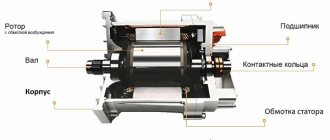
Асинхронный двигатель представляет собой довольно сложную систему, которая характеризуется многими параметрами, среди которых – универсальность. Агрегаты приводят в действие разные компоненты оборудования и могут запускаться разнообразными методами. Самые популярные из них мы сегодня и рассмотрим.
Конденсатор на асинхронный двигатель
Электрический двигатель, как и любая сложная электротехническая система, регулируется определенными требованиями и стандартами, с помощью которых достигается безопасность и результативность работы. Касаются такие параметры множества аспектов мотора, в том числе и его пуска. Первое, что должно быть соблюдено – отсутствие дополнительного инструментария, старт должен осуществляться посредством имеющихся средств. Второе – сведение к минимуму токов пуска и самого пускового момента. Далее в статье мы опишем вкратце основные методы, реализация которых полностью соответствует вышеописанным требованиям.
Старт напрямую
В основе данного распространенного метода – подсоединение статорных обмоток к электрической сети питания без элементов – «посредников». Чаще всего такой пуск имеет место в моторах с роторами короткозамкнутого типа. Такие силовые агрегаты обладают малой мощностью, при прямом подключении к сети питания их обмоток статора не возникает перегрева из-за пусковых токов. Благодаря этому техника не выходит из строя.
Уровень соотношения индуктивности катушек в асинхронных электродвигателях к уровню сопротивления – довольно маленькое. Данное число становится еще меньше, когда устройство обладает меньшей номинальной мощностью. Это обусловливает быстрое затухание свободного тока, который генерируется в процессе запуска. Такая особенность позволяет пренебрегать таким током, не включая его в расчет. Учитывать стоит только ту силу, которая установился в процессе реализации переходного процесса.
Прямой пуск асинхронного двигателя
Как можно видеть на изображении магнитного пускателя – компонент осуществляет автоматический разгон с применением естественной механической характеристики (М на схеме). Реализуется это от точки П (непосредственного начала запуска) и до того момента, при котором М выйдет на уровень, равный показателю сопротивления (Мс). Сам же магнитный пускатель конструктивно представляет собой выключатель электромагнитного типа, устанавливаемый на силовые агрегаты с роторами короткозамкнутого действия.
На второй части картинки вы можете видеть график зависимостей пускового тока от первого момента. Зная это, можно утверждать, что ускорение для разгона равен разнице абсцисс двух графиков: М и Мс. Исходя из этого, если М пусковой будет меньшим Мс, тогда достаточного разгона не получится. Для того, чтобы его все-таки реализовать, нужно иметь оптимальное значение для Мпуск. В случае с силовым агрегатом с короткозамкнутым ротором лучше всего применять специальные формулы, вот одна из них:
Формула
При этом, стоит учитывать, что коэффициент скольжения s в формуле стабильный и равен единице.
Соотношение М пускового и М номинального представляет собой величину, которая определяется кратностью стартового момента. Для удобства это результирующее число указывается как Кпм. В случае с электромоторами, оборудованными короткозамкнутыми роторами, данный коэффициент достигает числа 1,8, регулируется государственными стандартами.
Например, в ситуациях, когда Кпм равен 1,5, а М номинальный – 5000 Нм, прямой запуск начинается с Мп – 7000 Нм.
Стоит также отметить, что не нужно превышать показатели, заданные ГОСТом, ведь это чревато резким увеличением активных сопротивлений на вращающихся компонентах электродвигателя.
К преимуществам принципиальной схемы прямого запуска мотора относят:
- низкая стоимость реализации;
- простота конструкции;
- минимум нагрева у обмоток в процессе запуска.
Отметим также и недостатки такого движения:
- М пусковой в 3 раза превышает М номинальной;
- стартовый ток достигает и вовсе показателя в 800% от уровня номинального.
Но, несмотря на слабые стороны такой схемы запуска и торможения мотора, она остается одной из самых предпочтительных для реализации в асинхронных электродвигателях. Особенно прямой старт выгодно реализовывать с роторами короткозамкнутого типа, ведь он обеспечивает силовому агрегату высокие энергетические характеристики. Также в такой схеме используется одна кнопка или сразу несколько, отвечающих за «старт» и «стоп».
Пуск с помощью частотного преобразователя
Частотный преобразователь, представляет собой электронное статическое устройство, предназначенное для управления асинхронного или синхронного электродвигателя переменного тока. На выходе преобразователя формируется электрическое напряжение с переменной амплитудой и частотой. Название «частотный преобразователь» обусловлено тем, что регулирование скорости вращения двигателя осуществляется изменением частоты напряжения питания, подаваемого на двигатель от преобразователя. Инвертер преобразует напряжение питающей сети 220В/380В частотой 50Гц в выходное импульсное напряжение, которое формирует в обмотках двигателя синусоидальный ток частотой от 0 до 400 Гц и выше. Частотный преобразователь дает возможность регулировки частоты оборотов двигателя переменного тока, изменяя характеристики электросети. В зависимости от настроек частотного преобразователя, когда подается низкое напряжение, насос может работать на низких оборотах. При небольшой потребности в водозаборе работа насоса на пониженной мощности экономит электроэнергию и увеличивает ресурс двигателя. Но, самое главное, в момент пуска насоса двигатель начинает работать с самой маленькой частотой, постепенно разгоняясь до заданных оборотов, что исключает гидравлический удар. Частотно-регулируемый электропривод, в общих чертах состоит из трехфазного электродвигателя переменного тока и инвертера, который обеспечивает, как минимум, плавный пуск электродвигателя, его остановку, изменение скорости и направления вращения. Возможность подобного регулирования улучшает динамику работы электродвигателя и, тем самым, повышает надежность и долговечность работы технологического оборудования. Более того, инвертер позволяет внедрить автоматизацию практически любого технологического процесса. При этом создается система с обратной связью, где инвертер автоматически изменяет скорость вращения электродвигателя таким образом, чтобы поддерживать на заданном уровне различные параметры системы, например, давление, расход, температура, уровень жидкости и т.п. За счет оптимального управления электродвигателем в зависимости от нагрузки, потребление электроэнергии в насосных, вентиляторных, компрессорных и др. агрегатах снижается на 40-50%, а пусковые токи, составляющие 600-700% от номинального тока и являющиеся бичом для пуско-регулирующей аппаратуры, исчезают совсем. Таким образом, применение регулируемых электроприводов на основе частотных преобразователей позволяет создать новую технологию энергосбережения, в которой не только экономится электрическая энергия, но и увеличивается срок службы электродвигателей и технологического оборудования в целом.
Старт путем понижения напряжения
Данный метод плавно запустить мотор используется с двигателями, которые работают на высоких мощностях. Также способ подходит и для агрегатов со средней мощностью, но при условии, что уровень напряжения рабочей сети питания не дает возможности проводить разгон, используя вышеописанный метод прямого пуска.
Для того, чтобы понизить напряжение в агрегате, можно использовать один из трех способов:
- осуществить переключение статорных обмоток с нормальной схемы типа треугольник на пусковую схему «звезда». Старт необходимо начать именно с последней, а когда устройство достигнет номинальной частоты, стоит переключиться на треугольник. В такой ситуации напряжение, которое обеспечивает питание фаз обмоток статора, снижается приблизительно в 1,73 раза. Это дает возможность сократить показатели фазных токов, а линейные сократить в 3 раза;
- старт при помощи добавочного сопротивления, которое способствует общему сокращению вольтажа на обмотке статора. Когда реализуется пуск, в электрическую цепь подключают резисторные компоненты или реакторы, которые обеспечат активное или реактивное сопротивление;
- запуск при помощи подключения двигателя через трансформатор. При этом используется сразу несколько степеней, переключающихся в автоматическом режиме.
Второй (реакторный) и третий (трансформаторный) способ отображены на рисунке:
Понижение напряжения
Основная выгода от реализации такого метода – предоставление возможности для разгона силового агрегата при уровне напряжения, практически равному тому, которое требуется для обеспечения нормального функционирования.
К слабым сторонам автотрансформаторного пуска стоит отнести весомое снижение уровней Мп и максимального момента. Эти показатели напрямую зависят от уровня напряжения питания: чем меньше ток в вольтах, тем меньше будут эти моменты. Исходя из этого, можно говорить о том, что при таких условиях агрегат с нагрузкой просто не произведет самозапуск.
Плавный пуск
Метод плавного пуска электрического двигателя постоянного тока номиналом 12В применяется как альтернатива реостатному. Он используется в ситуациях, когда задача контроля скорости вращения не стоит. В качестве примера можно назвать аварийные турбинные насосы.
Принцип функционирования следующий: после запуска электродвигателя постоянного тока срабатывает устройство, удерживающее ток на якоре в рамках определенного значения, которое выше тока на валу мотора, и этот регулятор напряжения работает до тех пор, пока обороты двигателя не достигнут номинальных величин.
После этого ЭПТ начинает работать в обычном режиме, соответствующем величине напряжения источника питания, который не обязательно должен быть маломощной сетью постоянного тока – допускается использование аккумуляторов. Его подключение к двигателю осуществляется посредством специальных контакторов.
Отметим, что при методе плавного пуска мотора постоянного тока используются разные схемы пуска – от однофазных до трехфазных. Последняя сложнее в реализации, но считается самой надежной и универсальной.
Независимо от вида пуска (прямого, плавного, реостатного) двигателя постоянного тока, используются несколько типов возбуждения:
- последовательное;
- параллельное;
- независимое.
Рассмотрим особенности пуска электродвигателя перечисленных типов возбуждения.
Применение реостата
Этот способ подразумевает реализацию подключения ротора при помощи реостата в момент его включения. Метод реализуется для запуска моторов, ротор которых фазного типа. В ситуациях, когда конструкция роторной цепи уже включает реостат, показатель активного сопротивления растет. При этом, точка К приближается к точке О и маркируется уже К’. Это не способствует снижению максимального М, но увеличивает М пусковое. Это можно наглядно увидеть на рисунке «а», который расположен ниже.
Соединение ротора с реостатом схемы
Параллельно с этим критическое скольжение увеличивается, а зависимость момента от показателя s
смещается к области более сильных скольжений. Точное количество оборотов двигается по направлению к сфере более слабых частот вращения. На рисунке данные ситуации продемонстрированы на графиках «б» и «в» соответственно.
Как правило, реостат, который применяется чтобы уменьшить время запуска мотора, имеет в своей конструкции от 3 до 6 ступеней. Стартовое сопротивление постепенно снижается, что напрямую обеспечивается большей М пусковой. В самом начале двигатель приводится в действие посредством четвертого параметра (ниже на рисунке Б). Данное число полностью отвечает сопротивлению применяемого реостата и демонстрирует наивысшую мощность пуска.
Реостат
Момент вращения (далее Мвр) постепенно снижается по мере того, как растет количество оборотов движимых элементов. При достижении определенного минимального значения, нужно провести отключение реостата, для того, чтобы Мвр восстановился до максимального (характеристика №3). Но, исходя из того, что количество оборотов все-таки возрастает, момент вращения уменьшается. В таком случае происходит отключение еще одного компонента реостата, после чего работа агрегата производится уже по второму параметру. Когда же происходит полное отключение и реостата и фазного ротора, тогда мы имеем завершение пускового процесса. Силовой агрегат целиком работает по первой характеристике.
Запуск мотора в ход таким способом имеет в основе изменение параметра Мвр — от наивысшего до минимального значений. Уровень сопротивления снижается ступенчато, полностью соответствуя ломаной кривой. Исключение реостатных частей реализуется ручным методом или же автоматически.
К плюсам такого метода относят возможность применения с электрическими двигателями, в основе которых – фазные роторы. Здесь оператор имеет возможность проводить включение агрегата при М пуск, который предельно близок к уровням М макс. при этом, стоит отметить, что стартовые токи имеют минимальные показатели. Изменить их силы можно так, как указано на изображении В.
Несмотря на довольно внушительные преимущества, недостатки также есть. К ним относят:
- сложное присоединение;
- потребность в применении в системе более дорогих моторов, включающих уже знакомый нам фазный ротор;
- рабочие характеристики хуже, чем у моторов с аналогичными параметрами, но с короткозамкнутым ротором.
Преимущественно из-за недостатков, большинство применяется фазные двигатели только при возникающих сложностях с агрегатами других типов.
Реостатный пуск
Этот способ, в отличие от предыдущего, используется для обеспечения пуска электромоторов повышенной мощности.
Для этого в его электрическую схему включают реостат, представляющий собой секционный провод с высоким показателем удельного сопротивления. При реостатном способе пуска ЭПТ сопротивление реостата быстро уменьшается, что позволяет исключить большие перепады по току.
Такой прием позволяет осуществлять разгон вала электромотора с постоянным ускорением, что положительно сказывается на долговечности двигателя. Число секций реостата может варьироваться в широких пределах, обычно это 2-7 сегментов. Их количество зависит от разности максимального и минимального значений пускового тока, а также от требований к плавности пуска.
Задача обеспечения выравнивания значений пускового тока на всех стадиях процесса в рамках заданного временного промежутка решаема, но в целом автоматизации не поддается. Если без этого нельзя, то есть ЭПТ является частью автоматизированного комплекса, используется приём с автоматическими контакторами, которые срабатывают поочередно и шунтируют пусковые сопротивления.
При выходе двигателя на рабочие обороты реостат подлежит отключению от цепи, поскольку его характеристики позволяют работать непродолжительное время, иначе он просто выйдет из строя. Снижение сопротивления, как и его рост в начале, происходит дискретно.
Однофазный двигатель
Вспомогательная обмотка – ключевой элемент при обеспечении запуска асинхронного мотора на 1 фазу. Созданный элемент должен располагаться перпендикулярно по отношению к рабочей намотке статора. Но этого недостаточно для генерирования оборачиваемого магнитного поля. Необходимо, чтобы был реализован сдвиг по токовой фазе, который протекает по дополнительной обмотке. Сдвиг относится к относительному току, который возникает в рабочих катушках при обеспечении старта.
Чтобы обеспечить фазовый сдвиг в момент соединения агрегата к однофазной сети, необходимо включить специальный компонент в электрическую цепь. Как правило, для таких целей используют резистор, дроссель или же конденсатор.
После того, как разгон двигателя достигнет требуемых частотных значений, происходит отключение вспомогательной намотки. Осуществляется это либо вручную, либо в автоматическом режиме. Поначалу мотор функционирует по двухфазным характеристикам, а после достижения уровня частоты – по однофазной.
Пример омического сдвига фаз
Сравнение DOL и пуска «звезда — треугольник»
В следующих диаграммах представлены токи для насоса Grundfos CR, приводимого в действие электродвигателем Grundfos MG мощностью 7,5 кВт посредством прямого пуска (DOL) и пуска «звезда — треугольник», соответственно. Как Вы можете видеть, способ пуска DOL характеризуется высоким пусковым током, который с течением времени выравнивается и становится постоянным. Способ пуска «звезда — треугольник» характеризуется более низким пусковым током, однако, в процессе пуска при переходе от «звезды» к «треугольнику» наблюдаются пики.
При пуске по схеме «звезда» (t = 0,3 с), ток уменьшается. Однако, во время перехода от «звезды» к «треугольнику» (в точке t = 1,7 с), импульс тока достигает того же уровня, что и пусковой ток при прямом пуске. Скачок тока может стать ещё больше, так как в период переключения на двигатель не подаётся питание. Значит, двигатель теряет скорость перед подачей полного напряжения (фазового напряжения).
Стартовое сопротивление
Среди эффективных методов, которые существуют в современной электротехнике стоит выделить использование сопротивления при старте. Актуальна данная технология для моторов, получающих питание от однофазных сетей. Также важно, чтобы двигатель имел первичную вспомогательную намотку с ротором короткозамкнутого типа. Зачастую такой агрегат именуется, с расщепленной фазой, электрическая цепь которого обладает высоким активным сопротивлением.
Для того, чтобы запустить такое устройство, необходимо наличие пускового резистора, которое соединяется последовательным методом с намоткой вспомогательного действия. В таком случае будет иметь место сдвиг фаз, который достигнет угла в 30 градусов. Данного показателя с легкостью хватает для осуществления разгона.
В этой схеме можно использовать дополнительную намотку с высоким уровнем сопротивления и с пониженной индуктивностью. Здесь медный компонент с малым количеством витков, провода при этом с меньшим сечением, что является ключевым отличием от рабочих обмоток.
Другие способы запуска
Также стоит перечислить и другие, довольно популярные схемы:
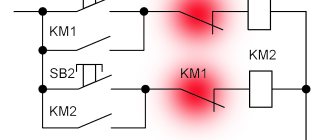
- регулирование реверсивного двигателя с двумя пускателями (или одним реверсивного действия) и с тремя кнопками;
- для реверсивного мотора с применением 2 пускателей и 3 клавиш, среди которых 2 имеют спаренные контакты.
Все варианты управления, так или иначе, похожи друг на друга, но, несмотря на это, каждый из них уникален по-своему. Выбирать точный вариант стоит, ориентируясь на рабочие показатели мотора, который будет приводиться в движение.