Реализация технологического процесса предполагает использование различного оборудования. В некоторых случаях надо добиться синхронного и синфазного вращения осей различных устройств. Иногда по каким-то причинам механическое соединение не представляется возможным. Тогда вместо муфты используют сельсин — специальный датчик, благодаря которому можно добиться требуемой синхронизации. Он нередко входит в состав специальных систем, нуждающихся в повороте на некоторый угол на расстоянии. Сельсин работает в режиме приемника и передающего элемента. Стоит детально разобраться, что это такое, как работает и где может использоваться.
Виды синхронной связи
Прежде чем начать разбираться, что такое и как функционируют сельсины, стоит познакомиться с существующими разновидностями синхронной связи. По данному параметру системы принято делить на системы асинхронного вращения и поворота. Каждая разновидность имеет свои особенности.
Синхронное вращение
В состав входит два одинаковых асинхронных электродвигателя, оснащенных фазными роторами. Обмотки ротора соединяют. Статор подключают к 380 В.
Синхронный поворот
В состав входят сельсины, исполнение которых допускает самосинхронизацию. В зависимости от числа фаз они подразделяются на:
- Трехфазные, чья конструкция полностью соответствует асинхронным двигателям. Область использования таких устройств ограничена из-за наличия разницы между моментами синхронизации при повороте ротора;
- Однофазные, близкие по конструктивному исполнению к машинам синхронного типа с минимальной мощностью. Обмотка возбуждения подобного оборудования работает только при пропускании переменного тока.
Посмотрите видео в конце, чтобы разобраться в особенностях подобной системы.
Принцип действия различных схем
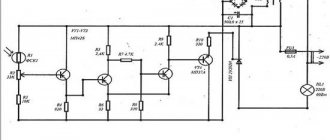
Принцип действия системы наглядно виден на схемах, представленных на рисунке. На схеме «а» датчик и приемник подключены через статорные однокатушечные обмотки к единой сети переменного тока, а обмотки ротора с тремя катушками соединяются друг с другом. Получается система «датчик-приемник». При повороте ротора сельсин-датчика на какую-либо величину угла, ротор приемника повернется на точно такой же угол.
Основой синхронной связи является электромагнитная индукция. Под действием переменного тока обмотки статора, в роторной обмотке индуктируются токи, на величину которых оказывает влияние расположение обмоток статора и ротора относительно друг друга.
Когда роторы в обоих сельсин-устройствах располагаются одинаково относительно статоров, токи в проводах, соединяющий роторы будут при общем равенстве противоположны между собой. Поэтому в каждой катушке ток будет равен нулю. Следовательно валы сельсинов находятся в состоянии покоя и их вращающий момент также равен нулю.
При повороте ротора сельсин-датчика на какой-то угол, данное равновесие токов нарушается и на валу приемника появится вращающий момент. Его ротор будет вращаться до полного исчезновения неравновесия токов. Это неравновесие исчезнет, когда ротор сельсин-приемника примет такое же положение, что и ротор датчика.
В автоматическом регулировочном режиме довольно часто требуется работа приемника в режиме трансформатора. На схеме «б» видно, что ротор приемника закреплен неподвижно, а обмотка статора отключена от сети. Далее в ней будет индуктироваться ЭДС под влиянием тока, протекающего по обмоткам ротора. Величина этого тока будет зависеть от положения ротора датчика. То есть величина ЭДС ротора приемника будет находиться в пропорции с углом поворота сельсин-датчика. В исходном положении оба ротора смещаются на 90 градусов между собой, поэтому ЭДС на роторе датчика будет равна нулю. Таким образом, поворот ротора датчика вызовет индукцию ЭДС на роторе приемника, пропорциональной углу рассогласования обоих роторов.
Системы синхронного поворота: основные режимы
Сельсины работают в двух режимах. Каждый из них имеет свои особенности которые надо обязательно учитывать при выборе оборудования.
Индикаторный
Если оборудование работает в данном режиме, значит, ротор принимающего устройства подсоединен к ведомой оси. Схема актуальна при выборе для ведомой оси минимального момента торможения и размещение на ней индикаторной стрелки. Обмотки возбуждения подключают к общей цепи. Синхронизирующие объединяют с линией связи.
Формируемые магнитные потоки инициируют возникновение ЭДС на обмотках всех фаз. Незначительная рассогласованность приводит к протеканию электротока. Благодаря потоку в датчиках и принимающем элементе сельсина образуются разнонаправленные моменты. С их помощью удается полностью нивелировать угол рассогласования.
Ротор, располагающийся на датчике, затормаживают. Как итог, момент синхронизации влияет на механизм, поворачивающий ведущую ось. Благодаря подобному конструктивному исполнению удается обеспечить одновременный поворот на одинаковый угол роторов обоих подключенных элементов.
Трансформаторный
Электросигнал, появляющийся при рассогласованности роторов, сначала поступает на усиливающую часть схемы. Далее — на ротор исполнительного механизма. Последний начинает поворачивать ротор принимающего элемента и ведомую ось до полного нивелирования имеющейся разницы. Подобный режим актуален при прикладывании к ведомой оси момента торможения, имеющий достаточно большую величину. То есть помогает повернуть механизм.
Обмотку датчика соединяют с ведущей осью и подключают к электросети на 220 В. Для подачи напряжения на элемент, отмечающий за управление двигателем, задействуют усилитель. Обмотку приемника используют для присоединения сельсина. Для объединения обмоток синхронизации двух сельсинов используется линия связи. В возбуждающей обмотке индуцируется ток, создающий в синхронизирующей обмотке ЭДС.
Ток протекает по обоим элементам, так как их обмотки соединены. В принимающем элементе формируются магнитные импульсы. Если элементы рассогласованы, под действием потока в обмотке возникает ЭДС. На входе появляется напряжение, запускающее специальный усиливающий элемент. От него напряжение поступает на статор, принадлежащий исполнительному устройству. Это приводит к тому, что ведомая ось начинает поворачиваться следом за ротором приемника. По мере устранения имеющейся разницы, напряжение становится равным нулю, и вращение ведомой оси прекращается.
Особенности используемой технологии и конструкция влияют на величину погрешности. К таковым относят:
- Разность между параметрами датчика и принимающего устройства;
- Неравномерные показатели магнитной проводимости;
- Отсутствие симметричности у обмоток.
При передаче угла неизбежно возникают погрешности. Их появление обусловлено определенными условиями эксплуатации. При изменении величины сопротивления в сети управления, порядок работы сельсинов изменится.
Общие сведения, классификация
Машины синхронной связи предназначены для осуществления синхронного или синфазного поворотов двух осей, механически между собой не связанных, или для их вращения. Индукционные системы синхронной связи делятся на трехфазные и однофазные. Трехфазные системы применяются для синхронизации двух валов приводных двигателей, не связанных механически. Обычно это силовые системы относительно большой мощности, носящие название систем электрического вала. Их используют, например, в механизмах разводки мостов, ворот шлюзов, в установках бумажной промышленности и т. д. Однофазные системы применяются в маломощных установках и широко используются в схемах автоматических устройств. Микромашины, применяемые в индукционных системах синхронной связи в качестве датчиков и приемников, получили название сельсинов, подчеркивающее их способность к самосинхронизации (self synchron означает самосинхронизирующийся). В теории синхронной связи автоматических устройств различают два понятия: синхронную индикаторную передачу — индикаторный режим сельсинов и следящий привод — трансформаторный режим сельсинов. В первом случае требуется передать лишь незначительный момент, необходимый, например, для поворота стрелки прибора (индикатора) для указания на расстоянии положения какого-либо регулирующего органа — клапана, задвижки, заслонки, вентиля и т. д. Передача показаний на пульт управления особенно важна в случаях, когда по каким- либо причинам человек не может подойти к регулируемому органу. Схема синхронной индикаторной передачи дана на рисунке 347. Здесь сельсин-датчик Д (заводящее устройство) и сельсин-приемник П (отрабатывающее устройство) при угле заводки а отрабатывают пропорциональный угол са непосредственно, то есть стрелка индикатора находится на оси приемника П. При необходимости передать угол поворота механизму, к валу которого приложен более или менее значительный момент сопротивления, использовать индикаторную схему можно лишь при мощных силовых сельсинах. Мощной должна быть и линия связи. Рациональнее и проще поступить иначе: от датчика к приемнику передать слабый по мощности сигнал, который затем, будучи усилен, воздействует на исполнительный двигатель, связанный с приводным механизмом. В такой системе следящего привода схема связи построена так, чтобы напряжение приемника П (сигнал) было функцией угла поворота ротора датчика Д. Кроме того, между приемником и исполнительным двигателем должна быть обратная связь, приводящая роторы датчика и приемника в согласованное положение (положение нулевого сигнала) по окончании отработки. Схема следящего привода дана на рисунке 348. На заводящем устройстве Д, возбуждаемом напряжением сети, осуществляется механический поворот на угол а (угол заводки). Сигнал, выработанный в отрабатывающем устройстве Я, после предварительного усиления в усилительном устройстве УУ в виде напряжения управления подается на исполнительный двигатель ИД, возбуждаемый напряжением сети. Исполнительный двигатель, будучи соединен механически с валом нагрузки, приводит его во вращение.
Рис. 347. Схема синхронной индикаторной передачи. Рис. 348. Схема следящего привода.
Благодаря механической обратной связи исполнительного двигателя с отрабатывающим устройством П будет постепенно уменьшаться напряжение управления, и, когда отрабатывающее устройство П повернется на угол заводки a, Uy станет равным нулю и исполнительный двигатель остановится. В результате произойдет поворот вала нагрузки на угол а или пропорциональный ему са. Индукционным системам синхронной связи присущ ряд положительных свойств: отсутствие искровой коммутации, то есть разрывов цепи питания датчиков при работе системы; высокая точность, обеспечивающая малые углы ошибки между положениями роторов датчика и приемника в согласованном режиме (не выше 2,5° для машин низшего класса); плавность отработки приемником поворота датчика; возможность иметь датчик и приемник бесконтактными; однотипность датчика и приемника.
Конструкция
Исполнение сельсинов диктует их принцип действия. Принято выделять:
- контактные, у которых для соединения обмотки ротора и внешней цепи используются щетки и контактные кольца;
- бесконтактные, в составе которых нет контактных элементов.
Каждая разновидность имеет свои отличительные особенности, с которым стоит обязательно ознакомиться, чтобы понять принцип работы.
Контактные
Контактные по своему исполнению аналогичны асинхронным электродвигателям с фазным ротором и малой мощностью. В их состав входят неявнополюсные ротор и статор. Благодаря этому обе обмотки – распределенные. У ротора предусмотрена обмотка возбуждения. Для подвода электротока используются два кольца.
У отдельных моделей уже имеется статор и ротор. Это их явное преимущество. В результате величина момента синхронизации возрастает. Однако контактные элементы в этом случае — явный недостаток.
Бесконтактные
Для их включения не нужны никакие контактные элементы. Обе обмотки изначально устанавливаются на статоре. Ротор имеет характерную цилиндрическую форму. Для его изготовления используется материал, имеющие ферримагнитные свойства. Алюминиевая прослойка делит роток на два полюса.
Торообразные сердечники располагаются на торцах сельсинов. Их внутренняя часть располагается над ротором. Наружная соединяется со стержнями внешнего магнитопровода. Для изготовления сердечников используется электротехническая листовая стали. Однофазная обмотка устройства состоит из двух дисковых катушек, располагающихся по обеим сторона статора между сердечниками и обмоткой синхронизации.
В процессе работы устройства происходит замыкание магнитного потока импульсного типа. Трехфазная синхронизирующая обмотка соединяется на статоре. Положение оси потока магнитной индукции по мере изменения пространственного положения ротора изменяется. Он занимает иное положение относительно синхронизирующих обмоток. Величина возникающей ЭДС напрямую зависит от величины угла, на который смог повернуться ротор.
К недостаткам подобных устройств является не такое эффективное использование активных материалов. Кроме того, они в среднем на 50% тяжелее контактных аналогов, что обусловлено большими воздушными зазорами. Благодаря последним, величина токов намагничивания возрастает.
Сельсин-приемник
Сельсин-приемник отличается от сельсина-датчика наличием демпфера.
| Указатель глубины. |
Сельсин-приемник устанавливается в контрольной панели и посредством зубчатых передач приводит во вращение указатель глубины и тахогенератор указателя скорости. На одну обмотку тахогенератора подается переменный ток напряжением 10 В, с другой обмотки снимается генерируемое напряжение, величина которого пропорциональна частоте вращения мерного ролика. Генерируемое напряжение подается на вольтметр, шкала которого отградуирована для отсчет.
Сельсин-приемник в этой схеме работает в режиме трансформатора; ротор его остается неподвижным. Рассогласование, которое возникает при повороте ротора сельсин-датчика, вызывает в обмотке возбуждения сельсин-приемника напряжение — сигнал рассогласования.
Сельсин-приемник — воспроизводит закон движения, заданный сельсином-датчиком, в виде углового перемещения ротора, пропорционального угловому перемещению ротора сельсина-датчика.
| Схема дистанционной индукционной передачи на сельсинах. |
Сельсин-приемник имеет такую же схему, как и сельсин-датчик. Его статор питается от той же сети переменного тока, а фазные обмотки ротора соединены через трехпроводную линию связи с фазными обмотками ротора сельсина-датчика.
Сельсин-приемник 4 соединен с сельсином-датчиком по индикаторной схеме.
Сельсин-приемник отличается от сельсина-датчика наличием демпфера.
Сельсин-приемник со свободно поворачивающимся под действием слабого момента ротором, используемый только для приведения в движение указателя или механизма индикации.
Сельсин-приемник поворачивается на заданный первичным преобразователем угол не самостоятельно, а с помощью вспомогательного двигателя, на обмотку управления которого через усилитель подается выходное напряжение сельсина-приемника. Здесь согласованным положением называется положение, при котором напряжение на выходе сельсина-приемника минимально или равно нулю.
| Копировальное устройство. |
Сельсин-приемник приводится во вращение от редуктора перемещения портала. Как только сельсин-датчик повернется на какой-либо угол, на его выходе появляется напряжение. Это напряжение усиливается с помощью усилительного блока и электромашинного усилителя и подается на якорь электродвигателя привода перемещения портала. Вместе с электродвигателем через редуктор вращается сельсин-приемник.
| Кривые синхронизирующего момента однофазных сельсинов. |
Сельсин-приемник с распределенной в пазах ротора первичной и короткозамкнутой успокоительной обмотками имеет кривую момента М / ( б), приближающуюся к синусоиде. Это позволяет использовать такие сельсины в системах, работающих в индикаторном режиме. Назначением короткозамкнутой успокоительной обмотки на роторе, перпендикулярной первичной обмотке, является уменьшение индуктивного сопротивления обмотки статора по поперечной оси по сравнению с продольной, так как воздушный зазор в этом типе сельсина равномерный. Следовательно, применение короткозамкнутой обмотки на роторе эквивалентно устройству явнополюсного ротора.
Функция датчика положения
Если взять и каким-либо способом (вручную, например) провернуть ротор одного из приборов на некоторый угол – равновесие токов в его катушке нарушается. Из-за электрической связи в катушках второго устройства наблюдается аналогичное рассогласование баланса токов. Вследствие этого появляется результирующая, отличная от нуля, что приводить к образованию э/м поля и момента индукции (вращающей силы). Под ее воздействием подвижный узел исполнительной части будет проворачиваться до состояния, в котором равновесие токов полностью восстановится. Нетрудно понять, что это состояние будет соответствовать положению другого прибора.
Типы сельсиновых датчиков
Любой действующий сельсин включает в свой состав такие обязательные элементы, как статор и ротор, выполненные в виде обмоток с электромагнитной связью. Известны следующие разновидности электротехнических устройств, отличающиеся количеством катушек, расположенных в статоре и роторе. Они могут быть представлены следующими сочетаниями:
В последнем случае количество обмоток в обеих частях полностью совпадает.
По своему практическому применению (использованию в электронных схемах авторегулировки) эти приборы делятся на следующие виды:
- устройства-датчики;
- сельсины-приемники;
- приборы дифференциального типа.
Для понимания работы классического сельсинового прибора потребуется рассмотреть его схематическое представление (фото справа).
Что такое сельсин-датчик и зачем он необходим
Реализация технологического процесса предполагает использование различного оборудования. В некоторых случаях надо добиться синхронного и синфазного вращения осей различных устройств. Иногда по каким-то причинам механическое соединение не представляется возможным. Тогда вместо муфты используют сельсин — специальный датчик, благодаря которому можно добиться требуемой синхронизации. Он нередко входит в состав специальных систем, нуждающихся в повороте на некоторый угол на расстоянии. Сельсин работает в режиме приемника и передающего элемента. Стоит детально разобраться, что это такое, как работает и где может использоваться.