Ёмкостные, индуктивно-ёмкостные, активные сглаживающие фильтры. Схемы, свойства, онлайн калькулятор.
Потолковали мы основательно на предыдущей странице про разные виды диодных выпрямителей, перебросились парой фраз на тему простейших ёмкостных фильтров, а вопрос достижения параметра коэффициента пульсаций Кп в пределах 10 -5 . 10 -4 так и повис в воздухе – уж очень немалым получается номинал ёмкости сглаживающего конденсатора.
Коэффициент пульсаций выпрямленного напряжения Кп является важнейшим параметром выпрямителя. Его численное значение равно отношению амплитудного значения пульсирующего напряжения к его постоянной составляющей. Напомню выдержку из печатного издания, приведённую на предыдущей странице:
«Коэффициент пульсаций выбирают самостоятельно в зависимости от предполагаемой нагрузки, допускающей питание постоянным током вполне определённой «чистоты»: 10 -3 . 10 -2 (0,1-1%) – малогабаритные транзисторные радиоприёмники и магнитофоны, 10 -4 . 10 -3 (0,01-0,1%) – усилители радио и промежуточной частоты, 10 -5 . 10 -4 (0,001-0,01%) – предварительные каскады усилителей звуковой частоты и микрофонных усилителей.»
Помимо этого в характеристиках выпрямителей может использоваться и понятие коэффициента фильтрации (коэффициента сглаживания). Коэффициент фильтрации, он же коэффициент сглаживания – величина, численно равная отношению коэффициента пульсаций на входе фильтра к коэффициенту пульсаций на выходе фильтра Кс = Кп-вх/Кп-вых . Для многозвенных фильтров коэффициент фильтрации равен произведению коэффициентов фильтрации отдельных звеньев.
В слаботочных цепях вопрос снижения пульсаций решается легко и кардинально – применением интегральных стабилизаторов. Параметр подавления пульсаций (Ripple Rejection) у подобных массовых ИМС составляет не менее 50дБ (в 360раз по напряжению), что при высокой «чистоте» выходного напряжения позволяет уменьшить ёмкости электролитов в 5-10 раз.
Если же у разработчика нет возможности (либо желания) включать в состав устройства стабилизаторы напряжения, то реальным подспорьем окажутся индуктивно-ёмкостные или активные сглаживающие фильтры.
Начнём с фильтров, выполненных из индуктивных элементов – дросселей и из ёмкостных элементов – конденсаторов.
Рис.1
На Рис.1а приведена схема простейшего ёмкостного сглаживающего фильтра. Принцип действия заключается в накоплении электрической энергии конденсатором фильтра и последующей отдачи этой энергии в нагрузку.
Для того чтобы не ограничиваться 50-ти герцовыми блоками питания, но и иметь возможность расчёта фильтров импульсных ИБП, приведу универсальные формулы, учитывающие частоту входного сигнала F : С1 = Iн/(3,14×Uн×F×Кп) для однополупериодных выпрямителей и С1 = Iн/(6,28×Uн×F×Кп) – для двухполупериодных. Кп – это коэффициент пульсаций, равный отношению амплитудного значения пульсирующего напряжения к его постоянной составляющей, а F – частота переменного напряжения на входе диодного выпрямителя.
Переходим к индуктивно-ёмкостным LC фильтрам. ВНИМАНИЕ. Потребность в такого рода цепях возникает исключительно в случаях необходимости получить низкий уровень пульсаций в достаточно мощных сетевых блоках питания, либо в высокочастотных импульсных ИБП. Связано это с тем, что для эффективной работы LC-фильтра, индуктивное сопротивление катушки XL на частоте подавления стремятся сделать значительно больше Rн. А это, в свою очередь, приводит к тому, что в условиях низких частот и малых токов (высоких Rн) индуктивность дросселя получается необоснованно высокой.
Г-образный индуктивно-ёмкостной LC фильтр 2-го порядка (Рис.1б) обладает значительно лучшими фильтрующими свойствами по сравнению с обычным ёмкостным. Произведение LC (Гн*мкФ) зависит от необходимого коэффициента сглаживания фильтра и определяется по приближенной формуле: L1(Гн)×С1(МкФ) = 25000/(F 2 (Гц)×Кп) для однополупериодных выпрямителей и L1×С1 = 12500/(F 2 ×Кп) – для двухполупериодных, где С1(МкФ)/L1(мГн) = 1000/Rн 2 (Ом) .
Схема П-образного LC-фильтра приведена на Рис.1в. Сглаживающее действие П-образного LC-фильтра можно упрощённо представить как совместное действие двух фильтров, описанных выше, а коэффициент сглаживания – как произведение коэффициентов сглаживания звеньев: ёмкостного и Г-образного индуктивно-ёмкостного. Наилучшими фильтрующими свойствами обладают LC-фильтры Чебышева. Напишем формулу, исходя из рекомендаций, изложенных на странице ссылка на страницу: С1 = С2 ; С1(МкФ)/L1(мГн) = 1176/Rн 2 (Ом) .
Уменьшить напряжение пульсаций на выходе однозвенного П-образного LC-фильтра можно, включив параллельно дросселю L1 неполярный конденсатор С3 (Рис.1г), который вместе с индуктивностью катушки образует режекторный фильтр. Если ёмкость конденсатора С3 выбрать такой, чтобы резонансная частота контура L1-С3 равнялась частоте пульсаций (F при однополупериодном выпрямлении или 2F при двухполупериодном), то большая часть напряжения пульсаций задержится этим контуром и лишь незначительная перейдёт в нагрузку. Итак: С3 = 1/(39,44×L1×F 2 ) для однополупериодных выпрямителей и С3 = 1/(9,86×L1×F 2 ) – для двухполупериодных. Все остальные номиналы элементов – такие же, как в предыдущей схеме.
Давайте сдобрим пройденный материал онлайн таблицей.
КАЛЬКУЛЯТОР РАСЧЁТА ЭЛЕМЕНТОВ СЛАЖИВАЮЩЕГО ФИЛЬТРА БЛОКА ПИТАНИЯ.
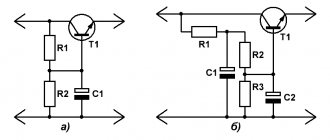
Транзисторные фильтры по сравнению с ёмкостными сглаживающими фильтрами имеют меньшие габариты, массу и более высокий коэффициент сглаживания пульсаций. Они позволяют уменьшить в десяток раз (при том же уровне пульсаций) номинал сглаживающего конденсатора, либо уменьшить в аналогичное количество раз амплитуду пульсаций при неизменном значении ёмкости.
Рис.2
На Рис.2а представлена схема наиболее распространённого транзисторного фильтра.
Напряжение с высокой амплитудой пульсаций, поступающее на коллектор транзистора, по сути, является напряжением питания эмиттерного повторителя, образованного Т1. В это же самое время цепь базы питается через резисторы смещения и интегрирующую цепь R1C1, которая сглаживает пульсации напряжения на базе. Чем больше постоянная времени T=R1C1, тем меньше пульсации напряжения на базе, а так как устройство представляет собой эмиттерный повторитель, то на выходе фильтра пульсации будут столь же малыми, как и на базе. Для того, чтобы снизить зависимость напряжения на выходе фильтра от уровня передаваемой мощности, ток через делитель R1R2 выбирают в 5…10 раз большим, чем ток, ответвляющийся в базу при минимальном сопротивлении нагрузки. При расчёте номиналов элементов делителя, следует исходить из напряжения на базе транзистора: Uб = Uвх – Uвх пульсаций – (2,5. 3В) . В этом случае будет обеспечена работа регулирующего транзистора в активном режиме, а падение напряжения на нём составит величину: Uкэ = Uвх пульсаций + (3,1. 3,6В) . Коэффициент полезного действия транзисторного фильтра будет тем больше, чем меньше падание постоянного напряжения на силовом транзисторе. Из формулы видно, что для обеспечения высокого КПД активного сглаживающего фильтра, на вход устройства следует подавать уже отфильтрованное до определённого уровня напряжение. На практике это делается включением на вход простейшего ёмкостного фильтра (Рис.1а), уровень пульсаций которого можно посчитать на приведённом выше калькуляторе.
Эффективность активных сглаживающих фильтров напрямую зависит от величины коэффициента усиления транзистора. Чем выше h21 полупроводника, тем больших величин можно выбрать номиналы резисторов R1, R2 – тем лучшими фильтрующими свойствами будет обладать схема. Поэтому в данной ситуации не стоит даже рассматривать транзисторы с h21<50. Но при этом и составные транзисторы, обладающие высоким усилением – также не являются оптимальным выбором в силу повышенных падений напряжений на p-n переходах, значительно снижающих КПД транзисторных устройств.
Улучшаем компьютерный блока питания
Наши друзья меньшие (Китайцы) заполонили рынок электроники, но не всегда они бывают добросовестные, но многие дорогие модели компьютерных блоков питания достойные в своем классе. Но все-же большинство блоков питания, как я их называю кастрированные, то есть когда печатная плата была разработана под одни элементы, а в ней впаяны другие, и не все, особенно это по по входным фильтрам, их почти никогда нет в дешевых моделях.
Структурная схема ATX
Главный недостаток всех дешевых БП
осциллограмма напряжений +5В дешевого БП.
Входные ЭМП-фильтры
Входные и выходные фильтры — необходимая составляющая практически любой электронной системы, в состав которой входят импульсные преобразователи или быстродействующие компоненты. И хотя входные ЭМП-фильтры и выходные сглаживающие фильтры служат разным целям, их конфигурация в ряде случаев может быть схожа.
Основное назначение входных фильтров заключается в защите от электромагнитных помех (ЭМП), генерируемых преобразователем, а также защита от возможных помех со стороны сети. Во многих случаях наилучшим выбором является покупной ЭМП-фильтр, в котором предусмотрена фильтрация дифференциальных и синфазных помех. Эти фильтры устанавливаются между питающей сетью и AC/DC-преобразователем. В состав фильтров входят магнитосвязанные дроссели и емкости. В общем случае схема такого фильтра представлена на рис. 1.
Рис. 1. Схема синфазного и дифференциального ЭМП-фильтра
В этом ЭМП-фильтре последовательно включены два фильтра. Ближний к сети ЭМП-фильтр дифференциальных помех состоит из конденсаторов CY5, CY6, CX2 и магнитосвязанного двухобмоточного дросселя LDM. Последовательно с ним установлен ЭМП-фильтр дифференциальных помех, в состав которого входят конденсаторы CY3, CY4, CX1 и магнитосвязанный двухобмоточный дроссель LCM.
Как видно из рисунка, ЭМП-фильтры синфазных и дифференциальных помех имеют схожую конфигурацию за исключением расположения начала и конца обмоток дросселей LDM и LCM. Различие объясняется следующим образом. Токи дифференциальных помех в фазе и нейтрали протекают в разных направлениях, а токи синфазных помех в фазе и нейтрали текут в одном направлении и замыкаются через корпус или заземление. Таким образом, в обоих дросселях магнитные потоки, создаваемые двумя обмотками, складываются. Следовательно, индуктивность дросселя возрастает, и ЭМП-фильтр работает как классический LC-фильтр.
Описанные выше ЭМП-фильтры, как правило, устанавливаются в линиях сетевого напряжения 220 В на входе AC/DC-преобразователя. ЭМПфильтры производятся многими известными на российском рынке электроники компаниями, среди которых Murata, Epcos, Würth Elektronik и многие другие.
Автор настоятельно рекомендует использовать покупные фильтры и не пытаться изготавливать их самостоятельно из дискретных компонентов. Не следует использовать ЭМП-фильтры для цепей переменного тока в цепях постоянного тока. Постоянный ток создаст подмагничивание дросселей фильтра, а всплески токов помех приводят к насыщению сердечника дросселя, что влечет за собой уменьшение их индуктивности и, следовательно, фильтрующих свойств.
Однако не всегда можно использовать готовые ЭМП-фильтры. Например, в распределенных системах питания в цепях постоянного тока после шинного преобразователя или перед ним может понадобиться установить ЭМП-фильтр перед PoL-преобразователем. В этом случае, скорее всего, придется создать такой фильтр на дискретных компонентах, особенно если невелика мощность преобразователя, перед которым устанавливается фильтр.
Примером может служить LC-фильтр, показанный на рис. 2. Поскольку фильтр описывается уравнением 2‑го порядка и представляет собой хорошо известное колебательное звено, мы лишь приведем окончательные соотношения.
Рис. 2. ЭМП-фильтр LC-типа
Собственная частота колебательного звена определяется из соотношения (1):
ω0 = 1/√LC. (1)
Величина демпфирования определяется из соотношения (2):
β = (R/2) × (√C/L). (2)
В схеме на рис. 2 отсутствует резистор R в явном виде, поэтому такой фильтр называется недемпфированным, но это не значит, что R = 0 и любое входное воздействие порождает в фильтре незатухающие колебания. Величина R складывается из омического сопротивления дросселя RDC, эквивалентного последовательного сопротивления конденсатора (ESR) и сопротивления проводников. Передаточная характеристика этого фильтра показана на рис. 3.
Рис. 3. Передаточная характеристика LC-фильтра
Как видно из этого рисунка, чем меньше степень демпфирования β, тем ярче выражен резонансный пик в частотной области. Также при условии β<1, чем меньше β, тем более явно выражен колебательный переходный процесс во временной области. В последнем случае вполне уместен афоризм «лучшее – враг хорошего». Известны случаи, когда из-за использования в шинах постоянного тока высококачественных конденсаторов с очень малым ESR возникали колебания напряжения на шине именно из-за малой величины ESR, т. к. при сокращении ESR уменьшалась степень демпфирования и возрастала колебательность переходного процесса.
Следует учесть еще одно обстоятельство: ЭМП-фильтр будет работать так, как рассчитано, лишь в том случае, если его выходной импеданс существенно меньше, чем входной импеданс преобразователя. В противном случае подключение к выходу фильтра преобразователя заметно исказит характеристики фильтра. И фильтр может исказить работу преобразователя.
Входную цепь преобразователя в общем случае можно представить в виде последовательной RLC-цепочки. Таким образом, у частотной характеристики импеданса появится экстремум в виде минимума. Чтобы устранить взаимовлияние ЭМП-фильтра и преобразователя, желательно, чтобы выходной импеданс преобразователя был на порядок меньше входного импеданса ЭМП-фильтра.
На рис. 4 приведен пример частотной зависимости импедансов ЭМП-фильтра и преобразователя. Из этого рисунка, а также из приведенных выше соображений ясно, что величина демпфирования не должна быть слишком малой. С другой стороны, чрезмерное увеличение β устранит колебательность, переходный процесс станет апериодическим и затянется во времени. Как правило, оптимальное значение β следует выбирать в пределах 0,5–1,0.
Рис. 4. Частотные зависимости импедансов ЭМП-фильтра и преобразователя
При недемпфированном фильтре (рис. 2) значение R в соотношении (2) в основном определяется суммой RDC + ESR, но этой величины недостаточно, чтобы увеличить β до 0,7–1,0. Следовательно, требуется ввести дополнительное сопротивление. Наилучший вариант введения демпфирующей цепочки показан на рис. 5. Цепочка Z3 состоит из последовательно соединенных резистора Rd и конденсатора Cd. Последний блокирует постоянное напряжение и предотвращает дополнительную потерю мощности на резисторе Rd. Коэффициент демпфирования ЭМП-фильтра с демпфирующей цепочкой описывается выражением (3):
βd = (n/n + 1) [(Rd/2) × (√C/L)], (3)
где n = Cd/C.
Рис. 5. Демпфированный LC-фильтр
Из практических соображений величина n должна находиться в пределах 4–7 единиц. На рис. 6 показана частотная зависимость импедансов демпфированного и недемпфированного фильтров. Резонансный пик демпфированного ЭМП-фильтра существенно меньше, чем у недемпфированного. Демпфирующую цепочку можно составить из последовательной RL-цепочки и подсоединить ее параллельно индуктивности фильтра, но это не самое лучшее, на наш взгляд, решение, т. к. увеличивается мощность рассеяния на резисторе.
Рис. 6. Частотные зависимости импедансов демпфированного и недемпфированного LC-фильтра
Если последовательно включить несколько LC-фильтров, увеличится крутизна спада АЧХ ЭМП-фильтра в области ω>ω0, и улучшится фильтрация помех, но, как представляется автору, такое решение не имеет смысла. Габариты решения заметно возрастут, а увеличение крутизны спада АЧХ фильтра не принесет практической выгоды. Рабочая частота PoL-преобразователей в настоящее время находится в диапазоне примерно 1–2 МГц.
С учетом требований стандартов частота среза ЭМП-фильтра должна находиться в пределах нескольких кГц. Если выбрать величину β ≈ 1, то ослабление на частоте 1 МГц составит 50–60 дБ, что вполне достаточно для подавления помех. Если все же потребуется более значительное ослабление, возможно, следует подумать не о применении двухкаскадного ЭМП-фильтра, а проанализировать систему питания и принять иные меры к уменьшению помех.
Устройство
Если говорить об устройстве такой вещи, как сетевой фильтр, то следует сказать, что он может относиться к одной из 2 категорий:
- стационарно-многоканальной;
- встроенной.
В целом схема обычного сетевого фильтра, рассчитанного на напряжение в 220 В, будет стандартной и в зависимости от типа устройства может лишь чуть-чуть отличаться.
Если говорить о встроенных моделях, то их особенностью является то, что контактные платы таких фильтров будут часть внутреннего устройства электронного оборудования.
Такие платы имеет и другая техника, что относится к категории сложных. Такие платы обычно состоят из следующих компонентов:
- конденсаторы добавочного типа;
- индукционные катушки;
- дроссель тороидального типа;
- варистор;
- предохранитель термического типа;
- VHF-конденсатор.
Варистором является резистор, что имеет переменное сопротивление. Если нормативный порог напряжения в 280 вольт превышается, то его сопротивление снижается. Причем оно может снизиться не в один десяток раз. Варистор по своей сути представляет предохранитель от импульсного перенапряжения. А стационарные модели обычно отличаются тем, что имеют несколько розеток. Благодаря этому появляется возможность подключить через сетевой фильтр к электрической сети несколько моделей электрической техники.
Кроме того, все сетевые фильтры оснащены LC-фильтрами. Такие решения применяются для аудиотехники. То есть такой фильтр – помехоподавляющий, что для аудио и работы с ним будет крайне важно. Также сетевые фильтры иногда оснащаются термическими предохранителями, что позволяют предотвратить появление скачков напряжения. Иногда в ряде моделей используются одноразовые предохранители плавкого типа.
Выходные сглаживающие фильтры
В качестве сглаживающих выходных фильтров используются те же LC-фильтры, которые были рассмотрены выше. Однако в данном случае такие фильтры не удастся заменить покупными, и их всякий раз приходится рассчитывать разработчику. Выходной сглаживающий фильтр позволяет снизить пульсации выходного напряжения до единиц мВ или даже нескольких сотен мкВ. Уменьшение амплитуды пульсаций до десятков мкВ едва ли возможно, даже если увеличить число каскадов выходного фильтра.
Уменьшению пульсаций помешают паразитные составляющие компонентов фильтра и проводников печатной платы. Кроме того, из-за джиттера частоты коммутации в спектре выходного напряжения могут возникать низкочастотные составляющие вплоть до нескольких Гц. Их, конечно, невозможно подавить сглаживающим фильтром. Таким образом, если требуется ограничить пульсации выходного напряжения вплоть до мкВ, после сглаживающего фильтра в цепь питания устанавливается LDO-регулятор.
Рис. 7. Сглаживающий фильтр на выходе повышающего преобразователя
Рассмотрим наиболее распространенную конфигурацию сглаживающего фильтра – π-фильтр (или П-фильтр). Схема его включения в цепь повышающего преобразователя приведена на рис. 7 [1]. Резонансная частота этого фильтра определяется из выражения (4).
В отличие от ЭМП-фильтра, сглаживающий фильтр входит в состав контура обратной связи, поэтому частота среза фильтра не должна быть меньше 10–20% частоты коммутации. В противном случае уменьшается устойчивость системы из-за запаздывания в петле обратной связи, что приводит к затягиванию переходных процессов, а также к ухудшению устойчивости из-за уменьшения запаса по фазе. Как и в случае с ЭМП-фильтрами, в сглаживающий фильтр необходимо ввести демпфирующую цепочку. На рис. 7 показаны три возможных варианта цепочек демпфирования.
Вариант демпфирования 1 с введением резистора RFILT представляется самым простым и экономичным, но введение этого резистора ослабляет эффективность фильтра. Кроме того, уменьшается импеданс параллельной RL-цепочки фильтра. Вариант демпфирования 2 наиболее эффективен, т. к. эта цепочка улучшает характеристику фильтра, но увеличивает стоимость из-за использования керамического конденсатора. На первый взгляд может показаться, что вариант демпфирования 3 – самый эффективный. Однако в этом случае требуется наибольшая емкость конденсатора. Следовательно, возрастает стоимость решения. К тому же, поскольку введение этой цепочки уменьшит полосу пропускания петли обратной связи, этот вариант следует исключить из рассмотрения.
Для высокочастотных преобразователей с малым выходным током имеется еще один нетривиальный вариант сглаживающего фильтра — вместо дросселя в фильтре используется резистор. Рассмотрим простой пример, где в качестве выходного фильтра PoL-преобразователя с частотой коммутации 2 МГц и выходным током 20 мА применяется RC-фильтр. Пусть сопротивление резистора равно 10 Ом, а емкость конденсатора — 1 мкФ. Частота среза этого фильтра составит около 16 кГц; учитывая ослабление 20 дБ/декаду, получим, что пульсации с частотой 2 МГц ослабляются более чем в 100 раз. Однако придется смириться с падением напряжения 200 мВ на резисторе.
Заметим, что расчет фильтров носит приблизительный характер и расчетные параметры обязательно должны проверяться путем макетирования фильтра совместно с преобразователем. На величину емкости фильтра влияет напряжение заряда, частота пульсации тока, температура емкости. Индуктивность дросселя фильтра нелинейно зависит от тока. Кроме того, на характеристики фильтра будет влиять и преобразователь. Эти изменения невозможно учесть в практических расчетах. Помощь при разработке фильтра оказывают фирменные САПР для расчета фильтров. Например, схему расчета сглаживающего фильтра можно найти в [1]. Для расчета ЭМП-фильтра можно воспользоваться средствами [2].
Переходная характеристика
Выходное напряжение должно оставаться стабильным при изменениях напряжения на входе импульсного преобразователя. Аналогично, в случае внезапного снижения или повышения выходного тока выходное напряжение должно быть быстро отрегулировано. На рисунке 10 показана переходная характеристика импульсного контроллера с регулируемой устойчивостью (кривая желтого цвета) с выходным напряжением 5 В при внезапном изменении нагрузочного тока с 0 до 1 А (зеленая кривая).
Рис. 10. Переходная характеристика устойчивого импульсного контроллера
При внезапном изменении нагрузочного тока управляющая схема должна быстро скорректировать выходное напряжение до заданного уровня. Выходное напряжение не должно значительно меняться в результате отклика на скачок – иначе из-за перенапряжения могут повредиться электронные цепи. В идеальном случае после скачка нагрузки выходное напряжение быстро корректируется до установленной величины; при этом отсутствуют выбросы и даже звон. Звон на этапе компенсации обусловлен нестабильной работой импульсного преобразователя. Функционирование контроллера импульсного ИП считается устойчивым, если он достаточно быстро реагирует на скачкообразное изменение нагрузки и своевременно компенсирует это изменение.
Выводы
Итак, если выходной фильтр установлен в управляющем контуре, его характеристическое уравнение имеет 2.й порядок или выше, что зависит от типа фильтра. Цепь компенсации должна иметь не меньший порядок, что приводит к увеличению инерционности управляющего контура. Таким образом, не рекомендуется включать выходной фильтр в управляющий контур. Выходное напряжение преобразователя следует снимать до выходного фильтра.
Целесообразно также выбирать дроссели фильтра и ферриты с наименьшими сопротивлениями RDC, чтобы уменьшить потери в выходном фильтре. Техническая поддержка