Мощность и электрический ток частотного преобразователя напряжение при подсоединении к нему в одно время двух двигателей выбирают с превышением на 20% от всей мощности электромоторов. Для расчета протяженности электрического кабеля надо сложить размеры всех кабелей двух двигателей. Снизить общую длину необходимо, если подключить два электродвигателя конкретно к контактам частотного преобразователя. При двух электродвигателях целесообразно поставить дроссель для мотора, несмотря на то, что общая протяженность этих кабелей не выше самой большой длины.
Множество преобразователей частоты не терпит соединения и отключения электродвигателей тока контакторами с электроприводом в процессе работы, а только включив СТОП команду на приводе.
Для чего нужен преобразователь частоты?
ПЧ – самое совершенное электронное устройство, через которое можно крутить асинхронный двигатель. Вот основные функции преобразователя частоты:
- Пуск/Стоп двигателя,
- Плавный разгон/замедление (торможение),
- Изменение рабочей скорости от 0 до 100% и выше номинала,
- Защита двигателя (их несколько – по току, температуре и др.),
- Реверс,
- Несколько вариантов управления (дискретное, аналоговое, по программе – от кнопок, реле, потенциометров, датчиков, контроллера, и т.д.).
Преобразователь частоты имеет несколько названий, которые используются на равных условиях:
- преобразователь частоты (ПЧ) – официальное название, его использует большинство производителей в своей документации,
- частотный преобразователь (ЧП),
- частотник – можно считать жаргоном, но в разговоре употребляется наиболее часто,
- инвертор,
- Inverter, Frequency Converter (FC), Variable Frequency Drive (VFD) – на английском.
Все эти названия могут использоваться в других сферах, поэтому иногда нужно уточнять. Что касается темы статьи, наша сфера – подключение преобразователя частоты для трехфазных асинхронных двигателей.
Конечно, асинхронный двигатель можно не только через ПЧ, для этого есть несколько различных устройств. По подключению двигателей у меня много статей, вот основные:
- Схемы подключения трехфазного электродвигателя
- Схемы подключения магнитного пускателя
- Подключение двухскоростного асинхронного двигателя
- Схемы подключения двигателя “Звездой” и “Треугольником”
- Реле для управления двигателем по схеме “Звезда-Треугольник”
- Мягкий пускатель (софтстартер) – устройство и применение
- Устройство плавного пуска (УПП) электродвигателя. Пример применения
- Описание работы схем на реле и контакторах
Разновидности частотных преобразователей
Современные частотные преобразователи различаются многообразием схем, которые можно сгруппировать в несколько категорий:
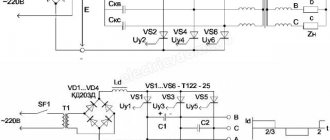
- Высоковольтные двухтрансформаторные
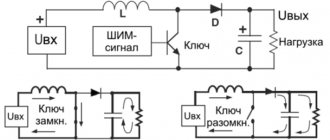
Принцип работы такого прибора заключается в последовательном преобразовании напряжения при помощи понижающего и повышающего трансформатора, преобразования частоты низковольтным преобразователем, а также сглаживание пиковых перенапряжений на выходе с помощью синусоидального фильтра. Схема работы выглядит следующим образом: питающее напряжение 6000 В подается на понижающий трансформатор и на его выходе получают 400 (660) В, далее оно подается на низковольтный преобразователь и после изменения частоты подается на повышающий трансформатор для увеличения значения напряжения до начального.
- Тиристорные преобразователи
Такие устройства состоят из многоуровневых частотных преобразователей на основе тиристоров. Конструктивно они состоят из трансформатора (обеспечивающего понижение питающего напряжения), диодов (для выпрямления) и конденсаторов (для сглаживания). Также для уменьшения уровня высших гармоник применяют многопульсные схемы.
Тиристорные преобразователи имеют высокий КПД до 98 % и большой диапазон выходных частот 0-300 Гц, что для современного оборудования является положительной и востребованной характеристикой.
- Транзисторные частотные преобразователи
Такие частотные преобразователи являются высокотехнологичными устройствами, которые собираются на транзисторах различного типа. Конструктивно они имеют транзисторные инверторные ячейки и многообмоточный сухой трансформатор специальной конструкции. Управляют таким преобразователем с помощью микропроцессора, что позволяет тонко настраивать работу оборудования и контролировать весь процесс работы различных двигателей. Транзисторные частотные преобразователи, так же, как и тиристорные, имеют высокий КПД и широкий диапазон регулирования частоты.
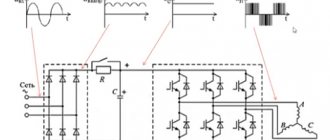
Схема включения и работа преобразователя частоты
Схема включения ПЧ, если очень просто, выглядит так:
Простейшая схема включения преобразователя частоты
Для чего тут эта элементарная схема? – спросите вы. Тем не менее, есть инженеры-электронщики, которые нарисовать её не смогут.
Она может быть ещё проще, если убрать внешнее управление. Ведь управлять ПЧ можно непосредственно с передней панели.
Работа преобразователя частоты, если говорить о приведенной выше схеме, описывается просто: Три фазы на входе, три фазы на выходе. На входе три фазы имеют, как правило, линейное напряжение 380 В с частотой 50 Гц. В зависимости от типа подключенного двигателя, линейное напряжение на выходе изменяется от 0 до 380 В, при этом выходная частота зависит от напряжения, и может меняться от 0 до 100 Гц и более (там уже не выдерживает механика). Как зависит частота от напряжения, описывает вольт-частотная характеристика, которая в простейшем случае будет линейной:
Как работает преобразователь частоты. Типовая линейная зависимость напряжения от частоты
Этот график – ключевой для понимания принципа работы преобразователя частоты и его настройки. Обратите внимание – на вольт-частотной характеристике приведены названия основных точек и номера параметров.
Конечно, в таких делах очень много нюансов, но не буду вдаваться в подробности. Если нужно много теории и принципов работы ПЧ – в конце статьи будет что скачать и почитать. В том числе мою обзорную статью в журнале.
На этом введение можно закончить. Дальше будет пример подключения ПЧ, там я на практике покажу, какие параметры я настраиваю и почему.
Вариант 1
Всем здравствуйте. Вот решил написать статейку про асинхронный привод и преобразователь частоты, который я изготавливал. Моему товарищу надо было крутить пилораму, и крутить хорошо. А сам я занимался импульсной электроникой и сразу предложил ему частотник. Да, можно было купить фирмовый преобразователь, и мне приходилось с ними сталкиваться, параметрировать, но захотелось своего, САМОДЕЛАШНОГО! Да и привод циркулярки к качеству регулирования скорости не критичен, только вот к ударным нагрузкам и к работе в перегрузе должен быть готов. Также максимально-простое управление с помощью пары кнопок и никаких там параметров.
Основные достоинства частотнорегулируемого привода (может для кого-то повторюсь):
Формируем из одной фазы 220 В полноценные 3 фазы 220 В со сдвигом 120 град., и имеем полный вращающий момент и мощность на валу.
Увеличенный пусковой момент и плавный пуск без большого пускового тока
Отсутствует замагничивание и лишний нагрев двигателя, как при использовании конденсаторов.
Возможность легко регулировать скорость и направление, если необходимо.
Вот какая схемка собралась:
3-фазный мост на IGBT транзисторах c обратными диодами (использовал имеющиеся G4PH50UD) управляется через оптодрайвера HCPL 3120 (бутстрепная схема запитки) микроконтроллером PIC16F628A. На входе гасящий конденсатор для плавного заряда электролитов DC звена. Затем его шунтирует реле и на микроконтроллер одновременно приходит логический уровень готовности. Также имеется триггер токовой защиты от к.з. и сильной перегрузки двигателя. Управление осуществляют 2 кнопки и тумблер изменения направления вращения.
Силовая часть мною была собрана навесным монтажом. Плата контроллера отутюжина вот в таком виде:
Параллельные резисторы по 270 к на проходных затворных конденсаторах (забыл под них места нарисовать) припаял сзади платы, потом хотел заменить на смд но так и оставил.
Есть внешний вид этой платы, когда уже спаивал:
Вид с другой стороны
Для питания управления был собран типовой импульсный обратноходовой (FLAYBACK) блок питания.
Его схема:
Можно использовать любой блок питания на 24В, но стабилизированный и с запаздыванием пропадания выходного напряжения от момента пропажи сетевого на пару тройку секунд. Это необходимо чтобы привод успел отключиться по ошибке DC. Добивался установкой электролита С1 большей ёмкости.
Теперь о самом главном…о программе микроконтроллера. Программирование простых моргалок для меня сложности не представляло, но тут надо было поднатужить мозги. Порыскав в интернете, я не нашёл на то время подходящей информации. Мне предлагали поставить и специализированные контроллеры, например контроллер фирмы MOTOROLA MC3PHAC. Но хотелось, повторюсь, своего. Принялся детально разбираться с ШИМ модуляцией, как и когда нужно открыть какой транзистор… Открылись некие закономерности и вышел шаблон самой простой программы отработки задержек, с помощью которой можно выдать удовлетворительно синусовую ШИМ и регулировать напряжение. Считать ничего контроллер конечно не успевал, прерывания не давали что надо и поэтому я идею крутого обсчёта ШИМ на PIC16F628A сразу отбросил. В итоге получилась матрица констант, которую отрабатывал контроллер. Они задавали и частоту и напряжение. Возился честно скажу, долго. Пилорама уже во всю пилила конденсаторами, когда вышла первая версия прошивки. Проверял всю схему сначала на 180 ватном движке вентиляторе. Вот как выглядела «экспериментальная установка»:
Первые эксперименты показали, что у этого проекта точно есть будущее.
Программа дорабатывалась и в итоге после раскрутки 4 кВт-ного движка её можно было собирать и идти на лесопилку.
Товарищ был приятно удивлён, хоть и с самого начала относился скептически. Я тоже был удивлён, т.к. проверилась защита от к.з. (случайно произошло в борно двигателя). Всё осталось живо. Двигатель на 1,5 кВт 1440 об/мин легко грыз брусы диском на 300 мм. Шкивы один к одному. При ударах и сучках свет слегка пригасал, но двигатель не останавливался. Ещё пришлось сильно подтягивать ремень, т.к. скользил при сильной нагрузке. Потом поставили двойную передачу.
Сейчас ещё дорабатываю программу она станет еще лучше, алгоритм работы шим чуть сложнее, режимов больше, возможность раскручиваться выше номинала…а тут снизу та самая простая версия которая работает на пиле уже около года.
Её характеристики:
- Выходная Частота: 2,5-50 Гц, шаг 1,25 Гц; Частота ШИМ синхронная, изменяющаяся. Диапазон примерно 1700-3300 Гц.; Скалярный режим управления U/F, мощность двигателя до 4 кВт.
- Минимальная рабочая частота после однократного нажатия на кнопку ПУСК(RUN) — 10Гц.
- При удержании кнопки RUN происходит разгон, при отпускании частота остаётся та, до которой успел разогнаться. Максимальная 50 Гц- сигнализируется светодиодом. Время разгона около 2 с.
- Светодиод «готовность» сигнализирует о готовности к запуску привода.
- Реверс опрашивается в состоянии готовности.
- Режимов торможения и регулирования частоты вниз нет, но они в данном случае и не нужны.
- При нажатии Стоп или СБРОС происходит остановка выбегом.
Программа и печатка в конце материала.
Вариант 2
В данной статье речь пойдет о частотном преобразователе, в простонародье, частотнике. Данный частотник, а в дальнейшем частотный привод, способен управлять 3-х фазным асинхронным двигателем. В данном частотном приводе (ЧП) я использую интеллектуальныйсиловой модуль компании International Rectifier, а конкретно IRAMS10UP60B (на AliExpress), единственное, что с ним сделал, это перегнул ножки, так что, по сути, модуль получился IRAMS10UP60B-2. Выбор на данный модуль пал преимущественно из-за встроенного драйвера. Главной особенностью встроенного драйвера является возможность использования 3 ШИМ вместо 6 ШИМ каналов. Кроме того цена на данный модуль на eBay около 270 рублей. В качестве управляющего контроллера использую ATmega48.
Разрабатывая данный привод я делал упор на эффективность конструкции, минимальную себестоимость, наличие необходимых защит, гибкость конструкции. В результате получился частотный привод со следующими характеристиками (функциями):
- Выходная частота 5-200 Гц
- Скорость набора частоты 5-50 Гц в секунду
- Скорость снижения частоты 5-50 Гц в секунду
- 4-х фиксированная скорость (каждая из которых от 5-200 Гц)
- Вольт добавка 0-20%
- Две «заводских» настройки, которые всегда можно активировать
- Функция намагничивания двигателя
- Функция полной остановки двигателя
- Вход для реверса (как без него)
- Возможность менять характеристику U/F
- Возможность задания частоты с помощью переменного резистора
- Контроль температуры IGBT модуля (сигнализация в случае перегрева и остановки привода)
- Контроль напряжения DC звена (повышенное-пониженное напряжение DC звена, сигнализация и остановка привода)
- Пред заряд DC звена
- Максимальная мощность с данным модулем 750 вт, но крутит и 1.1 кв на моем ЧПУ
- Все это на одной плате размером 8 х 13 см .
На данный момент защита от сверх тока или кз не реализованы (считаю нет смысла, хотя, свободную ногу в МК с прерыванием по изменению оставил)
Собственно, схема данного девайса :
Проект в layout
Ниже фото того, что у меня получилось
Печатная плата данного девайса (доступна в lay под утюг)
На данном фото полностью рабочий экземпляр, проверенный и обкатанный (не имеет панельки расположен слева). Второй для теста atmega 48 перед отправкой (расположен справа).
На данном фото тот самый irams (делал с запасом, должен поместится iramx16up60b )
Алгоритм работы устройства
Изначально МК (микроконтроллер) является настроенным на работу с электродвигателем номинальным напряжением 220 В при частоте вращающего поля 50Гц (т.е. обычный асинхронник, на котором написано 220 в 50 Гц). Скорость набора частоты установлена на уровне 15 Гц/сек.(т.е. разгон до 50 гц займет чуть более 3 сек., до 150 Гц-10 сек ). Вольт добавка установлена на уровне 10 %, длительность намагничивания 1 сек. (постоянная величина неизменна ), длительность торможения постоянным током 1 сек. (постоянная величина неизменна). Следует отметить ,что напряжение при намагничивании, как и при торможении, является напряжением вольт добавки и меняется одновременно. К слову, преобразователь частоты является скалярным, т.е. с ростом выходной частоты увеличивается выходное напряжение.
После подачи питания происходит заряд емкости dc звена. Как только напряжение достигает 220В (постоянное ) с определенной задержкой включается реле предзаряда и загорается единственный у меня светодиод L1. С этого момента привод готов к запуску. Для управления частотником имеется 6 входов:
- Вкл (если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5 Гц)
- Вкл+реверс(если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5 Гц, но в другую сторону)
- 1 фиксированная частота (задается R1)
- 2 фиксированная частота (задается R2)
- 3 фиксированная частота (задается R3)
- 4 фиксированная частота (задается R4)
В этом управлении есть одно Но. Если в процессе вращения двигателя менять задание на резисторе, то оно изменится лишь после повторной подачи команды (вкл.) или (вкл+реверс.). Иначе говоря, данные с резисторов читаются пока отсутствуют эти два сигнала. Если планируется регулировать скорость с помощью резистора в процессе работы, то необходимо установить джампер J1.В этом режиме активен лишь первый резистор, причем резистор R4 ограничивает максимальную частоту, то есть если его выставить на 50% (2.5 вольта 4 «штырь». на фото ниже 5 земля), то частота R1 будет регулироваться резистором от 5 до 100 Гц.
Для задании частоты вращение нужно учитывать, что 5v на входе в МК соответствует 200 Гц., 1v-40 Гц, 1.25v-50 Гц и т.д. Для измерения напряжение предусмотрены контакты 1-5, где 1-4 соответствуют номерам резисторов, 5- общий минус(на фото ниже). Резистор R5 служит для подстройки масштабирования напряжения DC звена 1 в -100 в (на схеме R30).
Расположение элементов
Внимание! Плата находится под напряжением опасным для жизни. Входа управления развязаны оптопарами.
Особенности настройки
Настройка привода перед первым включением сводится к проверке монтажа электронных компонентов и настройки делителя напряжения для DC звена (R2).
100 Вольтам DC звена должно соответствовать 1 вольт на 23 (ножке МК)- это ВАЖНО!!!!….На этом настройка завершена…
Перед подачей сетевого напряжения необходимо промыть плату (удалить остатки канифоли) со стороны пайки растворителем или спиртом, желательно покрыть лаком.
Привод имеет «заводские » настройки для двигателя (220 в 50 Гц) :
- Включить привод
- Дождаться готовности (если подано питание только на МК , просто подождать 2-3 секунды)
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод L1 не начнет мигать, отпустить кнопку В1
- Подать команду выбора 1 скорости. Как только светодиод перестанет мигать, убрать команду
- Привод настроен . В зависимости от того …………………….светодиод горел (если не горел, то привод ожидает напряжения на DC звене).
При такой настройке автоматически в записываются следующие параметры:
- Номинальная частота двигателя при 220 В — 50 Гц
- Вольт добавка (напряжение намагничивания, торможения ) — 10%
- Интенсивность разгона 15 Гц./сек
- Интенсивность торможения 15 Гц./сек
Если подать сигнал выбора второй скорости, то в EEPROM запишутся следующие параметры (разница лишь в частоте):
- Номинальная частота двигателя при 220 В- 30 Гц
- Вольт добавка (Напряжение намагничивания, торможения ) 10%
- Интенсивность разгона 15 Гц./сек
- Интенсивность торможения 15 Гц./сек
Наконец, третий вариант Настройки:
- Нажать на кнопку В1 и держать
- Дождаться, когда светодиод начнет мигать
- Отпустить кнопку В1
- Не подавать напряжение на входа выбора 1-ой или 2-ой скорости
- Задать параметры подстроечными резисторами
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод не начнет моргать
Таким образом, до тех пор, пока светодиод мигает, привод находится в режиме настройки. В этом режиме при подаче входа 1-ой или 2-ой скорости в EEPROM записываются параметры. Если не подавать напряжение на входа выбора 1-ой или 2-ой скорости, то фиксированные параметры в EEPROM не запишутся, а будут задаваться подстроечными резисторами.
- Резистор задает номинальную частоту двигателя при 220 В ( Так, например, если на двигателе написано 200 Гц /220 то резистор нужно выкрутить на максимум; если написано 100 Гц/ 220 в нужно добиться 2.5 Вольта на 1-ом контакте. (1 Вольт на первом контакте соответствует 40 Гц); если на двигателе написано 50 Гц/400 В то нужно выставить 27 Гц/0,68 В (например:(50/400)*220=27 Гц )так, как нам необходимо знать частоту двигателя при 220В питания двигателя. Диапазон изменения параметра 25 Гц — 200 Гц.(1 Вольту на контакте 1-ом соответствует 40 Гц)
- Резистор отвечает за вольт добавку. 1 Вольт на 2-ом контакте соответствует 4% напряжения вольт добавки (мое мнение выбрать на уровне 10% то есть 2.5 вольта повышать с осторожностью) Диапазон настройки 0-20% от напряжения сети (1 Вольту на контакте 2-ом соответствует 4%)
- Интенсивность разгона 1 В соответствует 10 Гц/сек (на мой взгляд оптимально 15 -25 Гц/сек) Диапазон настройки 5 Гц/сек — 50 Гц/сек. (1 вольту на контакте 3-ом соответствует 10 Гц/сек)
- Интенсивность торможения 1 В соответствует 10 Гц/сек (на мой взгляд оптимально 10 -15 Гц/сек) Диапазон настройки 5 Гц/сек — 50 Гц/сек. (1 вольту на контакте 4-ом соответствует 10 Гц/сек)
После того, как все резисторы выставлены нажимаем и держим кнопку В1 до тех пор пока светодиод не перестанет мигать!!!! Если светодиод моргал и загорелся, то привод готов к запуску.Если светодиод моргал и НЕ загорелся, то ждем 5 секунд, и только потом отключаем питание от контроллера.
Ниже представлена вольт-частотная характеристика устройства для двигателя 220 в 50 Гц с вольт добавкой в 10 % .
- Uмах- максимальное напряжение, которое способен выдать преобразователь
- Uв.д.- напряжение вольт добавки в процентах от напряжении сети
- Fн.д.- номинальная частота вращения двигателя при 220 В . ВАЖНО
- Fmax- максимальная выходная частота преобразователя.
Еще один пример настройки
Предположим, у вас имеется двигатель, на котором указана номинальная частота 50 Гц , номинальное напряжение 80 В, Чтобы узнать какая будет номинальная частота при 220 В необходимо: 220 В разделить на номинальное напряжение и умножить на номинальную частоту (220/80*50=137 Гц). Таким образом, мы получим,что напряжение на 1 контакте (резисторе) нужно выставить 137/40=3,45 В.
Симуляция в протеусе разгон 0-50 Гц одной фазы (на 3-х фазах зависает комп )
Как видно из скриншота с ростом частоты увеличивается амплитуда синуса. Разгон занимает примерно 3.1 сек.
По поводу питания
Рекомендую использовать трансформатор, так как это самый надежный вариант. На моих тестовых платах нет диодных мостов и стабилизатора для igbt модуля 7812. Для скачивания доступны две печатные платы. Первая та которая представлена в обзоре. Вторая имеет незначительные изменения, добавлен диодный мостик и стабилизатор. Защитный диод ставить обязательно P6KE18A или 1.5KE18A ставить обязательно.
Пример размещения трансформатора, как оказалось найти совсем нетрудно.
Какой двигатель можно подключить к данному преобразователю частоты?
Все зависит от модуля. В принципе можно подключить любой, главное, чтобы его сопротивление для модуля irams10up60 было более 9 Ом. Нужно учесть, что модуль irams10up60 рассчитан на маленький импульсный ток и имеет встроенную защиту на уровне 15 А Этого очень мало. Но для двигателей 50 Гц 220 В 750 Вт, этого за глаза. Если у вас высокооборотистый шпиндель, то скорее всего он имеет маленькое сопротивление обмоток. Данный модуль может пробьет импульсным током. При использовании модуля IRAMX16UP60B (ножки придется загнуть самостоятельно) мощность двигателя по даташиту возрастает с 0.75 до 2.2 кВт.
Главное у данного модуля: ток короткого замыкания 140 А против 47 А, защита настроена на уровне 25 А. Какой модуль использовать решать вам. Нужно помнить что на 1 кВт необходимо 1000 мкФ емкости dc звена.
По поводу защиты от КЗ. Если у привода сразу после выхода не ставить сглаживающий дроссель (ограничивает скорость нарастания тока) и коротнуть выход модуля, то модулю придет «хана». Если у вас модуль iramX, шансы есть. А вот с IRAMS шансов ноль, проверено.
Программа занимает 4096 кБ памяти из 4098. Все сжато и оптимизировано под размер программы по максимум. Время цикла есть фиксированная величина равная 10 мс.
На данный момент всё вышеописанное работает и испытано.
Если использовать кварц на 20 МГц, то привод получится 10-400 Гц; темп разгона 10-100 Гц/сек; частота ШИМа возрастет до 10кГц; время цикла упадет до 5мс.
Забегая вперед следующий частотный преобразователь будет реализован на ATmegа64, иметь разрядность ШИМ не 8, а 10 Бит, иметь дисплей и множество параметров.
Ниже смотрите видео настройки привода, проверки защиты перегрева, демонстрации работы (использую двигатель 380 В 50 Гц, а настройки для 220 В 50 Гц). Так сделал специально, чтобы проверить как работает ШИМ с минимальным заданием.)
Для чего понадобился ПЧ
Ко мне обратился старый знакомый с обувного производства. Ему для предпродажной подготовки женских сапог требуется операция полировки, чтобы сапоги блестели.
Кстати, я уже делал у него пресс горячего тиснения, где установил регулятор температуры ФиФ. Теперь на сапогах можно получать красивые изображения.
Станок для полировки был в отвратительном состоянии, но его удалось привести в чувство, перебрав советские контакторы и подсоединив двигатели.
Тем не менее, для качественной обработки поверхности кожи было предпочтительно, чтобы линейная скорость полировки могла меняться. Кроме как ПЧ, другими способами это сделать невозможно. Замена шкивов не рассматривалась – скорость нужно менять оперативно и без инструментов.
В результате я установил преобразователь частоты Delta. Подключил и настроил его так, что можно менять обороты подключенного через него двигателя нажатием кнопок на панели управления. Дальше – подробности.
Устройство станка, перед установкой ПЧ
Итак, вот, что мы имели исходно:
Станок полировки кожи
В станке два двигателя – вытяжка пыли и привод полировки.
Обувной станок полировки кожи, вид сбоку
Внутреннее устройство электрики станка полировки обуви
Слева на фото – вводной автомат и контакторы. Это вся схема станка.
Старая схема полировки. Контакторы двигателей вытяжки и полировки
Ещё есть три кнопки управления – Пуск вытяжки, Пуск полировки, Стоп:
Старые кнопки управления контакторами. На левой оси – фетр (войлок) для полировки
Вытяжка нас не касается, хотя кнопки для её включения я устанавливать буду. А двигатель полировки подключим через ПЧ.
Электродвигатель, который подключается через преобразователь частоты
Асинхронный двигатель в работе. Шкив и ременная передача
Шильдик асинхронного двигателя, который предстоит подключить через частотник
При подключении ПЧ очень важно знать параметры двигателя. Загвоздка была в том, что на шильдике информация у него не читалась. Ведь настраивается единый привод, а это связка ПЧ+двигатель.
Забегая вперед скажу, что по внешнему виду двигателя я определил, что это движок на 3000 об/мин, а измерением тока и испытаниями я понял, что мощность двигателя – 1 кВт.
Вспомнил, что по двигателям у меня есть ещё статья – что такое пусковой ток двигателя, и как его узнать.
Поочередное подключение электродвигателей
При использовании неспециализированного преобразователя частоты для поочередного управления несколькими приводами необходимо:
- Предусмотреть блокировку переключения при работающем электродвигателе. Все коммутации нужно производить при переводе частотника в режим “Останов”.
- Реализовать защитное отключение ПЧ до отключения контакторов или переключателей при пропадании напряжения в выходной цепи.
Компания Danfoss выпускает несколько серий специальных частотных преобразователей для управления несколькими электродвигателями. Все необходимые для этого функции реализованы в программном обеспечении и аппаратной части ПЧ. Работу каждого привода можно запрограммировать в настройках. ПЧ имеет встроенные тепловые реле и соответствующие входы и выходы.
Применение таких устройств избавляет от необходимости фазировки двигателей, расчетов характеристик частотника, необходимости устанавливать дополнительные коммутирующие и защитные аппараты, а также гарантирует корректную работу приводов во всех предусмотренных режимах.
Установка и подключение преобразователя частоты
Теперь расскажу и покажу пошагово, как я смонтировал частотник.
Для начала приготовил переднюю панель.
Панель управления частотником, кнопки, вольтметр
Панель изготовил из текстолита. На панели будут закреплены кнопки с НО и НЗ контактами (без фиксации), и вольтметр в качестве тахометра.
Панель с обратной стороны – кнопки зафиксированы, осталось поставить контакты и закрепить вольтметр
Если говорить просто, вся переделка заключалась в том, что я выкинул контактор и поставил преобразователь частоты Delta, на 1,5 кВт:
Частотник Delta мощностью 1,5 кВт вместо контактора
Честно говоря, 1,5 кВт – многовато, то есть, ПЧ я выбрал с большим запасом (почти в 2 раза). Меньше мощность найти не удалось. Тем лучше с электрической точки зрения – запас карман не тянет.
Фото установки преобразователя частоты:
Частотник установлен в станок на боковую дверцу, вместо контактора
Знаю, что монтаж выполнен не идеально, хорошо бы использовать наконечники и бандажи на провода, но давайте не будем об этом…
ПЧ Дельта, через него подключен двигатель полировки
Ноль в питании станка и частотника не используется, приходит только 3 фазы и земля (PEN проводник).
Питание ПЧ – 3 фазы и земля на входные клеммы R, S, T
Не берите с меня пример – от РУ защитный проводник должен приходить на РЕ шину, и с каждой отдельной клеммы – отдельно на клемму ПЧ, на корпус, и ещё куда надо.
Подключение ПЧ Delta. Клеммы управления и выходные силовые клеммы на двигатель U, V, W
Два одинаковых мотора на один частотник возможно?
Теоретически такое подключение не рекомендуется, особенно для векторного преобразователя частоты. Можно подключать на скалярный, если электродвигатели работают совместно на одном валу, и можно фазировать их плавно через муфту тока скольжения. Возможно подстраивать расположение роторов между собой муфтой. Затем муфту надо закрепить. На небольшой нагрузке подстроить токи между двигателями с помощью токовых клещей.
Существуют определенные преобразователи тока и напряжение, разрешающие эксплуатацию двух электродвигателей одновременно под совместной нагрузкой. Хотя, у обоих моторов есть собственный частотник и линия дополнительного управления между преобразователями.
Два равных электродвигателя подключить проблематично. Поочередно можно подключить без проблем, даже различных по параметрам. Подключение делают через пускатели и выключатели пакетного типа.
Micromaster может производить управление двумя электродвигателями сразу. Значения параметров нужно создать правильно, установить защищенность от нагрева отдельно.
На один частотный преобразователь можно ставить два двигателя, но на разные два вала. В частотнике на одни контакты протянуть от соответствующего электромотора по одному.
Приведем пример. У нас имеется два мотора по 0,5 кВт. Мы хотим чтобы они эксплуатировались вместе на одной нагрузке 0,8 кВт на преобразователь частоты. Приобретать сразу два преобразователя нецелесообразно, они работают синхронно, и производить регулировку двух преобразователей частоты неудобно.
Присоединение сразу обоих электромоторов с одним преобразователем частоты тока влечет за собой некоторые нюансы. Основная трудность – это защищенность двигателей. Трудно найти проблему неисправности с одним из двигателей при включении в цепь параллельно. Например, на одном преобразователе работают два мотора заводские. Работали три фрезы. Одна фреза вышла из строя, затупилась. Из-за этого стал нагреваться частотный преобразователь. Необходимо устанавливать на все двигатели тепловые реле с защитой преобразователя на максимальный ток и напряжение. В противном случае реле защиты частотника тока не может распознать неисправность. Плохо, если есть выключатель имеется у выхода преобразователя. В случае обрыва двигателя во время работы частотный преобразователь выйдет из строя.
Тепловая защита имеет огромное значение, но возможно обойтись без нее. Разрешено на векторе быть без обратной связи, полное векторное трудно получить. В ходе эксперимента обнаружатся возможности. На исправном преобразователе на выходе все функционирует без трудностей. Если не перегружать конденсаторами частотники, то они служат долго.
На два электродвигателя хорошо подходят преобразователи Hyundai. Они имеют свою защиту от нагрева (тепловые реле), которая необходима на каждый мотор. Это определяется несколькими фактами:
- Нагрузка неравномерно распределена. Электрический ток разной величины на обоих двигателях.
- Наличие возможности выключения из работы одного мотора. Защита для мотора 0,8 кВт, встроенная в частотнике, не будет работать.
Рекомендуется делать равномерную нагрузку на частотник от обоих двигателей. Имеется ввиду нагрузка во время работы. Обрыв во время холостого хода нормально переносится преобразователем тока. При внезапном отключении напряжения питания пусковой выключатель, который коммутирует электродвигатель, отключался чаще, чем отключался частотник.
Что получилось
В итоге панель управления приобрела такой вид:
Установленный преобразователь частоты в работе, панель управления
Наклейки на кнопки я сделал при помощи программы Splan и самоклейки по методике, описанной в статье Моя эволюция маркировки.
Как всё работает, будет понятнее, если я приведу электрическую схему.
Подключение 2-х одинаковых электродвигателей
Преобразователь частоты переводят в режим скалярного управления. При работе на общую нагрузку, валы электродвигателей соединяют скользящей муфтой. Токи обмоток двигателя при этом должны быть равны. Для защиты рекомендуется устанавливать тепловые реле, которые подключают к дискретному входу частотника. Компания Danfoss выпускает также частотники со встроенными устройствами защиты. Включать в цепь “электродвигатель – частотный преобразователь” коммутирующие электроаппараты запрещается.
Схема подключения преобразователя частоты
После переделки вся схема станка, содержащая два привода, имеет вид:
Схема подключения преобразователя частоты
Первым делом скажу, что если делать всё по уму, то надо обеспечить защиту по входу – поставить быстродействующие предохранители или, на худой конец, автоматы с характеристикой “В”. Но что есть, то есть – из защиты только советский 3п С6.
Приводы вытяжки и полировки имеют две общих части – питание и кнопку “Стоп”. Кнопка “Стоп” (SB3) имеет два электрически независимых контакта, которые останавливают оба привода сразу.
Особо придирчивые читатели обязательно упрекнут меня в моих словах, что “ноль в питании станка не используется”. Но у меня готов ответ)))
Привод вытяжки подключен по классической схеме с самоподхватом, о которой я писал неоднократно. Ссылки – в начале статьи.
Рассмотрим поближе то, что нас интересует – схему подключения ПЧ:
Рабочая схема подключения ПЧ Delta
По силовой части я уже говорил, там всё просто.
По части управления. На схеме обозначены названия клемм, их видно и на фото установки. Чтобы вся схема работала правильно, все эти клеммы нужно правильно запрограммировать, без этого в подключении ПЧ никуда. Поэтому настройка ПЧ и его подключение – два неразрывно связанных понятия.
По настройке и подключению ПЧ
Схемы динамического торможения асинхронного двигателя постоянным током
Рисунок 1 — Схема динамического торможения асинхронного двигателя
Организация принудительной остановки асинхронного двигателя по электрическому принципу может быть осуществлена несколькими способами:
- Электродинамическим. Это классический вариант, при котором две фазы нужно закоротить и перевести на питания от цепи постоянного тока,
- Рекуперативным (генераторным). Характеризуется возвратом лишней электроэнергии в сеть,
- Противовключением. Этот вариант реализуется по схеме реверса, то есть с подключением фаз через пару магнитных пускателей,
- Самовозбуждением. Подключением к обмоткам статора батареи конденсаторов.
Мнение эксперта
It-Technology, Cпециалист по электроэнергетике и электронике
Задавайте вопросы «Специалисту по модернизации систем энергогенерации»
Преимущества асинхронного двигателя по сравнению с двигателем постоянного тока Очевидно, что режимы функционирования электродвигателей асинхронного типа напрямую зависят от их конструкции и общих принципов работы. Спрашивайте, я на связи!
Индикация скорости
А что, так можно было?
Крутая фишка многих ПЧ – выходные дискретные и аналоговые клеммы. На них можно запрограммировать множество событий. Например, в статье про установку ПЧ в лентопильный станок (труборезку) я рассказал, что выходное реле замыкается по достижении целевой частоты и дает сигнал на следующую функцию.
Тут я использовал аналоговый выход для индикации оборотов двигателя. Для этого установлена функция аналогового выхода “Индикация выходной частоты” (параметр 03.03 = 0). При этом максимальная частота 60 Гц соответствует напряжению 10 В. Я немного скорректировал показания вольтметра (на 3%) в параметре 03.04.
| Таблица скоростей ПЧ | ||
| Показания вольтметра | Вых. Частота | Обороты двигателя |
| 3,4 | 20 | 1200 |
| 5,1 | 30 | 1800 |
| 6,8 | 40 | 2400 |
| 8,4 | 50 | 3000 |
| 9,3 | 55 | 3300 |
| 10 | 60 | 3600 |
Выходное аналоговое напряжение подается на вольтметр постоянного напряжения с пределом 30 В. В результате оператор станка на индикаторе наблюдает число, которое однозначно соответствует скорости полировки.