4 февраля 2015
Bournsстатья
В номенклатуру энкодеров, выпускаемых компанией Bourns, входят изделия, изготовленные по трем существующим технологиям: контактные механические (для бытовых применений, а также для неответственных лабораторных и промышленных приложений), бесконтактные оптические (для аудиотехники, прецизионной измерительной, авиационной и медицинской техники, ответственных промышленных применений), бесконтактные магнитные (для сервоприводов, робототехники и точных станков).
Энкодеры – электромеханические устройства, позволяющие преобразовывать характеристики механического движения в удобную для обработки форму электрических сигналов. Они используются для определения таких параметров как угловое положение, направление, скорость и частота вращения.
Рис. 1. Номенклатура энкодеров Bourns
Области применения энкодеров обширны: от промышленных систем до медицинских приборов. Каждое конкретное приложение выдвигает вполне определенные требования к используемым энкодерам. Компания Bourns выпускает широкий спектр энкодеров с различными характеристиками, которые отвечают самым взыскательным запросам (рисунок 1):
- контактные механические, бесконтактные оптические, бесконтактные магнитные;
- квадратурные, с выходами типа «направление/шаг», абсолютные цифровые, абсолютные с ШИМ-выходом;
- со сроком службы до сотен миллионов оборотов;
- с разрешением до 1024 состояний на оборот;
- с максимальной частотой до 10 000 оборотов в секунду;
- с уровнем пыле- и влагозащищенности до IP65;
- для создания взаимодействия «пользователь-машина» (HM Interface) и «машина-машина» (MMI);
- для монтажа в отверстия, для поверхностного монтажа, монтажа на блок с дополнительным гибким кабелем.
Наиболее популярными сериями поворотных энкодеров производства компании Bourns являются PEC11, PEC12, PEC16, PEL12, ECW, EAW, EPS, EMS22, EM14, EN (рисунок 2).
Рис. 2. Внешний вид наиболее популярных серий энкодеров Bourns
Достоинства и недостатки энкодеров в значительной степени зависят от принципа их действия. В общем случае энкодеры делят на два типа: механические контактные и бесконтактные. Бесконтактные бывают двух видов: оптические и магнитные.
Компания Bourns производит энкодеры всех трех типов:
- механические контактные: PEC11, PEC12, PEC16, PEL12, ECW, EAW, EPS;
- бесконтактные оптические: EM14, ;
- бесконтактные магнитные: EMS22.
Рассмотрим коротко принцип действия каждого из них.
Механические контактные энкодеры по принципу функционирования напоминают галетные переключатели. Основными составными частями таких энкодеров являются кодирующий элемент и скользящие контакты.
Кодирующий элемент представляет собой общий контакт сложной формы. При повороте вала энкодера скользящие контакты перемещаются, периодически замыкаясь на кодирующий элемент (общий контакт).
Контактные квадратурные энкодеры имеют пару скользящих контактов (A и B). Они выполнены таким образом, что диаграммы их замыкания на кодирующий элемент оказываются сдвинутыми на 90° (рисунок 3). По порядку следования сигналов определяется направление вращения. По числу импульсов можно судить о частоте оборотов.
Рис. 3. Диаграммы сигналов квадратурного энкодера
Квадратурный энкодер может быть достаточно просто реализован с помощью оптических схем.
Бесконтактные оптические энкодеры. Конструкция приборов данного типа подразумевает использование нескольких основных элементов (рисунок 4): источников света, кодирующего диска, фотоприемников.
Рис. 4. Структура оптического энкодера
Кодовый диск имеет просветы (окна), через которые может проникать световой поток, создаваемый источниками света (ИК-светодиодами). Если свет прошел через окно на диске, то он фиксируется фотоприемником. Если свет не попадает в окно – то он отражается от диска и не фиксируется приемником.
При вращении вала световой поток периодически прерывается диском и формирует переменный выходной сигнал приемника. Частота сигнала пропорциональна частоте вращения вала.
В оптических энкодерах производства Bourns фотоприемники входят в состав специальной интегральной схемы ASIC (Application-specific integrated circuit). Эта ИС преобразует сигнал приемников в электрические выходные сигналы (рисунок 4).
В случае квадратурного энкодера формируются два сигнала, сдвинутых на 90°.
Бесконтактные магнитные энкодеры. Приборы этого типа используют эффект Холла, который заключается в образовании разности потенциалов на поверхности проводящего материала при протекании через него тока при наличии внешнего магнитного поля. Этот эффект был открыт Эдвином Холлом в 1879 году. Рассмотрим его более подробно.
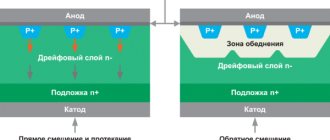
Как известно, на электрический заряд, движущийся в магнитном поле, действует сила Лоренца, смещающая заряд в направлении, перпендикулярном направлению тока (рисунок 5).
Рис. 5. Принцип действия магнитных энкодеров
Если поместить в магнитное поле проводящую или полупроводниковую пластину и пропустить через нее ток, то под действием силы Лоренца электроны начнут смещаться и скапливаться на одной из поверхностей пластины. Дырки будут скапливаться на противоположной поверхности. Возникнет разность потенциалов.
В энкодерах вращение вала приводит к изменению магнитного поля и соответствующему изменению напряжения датчика Холла. При постоянном вращении возникает синусоидальное напряжение. Электронная схема усиливает и преобразует этот сигнал в удобную для обработки форму. На базе датчиков Холла строят инкрементальные абсолютные ШИМ-энкодеры.
Использование того или иного принципа функционирования во многом определяет значения эксплуатационных характеристик энкодеров.
Что такое энкодер?
Энкодер – это электронный датчик, который механически крепится на какой-либо вращающейся детали. Обычно корпус энкодера остается неподвижным, а вращается только его вал. Это позволяет с необходимой точностью измерять разные параметры :
- скорость вращения,
- расстояние (длину),
- направление вращения,
- угловое положение по отношению к нулевой метке.
Энкодер является самым распространенным «измерительным инструментом» в современном промышленном оборудовании. Фактически энкодер является датчиком обратной связи, на выходе которого цифровой сигнал меняется в зависимости от его вращения или от угла его поворота. Этот сигнал обрабатывается в счетчике или контроллере, который выдает команды на устройство индикации или привод.
Этикетка инкрементного энкодера Sick, установленного на валу двигателя постоянного тока. Основной параметр – 1024 импульса на оборот
Энкодеру найдено множество применений, учитывая возможности последующей обработки его сигнала. Например – измерение погонной длины какого-либо материала, измерение угла открытия/закрытия задвижки, точное позиционирование деталей при перемещении и обработке. Конкретные примеры будут ниже.
Энкодеры, о которых идёт речь в статье, в некоторых источниках называются датчиками углового перемещения, датчиками угла поворота, и даже “N-кодером”.
А вообще энкодер – это любое устройство, которое преобразовывает или декодирует какой-то сигнал или информацию.
Где применяют энкодеры
На вопрос, что это за устройство такое — энкодер, можно ответить перечислением того, где используют данные приборы. Сферы применения угловых датчиков зависят от их сложности и способности выдерживать нагрузки.
Датчики поворота используют наиболее часто на станкостроительных заводах, в системах точного перемещения, робототехнических комплексах, в измерительных устройствах, где требуется точная фиксация поворотов, наклонов, вращений.
В промышленности и сложных механизмах, используют высокопроизводительные энкодеры, устойчивые к тепловому воздействию и взрывам.
Другие области и механизмы, в которых применяют эти датчики:
- в печатной промышленности: устройства устанавливают на валах, по которым движется бумага;
- в автомобилестроении: с их помощью определяют угол поворота колес (иногда взаимодействуют с движками);
- на металлообрабатывающих предприятиях для контроля вращения валов с металлическими лентами;
- в химической и пищевой промышленности: на оборудовании автоматизированной фасовки;
- в электротехнике.
Пример использования прибора есть почти в каждом современном доме. Это обычная компьютерная мышь, в которой также установлен такой датчик.
Принципы работы и устройство энкодеров
Существует два вида энкодеров по конструкции и виду выходного сигнала – инкрементальный (инкрементный) и абсолютный.
Инкрементальный энкодер устроен проще сравнению с абсолютным, и используется в большинстве случаев. Такой энкодер можно представить как диск с прорезями, который просвечивается оптическим датчиком. При вращении этого диска датчик будет активироваться или деактивироваться зависимости от своего положения над прорезью. В результате на выходе энкодера формируется последовательность дискретных импульсов, частота которых зависит от разрешения энкодера и его частоты вращения.
Типичный пример в цифрах – одному полному обороту энкодера соответствует 1000 дискретных изменений уровня сигнала, которые говорят об его угловом положении. В инструкции к такому энкодеру будет написано: “Разрешение – 1000 импульсов на оборот”. В более совершенных моделях на один оборот приходится 2000, 4000 и более импульсов. Бывают и программируемые энкодеры, разрешение которых пользователь может менять в очень широких пределах – например, от 1 до 65536 импульсов на оборот.
Например, если энкодер закреплен на валу асинхронного двигателя, который вращается с частотой 1500 оборотов в минуту, то при разрешении энкодера 1000 импульсов на оборот частота выходных импульсов будет равна 25 кГц.
Разрешение и максимальная частота вращения обратнозависимы – ведь не может же частота выходных импульсов исчисляться гигагерцами. Обычно выходная частота ограничена значением около 500 кГц. Да и не всякий контроллер “скушает” такую частоту. Делаем вывод: энкодер с разрешением 1000 имп/оборот (наиболее распространенный) не может крутиться с частотой выше 500 Гц или 30000 об/мин. Но такие скорости в механике я лично не встречал. Делаем второй вывод: высокое разрешение не всегда хорошо.
Пример, поясняющий работу энкодера:
Конструкция, поясняющая работу оптического энкодера
На фото – не энкодер, но данная конструкция в первом приближении прекрасно иллюстрирует работу и устройство инкрементального оптического энкодера. Про щелевой оптический датчик я писал в статье про оптические датчики, там подробнее.
Бич подобных конструкций – при механической поломке, связанной со смещением диска (или другого активатора), датчик легко ломается… В энкодере такого не может быть – там всё надёжно закреплено и защищено.
Основной минус инкрементального энкодера – необходимость непрерывной обработки его выходного сигнала. Кроме того, чтобы узнать положение инкрементального энкодера после подачи на него питания, необходимо провести инициализацию для поиска нуль-метки (что это такое – расскажу позже) либо для поиска нулевого положения механизма.
Абсолютный энкодер имеет более сложное устройство, но он позволяет определить угол поворота в любой момент времени, даже в неподвижном состоянии механизма сразу после включения питания. Говоря простыми словами, выходной сигнал у него – это параллельный код (например, 8-разрядный, имеющий 256 значений), который соответствует углу поворота. Соответствующую конфигурацию имеют и прорези в диске энкодера.
Абсолютные энкодеры работают в сложном оборудовании – там, где в любой момент времени (в том числе, в момент подачи питания) нужно знать точное положение объекта. Но сейчас, с появлением дешевых контроллеров с энергонезависимой памятью, в 99% используются инкрементальные энкодеры. Тем более учитывая, что их цена в несколько раз ниже, чем у абсолютных. Да и обрабатывать последовательные импульсы гораздо проще, чем параллельный код.
Использовать абсолютный энкодер для определения скорости вращения – всё равно, что использовать мощный настольный компьютер только для прослушивания музыки в ВК.
Бывают энкодеры не оптического принципа работы. Но я про них ничего рассказывать не буду, поскольку не имел с ними дела..
Русские Блоги
1. Классификация энкодеров
По принципу обнаружения энкодер можно разделить на оптический, магнитный, индуктивный и емкостной, а по методу масштабирования и форме выходного сигнала — на три типа: инкрементный, абсолютный и гибридный.
1. Инкрементальный энкодерИнкрементальные энкодеры напрямую используют принцип фотоэлектрического преобразования для вывода трех наборов прямоугольных импульсов A, B и Z; импульсы A и B имеют разность фаз 90. , Так что направление вращения можно легко определить, а фаза Z составляет один импульс на оборот, используемый для позиционирования контрольной точки. Его преимущества заключаются в простой конструкции, среднем механическом сроке службы более десятков тысяч часов, высокой помехоустойчивости, высокой надежности и пригодности для передачи на большие расстояния. Недостатком является невозможность вывода информации об абсолютном положении вращения вала.
2. Абсолютный энкодерАбсолютный энкодер — это датчик, который напрямую выводит числа. На его круглом кодовом диске имеется несколько концентрических кодовых дисков в радиальном направлении. Каждая дорожка состоит из светопропускающих и непрозрачных секторов. Секторы соседних кодовых каналов Взаимосвязь между деревьями в области удваивается.Количество кодовых каналов на кодовом диске — это количество двоичных цифр. На одной стороне кодового диска находится источник света, а на другой стороне — светочувствительный элемент, соответствующий каждому кодовому каналу. Когда диск находится в разных положениях Когда, каждый светочувствительный элемент преобразует соответствующий сигнал уровня в соответствии с тем, получает он свет или нет, и формирует двоичное число. Особенность этого типа энкодера состоит в том, что он не требует счетчика и может считывать фиксированный цифровой код, соответствующий положению в любом положении вала. Очевидно, должно быть N доктрин. В настоящее время в Китае есть 16-битные абсолютные энкодеры.
3. Гибридный абсолютный энкодерГибридный абсолютный энкодер, он выводит два набора информации, один набор информации используется для определения положения магнитного полюса с функцией абсолютной информации; другой набор точно такой же, как выходная информация инкрементального энкодера.
2. Применение фотоэлектрического кодировщика
1. Измерение угла
В симуляторе вождения автомобиля фотоэлектрический кодировщик выбран в качестве датчика для измерения угла поворота рулевого колеса. В измерителе силы тяжести используется фотоэлектрический энкодер для соединения его вала с валом компенсационной ручки гравиметрического инструмента. Измеритель угла кручения использует энкодер для измерения изменений угла кручения, таких как экспериментальная машина на кручение, тест эффективности ловли на кручение удочки и т.д. Маятниковая машина для испытания на удар использует кодировщик для расчета удара при изменении угла поворота.
2. Измерение длины
Счетчик метров использует окружность ролика для измерения длины и расстояния до объекта.
Датчик смещения кабеля измеряет длину объекта по окружности намоточного колеса.
Прямое измерение сцепления, сцепление с главным валом силового устройства, приводящего линейное перемещение, и измерение по количеству выходных импульсов.
При обнаружении среды информация о линейном перемещении передается на прямую рейку, звездочку вращающейся цепи и зубчатое колесо синхронного ремня.
3. Измерение скорости
Скорость линии, измерьте скорость линии производственной линии, подключившись к счетчику
Угловая скорость, измерение скорости двигателей, валов и т. Д. С помощью энкодеров
4. Измерение положения
Для станков запомните положение каждой координатной точки станка, например, сверлильного станка и т. Д.
Что касается автоматического управления, управляйте назначенным действием на пастырской позиции. Такие как лифты, подъемники и т. Д.
5. Синхронное управление
Синхронно управляйте передаточными звеньями с помощью угловой или линейной скорости для достижения контроля натяжения
3. Инкрементальный энкодер (поворотного типа)
1. Принцип работы:
Диск с фотоэлектрическим кодом с осью в центре, на которой нанесены круглые и темные гравированные линии, считывается фотоэлектрическим передатчиком и приемником и получает четыре группы синусоидальных сигналов, объединенных в A, B, C, D, каждая синусоида. Разность фаз в 90 градусов (360 градусов относительно цикла), сигналы C и D меняются местами и накладываются на фазы A и B для усиления стабильного сигнала; кроме того, импульс фазы Z выводится каждый оборот, чтобы представлять нулевое задание. Немного.
Поскольку фазы A и B отличаются на 90 градусов, о прямом и обратном вращении энкодера можно судить, сравнивая фазу A или фазу B. Нулевое исходное положение энкодера может быть получено с помощью нулевого импульса.
Материалы кодового диска кодировщика: стекло, металл, пластик. Стеклянный кодовый диск нанесен на стекло очень тонкими линиями разметки, что обеспечивает хорошую термостойкость и высокую точность. На металлическом кодовом диске нанесена прямая гравировка со сквозными непроходимыми линиями и он не хрупкий. Однако из-за определенной толщины металла точность ограничена, а его термостойкость на порядок хуже, чем у стекла. Пластиковые кодовые диски экономичны, их стоимость невысока, но точность, термическая стабильность и срок службы хуже. .
Разрешение — количество открытых или темных гравированных линий, обеспечиваемых кодировщиком на 360 градусов вращения, называется разрешением, также называемым индексированием разрешения, или напрямую называется количеством строк, обычно от 5 до 10 000 строк на оборот.
2. Выходной сигнал:
Выходной сигнал имеет синусоидальную форму (ток или напряжение), прямоугольную форму (TTL, HTL), открытый коллектор (PNP, NPN), двухтактные множественные формы, из которых TTL представляет собой дифференциальный привод с длинной линией (симметричный A, A-; B, B -; Z, Z-) HTL также называют двухтактным и двухтактным выходом. Интерфейс устройства приема сигнала энкодера должен соответствовать энкодеру.
Подключение сигнала — импульсный сигнал энкодера обычно подключается к счетчику, ПЛК и компьютеру. Модули, подключенные к ПЛК и компьютеру, делятся на низкоскоростные модули и высокоскоростные модули, а частота переключения низкая или высокая.
Например, однофазное соединение, используемое для подсчета в одном направлении и измерения скорости в одном направлении.
A. Двухфазное соединение, используемое для прямого и обратного счета, определения прямого и обратного хода и измерения скорости.
Трехфазное соединение A, B, Z, используется для измерения положения с коррекцией исходного положения.
Соединения A, A, B, B, Z, Z из-за соединения с симметричными отрицательными сигналами, электромагнитное поле, вносимое током в кабель, равно 0, затухание наименьшее, защита от помех наилучшая, и его можно передавать на большие расстояния.
Для кодировщиков TTL с симметричным отрицательным выходным сигналом расстояние передачи сигнала может достигать 150 метров.
Для кодировщиков HTL с симметричным выходом отрицательного сигнала расстояние передачи сигнала может достигать 300 метров.
3. Проблемы с инкрементальными энкодерами:
Инкрементальные энкодеры имеют нулевые кумулятивные ошибки и плохую защиту от помех. Приемное оборудование должно быть выключено и запомнено при выключении, а изменение или исходное положение должно быть обнаружено при запуске. Эти проблемы могут быть решены с помощью абсолютного энкодера.
Общее применение инкрементального энкодера:
Измерение скорости, измерение направления вращения, измерение угла движения, расстояния (относительного).
4. Абсолютный энкодер (поворотного типа)
На оптическом кодовом диске абсолютного кодера имеется множество линий с гравировкой оптических каналов, и каждая линия имеет порядок 2, 4, 8 и 16 линий. . . . . . Расположение, таким образом, в каждом положении энкодера, путем считывания открытого и темного участков каждой выгравированной линии, набора уникальных двоичных кодов от нулевой степени 2 до n-1 степени 2 (серый Code), который называется n-битным абсолютным кодировщиком. Такой кодировщик определяется механическим положением диска с фотоэлектрическим кодом, и на него не влияют сбой питания или помехи.
Каждое положение, определяемое механическим положением абсолютного энкодера, уникально. Его не нужно запоминать, не нужно искать опорную точку и не нужно вести подсчет. Когда ему нужно знать положение, когда читать его положение. Таким образом, характеристики защиты от помех кодера и надежность данных значительно улучшаются.
От однооборотного абсолютного энкодера до многооборотного абсолютного энкодера
Поверните однооборотный абсолютный энкодер, чтобы измерить каждую выгравированную линию диска с фотоэлектрическим кодом во время вращения, чтобы получить уникальный код.Когда поворот превышает 360 градусов, код возвращается в исходную точку, что не соответствует принципу уникальности абсолютного кода. Код может использоваться только для измерения в диапазоне вращения 360 градусов, который называется однооборотным абсолютным энкодером.
Если вы хотите измерить угол поворота свыше 360 градусов, вы должны использовать многооборотный абсолютный энкодер.
Производитель кодировщика использует принцип часового механизма. Когда центральное кодовое колесо вращается, другой набор кодовых дисков (или несколько наборов зубчатых колес, несколько наборов кодовых дисков) приводится в движение зубчатыми колесами, а количество оборотов добавляется к однооборотному кодированию. Кодирование, чтобы расширить диапазон измерения энкодера, такой абсолютный энкодер называется многооборотным абсолютным энкодером, он также определяется механической позицией кода, каждый код позиции уникален и не повторяется без необходимости запоминания.
Еще одним преимуществом многооборотного энкодера является то, что из-за большого диапазона измерения фактическое использование часто более богатое, поэтому нет необходимости находить точку изменения во время установки.Достаточно использовать определенное промежуточное положение в качестве отправной точки, что значительно упрощает сложность установки и отладки.
Подключение энкодера
Энкодер никогда не работает сам по себе. Он всегда подключается к устройству обработки сигналов, с помощью которого можно переварить и проанализировать импульсы на его выходах. Подключить энкодер легко – ведь это фактически датчик с транзисторными выходами. В простейшем случае, выход энкодера можно подключить ко входу счетчика, и запрограммировать его на измерение скорости или длины.
Но чаще всего выходные сигналы энкодера обрабатываются в контроллере. А далее путем расчетов можно получить информацию о скорости, направлении вращения, ускорении, положении объекта.
Энкодеры подключают не только к контроллеру. Он также может подключаться к преобразователю частоты, питающему электродвигатель. Таким образом , появляется возможность точного позиционирования, а также поддержания нужной скорости и момента вращения двигателя без использования контроллера. Это называется векторным управлением.
Основные параметры
Главный параметр любого энкодера – разрешение, то есть количество импульсов (для абсолютного преобразователя – разрядность, или количество бит) на один оборот. Довольно часто используются преобразователи с разрешением 1024 импульса на оборот.
Прочие параметры:
- напряжение питания – от 5 до 24 В
- тип вала – сплошной, полый, без вала (сквозное отверстие)
- диаметр вала или отверстия
- тип выхода – как правило, транзисторный выход с открытым коллектором
- также учитываются размер корпуса, тип крепления и степень защиты
Также учитываются размер корпуса, тип крепления и степень защиты.
Сигналы и выходы инкрементального энкодера
В принципе, простейший энкодер, кроме проводов питания, может иметь один дискретный выход, импульсы на котором будут однозначно говорить о скорости вращения вала, на котором он закреплён:
Импульсы на выходе энкодера – один канал
Период Т – величина, обратная частоте, а про частоту мы говорили выше. Уровень “Н” – это напряжение, почти равное напряжению питания (обычно 5, 12, или 24 В). Уровень “L” – около нуля.
Само собой, реальные импульсы не столь идеальны – у них может гулять скважность и будут завалены фронты.
Что может рассказать нам такой энкодер? Только о скорости и погонных метрах. Например, его можно применять для определения частоты вращения двигателя, или длины материала после нажатия кнопки “Сброс”. Неплохо, но хочется большего!
Если будет два выхода, импульсы на которых (оптическим способом) сдвинуты на четверть периода, мы сможем узнать направление вращения:
Импульсы каналов А и В с фазовым сдвигом
Такие выходы со сдвигом фаз на четверть периода называются квадратурными каналами. Этот приём широко применяется в радиотехнике и электронике не только для определения направления вращения, но и для определения знака рассогласования частот (больше или меньше опорной частоты?).
Если сдвиг фаз положительный (фаза В отстает), можно условиться о прямом вращении. Если отрицательный (фаза В опережает фазу А на четверть), значит, вращение в обратном направлении. Два этих сигнала с одной частотой и фазой ±90° подаются на триггер, выход которого однозначно указывает о направлении вращения.
Ничего это не напоминает? В энкодере – двухфазная система, со сдвигом фаз 90°, в электрощите – трехфазная система, со сдвигом фаз 120°. Для смены направления вращения трехфазного двигателя достаточно поменять местами любые две фазы.
Со скоростью, расстоянием и направлением разобрались, а что делать, если нужно узнать угол поворота? Для этого вводится сигнал “Z” (Zero) – опорный импульс, который также называют нуль-меткой или референсной меткой:
Выходы энкодера А, В с нулевой меткой Z
Импульс “Z” имеет длительность Т (бывает и другая длительность – T/2, или 2Т) и проскакивает 1 раз за оборот вала энкодера. Иными словами, длительность нулевой метки может быть в тысячи раз короче периода вращения вала энкодера.
Как и у индуктивных датчиков, выходы энкодера транзисторные, и могут быть нескольких типов. Читайте статью про подключение транзисторных оптических и индуктивных датчиков.
В современных датчиках каждая фаза (канал) обычно имеет ещё один, противофазный выход.
С теорией заканчиваем, плавно переходим к практике.
Применяемые технологии – магнитная и оптическая
Сегодня энкодеры работают, как правило, на основании двух технологий – оптической и магнитной.
Так, в приспособлениях оптического типа в качестве первичных датчиков сигналов выступают оптические диски, описанные выше. Число зачерненных и прозрачных отметок, расположенных на диске, будет определять и степень разрешения.
Но в последнее время популярность начинают приобретать энкодеры магнитного типа. В них сигналы положения вала двигателя формируются специальным датчиком. При этом открываются новые технологические возможности, к примеру, программируемое число импульсов за один оборот.
Монтаж энкодеров
По монтажу сразу скажу главное – вал энкодера по отношению к валу механизма должен быть надежно зафиксирован! Обычно это делается при помощи шестигранных винтов.
Бывали случаи, когда из-за проскальзывания самодельных и даже штатных муфт глючили производственные линии, и мы долго не могли найти причину – ведь всё остается исправным!
Монтироваться энкодер может и на валу двигателя, и на валу любого другого механизма – это не принципиально, и зависит лишь от конструкции и требований к точности выполнения поставленной задачи.
Вал энкодера никогда не будет соосным с вращающимся валом (вспомните, для чего нужен карданный вал). Поэтому используются специальные заводские переходные муфты, нужно надежно их крепить и периодически проверять качество монтажа.
Энкодер механически соединен с приводом через соединительную муфту для компенсации несоосности
Корпус любого энкодера всегда неподвижен. Вращается только его внутренняя подвижная часть.
Существуют энкодеры с полым валом, которые надеваются непосредственно на измеряемый вал и там фиксируются. Там даже нет такого понятия, как несоосность. Их гораздо проще монтировать, и они надежнее в эксплуатации. Чтобы энкодер при этом не прокручивался, используется лишь металлический поводок. На фото ниже показан энкодер с полым валом (обозначен В21.1), надетый на вал редуктора:
Энкодер с полым валом, надет на вал редуктора
Обратите внимание – корпус энкодера целиком и полностью держится на валу редуктора. От проворачивания его держит металлический поводок. При работе энкодер обычно немного покачивается по овальной траектории, это нормально, поскольку идеал существует только на картинках в даташитах и учебниках.
Бывают сквозные полые валы, когда ось механизма проходит через энкодер насквозь.
Чем привлекательны данные виды энкодеров
Энкодирующие устройства неспроста получили столь обширное распространение при конструировании большого спектра устройств. Они довольно дешевы и просты в монтаже.
Чтобы выбрать верный вариант для успешного внедрения в те или иные управленческие схемы, потребуется определиться:
- Насколько точно требуется проводить измерения. Об этом будет говорить число обрабатываемых импульсов за каждый оборот энкодирующего вала.
- Толщина вала, а также его модельная разновидность. Это влечет за собой необходимость в правильном подборе дополнительного оборудования, такого, как муфты, фланцы и т.д.
- Определиться с необходимой длиной кабеля, его поперечным сечением, а также с типом разъемов на выходе.
- Потребуется принять во внимание величину рабочего напряжения и прочие электрические характеристики.
- Осуществление связи энкодирующего оборудования с остальными элементами системы. Нужно будет уметь его программировать, обеспечивать параметры цикличности осуществления передачи результата замеров с частотностью опроса на входе используемых контроллеров, либо предусмотреть работу в стандартном интерфейсе.
Подключение и работа энкодеров. Реальные примеры.
Ниже я рассмотрю несколько примеров использования энкодеров в реальном оборудовании.
Измерение скорости полотна
В данном примере, инкрементальный энкодер ELCO используется для измерения скорости бумажного полотна при производстве бумаги. Энкодер закреплен на бумаговедущем валу через муфту, скорость вращения которого однозначно говорит о скорости бумаги.
При помощи системы «энкодер+контроллер» можно вычислить мгновенную скорость, а также погонную длину произведенной продукции.
Энкодер работает на бумаговедущем валу
или другой ракурс:
Энкодер ELCO работает на бумаговедущем валу. Корпус энкодера закреплен жестко, стыковка валов – через компенсирующую муфту
Минус такой установки – при механической поломке вала (а это бывало уже не раз, изнашиваются подшипники) ломается либо муфта, либо сам энкодер.
Положение деталей на конвейере
В этом случае энкодер насажен на вал двигателя, подключенного через преобразователь частоты. Двигатель через редуктор передает движение на конвейер, по которому движутся заготовки деталей.
Положение детали на конвейере, позиционирование при помощи энкодера на двигателе
С помощью энкодера и оптических датчиков, фиксирующих просвет между образцами продукции, контроллер с большой точность может управлять обработкой деталей.
При этом направление знать не обязательно (оно всегда одно), и могут применяться энкодеры без ноль-метки:
Энкодер для определения только скорости вращения
По моему мнению, насаживание энкодера на вал двигателя – не очень хорошая идея в смысле того, что энкодер крутится на больших оборотах (до 3000 об/мин). Кроме повышенного механического износа, необходимо предусмотреть обработку сигналов со сравнительно высокой скоростью. Но сегодня, с развитием промышленной электроники, это не проблема.
Крепление энкодера на валу двигателя позволяет очень точно контролировать скорость привода. С появлением высокооборотистых энкодеров многие производители наладили выпуск двигателей со встроенным энкодером.
Если интересно применение ПЧ в конвейерах, вот моя статья на Дзене, где я подробно рассматриваю схему включения ПЧ для конвейера.
Ещё пример точного позиционирования при помощи энкодера для двигателя:
Энкодер – работа на валу двигателя со стороны крыльчатки
В этом случае двигатель приводит в действие цепную передачу лифта, подающего заготовку на обработку. Точность позиционирования лифта – порядка 1 мм, длина пути – более 2 м.
Перемещение детали
Ещё большую точность, чем в предыдущем случае, можно получить, если вал энкодера закрепить на ходовой винт с резьбой.
На фото сверху вниз – направляющая, ходовой винт, кабель к энкодеру
Если на ходовой винт закрепить гайку, которая механически скреплена с перемещаемой деталью (в реальном примере это – металлическая заготовка, которая рубится или гнётся по нужному размеру), то с помощью энкодера можно до долей миллиметра узнать её положение. Точность вычисления будет зависеть от шага резьбы и разрешающей способности энкодера.
Минус такого решения – при большой скорости возможен «промах», и нужно либо уменьшать скорость при приближении к цели, либо постоянно двигаться на низкой скорости. Кроме того, механика тоже должна быть точной, чтобы исключить любые люфты и перекосы.
Перемещение упора
Задача стоит в принципе такая же, как и в предыдущем случае. Но тут другой принцип перемещения – за счет зубчатой передачи:
Зубчатая передача перемещения каретки
Плюс данной реализации в том, что энкодер насажен непосредственно на зубчатое колесо, которое осуществляет передачу вращения. При большом разрешении энкодера и отсутствии механических люфтов можно добиться очень высокой точности позиционирования.
Использование энкодера совместно с винтовой и зубчатой передачей позволяет достичь высокой точности обработки деталей в станках с ЧПУ.
Вычисление точной координаты
В производстве полиграфической продукции иногда нужно нанести клей (или краску) в точное место. Когда печатная продукция (например, коробки или конверты) движутся по ленточному конвейеру, при помощи оптического датчика определяется начало коробки, затем контроллер при помощи энкодера вычисляет нужную координату, и включает подачу клея.
Вычисление точной координаты при помощи измерительного колеса
Формируется клеевая дорожка нужной длины, затем клей выключается. Далее коробка подается на фальцовочный узел, где складывается и склеивается. При этом скорость работы линии может достигать до 300 коробок в минуту.
Системы дозирования
Для точного открытия заслонки в системе дозирования жидкостей служит система, состоящая из двигателя с редуктором, на вал которого с одной стороны закреплена задвижка, с другой – энкодер.
Поворот на определенный угол при помощи энкодера
Поворот вала редуктора на угол не более 180° ограничен индуктивными датчиками приближения, а точное положение определяется по сигналу от энкодера. В исходном состоянии задвижка закрыта, и датчик минимального положения активен. Это состояние принимается за ноль. Далее включается двигатель, и вал поворачивается. Точный угол поворота пропорционален количеству импульсов от энкодера обратной связи. В данном случае энкодер не делает полный оборот, его движение ограничено датчиками.
Датчики активируются кулачками, которые закреплены (и могут корректироваться шаловливыми ручками)) на том же валу, что и энкодер.
При выключении питания положение энкодера (а значит, и задвижки) запоминается в памяти контроллера. В случае необходимости оператор может провести инициализацию (установку нулевого и максимального положения) за счет индуктивных датчиков. Опорная “Z” – метка при этом не используется.
Защита двигателя
Даже при перегрузке двигателя его скорость понижается, скольжение есть всегда, даже на холостом ходу. Но изменение тока при этом ничтожно. Особенно (например), если двигатель работает на застрявшую продукцию через редуктор.
Поэтому, очень удобно использовать энкодер, закрепленный на валу двигателя, для определения повышенного скольжения. А значит – перегрузки двигателя.
У меня на Дзене есть статья, как энкодер защищает двигатель от перегрузки, там тема раскрыта подробнее.
Вот фото оттуда:
Энкодер, механическая поломка из-за смещения двигателя
Энкодер перестал выдавать импульсы (перегрузки, правда, не было), и тут же контроллер выдал сообщение:
Сообщение на экране оператора о поломке энкодера
Запоминающие энкодеры
Энкодеры умнеют на глазах. В американской линии довелось иметь дело с серводвигателем, в состав которого входит энкодер с памятью.
Энкодер в составе серводвигателя с памятью
Энкодер не простой – у него в памяти зашиты параметры серводвигателя (их более сотни), которые он каждый раз при включении питания передает к центральный контроллер. Из-за заводского брака энкодер был плохо закреплён, и начал тереться о корпус двигателя, что привело к нарушению синфазности вращения двигателя и энкодера. Американцы дистанционно заново программировали этот энкодер, чтобы можно было запустить линию. Но это уже совсем другая история…
Применение энкодера
Области применений сегодня настолько обширны, что преобразователь перемещений можно встретить в принтере, метро, самолете, трамвае, строительном кране, лифте, даже на продвинутом дачном участке в качестве датчика открывания ворот. Ниже представлен далеко не полный список применений, где датчики обратной связи получили наибольшее распространение:
- Автоматизация производств
- Упаковка
- Текстильное производство
- Производство продуктов питания и напитков
- Промышленные роботы
- Медицинская техника
- Томографы
- Роботы-хирурги
- Строительная и карьерная техника
- Передвижные буровые станции
- Карьерные самосвалы
- Передвижные краны
- Промышленные задвижки и регулирование уровня воды
- Радиальные и барабанные ворота
- Вертикальные шлюзы
- Автоматические трубопроводные задвижки
- Лифты
- Пассажирские
- Грузовые
- Специализированные подъемники
- Хранение и перемещение грузов
- Автоматизированные склады
- Автопогрузчики
- Портовые краны
- Багажные ленты
- Ножничные подъемники
- Альтернативная энергетика
- Ветряные генераторы
- Солнечные батареи
- Станкостроение и модернизация станков
- Универсальные станки
- Станки с ЧПУ
- Сервомоторы
Популярные категории:
- Оборудование
Все категории
Резольвер
Совсем коротко о резольвере. По сути он выполняет те же функции, что и энкодер – может вычислять скорость и направление вращения двигателя. Но резольвер – аналоговый измерительный прибор. В некоторых случаях он гораздо точнее говорит об угле поворота, поскольку фактически речь идет о вычислении сдвига фаз на его выходах.
Реальный японский резольвер SMARTSYN TAMAGAWA SEIKI MODEL: TS2651N141E78, довелось когда-то ремонтировать:
Устройство резольвера
Разновидности
Различаются следующие виды » target=»_blank»>энкодеров:
- абсолютного типа;
- инкрементального типа.
Абсолютная модель выдает уникальные цифровые коды относительно отдельно взятого расположения вала, потому становится возможным определять углы поворота даже после того, как было отключено электропитание.
Энкодеры инкрементального вида выдают импульсный цифровой код для каждого отдельно взятого положения вала электромотора. Такие устройства позволяют определять, с какой скоростью вращается вал во время отключения электропитания в том случае, когда нет необходимости сохранять информацию об абсолютном угловом положении.
Иначе говоря, в то время, когда вал не движется, импульс не поступает. Следовательно, когда он снова приходит в движение, датчики будут вести отсчеты его угловых параметров с исходной позиции.
Тахогенератор
Не путайте энкодер и тахогенератор (его иногда ошибочно называют тахометром)!
У них схожие функции и область применения, но у тахо от скорости вращения двигателя зависит не частота выходных импульсов, а выходное напряжение.
Посмотрите, какая конструкция установлена у нас на заводе на двигателе постоянного тока мощностью 200 кВт:
Энкодер + тахометр слиты в единое целое на валу двигателя
Тахогенераторы, как и двигатели постоянного тока, в современном оборудовании практически не используются.
Содержание:
- Применяемые технологии
- Выходной сигнал
- Основные параметры
- Когда применяют инкрементальные энкодеры
- Области применения
Инкрементальные энкодеры, в отличие от абсолютных, выдают информацию о положении относительно положения в предыдущий момент времени. После включения питания вся информация о предыдущих перемещениях пропадает и положение вала становится неопределённым. Как правило в таком случае механизм приходится перемещать в некоторое известное положение для того чтобы информация о положении снова стала актуальной.
Производители энкодеров
Среди российских производителей энкодеров мне известен лишь только Питерский СКБ ИС, который производит энкодеры марки ЛИР. К сожалению, российского промышленного оборудования сейчас почти не производится, и ЛИРы применяются лишь в военном и лабораторном оборудовании.
Читайте на Дзене моё мнение (2 статьи) по импортозамещению электротехнической продукции.
По этой причине я имею дело только с энкодерами зарубежного производства. Производителей энкодеров много – их производят почти все производители полупроводниковых датчиков. Чаще всего я встречаюсь с энкодерами Autonics – как и в случае с датчиками, в России представлен большой ассортимент. Другие известные мне производители энкодеров – немецкий Sick, японский Omron, и несколько китайских брендов.
Использование тех или иных марок энкодеров обусловлено часто не техническими причинами, поскольку их параметры, схемы подключения и надежность практически идентичны. Тут скорее политические мотивы – производители комплектующих любыми путями стараются, чтобы их продукция вошла в состав больших и массовых производственных линий, чтобы таким образом закрепиться на рынке.
Виды пошаговых энкодеров и их особенности
Кроме предложенной выше классификации, инкрементальные энкодирующие устройства можно поделить согласно типу информации для считывания.
Одиночные нужны для простого подсчета числа импульсов.
Преимущества:
- максимальная простота в конструкции и использовании;
Недостатки:
- во время запуска непонятно, в каком именно положении находится;
- велика вероятность ошибок во время подсчета импульсов из-за ложного срабатывания;
- нельзя определить направленность движения.
Квадратурные, они же двойные, энкодеры позволяют считывать не только число поступаемых импульсов, но и направление движения.
Преимущества:
- простота конструкции;
- практически отсутствуют ошибки во время счета импульсов;
- можно определять направленность движения.
Недостатки:
- во время запуска непонятно, в каком именно положении находится энкодер.
Энкодирующие устройства, построенные на двоичном коде, позволяют определять точное положение устройства в тот или иной момент.
Преимущества:
- инициализация происходит без ошибок;
- нет необходимости в считывании импульсов;
- можно определять направленность движения.
Недостатки:
- из-за наличия нескольких датчиков аппарат несколько сложнее;
- возникновение проблем с граничным положением в случае использования более одного бита;
- разрешающая способность несколько ограничена.
Энкодирующие устройства, основанные на так называемом коде Грэя, дают возможность определять положение в данный момент.
Преимущества:
- безошибочная инициализация и подсчет импульсов;
- можно определять, в каком направлении происходит вращение;
- можно использовать более одного бита без риска возникновения ошибок на граничном положении.
Недостатки:
- относительно сложны в использовании;
- присутствует определенное ограничение по разрешению.
Скачать
Статья, которую вы сейчас прочитали, недавно была в урезанном виде опубликована в бумажном журнале “Электротехнический рынок” под названием “Энкодер: мастхэв производственной линии”. Кому интересно, выкладываю для скачивания:
• Энкодер: мастхэв производственной линии / Статья в журнале «Электротехнический рынок» от СамЭлектрик.ру. Разновидности и примеры реального применения энкодеров. Приведены описания реальных узлов оборудования, в которых применяются энкодеры, pdf, 1.15 MB, скачан: 917 раз./
Рекомендую скачать ещё одну интересную статью по энкодерам:
• Подключение инкрементного энкодера к ПЛК / Обобщены данные о типах выходного сигнала энкодера, способах его обработки, подсчёте измеряемой частоты вращения. Пример подключения и обработки сигналов энкодера в контроллере Siemens, pdf, 2.36 MB, скачан: 882 раз./
Приглашаю коллег к обсуждению в комментариях, буду рад замечаниям и дополнениям к статье!
Материалы
Для реализации проекта понадобится печатная плата с оптическим датчиком, Arduino (я применил тут Arduino Uno), а так же — диск энкодера.
Плата с оптическим датчиком
Схема Arduino Uno
Диск энкодера
Сравнение энкодеров
- Оптические энкодеры предлагают высокое разрешение и являются наиболее точными. Они невосприимчивы к электромагнитным помехам, но подвержены загрязнению.
- Магнитные энкодеры компактны и дешевы. Они восприимчивы к электромагнитным помехам, если не экранированы должным образом. Разрешение хорошее. Точность зависит от производителя. Отношение сигнал / шум может снизить используемое разрешение.
- Емкостные энкодеры имеют низкую стоимость и не подвержены значительному воздействию грязи, пыли и электромагнитных помех. Точность хорошая.
- Абсолютные многооборотные энкодеры полезны, когда необходимо всегда отслеживать положение вала, даже когда в системе отключено питание.
Многооборотные энкодеры
Многооборотные энкодеры полезны для отслеживания положения вала при выключенном контроллере или электроприводе. Например, если предприятие или технические специалисты не хотят возвращать систему в исходное состояние при каждом включении, необходимы абсолютные многооборотные энкодеры. (Если необходимо отслеживать положение только при включенном драйвере, драйвер отслеживает положение, и абсолютный многооборотный энкодер не нужен.)
Есть три распространенных типа:
Многооборотные энкодеры с питанием от батареи используют батарею, чтобы поддерживать в рабочем состоянии необходимые электрические схемы во время отключения питания для отслеживания положение энкодера через несколько оборотов. Обратной стороной является то, что информация о местоположении будет потеряна, когда батарея разрядится. Резервный аккумулятор может значительно увеличить габариты датчика положения.
Энкодеры с редуктором используют вторичный энкодер, который перемещается на один или несколько отсчетов каждый раз, когда первичный энкодер совершает один оборот. Энкодеры с редуктором не требуют батареи, но являются сложными и дорогостоящими, а шестерни могут со временем изнашиваться.
Энкодеры с накоплением энергии Wiegand используют эффект Виганда, чтобы генерировать электрический импульс каждый раз, когда датчик завершает оборот. Эта энергия постоянна независимо от того, насколько медленно вал вращается, когда он проходит магнитный переход, поэтому этот импульс можно надежно использовать для питания небольшой цепи и подсчета оборотов.
В датчиках положения на основе эффекта Виганда используется первичный магнитный энкодер, обеспечивающий 131072 отсчета на оборот (также называемый 17-битным, потому что 217 = 131 072). Счетчик оборотов — 16 бит, поэтому он может отслеживать 216 = 65 536 оборотов вала. Точность ± 0,1 град.
Интерфейс для энкодеров Weigand часто BISS-C. Некоторые микроконтроллеры имеют собственный интерфейс BISS-C, поэтому для преобразования сигнала используется внешнее устройство FPGA.
Энкодеры широко используются в приложениях управления движением с обратной связью. Выбор лучшего датчика положения для вашего приложения требует опыта, который часто можно найти у поставщиков.