Типы электродвигателей По виду питающего тока Синхронные электродвигатели Асинхронные электродвигатели Вентильные электродвигатели Расчет мощности Расчет пускового тока Режимы работы Климатическое исполнение Энергоэффективность
Электродвигатель – механизм, преобразующий энергию электрического тока в кинетическую энергию. Современное производство и быт сложно представить без машин с электроприводом. Они используются в насосном оборудовании, системах вентиляции и кондиционирования, в электротранспорте, промышленных станках различных типов и т.д.
При выборе электродвигателя необходимо руководствоваться несколькими основными критериями:
- вид электрического тока, питающего оборудование;
- мощность электродвигателя;
- режим работы;
- климатические условия и другие внешние факторы.
Электродвигатели постоянного и переменного тока
В зависимости от используемого электрического тока двигатели делятся на две группы:
- приводы постоянного тока;
- приводы переменного тока.
Электродвигатели постоянного тока сегодня применяются не так часто, как раньше. Их практически вытеснили асинхронные двигатели с короткозамкнутым ротором.
Главный недостаток электродвигателей постоянного тока – возможность эксплуатации исключительно при наличии источника постоянного тока или преобразователя переменного напряжения в постоянный ток. В современном промышленном производстве обеспечение данного условия требует дополнительных финансовых затрат.
Тем не менее, при существенных недостатках этот тип двигателей отличается высоким пусковым моментом и стабильной работой в условиях больших перегрузок. Приводы данного типа чаще всего применяются в металлургии и станкостроении, устанавливаются на электротранспорт.
Принцип работы электродвигателей переменного тока построен на электромагнитной индукции, возникающей в процессе движения проводящей среды в магнитном поле. Для создания магнитного поля используются обмотки, обтекаемые токами, либо постоянные магниты.
Электродвигатели переменного тока подразделяются на синхронные и асинхронные. У каждой подгруппы есть свои конструктивные и эксплуатационные особенности.
Виды двигателя
На сегодняшний день на рынке электродвигателей доступно несколько основных видов устройств:
1. Привод постоянного тока.
Является одним из самых распространенных типов. Данная система применяется в металлургической промышленности и транспорте, однако модели постепенно вытесняются асинхронными устройствами.
Дело в том, что у такого аппарата существуют недостатки – возможность применения, только в том случае, если имеется определенная мощность тока, не изменяющаяся во время работы. Для обеспечения таких условий функционирования, требуется совершать дополнительные финансовые вложения.
Но есть и преимущества — этот вид системы гарантирует бесперебойную работу даже при чрезмерных нагрузках.
2. Приводы переменного тока.
Это изделия, которые можно разделить на два типа: синхронные и асинхронные. Каждый из этих видов имеет индивидуальные особенности и характеристики, которым также стоит уделить внимание:
- Синхронные устройства
в основном используются в устройствах, которые имеют стабильную рабочую скорость (генераторы, насосы). Данный вид системы обладает высоким КПД. Используя синхронные электродвигатели можно минимизировать потребление электроэнергии. Мощность системы может достигать показателя в 10 000 кВт, похвастаться которым смогут не многие. - Асинхронные двигатели
– уникальные устройства. Их особенность заключается в высоких показателях вращения магнитного поля, особенно при сравнении с другими аппаратами. Работает оборудование при помощи переменного тока, который образуется благодаря индукции, возникающей во время передвижения проводниковой среды в магнитном поле. Для того чтобы это происходило, специалисты используют обмотку, которая обтекается токами.
3. Вентильные устройства.
Этот вид включает в себя аппараты, в которых для регулировки режима использования, следует применять специальные вентили. Такие агрегаты обладают целым рядом достоинств:
- безопасность использования;
- легкость эксплуатации;
- отсутствие необходимости в дополнительном уходе;
- высокий уровень исполнения;
- возможность регулировать скорость вращения по своему усмотрению.
Синхронные электродвигатели
Синхронные двигатели – оптимальное решение для оборудования с постоянной скоростью работы: генераторов постоянного тока, компрессоров, насосов и др.
Технические характеристики синхронных электродвигателей разных моделей отличаются. Скорость вращения колеблется в диапазоне от 125 до 1000 оборотов/мин, мощность может достигать 10 тысяч кВт.
В конструкции приводов предусмотрена короткозамкнутая обмотка на роторе. Ее наличие позволяет осуществлять асинхронный пуск двигателя. К преимуществам оборудования данного типа относятся высокий КПД и небольшие габариты. Эксплуатация синхронных электродвигателей позволяет сократить потери электричества в сети до минимума.
Асинхронные электродвигатели
Асинхронные электродвигатели переменного тока получили наибольшее распространение в промышленном производстве. Особенностью данных приводов является более высокая частота вращения магнитного поля по сравнению со скоростью вращения ротора.
В современных двигателях для изготовления ротора используется алюминий. Легкий вес этого материала позволяет уменьшить массу электродвигателя, сократить себестоимость его производства.
КПД асинхронного двигателя падает почти вдвое при эксплуатации в режиме низких нагрузок – до 30-50 процентов от номинального показателя. Еще один недостаток таких электроприводов состоит в том, что параметры пускового тока почти втрое превышают рабочие показатели. Для уменьшения пускового тока асинхронного двигателя используются частотные преобразователи или устройства плавного пуска.
Асинхронные электродвигатели удовлетворяют требованиям разных промышленных применений:
- Для лифтов и другого оборудования, требующего ступенчатого изменения скорости, выпускаются многоскоростные асинхронные приводы.
- При эксплуатации лебедок и металлообрабатывающих станков используются электродвигатели с электромагнитной тормозной системой. Это обусловлено необходимостью остановки привода и фиксации вала при перебоях напряжения или его исчезновения.
- В процессах с пульсирующей нагрузкой или при повторно-кратковременных режимах могут использоваться асинхронные электродвигатели с повышенными параметрами скольжения.
Знание особенностей изделия и электродвигателя
Производители предлагают широкий ассортимент электродвигателей для промышленных применений. Шаговые электродвигатели, серводвигатели, электродвигатели переменного и постоянного тока пригодны для использования в большинстве типов изделий промышленной автоматики, но оптимальный выбор электродвигателя зависит от характера изделия. Пользователям следует выбирать электродвигатель для своего изделия, учитывая, какой требуется режим работы — постоянная частота вращения, переменная частота вращения или управление положением ротора, — и в тесном взаимодействии с поставщиками электродвигателя и привода.
Вентильные электродвигатели
Группа вентильных электродвигателей включает в себя приводы, в которых регулирование режима эксплуатации осуществляется посредством вентильных преобразователей.
К преимуществам данного оборудования относятся:
- Высокий эксплуатационный ресурс.
- Простота обслуживания за счет бесконтактного управления.
- Высокая перегрузочная способность, которая в пять раз превышает пусковой момент.
- Широкий диапазон регулирования частоты вращения, который почти вдвое выше диапазона асинхронных электродвигателей.
- Высокий КПД при любой нагрузке – более 90 процентов.
- Небольшие габариты.
- Быстрая окупаемость.
Мощность электродвигателя
В режиме постоянной или незначительно изменяющейся нагрузки работает большое количество механизмов: вентиляторы, компрессоры, насосы, другая техника. При выборе электродвигателя необходимо ориентироваться на потребляемую оборудованием мощность.
Определить мощность можно расчетным путем, используя формулы и коэффициенты, приведенные ниже.
Мощность на валу электродвигателя определяется по следующей формуле:
где: Рм – потребляемая механизмом мощность; ηп – КПД передачи.
Номинальную мощность электродвигателя желательно выбирать больше расчетного значения.
Формула расчета мощности электродвигателя для насоса
где: K3 – коэффициента запаса, он равен 1,1-1,3; g –ускорение свободного падения; Q – производительность насоса; H – высота подъема (расчетная); Y – плотность перекачиваемой насосом жидкости; ηнас – КПД насоса; ηп – КПД передачи.
Давление насоса рассчитывается по формуле:
Формула расчета мощности электродвигателя для компрессора
Мощность поршневого компрессора легко рассчитать по следующей формуле:
где: Q – производительность компрессора; ηk – индикаторный КПД поршневого компрессора (0,6-0,8); ηп – КПД передачи (0,9-0,95); K3 – коэффициент запаса (1,05 -1,15).
Значение A можно рассчитать по формуле:
или взять из таблицы
| p2, 105Па | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| A, 10-3 Дж/м³ | 132 | 164 | 190 | 213 | 230 | 245 | 260 | 272 |
Формула расчета мощности электродвигателя для вентиляторов
где: K3 – коэффициент запаса. Его значения зависят от мощности двигателя:
- до 1 кВт – коэффициент 2;
- от 1 до 2 кВт – коэффициент 1,5;
- 5 и более кВт – коэффициент 1,1-1,2.
Q – производительность вентилятора; H – давление на выходе; ηв – КПД вентилятора; ηп – КПД передачи.
Приведенная формула используется для расчета мощности осевых и центробежных вентиляторов. КПД центробежных моделей равен 0,4-0,7, а осевых вентиляторов – 0,5-0,85.
Остальные технические характеристики, необходимые для расчета мощности двигателя, можно найти в каталогах для каждого типа механизмов.
ВАЖНО! При выборе электродвигателя запас мощности должен быть, но небольшой. При значительном запасе мощности снижается КПД привода. В электродвигателях переменного тока это приводит еще и к снижению коэффициента мощности.
Правильный выбор мощности двигателя для привода должен удовлетворять требованиям экономичности, производительности и надежности рабочей машины. Установка двигателя большей мощности, чем это необходимо по условиям привода, вызывает излишние потери энергии при работе машины, обусловливает дополнительные капитальные вложения и увеличение габаритов двигателя. Установка двигателя недостаточной мощности снижает производительность рабочей машины и делает ее работу ненадежной, а сам двигатель в подобных условиях легко может быть поврежден.
Двигатель должен быть выбран так, чтобы его мощность использовалась возможно полнее. Во время работы двигатель должен нагреваться примерно до предельно допустимой температуры, но не выше ее. Кроме того, двигатель должен нормально работать при возможных временных перегрузках и развивать пусковой момент, требуемый для данной рабочей машины.
В соответствии с этим мощность двигателя выбирается в большинстве случаев на основании условий нагрева (выбор мощности по нагреву), а затем производится проверка соответствия перегрузочной способности двигателя условиям пускав машины и временным перегрузкам. Иногда (при большой кратковременной перегрузке) приходится выбирать двигатель по требуемой максимальной мощности. В подобных условиях длительная мощность двигателя часто полностью не используется.
А. Выбор мощности двигателя для привода с продолжительным режимом работы. При постоянной или мало изменяющейся нагрузке на валу мощность двигателя должна быть равна мощности нагрузки. Проверки на нагрев и перегрузку во время работы не нужны. Однако необходимо проверить, достаточен ли пусковой момент двигателя для пусковых условий данной машины.
Мощность продолжительной нагрузки ряда хорошо изученных механизмов определяется на основании проверенных практикой теоретических расчетов.
Например, мощность двигателя (кВт) для вентилятора:
(1)
где V — количество нагнетаемого или всасываемого воздуха, м3/с;
∆р — перепад, Па;
ηвен – коэффициент полезного действия (КПД) вентилятора (у крыльчатых вентиляторов 0,2 — 0,35, у центробежных — до 0,8);
ηпер — КПД передачи от двигателя к вентилятору;
произведение V∆р представляет собой полезную мощность вентилятора, а 1000 — коэффициент для перевода мощности в киловатты.
Во многих случаях мощность двигателя приводов с продолжительным режимом работы рассчитывается по эмпирическим формулам, проверенным длительной практикой. Для малоизученных приводов продолжительной нагрузки мощность двигателя часто определяется на основании удельного расхода энергии при выпуске продукции или экспериментально путем испытания привода.
Б. Выбор мощности двигателя при кратковременном и повторно-кратковременных режимах работы. При кратковременном, повторно кратковременном и продолжительном с переменной нагрузкой режимах важно знать закон изменения во времени превышения температуры # двигателя над температурой окружающей среды.
Электрическая машина с точки зрения нагрева представляет собой весьма сложное тело. Тем не менее при расчетах, не требующих большой точности, можно считать электрическую машину однородным телом. Это дает возможность применить к ней упрощенное уравнение нагрева
(2)
где С — теплоемкость машины;
Н -ее теплоотдача;
Q0 — теплота, выделяющаяся в машине в единицу времени.
При t = 0 начальное превышение температуры ? = ?о, так что постоянная А = превышения температуры машины:
(3)
Таким образом, в данном случае, как и при ???? =????о, превышение температуры возрастает по экспоненциальному закону, стремясь к значению
Рисунок 1. Начальное превышение температуры
Начальное превышение температуры изменяет лишь скорость изменения температуры, но не характер процесса рисунок 1.
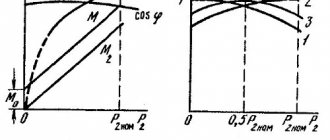
При различных значениях продолжительной нагрузки одной и той же машины зависимости ?(t) различаются лишь ординатами рисунок 2.
Рисунок 2. Температура при различных продолжительных нагрузках
Наибольшее допустимое для данной машины превышение температуры равно ?ном. Прямая ? = ?мом, параллельная оси абсцисс, пересекает в различных точках кривые ?(t), соответствующие различным значениям мощности нагрузки Ркэлектродвигателя. Абсцисса точки пересечения определяет тот промежуток времени tk, в течение которого мощность двигателя может быть временно равна мощности Рк, представляющей собой перегрузку по отношению к его номинальной мощности в продолжительном режиме. График нагрева приближающийся к ?ном, соответствует номинальной мощности двигателя Рном.
При нагрузках, меньших Рном, мощность двигателя полностью не используется. Однако если двигатель загружается на относительно короткое время, то, по существу, он тоже используется не полностью. Целесообразно его кратковременно перегрузить и чем меньше продолжительность работы, тем больше должна быть эта перегрузка. Предел повышения нагрузки двигателя по мере уменьшения продолжительности включения определяется мгновенной перегрузочной мощностью двигателя, зависящей от его электрических свойств (максимального момента у асинхронного двигателя, условий коммутации у машин постоянного тока и т. п.).
При повторно-кратковременном режиме двигатель попеременно то нагревается, то охлаждается. Изменение его температуры в течение времени каждого цикла зависит при этом от предыдущего теплового состояния. Зависимость нагрева и охлаждения машины от времени в подобных условиях показана на рис. 3. Конечное превышение температуры каждой данной части цикла равно начальному превышению температуры для последующей части цикла. Если во время той или иной части цикла наступает значительное изменение условий охлаждения (остановка двигателя или заметное изменение частоты вращения), то изменяется постоянная времени Т=С/Н нагрева двигателя, что должно быть учтено при построении графиков.
Рисунок 3. Зависимость нагрева и охлаждения машины от времени
Определение мощности двигателя по условиям нагрева посредством построения графиков нагрева требует значительной затраты времени и не дает точных результатов. Здесь эти построения приведены лишь для того, чтобы наглядно показать картину изменения нагрева двигателя при переменной нагрузке.
В большинстве случаев для выбора мощности двигателя применяются более простые методы, в частности метод эквивалентного тока. В основу этого метода положено допущение, что при переменной нагрузке двигателя его средние потери должны быть равны потерям при продолжительной (номинальной) нагрузке.
Нагревание двигателя, обусловленное потерями, в обоих случаях должно быть одинаковым. На этом основании определяем эквивалентный ток:
(4)
Зная эквивалентный ток, номинальное напряжение и номинальный коэффициент мощности, можно определить номинальную мощность двигателя:
(5)
Расчёт мощности трёхфазного электродвигателя производится по следующей формуле:
(6)
где: U-номинальное напряжение;
I — номинальный ток электродвигателя (берется из паспортных данных электродвигателя, а при их отсутствии определяется расчетным путем);
cosφ — коэффициент мощности — отношение активной мощности к полной (принимается от 0,75 до 0,9 в зависимости от мощности электродвигателя);
η — коэффициент полезного действия (КПД) — отношение электрической мощности, потребляемой электродвигателем из сети к механической мощности на валу двигателя (принимается от 0,7 до 0,85 в зависимости от мощности электродвигателя).
Полученный результат можно округлить до ближайшего стандартного значения мощности.
Стандартные значения мощностей электродвигателей: 0,25; 0,37; 0,55; 0,75; 1,1; 1,5; 2,2; 3,0; 4,0; 5,5; 7,5; 11; 15; 18,5; 22; 30; 37; 45; 55; 75 кВт и т.д.
При длительной неизменной нагрузке задача выбора вида двигателя (постоянного тока, асинхронного, синхронного) относительно проста. Для подобного привода, не требующего регулирования скорости, ПУЭ (Правила устройства электроустановок) рекомендуют независимо от мощности применять синхронные двигатели. Эта рекомендация объясняется тем, что современный синхронный двигатель пускается в ход так же, как асинхронный, а его габариты меньше и работа экономичнее, чем асинхронного двигателя той же мощности (выше cos????, больше максимальный момент).
Но если электродвигатель должен работать в условиях регулируемой частоты вращения, частых пусков, выбросов и сбросов нагрузки и т.п., то при выборе вида двигателя необходимо сопоставить условия привода, с особенностями механических характеристик различных видов электродвигателей. Принято различать естественную и искусственную механические характеристики двигателя. Естественная механическая характеристика соответствует номинальным условиям его включения, нормальной схеме соединений и отсутствию каких-либо добавочных элементов в цепях двигателя. Искусственные характеристики получаются при изменении напряжения на двигателе, включении добавочных элементов в цепи двигателя и соединении этих цепей по специальным схемам.
Важным критерием для оценки механических характеристик служит их жесткость.
Жесткость может быть различной для отдельных участков характеристики.
Требования к жесткости механической характеристики в ряде случаев служат основанием для выбора вида двигателя. Например, для подъемно-транспортных механизмов желательна мягкая характеристика, а для станов холодной прокатки стали нужна очень жесткая характеристика.
При частых пусках и непостоянной нагрузке наиболее надежным и простым в эксплуатации и вместе с тем дешевым является асинхронный двигатель с короткозамкнутым ротором. Двигатель с фазным ротором дороже, его обслуживание сложнее, габариты больше, a cos ? меньше (из-за большего воздушного зазора).
Преимущества фазного ротора в отношении пускового момента незначительны по сравнению с короткозамкнутым ротором, имеющим двойное беличье колесо. Поэтому двигатели с контактными кольцами устанавливаются лишь при наличии особых требований к пусковому моменту или к пусковому току. Таким образом, для мощностей до 100 кВт при нерегулируемом приводе наиболее распространен асинхронный короткозамкнутый двигатель. При больших мощностях, если невозможно применить короткозамкнутый асинхронный двигатель, устанавливается асинхронный двигатель с фазным ротором.
В настоящее время положение существенно изменилось благодаря внедрению силовых полупроводниковых преобразователей. Они дают возможность преобразовывать частоту переменного тока, что позволяет плавно и в широких пределах регулировать угловую скорость вращающегося магнитного поля, а следовательно, экономично и плавно регулировать частоту вращения асинхронных и синхронных двигателей. Двигатель постоянного тока стоит значительно дороже, требует большего ухода и изнашивается быстрее, чем двигатель переменного тока. Тем не менее в ряде случаев предпочтение отдается двигателю постоянного тока, позволяющему простыми средствами изменять частоту вращения электропривода в широких пределах (3: 1, 4 :1 и более).
В качестве примеров приводов, для которых рекомендуется постоянный ток, назовем следующие: в металлургической промышленности — реверсивные прокатные станы, регулируемые нереверсивные станы при многодвигательном приводе, вспомогательные механизмы повторнократковременного режима работы, доменные подъемники; в металлообрабатывающей промышленности — токарные специальные станки.
Конструкцию (тип) двигателя выбирают в зависимости от условий окружающей среды. Приходится учитывать необходимость защиты среды от возможных искрообразований в двигателе (при наличии горючей пыли, взрывоопасных смесей и т. п.), а также самих двигателей от попадания в них влаги, пыли, агрессивных химических веществ из окружающей среды.
Двигатель производственного агрегата должен наиболее полно отвечать технико-экономическим требованиям, т.е. отличаться простотой конструкции, надёжностью в эксплуатации, наименьшей стоимостью, небольшими габаритами и массой, обеспечивать простое управление, удовлетворять особенности технологического процесса и иметь высокие энергетические показатели при различных режимах работы.
В нерегулируемых приводах малой и средней мощности используют в большинстве случаев трёхфазные асинхронные двигатели с короткозамкнутым ротором, конструктивное исполнение которого согласуют с необходимыми пусковыми условиями производственного агрегата. Если эти двигатели не могут обеспечить условия пуска, применяют трёхфазные асинхронные двигатели с фазным ротором, благодаря которому можно не только получить увеличенный начальный пусковой момент, но и добиться его снижения до заданного значения. Для привода установок средней и большой мощности целесообразно использовать трёхфазные синхронные двигатели, которые отличаются от аналогичных трёхфазных асинхронных машине только более высоким коэффициентом полезного действия (КПД), но и допускающие регулирование коэффициента мощности с целью компенсации реактивной мощности всего оборудования.
В многоскоростных приводах, обеспечивающих ступенчатое регулирование скорости, применяют многоскоростные трёхфазные асинхронные двигатели с короткозамкнутым ротором, допускающие путём переключений в цепи обмотки статора получать две, три или четыре частоты вращения ротора.
В регулируемых приводах с плавным изменением скорости в небольшом диапазоне используют трёхфазные асинхронные двигатели с фазным ротором, а при широком диапазоне регулирования — двигатели постоянного тока с соответствующей системой возбуждения, определяющей жёсткость механической характеристики в соответствии с требованиями производственного агрегата.
Таким образом, род тока двигателя всецело определяется условиями технологического процесса, а напряжение выбирают в соответствии со стандартными напряжениями питающих сетей и учётом технических данных двигателей.
Например — трёхфазные асинхронные двигатели серии 4А при диапазоне номинальной мощности от 0,06 до 0,7 кВт изготовляют только на напряжение 220 или 380 В, при диапазоне от 0,55 до 11 кВт — на напряжения 220, 380 или 660 В, а при диапазоне от 15 до 110 кВт — на напряжения 220/380 или 380/660В.
Если же номинальная мощность двигателя находится в пределах от 132 до 400кВт, то такие двигатели изготовляют на напряжения 380/660В.
Трёхфазные асинхронные двигатели других серий номинальной мощностью свыше 200кВт изготовляют на напряжения 3, 6 и 10кВ. Для двигателей постоянного тока серии 2Д с диапазоном номинальной мощности от 0,37 до 200кВт при номинальной частоте вращения 1500 об/мин приняты напряжения 110, 220, 380 и 440В, а напряжение независимого возбуждения — 110 и 220В. Более мощные машины постоянного тока других серий изготовляют на повышенные напряжения, которые обычно не превышают 1500В.
Предприятия-изготовители выпускают открытые, защищённые и закрытые электродвигатели.
Двигатели открытого типа с большими вентиляционными отверстиями в подшипниковых щитах и станине для лучших условий охлаждения целесообразно применять в немногих случаях: приходится считаться с легкостью засорения такого двигателя в производственных условиях от посторонних предметов, пыли, влаги и грязи и опасностью поражения током обслуживающего персонала при прикосновении к открытым токоведущим частям.
Двигатели защищенного типа имеют вентиляционные отверстия, которые закрыты решетками, защищающими двигатель от попадания внутрь капель дождя, посторонних частиц, опилок и т. п., но не пыли. Такие двигатели могут устанавливаться на открытом воздухе.
Двигатели закрытого типа устанавливаются в запыленных помещениях при наличии в воздухе паров едких испарений и т. и. Для улучшения охлаждения таких двигателей применяется продувание охлаждающего воздуха. Последний подводится и отводится по специальным воздухопроводам. В сырых помещениях применяются защищенные двигатели со специальной влагостойкой изоляцией. Во взрывоопасных помещениях, содержащих горючие газы или пары, устанавливаются взрывозащищенные двигатели.
Пусковой ток электродвигателя
Зная тип и номинальную мощность электродвигателя, можно рассчитать номинальный ток.
Номинальный ток электродвигателей постоянного тока
Номинальный ток трехфазных электродвигателей переменного тока
где: PH – номинальная мощность электродвигателя; UH — номинальное напряжение электродвигателя, ηH — КПД электродвигателя; cosfH — коэффициент мощности электродвигателя.
Номинальные значения мощности, напряжения и КПД можно найти в технической документации на конкретную модель электродвигателя.
Зная значение номинального тока, можно рассчитать пусковой ток.
Формула расчета пускового тока электродвигателей
где: IH – номинальное значение тока; Кп – кратность постоянного тока к номинальному значению.
Пусковой ток необходимо рассчитывать для каждого двигателя в цепи. Зная эту величину, легче подобрать тип автоматического выключателя для защиты всей цепи.
Режимы работы электродвигателей
Режим работы определяет нагрузку на электродвигатель. В некоторых случаях она остается практически неизменной, в других может изменяться. Характер предполагаемой нагрузки обязательно учитывается при выборе двигателя. Действующими стандартами предусмотрены следующие режимы эксплуатации:
Режим S1 (продолжительный). При таком режиме эксплуатации нагрузка остается постоянной в течение всего времени, пока температура электродвигателя не достигнет необходимого значения. Мощность привода рассчитывается по формулам, приведенным выше.
Режим S2 (кратковременный). При эксплуатации в этом режиме температура двигателя в период его включения не достигает установившегося значения. За время отключения электродвигатель охлаждается до температуры окружающей среды. При кратковременном режиме эксплуатации необходимо проверять перегрузочную способность электропривода.
Режим S3 (периодически-кратковременный). Электродвигатель работает с периодическими отключениями. В периоды включения и отключения его температура не успевает достигнуть заданного значения или охладиться до температуры окружающей среды. При расчете мощности двигателя обязательно учитывается продолжительность пауз и потерь в переходные периоды. При выборе электродвигателя важным параметром является допустимое количество включений за единицу времени.
Режимы S4 (периодически-кратковременный, с частыми пусками) и S5 (периодически-кратковременный с электрическим торможением). В обоих случаях работа двигателя рассматривается по тем же параметрам, что и в режиме эксплуатации S3.
Режим S6 (периодически-непрерывный с кратковременной нагрузкой). Работа электродвигателя в данном режиме предусматривает эксплуатацию под нагрузкой, чередующуюся с холостым ходом.
Режим S7 (периодически-непрерывный с электрическим торможением)
Режим S8 (периодически-непрерывный с одновременным изменением нагрузки и частоты вращения)
Режим S9 (режим с непериодическим изменением нагрузки и частоты вращения)
Большинство моделей современных электроприводов, эксплуатируемых продолжительное время, адаптированы к изменяющемуся уровню нагрузки.
Критерии выбора электродвигателя
Электрический мотор безопасен для окружающей среды, он сокращает вредные выбросы. Если понадобится ремонт, его можно осуществить с минимальными вложениями, что делает электродвигатель практичным и универсальным.
Выбор электродвигателя зависит в первую очередь от области применения и целевого назначения. Если оборудование разработали для насосной установки, оно не подойдет для компрессора или автомобиля.
Затем предстоит выбор между моделями различной мощности и производителями.
Следующий показатель, которому должен соответствовать электродвигатель, — это энергоэффективность. Чем выше класс энергопотребления, тем быстрее окупится оборудование, а в будущем сократятся расходы. Этот параметр — решающий при покупке электродвигателя.
В интернет-магазине «Промышленная точка» вы найдете продукцию Siemens, IEK, WEG MOTOR, INNORED, INNOVARI и других компаний. Удобная сортировка по типу электродвигателя упрощает поиск и экономит ваше время. Каждый электродвигатель сопровождается полноценным описанием, чтобы удобно было сравнить характеристики.
Критерии выбора подходящего электрического двигателя:
- наименование и категория, к которой относится привод;
- мощность и количество режимов работы;
- среда эксплуатации и целевое назначение;
- эксплуатационные и механические характеристики;
- опции регулировки частоты вращения и положения ротора;
- характер будущей нагрузки и дополнительные требования к оборудованию.
При выборе электродвигателя учитывайте среду применения. Если нагрузка будет постоянной, важна максимальная мощность на приводном валу механизма, а если нет — показатели момента сопротивления по времени. Производительность электродвигателя оценивайте в зависимости от скорости вращения приводного вала.
Также обратите внимание на величину момента при пуске, на пределы регулирования скорости (верхние и нижние значения), а также на частоту пусков в течение одного часа.
Покупая электродвигатель для распространенных механизмов, ознакомьтесь с информацией, которую предоставляет производитель. В этом случае достаточно учитывать требования к сети, характер окружающей среды и тип механизма. Менеджеры «Промышленной точки» ответят на вопросы и помогут подобрать подходящую модель электродвигателя.
Климатические исполнения электродвигателей
При выборе электродвигателя учитываются не только его технические характеристики, но и условия окружающей среды, в которых он будет эксплуатироваться.
Современные электроприводы выпускаются в разных климатических исполнениях. Категории маркируются соответствующими буквами и цифрами:
- У – модели для эксплуатации в умеренном климате;
- ХЛ – электродвигатели, адаптированные к холодному климату;
- ТС – исполнения для сухого тропического климата;
- ТВ – исполнения для влажного тропического климата;
- Т – универсальные исполнения для тропического климата;
- О – электродвигатели для эксплуатации на суше;
- М – двигатели для работы в морском климате (холодном и умеренном);
- В – модели, которые могут использоваться в любых зонах на суше и на море.
Цифры в номенклатуре модели указывают на тип ее размещения:
- 1 – возможность эксплуатации на открытых площадках;
- 2 – установка в помещениях со свободным доступом воздуха;
- 3 – эксплуатация в закрытых цехах и помещениях;
- 4 – использование в производственных и других помещениях с возможностью регулирования климатических условий (наличие вентиляции, отопления);
- 5 – исполнения, разработанные для эксплуатации в зонах повышенной влажности, с высоким образованием конденсата.
Как правильно подобрать электродвигатель
При выборе электромотора учитывайте соответствие рабочей машины всем механическим характеристикам. Единой инструкции для этого нет, но, учитывая специфику приводного механизма и условия окружающей среды, реально найти подходящий электрический двигатель. От решения будет зависеть длительность безаварийной работы, эффективность и надежность.
Учтите, вы удачно выбрали электродвигатель, если удалось восстановить работу вентилятора, насоса, станка или любого другого оборудования, для которого он предназначался. При этом энергопотребление не увеличилось или стало меньше, работа выполняется качественно, и все заявленные характеристики соответствуют действительности.
Задача электродвигателя — в выполнении различных видов движений. Это могут быть точные, непрерывные или быстрые действия, с переключением передач или без. При выборе учитывайте будущий режим работы и классификацию приводов по всем рабочим характеристикам. Для непрерывной работы без переключения понадобится асинхронный двигатель, если нужно быстрое ускорение — синхронный, а для точного позиционирования — шаговый электромотор.
Выбирая электродвигатель по мощности, нужно определить характер воздействия, которое приходится на оборудование. Данный показатель оценивайте по номинальной нагрузке и изменениям потребляемой мощности. Рабочий период привода может быть кратковременным, продолжительным или повторно-кратковременным. В первом случае нагрев отсутствует, и на время остановки оборудование успевает остыть. В таком режиме работают приводы различных механизмов. Во втором случае оборудование нагревается до максимальных значений. Это характерно для вентиляторов, насосов, ленточных транспортеров и т. д. Повторно-кратковременный режим включения электромотора означает, что механизм включается на 15 %, 25 %, 40 % и 60 % до 10 минут для каждого цикла. Он подходит некоторым станкам, подъемным кранам, сварочным генераторам.
Энергоэффективность
Рациональное потребление энергии при сохраняющейся высокой мощности сокращает текущие производственные затраты при одновременном увеличении производительности электродвигателя. Поэтому при выборе привода обязательно учитывается класс энергоэффективности.
В технической документации и каталогах обязательно указывается класс энергоэффективности двигателя. Он зависит от показателя КПД.
Проводимые в тестовом и рабочем режимах экспериментальные исследования показывают, что электродвигатель мощностью 55 кВт высокого класса энергоэффективности сокращает потребление электроэнергии на 8-10 тысяч кВт ежегодно.
Другие полезные материалы:
Редуктор от «А» до «Я» Как выбрать мотор-редуктор Выбор преобразователя частоты Подключение и настройка частотного преобразователя
Класс энергоэффективности
В настоящее время вопросам энергоэффективности уделяется огромное внимание. При этом под энергоэффективностью понимается рациональное использование энергетических ресурсов, с помощью которого достигается уменьшение потребления энергии при том же уровне мощности нагрузки. Основным показателем энергоэффективности двигателя является его коэффициент полезного действия
где Р2 – полезная мощность на валу, Р1 – потребляемая активная мощность из сети.
Стандартом IEC 60034-30 для асинхронных электродвигателей с короткозамкнутым ротором были установлены три класса энергоэффективности: IE1, IE2, IE3.
Рис. 1. Классы энергоэффективности
Так, например, использование двигателя мощностью 55 кВт повышенного класса энергоэффективности позволяет сэкономить около 8000 кВт в год от одного двигателя.