных схемах включения //Вестник Гомельского государственного технического университета им. ПО Сухого. – 2011. – №. 3 (46). – C. 58 – 63.
- Козлов Д. В., Змиева K. A., Шумихина Е. М. Экспериментальная установка для исследования характеристик двигателя при различных нагрузках и питающих напряжениях ЭП-1 //Электротехнические комплексы и системы управления. – 2011. – №. – С. 12-18.
- Петренко А. Н. Экспериментальное исследование нагрева частотно-управляемого асинхронного двигателя при различных источниках питания //Электротехника и электромеханика. – 2010. – №. – C. 21 – 23.
Список литературы на английском языке / References in English
- Braslavskij I. Ja., Ishmatov Z. Sh., Poljakov V. N. Jenergosberegajushhij asinhronnyj jelektroprivod / I. Ja. Braslavskij, Z. Sh. Ishmatov, V. N. Poljakov // M.: Akademija. – 2004. – V. 256. – 202 p. [in Russian]
- Fedorov V. K., Fedjanin V. V. Algoritm formirovanija shirotno-impul’snoj moduljacii s nesushhej chastotoj v rezhime determinirovannogo haosa / Fedorov V. K., Fedjanin V. V. //Omskij nauchnyj vestnik [Omsk Scientific Bulletin]. – 2022. – №. 2 (152). – P. 45 – 49. [in Russian]
- Obuhov S. G., Chaplygin E. E., Kondrat’ev D. E. Shirotno-impul’snaja moduljacija v trehfaznyh invertorah naprjazhenija / Obuhov S. G., Chaplygin E. E., Kondrat’ev D. E. // Jelektrichestvo [Electricity]. – 2008. – №. 7. – P. 23-31. [in Russian]
- Andrienko V. M. Opredelenie jenergeticheskih pokazatelej asinhronnyh dvigatelej pri pitanii ot staticheskih preobrazovatelej chastity / V. M. Andrienko // Jelektrotehnika i jelektromehanika [Electrical engineering]. – 2010. – №. 3. – P. 5 – 7.
- Miheev K. E., Tomasov V. S. Analiz jenergeticheskih pokazatelej mnogourovnevyh poluprovodnikovyh preobrazovatelej sistem jelektroprivoda / K. E. Miheev, V.S. Tomasov // Nauchno-tehnicheskij vestnik informacionnyh tehnologij, mehaniki i optiki . – 2012. – №. 1 (77). – P. 46 – 52.
- Bojarskaja N. P., Dovgun V. P. Vlijanie garmonicheskogo sostava tokov i naprjazhenij na jeffektivnost’ jenergosberezhenija / Bojarskaja N. P., Dovgun V. P. // Vestnik Krasnojarskogo gosudarstvennogo agrarnogo universiteta . – 2010. – №. 4. – P. 130 – 133.
- Kvashnin V. O., Tkachenko B. I. Metodika kosvennogo opredelenija dinamicheskogo kojefficienta moshhnosti asinhronnogo jelektrodvigatelja / Kvashnin V. O., Tkachenko B. I. //Jelektromashinostroenie i jelektrooborudovanie [Electrical machinery and electrical equipment]. – 2006. – №. 66. – P. 230-231.
- Zaharenko V. S., Doroshhenko I. V. Osobennosti immitacionnogo modelirovanija asinhronnogo dvigatelja dlja sostavlenija modeli s uchetom kommutacii i pri nesimmetrichnyh shemah vkljuchenija / Zaharenko V. S., Doroshhenko I. V. //Vestnik Gomel’skogo gosudarstvennogo tehnicheskogo universiteta im. PO Suhogo . – 2011. – №. 3 (46). – P. 58 – 63.
- Kozlov D. V., Zmieva K. A., Shumihina E. M. Jeksperimental’naja ustanovka dlja issledovanija harakteristik dvigatelja pri razlichnyh nagruzkah i pitajushhih naprjazhenijah JeP-1 / Kozlov D. V., Zmieva K. A., Shumihina E. M. // Jelektrotehnicheskie kompleksy i sistemy upravlenija . – 2011. – №. 1. – P. 12-18.
- Petrenko A. N. Jeksperimental’noe issledovanie nagreva chastotno-upravljaemogo asinhronnogo dvigatelja pri razlichnyh istochnikah pitanija / Petrenko A. N. // Jelektrotehnika i jelektromehanika . – 2010. – №. 5. – P. 21 – 23.
О способах управления
В интернете много теоретической информации о том, какой вариант лучше. На самом деле основывать свой выбор надо не на оценках метода управления, а на области применения преобразователя частоты. В оборудовании, которое работает с кранами, подъемными механизмами или протяжными станками используется векторный способ. В насосах и вентиляторах, то есть в тех механизмах, где скорость практически не меняется, обычно используется скалярный. Оба этих метода решают одну задачу: регулировки скорости и изменения момента.
— Что такое ПИД-регулятор, управляющие входы/выходы, и насколько это важно?
Петр Ивлев: «Пропорционально-интегрально-дифференцирующий регулятор (ПИД-регулятор) управляет внешними процессами, анализируя сигналы обратной связи, поступающие на преобразователь частоты. Этот регулятор есть в 95 % современных преобразователей частоты».
Самый простой пример его использования: требуется поддерживать постоянное давление в трубе 5 Бар. ПЧ считывает сигналы с датчиков, а ПИД-регулятор за счёт математических алгоритмов обеспечивает необходимый режим работы ПЧ.
Советуем к прочтению: Умножитель постоянного напряжения своими руками
ПЧ считывает сигналы с датчиков, а ПИД-регулятор за счёт математических алгоритмов обеспечивает необходимый режим его работы.
Область применения
Производителями предлагается широкий ассортимент приводов, используемых в областях, где задействованы электродвигатели. Идеальное решение для всех видов нагрузки, в том числе насосов и вентиляторов. Системы среднего класса используются на угольных электростанциях, в горнодобывающей промышленности, на мельницах, в жилищно-коммунальном хозяйстве и т. д. Диапазон номиналов выглядит таким образом: 3 кВ, 3.3 кВ, 4.16 кВ, 6 кВ, 6.6 кВ, 10 кВ и 11 кВ.
С появлением регулируемого электропривода контроль давления воды у конечного потребителя не вызывает проблем. Интерфейс с продуманной структурой сценариев отлично подходит для управления насосным оборудованием. Благодаря компактной конструкции, привод может быть установлен в шкаф различного исполнения. Продукты нового поколения обладают свойствами передовой техники:
- высокая скорость и точность управления в векторном режиме;
- существенная экономия электроэнергии;
- быстрые динамические характеристики;
- большой низкочастотный вращающий момент;
- двойное торможение и т. д.
Классификация преобразователей частоты
По типу питающего напряжения преобразователи частоты делятся на разновидности:
- однофазные;
- трехфазные;
- высоковольтные аппараты.
Основную задачу преобразователя частоты можно сформулировать следующим образом: перевод рабочего процесса на экономичный режим с помощью управления скоростью и моментом двигателя, согласно заданным техническим параметрам и характеру нагрузки.
При этом цифровой дисплейприбора показывает такие параметры работы системы, как:
- величина I и U двигателя;
- выходные значения частоты, скорости, мощности и момента (f, v, Р и М);
- отображение состояния дискретных входовдля регулирования скорости вращения вала АД и дистанционного управления системой;
- продолжительность работы самого частотного преобразователя.
По сфере использования типы инверторы бывают:
- промышленного назначения мощностью до 315 кВт;
- ПЧ с векторным управлением мощностью до 500 кВт;
- для управления механизмами с насосно-вентиляторным типом нагрузки (Р 15 — 315 кВт);
- частотники для кранов и других подъемных конструкций;
- для применения в условиях взрывоопасности;
- устанавливаемые ЧРП прямо на электродвигатель.
Техника безопасности при подключении преобразователя частоты
Следует выделить несколько основных правил безопасности, о которых нужно помнить при выполнении работ по подключению частотных преобразователей:
- Категорически запрещается касаться любой частью тела к токоведущим элементам цепи. Это может нанести ущерб вашему здоровью или даже лишить жизни. Перед началом работ рекомендуется полностью обесточить оборудование и использовать специальные электромонтажные инструменты с защитой от ударов током.
- Стоит помнить, что даже после угасания индикаторов на устройстве в цепи может оставаться напряжение. Чтобы избежать ударов током при работе с системами до 7 кВт необходимо выждать 5 минут до начала работ, с агрегатами свыше 7 кВт – 15 минут. Этого времени должно хватить, чтобы все конденсаторы в цепи разрядились.
- Заземление является неотъемлемой частью любой электрической цепи, включая цепь частотный преобразователь-двигатель. Оно должно устанавливаться в виде отдельного кабеля и ни в коем случае не может присоединяться к нулевой шине.
- Стоит помнить, что отключения частотного преобразователя не гарантирует, что в других узлах сети не осталось напряжения, поэтому перед ремонтом или обслуживанием необходимо полностью отключить цепь от сети.
Выполнять работы по подключению преобразователей частоты могут только квалифицированные специалисты, имеющие соответствующую подготовку, а также необходимые допуски.
Как подключить и настроить преобразователь частоты?
Общая схема подключения асинхронного электродвигателя с применением частотного преобразователя в принципе не сложная, так как вся основная разводка заключается в корпусах приборов. Для технаря, владеющего практикой, разобраться в ней не составит сложности. В схеме место для преобразователя выделяется сразу после автоматического выключателя с номинальным током, равным номиналу электрического двигателя. При монтаже преобразователя в 3-х фазную сеть необходимо задействовать трехполюсный автомат,имеющий общий рычаг. При перегрузке это позволит мгновенно отключить все фазы от сети электроснабжения. Ток срабатывания должен быть равным току одной фазы электродвигателя. При однофазном питании, следует выбирать автоматический выключатель, с утроенным значением тока одной фазы.
Во всех случаях, монтаж инвертора должен осуществляться с включением автоматических выключателей в разрыв нулевого или заземляющего провода.
Практически настраивать частотный преобразователь – это значит, проводить подключение жил кабеля к видимым контактам электрического двигателя. Конкретное соединение определено характером напряжения, вырабатываемого непосредственно преобразователем частоты. Для 3-х фазных сетей на промышленных объектах электродвигатель подсоединяется «звездой» — этой схемой подразумевается параллельное подсоединение проводов обмоток. Для бытового применения в однофазных сетях применяется схема «треугольник» (где U вых не превышает U ном больше чем на 50%).
Пульт управления необходимо располагать втам, где будет комфортно пользоваться. Схема подключения пульта обычно отображена в пользовательской инструкции к частотному преобразователю. Перед установкой, до подачи электропитания рычаг нужно перевести в положение «выключено». После того должна загореться соответствующая индикаторная лампочка. По умолчанию для пуска аппарата требуется нажать на клавишу «RUN». Для плавного наращивания оборотов электродвигателя нужно не торопясь повернуть рукоятку пульта. При обратном вращении необходимо переустановить режим посредством кнопки реверса. Сейчас уже можнобудет перевести рукоятку в рабочее положение и установить требуемую скорость вращения. Стоит заметить, что на управляющих пультах отдельных ПЧ указывается не механическая частота вращения, а частота питающего напряжения.
Для чего нужна настройка частотного преобразователя
После того как все электрические подключения выполнены, для ввода в эксплуатацию требуется настроить преобразователь частоты. Процесс заключается в четырех основных пунктах, это:
- Настройка параметров электродвигателя – необходима для того, чтобы ПЧ адаптировался к конкретному двигателю.
- Внесение параметров для пуска и останова двигателя – от этих настроек зависит время пуска и останова двигателя, а также режим управления.
- Ввод защитных и ограничивающих уставок – на этом этапе определяется граничные значения различных параметров для защиты двигателя и самого частотника от выхода их из строя.
- Программирование дополнительных функций – это самый объемный и непостоянный пункт, так как в каждой конкретной задаче будут использоваться свои функции.
Правильное выполнение всех этапов программирования ПЧ позволит электродвигателю функционировать в оптимальном и безопасном режиме, защитит его от выхода из строя.
Этапы программирования и настройки частотного преобразователя
Выделим минимальный набор действий по настройке параметров преобразователя частоты:
- Ввод паспортных данных электродвигателя в ПЧ;
- Ввод принципа регулирования:
- Постоянная частота;
- Переменная частота – если выбран этот вариант, то требуется указать источник задания скорости вращения.
- Задать канал управления – то есть источник, откуда будет приходить команда запуска и останова.
После выполнения данных действий двигатель можно запустить, при этом следует убедиться в правильности вращения. Если вращение осуществляется неправильно, это можно изменить переключением фазных проводов или с помощью настройки частотного преобразователя.
Советуем к прочтению: Простые схемы для начинающих радиолюбителей
Прямой пуск, устройства плавного пуска или частотные преобразователи
Электромагнитный пускатель
Есть несколько способов запустить и управлять электродвигателем. В основном запуск двигателя происходит прямым пуском через электромагнитный пускатель. При таком подходе на двигатель подается полное напряжение, и он максимально быстро развивает номинальную скорость.
Проблема с которой сталкиваются операторы при прямом пуске заключается в том, что импульс пускового тока может в 7 раз превышать ток полной нагрузки двигателя. В течение очень короткого периода времени на двигатель и его элементы подается очень сильный импульс тока. Если мощный двигатель будет часто запускаться и останавливаться, то он быстрее износится и выйдет из строя, а также может вывести из строя исполнительный механизм работающий от него.
Устройство плавного пуска
Напротив, устройство плавного пуска сокращает пусковые токи до 2-4 крат, уменьшая нагрузку и крутящий момент, прилагаемый к двигателю. Такой подход позволяет двигателю разгоняться со скоростью, которая определяется настройкой самого устройства плавного пуска. Оператор может установить конкретное время разгона, и с момента запуска до назначенного времени двигатель будет плавно разгоняться. Такой подход позволяет снизить пусковой ток, снизить риск преждевременного выхода из строя оборудования и сэкономить немного электроэнергии. Устройства плавного пуска идеально подходят в тех случаях, где линейное изменение скорости и управление крутящим моментом являются критически важными компонентами, а также в системах трубопроводов, чтобы избежать гидроударов при пуске и останове насосов.
Частотный преобразователь
ЧРП продвигает эту концепцию на шаг вперед, позволяя оператору всегда контролировать пусковой ток и скорость вращения электродвигателя. ЧРП может управлять двигателем как во время цикла пуска/останова, так и в течение всего времени его работы. ЧРП необходим там, где требуется полный контроль скорости, а основной проблемой является повышенное потребление энергии.
По первоначальным вложениям средств устройство плавного пуска является менее дорогим вариантом, но экономический эффект от внедрения преобразователя частоты может в разы окупить его стоимость.
Принцип действия преобразователя частоты
Первооснову привода определяет инвертор двойного преобразования. Принцип действия заключается в том, чтобы:
- входной переменный токсинусоидального типа 380 либо 220В выпрямляется блоком диодов;
- потом фильтруется посредством конденсаторов для минимизации пульсации напряжения;
- дальше напряжение подаётся на микросхемы и мосты транзисторов, создающие из него 3-х фазную волнус установленными параметрами;
- на выходе прямоугольные импульсы превращаются в синусоидальное напряжение.
Схема частотного преобразователя
Ниже представлена типовая схема частотного преобразователя. Входное сетевое трехфазное или однофазное напряжение подается через опциональный входной фильтр на клеммы диодного моста. Неуправляемый диодный (или управляемый тиристорный) мост преобразует переменное напряжение сети в постоянное пульсирующее напряжение. Для фильтрации пульсаций служит звено постоянного тока из одного или нескольких конденсаторов C.
Схема преобразователя частоты
Напряжение в звене постоянного тока после выпрямления трехфазного напряжения будет равно согласно формуле: 380*1,35 = 513 В.
Дроссель DCL в звене постоянного тока позволяет дополнительно сгладить пульсации напряжения после диодного моста и выполняет функции снижения гармоник выпрямителя, инжектируемых в питающую сеть.
Транзисторы T1-T6 инвертора с помощью специального алгоритма системы управления генерируют на клеммы электродвигателя 3 пакета импульсов, разнесенных по трем фазам на 120 градусов во времени. Ни рисунке ниже показана только одна фаза: пачка выходных импульсов широтно-импульсной модуляции (ШИМ), проходя через обмотку электродвигателя, сгладится до формы, напоминающей синусоиду. Частота импульсов ШИМ (опорная частота) в промышленных преобразователях обычно составляет 3-4 кГц, но для ПЧ малой мощности может доходить до 16 кГц. Чем выше частоты ШИМ, тем будет меньше гармонических искажений «синусоиды» на выходе инвертора. Но при этом возрастают тепловые потери на силовых транзисторах, что уменьшает КПД. В ПЧ Toshiba величину частоты можно изменять, регулируя таким образом тепловые потери.
ШИМ инвертора
Выходное напряжение частотного преобразователя будет всегда ниже входного сетевого напряжения. Это связано с потерями в силовом модуле и алгоритме получения ШИМ импульсов.
Между частотным преобразователем и электродвигателем можно установить дополнительный фильтр, позволяющий значительно улучшить форму выходного напряжения после частотника. Это необходимо для того, чтобы импульсы ШИМ не разрушали изоляцию обмоток двигателя и не вызывали перенапряжения на конце длинного кабеля. Подробнее о выходных фильтрах.
Особенности применения ПЧ для различного оборудования
— Преобразователь частоты для насосного оборудования: что он дает?
Артем Мошечков: «В случае с насосным оборудованием чаще всего требуется защитить трубопровод от гидроударов во время запуска насоса, а сам электропривод — от преждевременного выхода из строя и работы в аварийном режиме. Немаловажное значение имеет оптимизация расхода электроэнергии и поддержание постоянного давления в системе водоснабжения».
Для решения этих задач требуется обеспечить плавный пуск насосов и плавное же изменение частоты вращения электродвигателя. Причем диапазон значений должен быть достаточно широк: во время пиковой нагрузки электропривод работает на номинальных оборотах, обеспечивая необходимый расход воды. При малом разборе поддерживается в рабочем состоянии, потребляя тот минимум электроэнергии, который необходим в данный момент. Также в сфере ЖКХ с помощью ПЧ возможно создание автоматизированной каскадной системы насосов, когда, в зависимости от разбора воды в жилых домах, работает один насос или, например, три. С помощью специальных функций преобразователь частоты позволяет экономить электроэнергию — это происходит за счет автоматической остановки работающего насоса при отсутствии расхода воды в системе.
С этой задачей справятся ПЧ следующих серий: CONTROL-A310 IEK®, CONTROL-L620 IEK®, ONI-А400, ONI-M680. Однако наиболее удачным выбором станет преобразователь частоты ONI-A650, разработанный специально для применения в системах вентиляции и насосных установках. Уже в базовой конфигурации он содержит специальную плату каскадного управления насосами, что позволяет объединить до 5 насосов в единый каскад.
Мнение: Преобразователь частоты ONI-К800 был применен в приводе насоса системы водоснабжения и в приводе конвейера. Зарекомендовал себя с положительной стороны. При настройке и в ходе эксплуатации легко монтировались силовые и контрольные кабели, преобразователь просто настраивался с лицевой панели. Обладает большим функционалом защит, большим количеством входов-выходов. Начальник отдела ЭМП АО «Уралгипромез» Д.Н. Томашевский.
— Какие преобразователи частоты подойдут для грузоподъемных механизмов (крановое оборудование, лебёдки)?
Петр Ивлев: «Современный крановый механизм — очень сложная система. Поэтому преобразователь частоты для электропривода такого механизма должен соответствовать высоким требованиям: обладать высокой перегрузочной способностью (до 200 %), уметь управлять механическим тормозом электродвигателя, иметь возможность подключения тормозного резистора (встроенный тормозной модуль) и организации обратной связи для регуляции скорости вращения электродвигателя. Последняя необходима для обеспечения быстрого обмена информацией между звеньями системы, непрерывного мониторинга всех процессов и точного управления параметрами во время работы сложнейшего кранового механизма».
Преобразователи частоты для электродвигателей грузоподъемных механизмов позволяют организовать надежное управление электроприводом при подъеме и опускании груза, поворотах стрелки, обеспечивая вертикальное и горизонтальное перемещение без раскачивания, с различными скоростями, таким образом гарантируя максимальную производительность.
В зависимости от модели крана, это могут быть следующие виды частотных преобразователей:
- для обеспечения плавного перемещения крана можно порекомендовать серии CONTROL-L620 IEK®, ONI-M680 и ONI-K800;
- для надежной работы лебёдки подъёма, в зависимости от задачи, подойдут М680 и К800.
— Как преобразователь частоты работает в случае с транспортерным и конвейерным оборудованием?
Артем Мошечков: «При запуске таких механизмов возникает пусковой ток, превышающий номинальный в 6-7 раз, а также — большая нагрузка на детали механизма и, как следствие, повышенный износ узлов или перегрев электродвигателя. Это самая частая причина отказов подобного оборудования. Далее, в процессе работы привод обычно вращается с одинаковой скоростью. Поэтому для механизмов непрерывного транспорта очень важны плавный разгон и торможение без рывков, пробуксовок, остановок, а также постоянная заданная скорость движения. Следовательно, преобразователь частоты для такого оборудования решает задачи по обеспечению постоянной скорости транспортера или конвейера, повышению уровня надежности (так как значительно снижает количество отказов как механического, так и электрического происхождения), устранению перегрузок во время запуска».
Использование преобразователей частоты с электродвигателями конвейеров и транспортеров позволяет не просто автоматизировать запуск, регулирование скорости и остановки ленты, но и создавать более сложные алгоритмы работы оборудования (зависит от выбранной модели ПЧ и подключенных датчиков).
Советуем к прочтению: Виды батареек: подробная классификация элементов питания по размеру, составу и другим параметрам
Мнение: Преобразователь частоты CONTROL-L620 IEK® номинальной мощностью 5.5 был установлен на подающем конвейере в установке № 2 для сушки травяной муки. Режим работы преобразователя — круглосуточный «старт-стоп». Оборудование зарекомендовало себя с положительной стороны. Во время тестирования все функции работали в заявленном штатном режиме, замечаний во время эксплуатации выявлено не было. Заместитель генерального директора по IT ПАО «Птицефабрика Боровская» С.М. Солкин.
— Есть ли смысл использовать преобразователи частоты для вентиляторного оборудования?
Петр Ивлев: «Есть. ПЧ для вентиляторного оборудования регулирует скорость вращения вала электропривода, позволяя экономить на электричестве. В случае установки дополнительного датчика, который передает оперативные данные о текущей потребности в воздухе на преобразователь, последний изменяет скорость вращения электродвигателя. Это позволяет экономить электроэнергию на 20-40 %. Кроме того, ПЧ надежно защищает электропривод вентилятора от бросков тока и перегрузок за счет плавного пуска и такой же плавной остановки вала».
Можно порекомендовать к установке на вентиляторное оборудование преобразователи частоты следующих серий: ONI-A650, CONTROL-A310 IEK®, CONTROL-L620 IEK®, ONI-A400.
— «Тяжелый» или «нормальный» режим работы преобразователя частоты — какой выбрать?
Артем Мошечков: «Современные ПЧ обеспечивают пуск и работу двигателей в нормальном или тяжелом режиме. Для их обозначения используются аббревиатуры ND — нормальный и HD — тяжелый».
В режиме ND величина вращающего момента постоянна, независимо от скорости вращения двигателя. В частности, таким образом работают насосы.
Тяжелый режим (НD) характеризуется нагрузкой с переменным вращающим моментом — как в случае с экструдерами, конвейерами или компрессорами. При этом существуют частотные преобразователи, которые поддерживают сразу два указанных режима, что позволяет экономить бюджет при проектировании различных систем. Например, преобразователи частоты IEK® серий CONTROL-A310 и L-620 могут работать как в ND-режиме, так и в режиме HD. Также оба режима поддерживают ПЧ ONI-М680.
Что такое частотно-регулируемый привод?
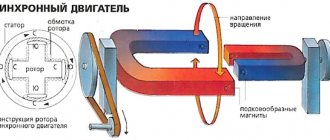
Частотно-регулируемый привод (частотно-управляемый привод, ЧУП, Variable requency Drive, VFD) — система управления частотой вращения ротора асинхронного (синхронного) электродвигателя. Состоит из собственно электродвигателя и частотного преобразователя.
Преобразователь частоты (частотный преобразователь) — это устройство состоящее из выпрямителя (моста постоянного тока), преобразующего переменный ток промышленной частоты в постоянный и инвертора (преобразователя) (иногда с ШИМ), преобразующего постоянный ток в переменный требуемых частоты и амплитуды. Выходные тиристоры (GTO) или IGBT обеспечивают необходимый ток для питания электродвигателя. Для исключения перегрузки преобразователя при большой длине фидера между преобразователем и фидером ставят дроссели, а для уменьшения электромагнитных помех — EMC-фильтр. При скалярном управлении формируются гармонические токи фаз двигателя. Векторное управление — метод управления синхронными и асинхронными двигателями, не только формирующим гармонические токи (напряжения) фаз, но и обеспечивающим управление магнитным потоком ротора (моментом на валу двигателя).
Применение частотного привода
Преобразователи частоты применяются в:
- судовом электроприводе большой мощности
- прокатных станах (синхронная работа клетей)
- высокооборотном приводе вакуумных турбомолекулярных насосов (до 100.000 об/мин.)
- конвейерных системах
- резательных автоматах
- станках с ЧПУ — синхронизация движения сразу нескольких осей (до 32 — например в полиграфическом или упаковывающем оборудовании) (сервоприводы)
- автоматически открывающихся дверях
- мешалках, насосах, вентиляторах, компрессорах
- бытовых кондиционерах
- стиральных машинах
- городском электротранспорте, особенно в троллейбусах.
Наибольший экономический эффект даёт применение ЧРП в системах вентиляции, кондиционирования и водоснабжения, где применение ЧРП стало фактически стандартом.
Преимущества применения ЧРП
- Высокая точность регулирования
- Экономия электроэнергии в случае переменной нагрузки (то есть работы эл. двигателя с неполной нагрузкой).
- Равный максимальному пусковой момент.
- Возможность удалённой диагностики привода по промышленной сети
- распознавание выпадения фазы для входной и выходной цепей
- учёт моточасов
- старение конденсаторов главной цепи
- неисправность вентилятора
- Повышенный ресурс оборудования
- Уменьшение гидравлического сопротивления трубопровода из-за отсутствия регулирующего клапана
- Плавный пуск двигателя, что значительно уменьшает его износ
- ЧРП как правило содержит в себе ПИД-регулятор и может подключатся напрямую к датчику регулируемой величины (например, давления).
- Управляемое торможение и автоматический перезапуск при пропадании сетевого напряжения
- Подхват вращающегося электродвигателя
- Стабилизация скорости вращения при изменении нагрузки
- Значительное снижение акустического шума электродвигателя, (при использовании функции «Мягкая ШИМ»)
- Дополнительная экономия электроэнергии от оптимизации возбуждения эл. двигателя
- Позволяют заменить собой автоматический выключатель
Недостатки применения частотного привода
- Большинство моделей ЧРП являются источником помех (требуется установка Фильтров высокочастотных помех)
- Сравнительно высокая стоимость для ЧРП большой мощности (окупаемость минимум 1-2 года)
Применение частотных преобразователей на насосных станциях
Классический метод управления подачей насосных установок предполагает дросселирование напорных линий и регулирование количества работающих агрегатов по какому-либо техническому параметру (например, давлению в трубопроводе). Насосные агрегаты в этом случае выбираются исходя из неких расчётных характеристик (как правило, с запасом по производительности) и постоянно функционируют с постоянной частотой вращения, без учета изменяющихся расходов, вызванных переменным водопотреблением. При минимальном расходе насосы продолжают работу с постоянной частотой вращения, создавая избыточное давление в сети (причина аварий), при этом бесполезно расходуется значительное количество электроэнергии. Так, к примеру, происходит в ночное время суток, когда потребление воды резко падает. Основной эффект достигается не за счет экономии электроэнергии, а благодаря существенному уменьшению расходов на ремонт водопроводных сетей.
Появление регулируемого электропривода позволило поддерживать постоянное давление непосредственно у потребителя. Широкое применение в мировой практике получил частотно регулируемый электропривод с асинхронным электродвигателем общепромышленного назначения. В результате адаптации общепромышленных асинхронных двигателей к их условиям эксплуатации в управляемых электроприводах создаются специальные регулируемые асинхронные двигатели с более высокими энергетическими и массогабаритностоимостными показателями по сравнению с неадаптированными. Частотное регулирование скорости вращения вала асинхронного двигателя осуществляется с помощью электронного устройства, которое принято называть частотным преобразователем. Вышеуказанный эффект достигается путём изменения частоты и амплитуды трёхфазного напряжения, поступающего на электродвигатель. Таким образом, меняя параметры питающего напряжения (частотное управление), можно делать скорость вращения двигателя как ниже, так и выше номинальной. Во второй зоне (частота выше номинальной) максимальный момент на валу обратно пропорционален скорости вращения.
Метод преобразования частоты основывается на следующем принципе. Как правило, частота промышленной сети составляет 50 Гц. Для примера возьмём насос с двухполюсным электродвигателем. С учетом скольжения скорость вращения двигателя составляет около 2800 (зависит от мощности) оборотов в минуту и даёт на выходе насосного агрегата номинальный напор и производительность (так как это его номинальные параметры, согласно паспорту). Если с помощью частотного преобразователя понизить частоту и амплитуду подаваемого на него переменного напряжения, то соответственно понизятся скорость вращения двигателя, и, следовательно, изменится производительность насосного агрегата. Информация о давлении в сети поступает в блок частотного преобразователя от специального датчика давления, установленного у потребителя, на основании этих данных преобразователь соответствующим образом меняет частоту, подаваемую на двигатель.
Современный преобразователь частоты имеет компактное исполнение, пыле и влагозащищённый корпус, удобный интерфейс, что позволяет применять его в самых сложных условиях и проблемных средах. Диапазон мощности весьма широк и составляет от 0,18 до 630 кВт и более при стандартном питании 220/380 В и 50-60 Гц. Практика показывает, что применение частотных преобразователей на насосных станциях позволяет:
- экономить электроэнергию (при существенных изменениях расхода), регулируя мощность электропривода в зависимости от реального водопотребления (эффект экономии 20-50 %);
- снизить расход воды, за счёт сокращения утечек при превышении давления в магистрали, когда расход водопотребления в действительности мал (в среднем на 5 %);
- уменьшить расходы (основной экономический эффект) на аварийные ремонты оборудования (всей инфраструктуры подачи воды за счет резкого уменьшения числа аварийных ситуаций, вызванных в частности гидравлическим ударом, который нередко случается в случае использования нерегулируемого электропривода (доказано, что ресурс службы оборудования повышается минимум в 1,5 раза);
- достичь определённой экономии тепла в системах горячего водоснабжения за счёт снижения потерь воды, несущей тепло;
- увеличить напор выше обычного в случае необходимости;
- комплексно автоматизировать систему водоснабжения, тем самым снижая фонд заработной платы обслуживающего и дежурного персонала, и исключить влияние «человеческого фактора» на работу системы, что тоже немаловажно.
По имеющимся данным срок окупаемости проекта по внедрению преобразователей частоты составляет от 3 месяцев до 2 лет.
Потери мощности при торможении электродвигателя
Во многих установках на регулируемый электропривод возлагаются задачи не только плавного регулирования момента и скорости вращения электродвигателя, но и задачи замедления и торможения элементов установки. Классическим решением такой задачи является система привода с асинхронным двигателем с преобразователем частоты, оснащённым тормозным переключателем с тормозным резистором.
При этом в режиме замедления/торможения электродвигатель работает как генератор, преобразуя механическую энергию в электрическую, которая в итоге рассеивается на тормозном резисторе. Типичными установками, в которых циклы разгона чередуются с циклами замедления являются тяговый привод электротранспорта, подъёмники, лифты, центрифуги, намоточные машины и т. п. Функция электрического торможения вначале появилась на приводе постоянного тока (например, троллейбус). В конце ХХ века появились преобразователи частоты со встроенным рекуператором, которые позволяют возвращать энергию, полученную от двигателя, работающего в режиме торможения, обратно в сеть. В этом случае, установка начинает «приносить деньги» фактически сразу после ввода в эксплуатацию.
Принцип работы частотного преобразователя
Частотные преобразователи
Остались вопросы? Специалисты ЭНЕРГОПУСК ответят на Ваши вопросы: 8-800-700-11-54
(8-18, Пн-Вт)
Методы управления
На микроконтроллере частотного преобразователя выполняется программное обеспечение, которое управляет основными параметрами электродвигателя (скоростью и моментом). Основные методы управления бесщеточными двигателями, используемые в частотных преобразователях представлены в таблице ниже.
| 1:101 | 5-10 | Не доступно | Низкий | Очень низкая | Низкопроизводительные: насосы, вентиляторы, компрессоры, ОВК (отопление, вентиляция и кондиционирование) |
| >1:2002 | <1-2 | Высокий | Высокая | Высокопроизводительные: краны, лифты, транспорт и т.д. | |
| >1:2002 | <1-2 | Высокий | Высокая | ||
| >1:2002 | <1 | Высокий | Высокая | ||
| >1:2002 | <1-2 | Высокий | Высокая | Высокопроизводительные: электрическая тяга, быстрое ослабление поля |
Управление с помощью пульта ДУ
В отличие от панели управления пульт может иметь кабель длиной до 500 м, по которому передаются сигналы последовательного интерфейса.
Пульт управления имеет клавиши RUN (Пуск), STOP/RESET (Стоп/Сброс), JOG (работа в импульсном или толчковом режиме). Также можно сбрасывать ошибки, менять значение частоты и направление вращения двигателя, изменять прочие параметры.
Управление через аналоговый вход
В преобразователе частоты PR6000 имеется два аналоговых входа – AI1 и AI2. Это выгодно отличает его от других моделей с одним аналоговым входом.
Вход AI1 может использоваться для управления по напряжению с входным сопротивлением 47 кОм. Вход AI2 имеет выбор, который производится переключателем: токовый вход с входным сопротивлением 500 Ом, или вход по напряжению.
Управление через дискретные входы
У преобразователя PR6000 имеется 8 дискретных (цифровых) входов: FWD (вперед/стоп), REW (назад/стоп) и 6 входов DI1…DI6.
Входы FWD и REW могут работать в двух- и трехпроводном режиме, при этом третий провод программируется на одном из входов DI1…DI6. Выбор режима управления скоростью устанавливается в параметре Р077.
Дискретные входы DI1…DI6 являются многофункциональными, они программируются на разные функции, которые запускаются при активации соответствующего входа.
Набор возможных функций: выбор многоскоростного режима, выбор разгона/замедления, включение вращения в режиме JOG вперед/назад, управление остановом, увеличение/уменьшение частоты, вход сигнализации неисправности (аварии), пауза при пуске, трехпроводное управление пуском/стопом, торможение постоянным током, сброс ошибки/сообщения, работа по качающейся частоте, включение/сброс/вход счетчика. Всего можно выбрать до 20 различных параметров, которые устанавливаются в параметрах Р071…Р076 для каждого входа. Активация дискретных входов происходит путем замыкания нужного входа на клемму СОМ. Причем, это может производиться разными способами — выходом контроллера, контактами реле, датчика или ручной кнопки. Дискретные и аналоговые входы показаны ниже.
Управление через последовательный интерфейс
При работе через интерфейс RS-485 преобразователь частоты управляется контроллером либо персональным компьютером через специальный адаптер-преобразователь RS-485/RS-232.
Через этот интерфейс преобразователь может не только принимать команды на изменения параметров и состояния, но и выдавать информацию о своем текущем состоянии на другие устройства. Также по интерфейсу RS-485 может поддерживаться связь с другими преобразователями.
Далее поговорим о способах оперативного управления режимами ПЧ.
Технические особенности применения частотного электропривода
- Для обеспечения высокой производительности можно свободно переключаться на любой режим в настройках.
- Практически все устройства обладают диагностическими функциями, что позволяет быстро устранить возникшую неполадку. Однако рекомендуется в первую очередь проверить настройки, исключить вероятность непроизвольных действий работников.
- Регулируемыйприводможетсинхронизировать конвейерные процессы, либо задавать определённое соотношение взаимозависимых величин. Сокращение оборудования ведёт к оптимизации технологии.
- В состоянии автонастройки параметры двигателя автоматически заносятся в память преобразователя частоты. Благодаря чему повышается точность вычисления момента, и улучшается компенсация скольжения.