Выводы обмоток электродвигателя — схемы соединения
Обозначение выводов обмоток статора
Каждый статор трехфазного электродвигателя имеет три катушечные группы (обмотки) — по одной на каждую фазу, а у каждой катушечной группы имеется по 2 вывода — начало и конец обмотки, т.е. всего 6 выводов которые подписываются следующим образом:
- С1 (U1) — начало первой обмотки, С4 (U2) — конец первой обмотки.
- С2 (V1) — начало второй обмотки, С5 (V2) — конец второй обмотки.
- С3 (W1) — начало третьей обмотки, С6 (W2) — конец третьей обмотки.
Условно на схемах каждая обмотка изображается следующим образом:
Начала и концы обмоток выводятся в клемную коробку электродвигателя в следующем порядке:
В зависимости от соединения этих выводов меняются такие параметры электродвигателя как напряжение питающей сети и номинальный ток статора. О том по какой схеме необходимо подключить обмотки электродвигателя можно узнать из паспортных данных.
Основными схемами соединения обмоток являются треугольник (обозначается — Δ) и звезда (обозначается — Y) их мы и разберем в данной статье.
Примечание: В клемной коробке некоторых электродвигателей можно увидеть только три вывода — это значит, что обмотки двигателя уже соединены внутри его статора. Как правило внутри статора обмотки соединяются при ремонте электродвигателя (в случае если заводские обмотки сгорели). В таких двигателях обмотки, как правило, соединены по схеме «звезда» и рассчитаны на подключение в сеть 380 Вольт. Для подключения такого двигателя необходимо просто подать три фазы на три его вывода.
Схема соединения обмоток электродвигателя по схеме «треугольник»
Что бы соединить обмотки электродвигателя по схеме «треугольник» необходимо: конец первой обмотки (С4/U2) соединить с началом второй (С2/V1) , конец второй (С5/V2) — с началом третьей (С3/W1) , а конец третьей обмотки (С6/W2) — с началом первой (С1/U1).
Условно на схеме это изображается следующим образом:
На выводы «A», «B» и «C» подается напряжение.
В клемной коробке электродвигателя соединение обмоток по схеме «треугольник» имеет следующий вид:
A, B, C — точки подключения питающего кабеля.
Схема соединения обмоток электродвигателя по схеме «звезда»
Что бы соединить обмотки электродвигателя по схеме «звезда» необходимо концы обмоток (С4/ U2, С5/V2 и С6/W2) соединить в общую точку, напряжение при этом подается на начала обмоток (С1/U1, С2/V1 и С3/W1).
Условно на схеме это изображается следующим образом:
В клемной коробке электродвигателя соединение обмоток по схеме «звезда» имеет следующий вид:
Определение выводов обмоток
Иногда возникают ситуации когда сняв крышку с клемной коробки электродвигателя можно с ужасом обнаружить следующую картину:
При этом выводы обмоток не подписаны, что же делать? Без паники, этот вопрос вполне решаем.
Первое, что нужно сделать — это разделить выводы по парам, в каждой паре должны быть выводы относящиеся к одной обмотке, сделать это очень просто, нам понадобится тестер или двухполюсный указатель напряжения.
В случае использования тестера устанавливаем его переключатель в положение измерения сопротивления (подчеркнуто красной линией), при использовании двухполюсного указателя напряжения им, перед применением, необходимо коснуться токоведущих частей находящихся под напряжением на 5-10 секунд, для его зарядки и проверки работоспособности.
Далее необходимо взять один любой вывод обмотки, условно примем его за начало первой обмотки и соответственно подписываем его «U1», после касаемся одним щупом тестера или указателя напряжения подписанного нами вывода «U1», а вторым щупом любого другого вывода из оставшихся пяти неподписанных концов. В случае, если коснувшись вторым щупом второго вывода показания тестера не изменились (тестер показывает единицу) или в случае с указателем напряжения — ни одна лампочка не зажглась — оставляем этот конец и касаемся вторым щупом другого вывода из оставшихся четырех концов, перебираем вторым щупом концы до тех пор пока показания тестера не изменятся, либо, в случае с указателем напряжения — до тех пор пока не загорится лампочка «Test». Найдя таким образом второй вывод нашей обмотки принимаем его условно как конец первой обмотки и подписываем его соответственно «U2».
Таким же образом поступаем с оставшимися четырьмя выводами, так же разделив их на пары подписав их соответственно как V1,V2 и W1,W2. Как это делается можно увидеть на видео ниже.
Теперь, когда все выводы разделены по парам, необходимо определить реальные начала и концы обмоток. Сделать это можно двумя методами:
Первый и самый простой метод — метод подбора, может применяться для электродвигателей мощностью до 5 кВт. Для этого берем наши условные концы обмоток (U2,V2 и W2) и соединяем их, а на условные начала (U1,V1 и W1), кратковременно, желательно не более 30 секунд, подаем трехфазное напряжение:
Если двигатель запустился и работает нормально, значит начала и концы обмоток определены верно, если двигатель сильно гудит и не развивает должные обороты, значит где то есть ошибка. В этом случае необходимо всего лишь поменять любые два вывода одной обмотки местами, например U1 c U2 и запустить заново:
Обозначение выводов обмоток асинхронных машин
ОБЩИЕ ВОПРОСЫ
ИСПЫТАНИЙ АСИНХРОННЫХ МАШИН
1.1. Номинальные величины и основные определения
По конструктивному исполнению асинхронные машины бывают трехфазного и однофазного тока, с фазным и короткозамкнутым ротором, общепромышленного и специального назначения. Асинхронные машины могут работать в режимах двигателя, генератора и электромагнитного тормоза; могут возбуждаться как со стороны статора, так и со стороны ротора.
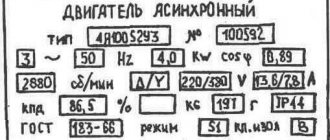
Номинальными данными электрической машины называются данные, указанные на заводском щитке и характеризующие ее номинальный режим работы: номинальная мощность, номинальное напряжение, номинальный ток, номинальная частота вращения, номинальные коэффициент полезного действия и коэффициент мощности. Термин «номинальный» может применяться также и к данным, не указанным на заводском щитке электрической машины, но относящимся к ее номинальному режиму работы, например: номинальный момент вращения, номинальное скольжение. Номинальные данные машины относятся к ее работе в условиях высоты над уровнем моря до 1000 м и при температуре окружающей среды до +40°С.
Номинальным режимом работы электрической машины называется такой режим, для которого машина предназначена заводом-изготовителем и при котором она должна работать в течение всего срока службы. Согласно ГОСТ 183-74 «Машины электрические вращающиеся. Общие технические условия» рассматривают следующие номинальные режимы электрической машины: продолжительный (S1); кратковременный (S2) и повторно-кратковременный (S3).
Кратковременный номинальный режим работы электрической машины характеризуется длительностью рабочего периода соответственно 10, 30, 60, 90 мин.
Повторно-кратковременный режим работы характеризуется относительной продолжительностью включения (ПВ), т.е. отношением продолжительности рабочего периода к продолжительности цикла (суммарной продолжительности рабочего периода и паузы). Согласно стандарту ПВ составляет 15, 25, 40, 60 % с продолжительностью одного цикла не более 10 мин, если иное не указано в технических условиях или заводских требованиях.
Нагрузкой электрической машины называется мощность, которую развивает электрическая машина в данный момент времени. Нагрузка выражается в ваттах или в киловаттах, а также в процентах или в долях от номинальной мощности. Нагрузка может быть задана током, потребляемым или отдаваемым электрической машиной в данный момент времени, и выражена в амперах, в процентах или в долях от номинального тока. Нагрузка двигателя задается величиной тормозящего момента на выходном валу. Чтобы изменить нагрузку двигателя, следует изменить тормозящий момент на его валу.
Направление вращения электрического двигателя с горизонтальным валом определяется со стороны присоединения его к рабочему механизму: по часовой стрелке – правое вращение, против часовой стрелки – левое вращение.
Обозначение выводов обмоток асинхронных машин
В электрических машинах выводы обмоток должны обозначаться в соответствии с ГОСТ 183-74 для машин, разработанных до 1987 г. или модернизируемых, и в соответствии с ГОСТ 26772-85 «Машины электрические вращающиеся. Обозначение выводов и направления вращения» для машин, выпускаемых с 01.01.87 г.
Согласно ГОСТ 183-74 выводы асинхронных машин обозначаются следующим образом: обмотки статора – буквой «С»; обмотки ротора – буквой «Р». Трехфазные обмотки кроме букв обозначаются цифрами: начала фаз – цифрами «1, 2, 3», концы фаз – цифрами «4, 5, 6»; нулевая точка (независимо от того, заземлена она или нет) – цифрой «0».
Если трехфазная машина не имеет секционированных и составных обмоток на статоре, то обозначения выводов обмоток на статоре должны производиться в соответствии с табл. 1.1. Обозначения выводов обмоток статора однофазных машин производятся согласно данным, приведенным в табл. 1.2.
Контактные кольца роторов трехфазных асинхронных двигателей согласно стандарту обозначаются буквами, соответствующими обозначениям присоединенных к ним выводов обмотки ротора (табл. 1.3). При этом расположение колец выполняется в порядке следования фаз, а кольцо Р1, соответствующее первой фазе, должно быть наиболее удаленным от обмотки ротора. При трех выводах нулевая точка обмотки не выводится.
В соответствующих таблицах приведены обозначения согласно ГОСТ 26772-85.
Таблица 1.1. Наименование выводов обмоток статора асинхронных машин и их обозначения
| Схема соединения обмоток | Число выводов | Наименование фазы и вывода | Обозначения выводов | ||
| ГОСТ 183-74 | ГОСТ 26772-85 | ||||
| начало | конец | начало | конец | ||
| Открытая схема | Первая фаза | С1 | С4 | U1 | U2 |
| Вторая фаза | С2 | С5 | V1 | V2 | |
| Третья фаза | С3 | С6 | W1 | W2 | |
| Соединение в звезду | или | Первая фаза | С1 | U | |
| Вторая фаза | С2 | V | |||
| Третья фаза | С3 | W | |||
| Нулевая фаза (точка звезды) | N | ||||
| Соединение в треугольник | Первый вывод | С1 | U | ||
| Второй вывод | С2 | V | |||
| Третий вывод | С3 | W |
Таблица 1.2. Обозначение выводов однофазных машин
| Число выводов | Название выводов обмоток статора | Обозначение выводов | ||
| ГОСТ 183-74 | ГОСТ 26772-85 | |||
| начало | конец | начало | конец | |
| Главная обмотка | С1 | С2 | U1 | U2 |
| Вспомогательная обмотка | В1 | В2 | Z1 | Z2 |
Таблица 1.3. Обозначение выводов обмотки ротора
| Число выводов | Название фазы и вывода | Обозначение вывода | |
| ГОСТ 183-74 | ГОСТ 26772-85 | ||
| 3 или 4 | Первая фаза | Р1 | K |
| Вторая фаза | Р2 | L | |
| Третья фаза | Р3 | M | |
| Нулевая фаза (точка звезды) | Q |
Методы испытания асинхронных машин
При испытании асинхронных двигателей наибольшее значение имеют опыты холостого хода, короткого замыкания и непосредственной нагрузки, близкой к номинальной [1]. Для эффективного использования результатов опытов необходимо также знать величину активного сопротивления фазы обмотки статора машины.
Все методы, применяемые при промышленных испытаниях электрических машин, сведены в ГОСТ 11828-86 «Машины электрические вращающиеся. Общие методы испытаний». Особые стандарты регламентируют специфические методы испытания для данного вида электрической машины. Для асинхронных машин разработан ГОСТ 7217-87 «Машины электрические вращающиеся. Двигатели асинхронные. Методы испытаний», а также ряд других.
Опыты холостого хода и короткого замыкания широко используются при испытании асинхронных двигателей всех мощностей и типов. Особенно ценны результаты этих опытов в тех случаях, когда нет возможности испытать двигатель в режиме непосредственной нагрузки. Для асинхронных двигателей, используя данные опыта холостого хода, короткого замыкания и величину активного сопротивления фазы обмотки статора, можно построить круговую диаграмму, из которой определяются значения КПД, коэффициента мощности, скольжения, величины пускового тока, пускового момента, наибольшего вращающего момента и т.д.
Опыт непосредственной нагрузки дает возможность определить основные показатели двигателя. В этом случае нагрузка двигателя осуществляется при помощи любого тормозного устройства на валу двигателя. Указанный метод широко применяется при испытании двигателей малой и средней мощности.
Основные показатели асинхронных двигателей, полученные из опыта непосредственной нагрузки или найденные по круговой диаграмме, должны быть проверены на соответствие с требованиями ГОСТ 183-74, приведенными в табл. 1.4. В тех случаях, когда допускаемые отклонения указаны с одним знаком, только с плюсом или только с минусом, отклонение в противоположную сторону не ограничивается. На отдельные виды машин могут быть установлены более высокие требования в стандартах или технических условиях заводов-изготовителей. Приведенные в табл. 1.4 данные соответствуют номинальному режиму работы машины. При отклонении какого-либо параметра результаты измерений должны быть приведены к номинальным значениям напряжения, частоты сети и мощности двигателя.
Таблица 1.4. Отклонения показателей асинхронных двигателей, допускаемые ГОСТ 183-74
| Наименование показателей | Допускаемые отклонения |
| Коэффициент полезного действия (КПД) электрических машин* мощностью до 50 кВт | – 0,15 (1 – η) |
| Коэффициент мощности (cosφ) асинхронных двигателей** | – (1 – cosφ)/6, но не мене 0,02 и не более 0,07 по абсолютной величине |
| Скольжение ( S ) | ± 20 %, знак минус только для электродвигателей с повышенным скольжением |
| Начальный пусковой ток двигателей мощностью более 0,6 кВт при f=50 Гц (к.з. ротор) | +20 % |
| Начальный пусковой вращающий момент асинхронных двигателей на частоту f=50 Гц | – 15 % |
| Максимальный вращающий момент асинхронных двигателей | – 10 % |
Примечания:
*С округлением допускаемых отклонений до третьего знака.
**Допускаемое отклонение не распространяется на однофазные асинхронные двигатели с рабочим конденсатором.
Опыт холостого хода
Режимом холостого хода называется такой режим, когда ротор асинхронного двигателя вращается при отсутствии механической нагрузки на валу. В этом случае скорость ротора близка к синхронной скорости, но не равна ей, а ток ротора близок к нулю. Характеристики холостого хода представляют собой зависимости тока I0, потребляемой мощности P0 и коэффициента мощности cos φ0 от подводимого напряжения U10 при холостом ходе двигателя:
I0; P0; cos φ0 = f(U10).
После пуска двигателя в ход нужно, согласно рекомендациям ГОСТ 7217-87 «Машины электрические вращающиеся. Двигатели асинхронные. Методы испытаний», дать возможность проработать двигателю без нагрузки в течение 15 – 30 мин (при номинальной мощности двигателя до 10 кВт) до проведения опыта холостого хода. При снятии характеристик холостого хода подводимое к двигателю напряжение изменяется от U10 = (1,1 – 1,3)U1Н до U10 = (0,2 – 0,4)U1Н так, чтобы получить примерно 6 – 8 точек. У некоторых типов двигателей (обычно с короткозамкнутым ротором) при снижении напряжения заметно уменьшается частота вращения ротора и наблюдается рост потребляемого из сети тока. В этом случае при проведении опыта холостого хода снижение напряжения на зажимах двигателя прекращают. Это предельные точки режима холостого хода.
Принципиальный вид кривых характеристик холостого хода представлен на рис. 1.1.
Мощность Р0 при холостом ходе с увеличением напряжения изменяется по квадратичной зависимости, так как это связано с изменением потерь в стали, которые пропорциональны квадрату напряжения. Остальные потери практически неизменны в области постоянной частоты вращения вала (потери механические и добавочные) или достаточно малы из-за малого тока холостого хода (электрические потери в обмотке статора рэл = m I02 r1). Изменение тока холостого хода I0 и коэффициента мощности cos j0 определяется, главным образом, реактивной составляющей тока, которая создает магнитное поле в машине и соответствует ее кривой намагничивания.
Опыт короткого замыкания
Режимом короткого замыкания асинхронного двигателя называют режим, при котором ротор заторможен и замкнут на себя. Если на зажимы двигателя подано номинальное напряжение, то потребляемый при этом из сети ток IКН в несколько раз выше номинального тока, IКН = (4 – 7)IН. Поэтому при проведении опыта короткого замыкания на обмотку статора подается пониженное напряжение, чтобы ток не превышал 1,1 IН.
Характеристики короткого замыкания представляют собой зависимость тока IК, потребляемой мощности PК и коэффициента мощности cos jК от подводимого напряжения UК при коротком замыкании двигателя:
IК; PК; cos jК = f (UК).
Величина индуктивного сопротивления короткого замыкания асинхронной машины хК, а также ток короткого замыкания зависят от взаимного положения зубцов статора и ротора. Поэтому при пониженном напряжении, медленно поворачивая ротор, надо отметить по амперметру наибольшее и наименьшее значения тока статора. Затем ротор при помощи механического устройства следует закрепить неподвижно в положении, соответствующем среднему значению тока.
Напряжение повышают до значения, при котором ток короткого замыкания достигает величины IК = 1,1 IН, и записывают показания приборов. Подводимое напряжение затем уменьшают и записывают показания приборов. Получают 5 – 6 замеров при уменьшении тока короткого замыкания до нуля. Снятие характеристик от большего значения тока к меньшему необходимо для поддержания стабильности температурного режима машины. При увеличении тока, по мере достижения его больших значений, температура машины значительно увеличивается по сравнению с началом опыта, так как потери в меди пропорциональны квадрату тока. Принципиальный вид характеристик короткого замыкания представлен на рис. 1.2.
Мощность короткого замыкания РК, определяемая потерями в обмотках машины, практически пропорциональна квадрату напряжения короткого замыкания, так как ток короткого замыкания IК почти пропорционален напряжению. Это объясняется сильным размагничиванием машины токами ротора, малым основным магнитным потоком и слабым насыщением магнитной цепи машины.
Таблица 2.1. Технические данные электрических машин постоянного и переменного тока, преобразователя угловых перемещений
| Машина постоянного тока (тип 101.2) | |
| Номинальная мощность, Вт | |
| Номинальное напряжение якоря, В | |
| Номинальный ток якоря, А | 0,56 |
| Сопротивление обмотки якоря и щеточного контакта Rа, Ом | 70 – 80 |
| Обмотка возбуждения имеет две обмотки – Е1–Е2 Е3–Е4 | |
| Возбуждение машины: независимое или параллельное – обмотки возбуждения соединяются последовательно; последовательное ‑ обмотки возбуждения соединяются параллельно. | |
| Номинальный ток отдельной обмотки возбуждения, А | 0,25 |
| Напряжение одной обмотки возбуждения Uf, В | 110 В |
| Сопротивление одной обмотки возбуждения Rf, Ом | |
| КПД, % | 57,2 |
| Направление вращения | реверсивное |
| Номинальная частота вращения, мин–1 | |
| Режим работы | двигательный, генераторный |
| Машина переменного тока (тип 102.1) | |
| Число фаз на статоре | |
| Число фаз на роторе | |
| Схема соединения обмоток статора | |
| Схема соединения обмотки ротора | Y |
| Сопротивление фазной обмотки Rа, Ом | |
| Частота тока, Гц | |
| синхронная машина | |
| Номинальная активная мощность, Вт | |
| Номинальное напряжение, В | |
| Номинальный ток статора, А | 0,26 |
| Ток возбуждения холостого хода, А | 1,6 |
| Номинальное напряжение возбуждения, В | |
| Номинальный ток возбуждения, А | 1,85 |
| Номинальная частота вращения, мин–1 | |
| асинхронная машина | |
| Номинальная полезная активная мощность, Вт | |
| Номинальное напряжение, В | |
| Номинальный ток статора, А | 0,35 |
| КПД, % | |
| cos jH | 0,73 |
| Номинальная частота вращения, мин–1 | |
| Преобразователь угловых перемещений (тип 104) | |
| Модель | ВЕ 178А |
| Число выходных каналов | |
| Число импульсов за оборот в серии | |
| Диапазон изменения частот вращения вала, мин-1 | 0 . . . 6000 |
Переченьи данные аппаратуры стенда приведены в табл. 2.2.
Таблица 2.2. Перечень и технические данные аппаратуры стенда
| Обозначение/Тип | Наименование | Параметры |
| G1/201.2 | Трехфазный источник питания | ~ 400 В / 16 А |
| G2/206.1 | Источник питания постоянного тока | = от 0 до 250 В/ 3 А (якорь) = 220 В/ 1 А (возбужд.) |
| G3/209.2 | Возбудитель синхронной машины | = от 0 до 40 В / 3,5 А |
| А2/347.1 | Трёхфазная трансформаторная группа | ~ 3´80 ВА/ 230 В/242,235, 230, 226, 220, 133, 127 В |
| А6, А8 /301.1 | Трехполюсный выключатель | ~ 400 В / 10 А |
| А9/307.1 | Реостат в цепи ротора машины переменного тока | 3 ´ 0…40 Ом / 1 А |
| А10/306.1 | Активная нагрузка | 220 В / 3´0…50 Вт; |
| А11/308.1 | Реостат | 0…2000 Ом / 0.3 А |
| А13/323.2 | Реостат | 2×0…100 Ом / 1 А |
| Р1/508.2 | Блок мультиметров | = ~ от 0 до 1000 В / от 0 до 10 А / от 0 до 20 МОм |
| Р2/507.2 | Измеритель мощностей активной и реактивной | 15; 60; 150; 300; 600 В / 0,05; 0,1; 0,2; 0,5 А. |
| Р3/506.2 | Указатель частоты вращения | минус 2000…0…плюс 2000 мин-1 |
Для работы стенда необходимо выполнить электрическую схему соединений тепловой защиты машины переменного тока с блоком трехфазного источника питания (рис. 2.1).
Для измерения электрических величин (тока, напряжения и омического сопротивления) используется электронный мультиметр. Для его подключения к цепи необходимо выполнить следующее:
— установить род тока (постоянный / переменный);
— выбрать диапазон измерений соответственно ожидаемому результату измерений;
— правильно подсоединить зажимы мультиметра к измеряемой цепи (рис. 2.2 – 2.4).
На каждом стенде установлен блок из трех мультиметров, позволяющий иметь три прибора измерения тока и напряжения в любом количественном сочетании амперметров и вольтметров в пределах трех.
Рис. 2.2. Присоединение мультиметра (как вольтметра) для измерения напряжения
В качестве нагрузки асинхронного двигателя используется генератор постоянного тока независимого или параллельного возбуждения. Вид возбуждения в данном случае не играет роли. Принципиальные электрические схемы генератора при независимом и параллельном включениях показаны на рис. 2.5.
а) б)
Рис. 2.5. Схема соединений в генераторе постоянного тока
при независимом (а) и параллельном (б) возбуждении
Приведенные на схеме приборы в цепи возбуждения генераторов в данной лабораторной работе не нужны и могут использоваться для контроля тока в обмотках асинхронной машины. Необходимо только следить, чтобы напряжение на обмотке возбуждения машины постоянного тока не превышало 230 В. Вольтметр, измеряющий напряжение на зажимах якоря, также следует использовать для измерения напряжения на зажимах асинхронной машины. При необходимости он может быть переключен обратно на машину постоянного тока. Амперметр в цепи якоря необходим для контроля нагрузки генератора.
Для исследования работы асинхронной машины в режиме генератора необходим двигатель с плавным регулированием частоты вращения вала. В качестве такого двигателя используется машина постоянного тока. Возможные схемы электрических соединений в двигателе постоянного тока приведены на рис. 2.6. Все сказанное выше об использовании приборов справедливо и для приведенных схем машины в режиме двигателя.
а) б)
Рис. 2.6. Схема соединений в двигателе постоянного тока
при независимом (а) и параллельном (б) возбуждении
Независимое возбуждение двигателя постоянного тока предпочтительнее, так как позволяет регулировать частоту вращения вала агрегата точнее, чем при параллельном возбуждении, что важно при исследовании генераторного режима асинхронной машины.
При работе со стендом следует соблюдать несколько правил.
До сборки схемы следует убедиться, что все выключатели стоят в положении «ВЫКЛ», переключатели режимов работы источников питания в положении «РУЧН», регулятор напряжения источника питания постоянного тока вывернут в крайнее левое положение, соответствующее нулевому значению напряжения.
Точки заземления используемых блоков напрямую или через заземляющие точки других блоков должны быть соединены с заземляющими точками трехфазного источника питания стенда.
В ходе сборки схемы следует правильно устанавливать, а после сборки еще раз проверить режимы работы измерительных приборов, род тока и диапазон измеряемых величин.
Перед включением стенда схему должен проверить инженер-лаборант или преподаватель.
Не следует включать основной источник питания стенда при включенном источнике питания постоянного тока или при большом числе блоков с выключателями в положении «ВКЛ». При включении трехфазного источника питания это ведет к броску тока, срабатыванию устройства защитного отключения (УЗО) и отключению автоматических выключателей в одной или двух–трех фазах.
С ФАЗНЫМ РОТОРОМ
Цель работы
Целью работы является испытание асинхронной машины с фазным ротором в двигательном и генераторном режимах, режимах холостого хода и короткого замыкания, ознакомление со способом пуска машины в ход, обучение построению круговой диаграммы и ее использованию.
Программа работы
1. Ознакомиться с конструкцией машины и записать ее паспортные данные.
2. Измерить и привести к рабочей температуре 75°С сопротивления фаз обмоток статора и ротора.
3. Определить коэффициент трансформации фазных напряжений двигателя с фазным ротором.
4.Осуществить пуск в ход и изменение направления вращения двигателя.
5. Снять и построить характеристики холостого хода двигателя:
I0; P0; Q0; n0; cosφ0 = f (U0).
6.Снять и построить характеристики короткого замыкания:
IК; PK; QК; cosφК = f (UK).
7.Снять и построить рабочие характеристики машины с фазным ротором в двигательном и генераторном режимах:
I1; P1; Q1; M2; n; s; cosφ; η = f (P2).
8. По данным опытов холостого хода и короткого замыкания построить круговую диаграмму асинхронной машины и определить по ней эксплуатационные параметры в режиме номинальной нагрузки и все виды потерь.
Лабораторный стенд
Установка, электрическая схема которой представлена на рис. 3.1, состоит из асинхронной машины и сочлененного с ней нагрузочного генератора постоянного тока. Валы двигателя и генератора соединены муфтой, имеется специальное устройство для «стопорения» валов, необходимое при проведении опыта короткого замыкания.
Испытуемый двигатель подключается к трехфазному источнику напряжения (G1/201.2) через два последовательно включенных трансформатора (А2/347.1), линейный реактор (А14/314.2) и трехполюсный выключатель (А6/301.1). Напряжение на двигателе и потребляемый им ток измеряются двумя приборами блока мультиметров (Р1/508.2). Третий прибор включен как амперметр в цепь якоря генератора постоянного тока. В одну из фаз двигателя включен измеритель активной и реактивной мощностей (Р2/506.2). Электрическая схема изображена также в прил. В рис. В.1 в формате А4.
Паспортные данные машин приведены в табл. 2.1. Обозначение выводов обмоток статора и ротора асинхронного двигателя соответствуют табл. 1.1, 1.3. Нагрузку в фазах асинхронного двигателя можно считать симметричной, поэтому ток, напряжение и мощности двигателя измеряются в одной фазе. Для повышения точности измерения ваттметр имеет тумблер переключения в положение «х10», которое уменьшает цену деления в 10 раз, то есть измеренные данные согласно предельному значению шкалы Рпр = Uпр ∙ Iпр ,получаемому по установленным переключателями предельным значениям напряжения Uпр и тока Iпр , следует разделить на 10. Величина показаний реактивной мощности при этом не изменяется, а предельное значение шкалы определяется по установленным предельным значениям напряжения и тока Qпр = Uпр ∙ Iпр .
Генератор постоянного тока с независимой обмоткой возбуждения (ОВ) подключается на нагрузочное сопротивление RН (А10/306.1). Изменение нагрузки на валу асинхронного двигателя осуществляется регулированием тока возбуждения нагрузочного генератора, что ведет к изменению в нем тока якоря, создающего тормозящий момент относительно приводного двигателя, роль которого выполняет исследуемая асинхронная машина. Регулирование тока возбуждения осуществляется поворотом по часовой стрелке регулировочной рукоятки источника постоянного тока (G2/206.1). В начале регулирования заметна «мертвая зона».
Для осуществления генераторного режима асинхронной машины генератор постоянного тока с независимым возбуждением подключается на параллельную работу с сетью и служит в дальнейшем приводным двигателем при переводе асинхронной машины в режим генератора. Нагрузка асинхронного генератора изменяется регулированием напряжения на обмотке якоря двигателя постоянного тока, что ведет к изменению тока якоря приводного двигателя, создающего вращающий момент электромашинного агрегата, роль нагрузки в котором выполняет исследуемый асинхронный генератор.
Гнезда защитного заземления « » всех используемых устройств необходимо соединить с гнездом «РЕ» трехфазного источника питания G1. Перед началом работы переключатели режима работы источника постоянного тока G2 и выключателя А6 установите в положение «РУЧН.». В трехфазных трансформаторных группах А2 и А7 установите номинальное напряжение обмоток равным 220 В.
Методические указания
Опыт холостого хода
Характеристики холостого хода представляют собой зависимости тока, мощности активной и реактивной, частоты вращения вала и коэффициента мощности от величины подводимого к двигателю напряжения в режиме холостого хода:
I0; P0; Q0; n0; cosφ0 = f (U0).
Порядок проведения опыта холостого хода изложен в п. 1.5 данных методических указаний. Приборы, замеряющие ток, мощность и напряжение в цепях двигателя, выбираются по номинальному напряжению и величине тока холостого хода, который у асинхронных двигателей составляет 25 – 50 % от номинального тока. У исследуемого двигателя IН = 0,35 А и UНЛ = 127 В. После пуска двигателя в ход выводят до нуля пусковые сопротивления в цепи ротора. При снятии характеристик в режиме холостого хода двигателя подводимое напряжение U0 изменяется от повышенного значения, примерно на 10 – 20 % выше номинального U0 = 1,2 UН, до величины U0 = 0,4 UН, при которой еще возможна устойчивая работа двигателя. Дальнейшее снижение напряжения ведет к заметному уменьшению частоты вращения вала и увеличению потребляемого из сети тока. Для контроля этого эффекта полезно снять зависимость Q0 и частоты вращения n0 вала двигателя от величины напряжения холостого хода. Как только потребляемый из сети ток начнет расти по мере уменьшения напряжения, следует прекратить дальнейшее снижение напряжения и прервать проведение опыта.
Изменение напряжения на двигателе производится переключением отпаек обмоток трехфазных трансформаторных групп на первичной и вторичной сторонах. Следует иметь в виду, что переключение напряжения на первичной стороне трансформатора в сторону больших напряжений ведет к уменьшению напряжения на вторичной стороне. На вторичной стороне трансформатора для уменьшения напряжения на двигателе следует переключатель устанавливать на меньшие значения. Во всем диапазоне измерений делают 6 – 7 замеров. При этом обязательно надо снять точки при напряжении несколько выше номинального и ниже половины его номинального значения. Данные измерений занести в табл. 3.1.
В таблице приняты обозначения: U0Л – линейное напряжение сети, В; I0Л – линейный ток сети, А; PW0 – активная мощность одной фазы, Вт; QW0 – реактивная мощность одной фазы, вар; n0 – частота вращения вала, об/мин. Остальные величины пояснены в ходе расчета.
Таблица 3.1. Характеристики холостого хода
| Из опыта | Из расчета | |||||||||
| U0Л, B | I0Л, A | PW0, Вт | QW0, вар | n0, об/мин | U0Ф, B | Q0, вар | Р0, Вт | рэл1, Вт | рмх+рст+рд Вт | cosφ0 |
Реальные испытания асинхронного двигателя лучше проводить с использованием измерительных комплектов К50 или К505, которыми токи, напряжения и мощности могут измеряться в каждой фазе отдельно без переборки схемы. Ток и напряжение холостого хода берутся как средние арифметические значения токов и напряжений фаз. Мощность холостого хода Р0 определяется суммированием модулей мощностей всех фаз. Измерения при использовании измерительных комплектов длительны, но позволяют получить более точную и достоверную информацию о машине (симметричность напряжений и токов, равенство сопротивлений фаз обмоток и т.д.). Нарушения симметрии напряжений и токов говорит о наличии витковых или фазных замыканий в обмотках двигателя. Эти измерительные комплекты используются и при испытаниях двигателя во всех других режимах работы.
Обработка результатов испытаний.Обмотки статора асинхронного двигателя соединены в звезду (Y). Поэтому линейное напряжение сети U0Л равно линейному напряжению двигателя и определится по показанию вольтметра.
Потребляемый двигателем линейный ток холостого хода I0Л, равный фазному току I0Ф = I0Л, определится показаниями включенного в цепь амперметра. Мощность, потребляемая двигателем из сети, равна утроенному показанию однофазного ваттметра, Р0 = 3РW0. Аналогично определяется и потребляемая реактивная мощность, Q0 = 3QW0.
После определения базовых величин режима холостого хода рассчитываются фазное напряжение двигателя и коэффициент мощности:
; .
Электрические потери в обмотке статора двигателя, сумма потерь в стали, механических и добавочных потерь машины определятся как
рэл1 = 3(I0Ф)2 r1 75 ; рΣ = рст + рмх + рд = Р0 – рэл1.
Приняты следующие обозначения величин: рэл1 – электрические потери в обмотке статора, Вт; I0Ф – фазный ток, равный измеренному амперметром линейному току (I0Ф = I0Л), соединение «звезда» (Y), А; r1 75 – активное сопротивление фазы обмотки, приведенное к рабочей температуре 75оС (см. п. 1.4), Ом; рΣ – сумма потерь двигателя в стали, механических и добавочных, Вт; рст – потери в стали сердечника статора, Вт; рмх – потери механические, Вт; рд – потери добавочные, Вт; рд = 0,005 РН; P0 – полная активная мощность холостого хода, Вт.
Потерями в обмотке ротора при холостом ходе обычно пренебрегают, так как ток холостого хода ротора мал, а потери в стали сердечника ротора пренебрежимо малы до скольжения s = 0,2, при котором частота перемагничивания не превышает 10 Гц. В расчетных данных должны быть результаты, позволяющие получить по построенным опытным кривым данные в точках, соответствующих номинальному напряжению U = UН и напряжению, равному половине его номинального значения, U = 0,5 UН.
По полученным результатам строят зависимости I0; P0; Q0; n0; cosφ0 = f (U0) на шкальной диаграмме согласно требованиям к техническому отчету [2, 3] (рис. А.2). Вид основных получаемых в опыте зависимостей показан на рис. 1.1. Неиспользованные результаты расчета потребуются в дальнейшем для построения круговой диаграммы двигателя.
Опыт короткого замыкания
Особенности проведения опыта короткого замыкания изложены в п. 1.5 данных методических указаний. Обмотка ротора двигателя замкнута накоротко – пусковые сопротивления в фазах ротора выведены до нуля, ротор двигателя застопорен. Перед началом опыта напряжение, подводимое к обмотке статора, должно быть снижено до минимально возможного значения, лучше до нуля. В этом следует убедиться, подключив к зажимам питающей сети (рис. 3.1, блок А6) только вольтметр при отключенном двигателе. Изменяют напряжение на двигателе установкой переключателей первичной и вторичной обмоток трехфазных трансформаторов на соответствующие отпайки. Наименьшее напряжение на двигателе достигается при установке переключателей первичных обмоток на отпайки 245 В, а вторичных переключателей – 133 В. Линейный реактор А14 должен быть обязательно включен в схему. Он служит для ограничения токов в цепях и более глубокого снижения напряжения на зажимах двигателя в режиме короткого замыкания.
Величины индуктивного сопротивления хК и тока IК двигателя в режиме короткого замыкания зависят от взаимного расположения зубцов ротора и статора. Поэтому следует подать на обмотку статора небольшое напряжение, при котором ротор еще не может развернуться, но возможен отсчет тока в обмотке статора по включенному амперметру. Медленно поворачивая ротор руками или специальным приспособлением для двигателей большой мощности, находят положение, соответствующее среднему значению тока в обмотке статора. В этом положении ротор закрепляется стопорящим устройством. В двигателе, используемом в лаборатории, положение ротора очень мало влияет на параметры двигателя. Поэтому специальная установка ротора относительно статора необязательна.
Как определить начала и концы фаз обмотки асинхронного двигателя
Напряжения сети и схемы статорных обмоток электродвигателя
Если в паспорте электродвигателя указано, например, 220/380 в, это означает, что электродвигатель может быть включен как в сеть 220 в (схема соединения обмоток – треугольник), так и в сеть 380 в (схема соединения обмоток – звезда). Статорные обмотки асинхронного электродвигателя имеют шесть концов.
По ГОСТу обмотки асинхронного двигателя имеют следующие обозначения: I фаза – С1 (начало), С4 (конец), II фаза – С2 (начало), С5 (конец), III фаза – С3 (начало), С6 (конец).
Рис. 1. Схема подключения обмоток асинхронного двигателя: а – в звезду, б – в треугольник, в – исполнение схем “звезда” и “треугольник” на доске зажимов.
Если в сети напряжения равно 380 В, то обмотки статора двигателя должны быть соединены по схеме “звезда”. В общую точку при этом собраны или все начала (С1, С2, С3), или все концы (С4, С5, С6). Напряжение 380 в приложено между концами обмоток АВ, ВС, СА. На каждой же фазе, то есть между точками О и А, О и В, О и С, напряжение будет в √ З раз меньше: 380/√ З = 220 В.
Если в сети напряжение 220 В (при системе напряжений 220/127 В, что в настоящее время, практически нигде не встречается) обмотки статора двигателя должны быть соединены по схеме “треугольник”.
В точках А, В и С соединяются начало (Н) предыдущей с концом (К) последующей обмотки и с фазой сети (рис. 1, б). Если предположить, что между точками А и В включена I фаза, между точками В и С – II, а между точками С и А – III фаза, то при схеме “треугольник” соединены: начало I (С1) с концом III (С6), начало II (С2) с концом I (С4) и начало III (С3) с концом II (С5).
У некоторых двигателей концы фаз обмотки выведены на доску зажимов. По ГОСТу, начала и концы обмоток выводят .в том порядке, как эго показано на рисунке 1, в.
Если теперь необходимо соединить обмотки двигателя по схеме “звезда”, зажимы, на которые выведены концы (или начала), замыкают между собой, а к зажимам двигателя, на которые выведены начала (или концы), присоединяют фазы сети.
При соединении обмоток двигателя в “треугольник” соединяют, зажимы по вертикали попарно и к перемычкам присоединяют фазы сети. Вертикальные перемычки соединяют начало I с концом III фазы, начало II с концом I фазы и начало III с концом II фазы.
При определении схемы соединения обмоток можно пользоваться следующей таблицей:
Напряжение, указанное в паспорте электродвигателя, В
Напряжение в сети, В
Определение согласованных выводов (начал и концов) фаз статорной обмотки.
На выводах статорных обмоток двигателя обычно имеются стандартные обозначения па металлических обжимающих кольцах. Однако эти обжимающие кольца теряются. Тогда возникает необходимость определить согласованные выводы. Это выполняют в такой последовательности.
Сначала при помощи контрольной лампы определяют пары выводов, принадлежащих отдельным фазным обмоткам (рис. 2).
Рис. 2 . Определение фазных обмоток при помощи контрольной лампы.
К зажиму сети 2 подключают один из шести выводов статорной обмотки двигателя, а к другому зажиму сети 3 подключают один конец контрольной лампы. Другим концом контрольной лампы поочередно касаются каждого из остальных пяти выводов статорных обмоток до тех пор, пока лампа не загорится. Если лампа загорелась, значит, два вывода, присоединенные к сети, принадлежат одной фазе.
Управление асинхронным двигателем
- Способы подключения асинхронного электродвигателя к сети питания:
- прямое подключение к сети питания
- подключение от устройства плавного пуска
- подключение от преобразователя частоты
Варианты подключения асинхронного электродвигателя с помощью магнитного пускателя (слева), устройства плавного пуска (посеридине) и частотного преобразователя (справа). Схемы представлены в упрощенном виде. FU1-FU9 — плавкие предохранители, KK1 — тепловое реле, KM1 — магнитный пускатель, L1-L3 — контакты для подключения к сети трехфазного переменного тока, M1-M3 — асинхронные электродвигатели, QF1-QF3 — автоматические выключатели, UZ1 — устройство плавного пуска, UZ2 — преобразователь частоты
Прямое подключение к сети питания
Использование магнитных пускателей позволяет управлять асинхронными электродвигателями путем непосредственного подключения двигателя к сети переменного тока.
С помощью магнитных пускателей можно реализовать схему:
- нереверсивного пуска: пуск и остановка;
- реверсивного пуска: пуск, остановка и реверс.
Использование теплового реле позволяет осуществить защиту электродвигателя от величин тока намного превышающих номинальное значение.
Нереверсивная схема
Реверсивная схема
Недостатком прямой коммутации обмоток асинхронного электродвигателя с сетью является наличие больших пусковых токов, во время запуска электродвигателя.
Плавный пуск асинхронного электродвигателя
В задачах, где не требуется регулировка скорости электродвигателя во время работы для уменьшения пусковых токов используется устройство плавного пуска.
Устройство плавного пуска защищает асинхронный электродвигатель от повреждений вызванных резким увеличением потребляемой энергии во время пуска путем ограничения пусковых токов. Устройство плавного пуска позволяет обеспечить плавный разгон и торможение асинхронного электродвигателя.
Устройство плавного пуска дешевле и компактнее частотного преобразователе. Применяется там, где регулировка скорости вращения и момента требуется только при запуске.
Частотное управление асинхронным электродвигателем
Для регулирования скорости вращения и момента асинхронного двигателя используют частотный преобразователь. Принцип действия частотного преобразователя основан на изменении частоты и напряжения переменного тока.
- Использование частотного преобразователя позволяет:
- уменьшить энергопротребление электродвигателя;
- управлять скоростью вращения электродвигателя (плавный запуск и остановка, регулировка скорости во время работы);
- избежать перегрузок электродвигателя и тем самым увеличить его срок службы.
Функциональная схема частотно-регулируемого привода
- В зависимости от функционала частотные преобразователи реализуют следующие методы регулирования асинхронным электродвигателем:
- скалярное управление;
- векторное управление.
Скалярное управление
является простым и дешевым в реализации, но имеет следующие недостатки — медленный отклик на изменение нагрузки и небольшой диапазон регулирования. Поэтому скалярное управление обычно используется в задачах, где нагрузка либо постоянна, либо изменяется по известному закону (например, управление вентиляторами).
Как определить начало и конец обмотки в двигателе.
В этой статье я расскажу способ, как определить начало и конец обмотки в асинхронном трёхфазном двигателе.
Когда вам может потребоваться данный материал? Только в том случае, если у вас имеется в коробке брно шесть проводов одинакового цвета и на них нет никаких обозначений. Или ваш двигатель был соединен треугольником, а вы хотите получить возможность соединить его звездой. Как это сделать я писал здесь . Чтобы проще было объяснять материал, сначала пройдемся по принятым маркировкам выводов обмоток двигателей.
§76. Асинхронный двигатель с короткозамкнутым ротором
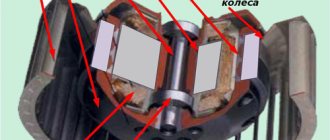
Асинхронный двигатель с короткозамкнутым ротором (рис. 249 и 250) состоит из следующих основных частей: статор с трехфазной обмоткой, ротор с короткозамкнутой обмоткой и остов. Обмотка ротора выполнена бесконтактной (она не соединена ни с какой внешней цепью), что определяет высокую надежность такого двигателя.
Магнитная система. Асинхронная машина в отличие от машины постоянного тока не имеет явно выраженных полюсов. Такую магнитную систему называют неявнополюсной. Число полюсов в машине определяется числом катушек в обмотке статора и схемой их соединения. В четырехполюсной машине (рис. 251) магнитная система состоит из четырех одинаковых ветвей, по каждой из которых проходит половина магнитного потока Фп одного полюса, в двухполюсной машине таких ветвей две, в шестиполюсной — шесть и т. д. Так как через все элементы магнитной системы проходит переменный магнитный поток, то не только ротор 1, но
Рис. 249. Асинхронный двигатель с короткозамкнутым ротором: 1 — остов; 2 — статор; 3 — ротор; 4 — стержни обмотки ротора; 5 — подшипниковый щит; 6 — вентиляционные лопатки ротора; 7 — вентилятор; 8 — коробка выводов
Рис. 250. Электрическая схема асинхронного двигателя с короткозамкнутым ротором (а) и его условное графическое изображение (б): 1 — статор; 2 — ротор
Рис.251. Магнитное поле четырехполюсной асинхронной машины
Рис. 252. Листы ротора (а) и статора (б)
Рис. 253. Пакет собранного статора (а) и статор с обмоткой (б)
и статор 2 выполняют из листов электротехнической стали (рис. 252), изолированных один от другого изоляционной лаковой пленкой, окалиной и пр. В результате этого уменьшается вредное действие вихревых токов, возникающих в стали статора и ротора при вращении магнитного поля. Листы статора и ротора имеют пазы открытой, полузакрытой или закрытой формы, в которых располагаются проводники соответствующих обмоток. В статоре чаще всего применяют полузакрытые пазы прямоугольной или овальной формы, в машинах большой мощности — открытые пазы прямоугольной формы.
Сердечник статора 1 (рис. 253, а) запрессовывают в литой остов 3 и укрепляют стопорными винтами. Сердечник ротора напрессовывают на вал ротора, который вращается в шариковых подшипниках, установленных в двух подшипниковых щитах. Воздушный зазор между статором и ротором имеет минимальный размер, допускаемый с точки зрения точности сборки и механической жесткости конструкции. В двигателях малой и средней мощности воздушный зазор обычно составляет несколько десятых миллиметра. Такой зазор обеспечивает уменьшение магнитного сопротивления магнитной цепи машины, а следовательно, и уменьшение намагничивающего тока, требуемого для создания в двигателе магнитного потока. Снижение намагничивающего тока позволяет повысить коэффициент мощности двигателя.
Обмотка статора. Она выполнена в виде ряда катушек из проволоки круглого или прямоугольного сечения. Проводники, находящиеся в пазах, соединяются, образуя ряд катушек 2 (рис. 253,б). Катушки разбивают на одинаковые группы по числу фаз, которые располагают симметрично вдоль окружности статора (рис. 254, а) или ротора. В каждой такой группе все катушки электрически соединяются, образуя одну фазу обмотки, т. е. отдельную электрическую цепь. При больших значениях фазного тока или при необходимости переключения отдельных катушек фазы могут иметь несколько параллельных ветвей. Простейшим элементом обмотки является виток (рис. 254,б), состоящий из двух проводников 1 и 2, размещенных в пазах, находящихся друг от друга на неко-
Рис. 254. Расположение катушек трехфазной обмотки на статоре асинхронного двигателя (а) и виток из двух проводников (б)
тором расстоянии у. Это расстояние приблизительно равно одному полюсному делению т, под которым понимают длину дуги, соответствующую одному полюсу.
Обычно витки, образованные проводниками, лежащими в одних и тех же пазах, объединяют в одну или две катушки. Иногда их называют секциями. Их укладывают таким образом, что в каждом пазу размещается одна сторона катушки или две стороны — одна над другой. В соответствии с этим различают одно- и двухслойные обмотки. Основным параметром, определяющим распределение обмотки по пазам, является число пазов q на полюс и фазу.
В обмотке статора двухполюсного двигателя (см. рис. 254, а) каждая фаза (А-Х; B-Y; C-Z) состоит из трех катушек, стороны которых расположены в трех смежных пазах, т. е. q = 3. Обычно q > 1, такая обмотка называется распределенной.
Наибольшее распространение получили двухслойные распределенные обмотки. Их секции 1 (рис. 255, а) укладывают в пазы 2 статора в два слоя. Проводники обмотки статора укрепляют в пазах текстолитовыми клиньями 5 (рис. 255,б), которые закладывают у головок зубцов.
Стенки паза покрывают листовым изоляционным материалом 4 (электрокартоном, лакотканью и пр.). Проводники, лежащие в пазах, соединяют друг с другом соответствующим образом с торцовых сторон машины. Соединяющие их провода называют лобовыми частями. Так как лобовые части не принимают участия в индуцировании э. д. с, их выполняют как можно короче.
Отдельные катушки обмотки статора могут соединяться «звездой» или «треугольником». Начала и концы обмоток каждой фазы выводят к шести зажимам двигателя.
Обмотка ротора. Обмотка ротора выполнена в виде беличьей клетки (рис. 256,а). Она сделана из медных или алюминиевых стержней, замкнутых накоротко с торцов двумя кольцами (рис. 256,б). Стержни этой обмотки вставляют в пазы ротора без какой-либо изоляции, так как напряжение в короткозамкну-
Рис. 255. Двухслойная обмотка статора асинхронного двигателя: 1 — секция; 2 — паз; 3 — проводник; 4 — изоляционный материал; 5 — клин; 6 — зубец
Рис. 256. Короткозамкнутый ротор: а — беличья клетка; б — ротор с беличьей клеткой из стержней; в — ротор с литой беличьей клеткой; 1 — короткозамыкающие кольца; 2— стержни; 3— вал; 4 — сердечник ротора; 5 — вентиляционные лопасти; 6 — стержни литой клетки
той обмотке ротора равно нулю. Пазы короткозамкнутого ротора обычно выполняют полузакрытыми, а в машинах малой мощности — закрытыми (паз имеет стальной ободок, отделяющий его от воздушного зазора). Такая форма паза позволяет хорошо укрепить проводники обмотки ротора, хотя и несколько увеличивает ее индуктивное сопротивление.
В двигателях мощностью до 100 кВт стержни беличьей клетки обычно получают путем заливки расплавленного алюминия в пазы сердечника ротора (рис. 256, в). Вместе со стержнями беличьей клетки отливают и соединяющие их торцовые короткозамыкающие кольца.
Для этой цели пригоден алюминий, так как он обладает малой плотностью, достаточно высокой электропроводностью и легко плавится.
Обычно двигатели имеют вентиляторы, насаженные на вал ротора. Они осуществляют принудительную вентиляцию нагретых частей машины (обмоток и стали статора и ротора), позволяя получить от двигателя большую мощность. В двигателях с короткозамкнутым ротором лопасти вентилятора часто отливают совместно с боковыми кольцами беличьей клетки (см. рис. 256, в).
Асинхронные двигатели с короткозамкнутым ротором просты по конструкции, надежны в эксплуатации. Их широко применяют для привода металлообрабатывающих станков и других устройств, которые начинают работать без нагрузки. Однако сравнительно малый пусковой момент у этих двигателей и большой пусковой ток не позволяют использовать их для привода таких машин и механизмов, которые должны пускаться в ход сразу под большой нагрузкой (с большим пусковым моментом). К таким машинам относятся грузоподъемные устройства, компрессоры и др.
Увеличить пусковой момент и уменьшить пусковой ток можно при выполнении беличьей клетки с повышенным активным сопротивлением. При этом двигатель будет иметь увеличенное скольжение и большие потери мощности в обмотке ротора. Такие двигатели называют двигателями с повышенным скольжением (обозначаются АС). Их можно использовать для привода машин, работающих сравнительно небольшое время. На э. п. с. переменного тока эти двигатели (со скольжением до 10%) применяют для привода компрессоров, которые работают периодически в течение коротких промежутков времени при уменьшении давления в воздушных резервуарах ниже определенного предела.
Двигатели с повышенным пусковым моментом. Короткозамкнутые асинхронные двигатели с повышенным пусковым моментом имеют специальную конструкцию ротора (обозначаются АП). К ним относятся двигатели с двойной беличьей клеткой и двигатели с глубокими пазами.
Ротор 3 (рис. 257,а) двигателя с двойной беличьей клеткой имеет две короткозамкнутые обмотки. Наружная клетка 1 является пусковой. Она обладает большим активным и малым реактивным сопротивлениями. Внутренняя клетка 2 является основной обмоткой ротора; она, наоборот, обладает незначительным активным и большим реактивным сопротивлениями. В начальный момент пуска ток проходит, главным образом, по наружной клетке, которая создает значительный вращающий момент. По мере увеличения частоты вращения ток переходит во внутреннюю клетку, и по окончании процесса пуска машина работает как обычный короткозамкнутый двигатель с одной (внутренней) клеткой. Вытеснение тока в наружную клетку в начальный момент пуска объясняется действием, э. д. с. самоиндукции, индуцируемой в проводниках ротора. Чем ниже расположен в пазу проводник, тем большим магнитным потоком рассеяния 6 он охватывается и тем большая э. д. с. самоиндукции в нем индуцируется (рис. 257, в), следовательно, тем большее он будет иметь индуктивное сопротивление.
Вытеснение тока в верхние проводники ротора сильно сказывается при неподвижном роторе, когда частота тока, индуцируемого в обеих клетках ротора, велика. При этом индуктивные
Рис. 257. Конструкция роторов асинхронных двигателей с повышенным пусковым моментом: с двойной беличьей клеткой (а), с глубокими пазами (б) и разрезы их пазов (в и г)
сопротивления обеих клеток значительно больше активных и ток распределяется между ними обратно пропорционально их индуктивным сопротивлениям, т. е. проходит в основном по наружной клетке с большим активным сопротивлением. По мере возрастания частоты вращения ротора частота тока в нем будет уменьшаться (вращающееся магнитное поле будут пересекать проводники ротора с меньшей частотой), и ток начнет проходить по обеим клеткам в соответствии с их активными сопротивлениями, т. е., главным образом, через внутреннюю клетку.
Таким образом, процесс пуска двигателя с двойной беличьей клеткой имеет сходство с процессом пуска асинхронного двигателя с фазным ротором, когда в начале пуска в цепь обмотки ротора вводится добавочное активное сопротивление (пусковой реостат), а по мере разгона это сопротивление выводится. Точно так же и в рассматриваемом двигателе ток в начале пуска проходит по наружной клетке с большим активным сопротивлением, а затем по мере разгона постепенно переходит во внутреннюю клетку с малым активным сопротивлением.
Для повышения активного сопротивления пусковой клетки стержни ее изготовляют из маргацовистой латуни или бронзы. Стержни рабочей клетки выполняют из меди, обладающей малым удельным сопротивлением, причем площадь поперечного сечения их больше, чем у пусковой клетки. В результате этого активное сопротивление пусковой клетки увеличивается в 4—5 раз по сравнению с рабочей. Между стержнями обеих клеток имеется узкая щель 5, размеры которой определяют индуктивность рабочей клетки. Двухклеточный двигатель на 20—30% дороже коротко-замкнутого двигателя обычной конструкции. Для упрощения технологии изготовления ротора двухклеточные двигатели небольшой и средней мощности выполняют с литой алюминиевой клеткой.
Действие двигателей с глубокими пазами (рис. 257, б) также основано на использовании явления вытеснения тока. В этих двигателях стержни 4 беличьей клетки выполнены в виде узких медных шин, заложенных в глубокие пазы ротора 3 (высота паза в 10— 12 раз больше его ширины). Нижние слои стержней, расположенные дальше от поверхности ротора, охватываются значительно большим числом магнитных линий потока рассеяния 6, чем верхние (рис. 257,г), поэтому они имеют во много раз большую индуктивность. В начале пуска в результате увеличенного индуктивного сопротивления нижних частей стержней ток проходит, главным образом, по их верхним частям. При этом используется только небольшая часть поперечного сечения каждого стержня, что приводит к увеличению его активного сопротивления, а следовательно, и к возрастанию активного сопротивления всей обмотки ротора.
При увеличении частоты вращения ротора вытеснение тока в верхние части стержней уменьшается (по той же причине, что и в двигателе с двойной беличьей клеткой), и после окончания пуска ток равномерно распределяется по площади их поперечного сечения.
Выводы асинхронного двигателя. Маркировка выводов асинхронного двигателя
Встречаются различные маркировки выводов обмоток двигателя. Отечественная маркировка от С1 до С6 и международная, которую вы видите на рисунке.
В наше время встречаются обе маркировки, но для «обучения» мы будем применять новые обозначения, как более наглядные. Ранее, я уже говорил, что начало и конец обмоток понятия абсолютно условные, главное условие, которое играет важную роль это такое соединение обмоток, когда магнитные потоки не направлены встречно. Если два одинаковых потока направить встречно, они как бы уничтожают друг друга. Нам же надо получить согласованное направление магнитных потоков. В двигателе находятся три обмотки. Грубо говоря, двигатель, это трансформатор с тремя обмотками и сердечником в виде статора. Таким образом, обмотки в двигателе связывает магнитный поток, который протекает по статору, а его создает ток, который протекает по обмоткам. Ротор – это лишь приятная «вкусняшка», наличие которой позволяет получить из электрической энергии механическую.
Выполнение работы. Маркировка выводов обмоток статора
Маркировка выводов обмоток статора
Определение одноименных выводов фаз обмоток статора и изучение пуска производятся на асинхронном трехфазном микродвигателе с короткозамкнутым ротором.
Работа начинается с определения принадлежности выводных концов к одной фазе. Для этого необходимо найти цепь каждой фазы при помощи вольтметра, включенного последовательно с предполагаемыми выводами фазы (рис.10). Отклонение вольтметра до величины напряжения сети указывает на то, что выводы определены правильно. После этого приступают к определению одноименных выводов (начал и концов) фазовых обмоток статора. Правильная маркировка одноименных выводов является необходимым условием для получения кругового вращающегося магнитного поля, необходимого для нормальной работы двигателя. Начала фаз обозначаются: а соответствующие им концы: ; у современных асинхронных машин начала фаз маркируются по-другому: начала фаз , а соответствующие им концы
.
Для определения одноименных выводов фазных обмоток статора необходимо одну из фаз (например, ) включить в сеть переменного тока, а к двум другим последовательно соединенным (рис.11) фазам включить вольтметр. При соединении этих фаз разноименными выводами (например, по схеме ), вольтметр подключенный к выводам и , покажет некоторое напряжение (ив условиях лаборатории оно незначительно – до 10 В). Если вместе соединены одинаковые выводы (например, по схеме ), то напряжение между точками и будет равно нулю.
Промаркировав две соединенные последовательно фазы, разъединяют их. Затем включают на сеть одну из уже маркированных фаз (например, ), а другую маркированную фазу ( ) соединяют последовательно с первой фазой ( ). Внешние выводы этих соединенных последовательно обмоток подключают к вольтметру. По показаниям вольтметра, с учетом уже принятой маркировки, определяют начало и конец первой фазы ( ).
Пуск двигателя переключением обмоток статора
со звезды в треугольник
Для пуска двигателя переключением собирается схема по рис.12 без амперметра. Подключив двигатель к сети, необходимо убедиться, что он вращается нормально. Затем подключается амперметр для измерения линейного пускового тока (см. рис.12).
Как известно из теории, линейный пусковой ток при включении обмоток статора на «звезду» в три раза меньше, чем при прямом включении на «треугольник». Однако из-за инерционности подвижной системы прибора, при измерениях, соотношение между токами будет несколько отличаться от действительного.
Реверсирование асинхронного двигателя производится переключением линейных проводов любых двух фаз. Следует проверить это на опыте.
Снятие рабочих характеристик
Рабочими характеристиками называются зависимости потребляемой мощности, тока статора, частоты вращения, скольжения, момента вращения, КПД и от полезной мощности при постоянных значениях напряжения на зажимах статора и частоты:
при и .
Для снятия рабочих характеристик собирают схему рис.13. Испытательный стенд имеет двигатель с маркированными выводами фаз обмотки статора, электромагнитный тормоз для осуществления нагрузки, измеритель частоты вращения, комплект измерительных приборов.
Схемой испытания двигателя предусмотрено непосредственное измерение частоты вращения. Измерение осуществляется следующим образом. На валу двигателя установлен механический прерыватель (рис.13), который контактом МП прерывает электрическую цепь питания обмотки счетчика оборотов при каждом обороте вала двигателя.
Частота вращения ротора двигателя определяется по формуле, об/мин,
где число импульсов, которое показывает счетчик;
время, в течение которого производится отсчет по электросекундомеру (берется при однократном нажатии кнопки секундомера ориентировочно 10с и фиксируется с точностью до сотых долей секунды);
учитывает ошибку, возможную в начале отсчета.
Рабочие характеристики снимают при номинальном (обмотки статора соединены в треугольник) и пониженном (обмотки статора соединены в звезду) напряжениях на фазах обмотки статора двигателя, нагружая его электромагнитным тормозом от режима холостого хода до значений линейных токов, превышающих номинальные на 20- 30%. Данные опыта заносят в табл.13.
Таблица 13
| Наблюдения | Вычисления | ||||||||||
| ¦2 | |||||||||||
| В | А | Вт | Н×м | имп | с | об/мин. | % | Гц | — | Вт | % |
Маркировка выводов обмоток статора
Определение одноименных выводов фаз обмоток статора и изучение пуска производятся на асинхронном трехфазном микродвигателе с короткозамкнутым ротором.
Работа начинается с определения принадлежности выводных концов к одной фазе. Для этого необходимо найти цепь каждой фазы при помощи вольтметра, включенного последовательно с предполагаемыми выводами фазы (рис.10). Отклонение вольтметра до величины напряжения сети указывает на то, что выводы определены правильно. После этого приступают к определению одноименных выводов (начал и концов) фазовых обмоток статора. Правильная маркировка одноименных выводов является необходимым условием для получения кругового вращающегося магнитного поля, необходимого для нормальной работы двигателя. Начала фаз обозначаются: а соответствующие им концы: ; у современных асинхронных машин начала фаз маркируются по-другому: начала фаз , а соответствующие им концы .
Для определения одноименных выводов фазных обмоток статора необходимо одну из фаз (например, ) включить в сеть переменного тока, а к двум другим последовательно соединенным (рис.11) фазам включить вольтметр. При соединении этих фаз разноименными выводами (например, по схеме ), вольтметр подключенный к выводам и , покажет некоторое напряжение (ив условиях лаборатории оно незначительно – до 10 В). Если вместе соединены одинаковые выводы (например, по схеме ), то напряжение между точками и будет равно нулю.
Промаркировав две соединенные последовательно фазы, разъединяют их. Затем включают на сеть одну из уже маркированных фаз (например, ), а другую маркированную фазу ( ) соединяют последовательно с первой фазой ( ). Внешние выводы этих соединенных последовательно обмоток подключают к вольтметру. По показаниям вольтметра, с учетом уже принятой маркировки, определяют начало и конец первой фазы ( ).
Пуск двигателя переключением обмоток статора
со звезды в треугольник
Для пуска двигателя переключением собирается схема по рис.12 без амперметра. Подключив двигатель к сети, необходимо убедиться, что он вращается нормально. Затем подключается амперметр для измерения линейного пускового тока (см. рис.12).
Как известно из теории, линейный пусковой ток при включении обмоток статора на «звезду» в три раза меньше, чем при прямом включении на «треугольник». Однако из-за инерционности подвижной системы прибора, при измерениях, соотношение между токами будет несколько отличаться от действительного.
Реверсирование асинхронного двигателя производится переключением линейных проводов любых двух фаз. Следует проверить это на опыте.
Снятие рабочих характеристик
Рабочими характеристиками называются зависимости потребляемой мощности, тока статора, частоты вращения, скольжения, момента вращения, КПД и от полезной мощности при постоянных значениях напряжения на зажимах статора и частоты:
при и .
Для снятия рабочих характеристик собирают схему рис.13. Испытательный стенд имеет двигатель с маркированными выводами фаз обмотки статора, электромагнитный тормоз для осуществления нагрузки, измеритель частоты вращения, комплект измерительных приборов.
Схемой испытания двигателя предусмотрено непосредственное измерение частоты вращения. Измерение осуществляется следующим образом. На валу двигателя установлен механический прерыватель (рис.13), который контактом МП прерывает электрическую цепь питания обмотки счетчика оборотов при каждом обороте вала двигателя.
Частота вращения ротора двигателя определяется по формуле, об/мин,
где число импульсов, которое показывает счетчик;
время, в течение которого производится отсчет по электросекундомеру (берется при однократном нажатии кнопки секундомера ориентировочно 10с и фиксируется с точностью до сотых долей секунды);
учитывает ошибку, возможную в начале отсчета.
Рабочие характеристики снимают при номинальном (обмотки статора соединены в треугольник) и пониженном (обмотки статора соединены в звезду) напряжениях на фазах обмотки статора двигателя, нагружая его электромагнитным тормозом от режима холостого хода до значений линейных токов, превышающих номинальные на 20- 30%. Данные опыта заносят в табл.13.
Таблица 13
| Наблюдения | Вычисления | ||||||||||
| ¦2 | |||||||||||
| В | А | Вт | Н×м | имп | с | об/мин. | % | Гц | — | Вт | % |
Начало и конец обмоток электродвигателя
Ну что ж, приступим. Прежде, чем начинать процедуру, вам нужно подготовиться. Для этого вам потребуются:
- мультиметр или лампа накаливания (предпочтительнее, конечно же, мультиметр)
- маркеры для проводов
- знание техники безопасности , поскольку вы будете работать с опасным напряжением
- обычная сетевая вилка с проводом
- что-то, чем вы будете соединять провода, когда приступите к поиску выводов обмотки
- ну и материал данной статьи.
В качестве маркеров можно использовать кембрики, бумагу с резинками, цветную изоленту и обычные перманентные маркеры, в общем, что угодно, что позволит вам промаркировать выводы. Вам потребуется шесть маркеров, на которых вы напишете обозначения начала и концов обмоток.
Первым делом нужно определить обмотки двигателя
Названия обмоток тоже абсолютно условны. Хотя, если принимать в расчёт такое понятие, как фазировка, то правильное включение дает точное представление о том, в какую сторону будет вращаться вал двигателя и не более того. Выставляете мультиметр в режим прозвонки , один щуп прикладываете к любому из шести проводов, вторым щупом находите конец, который будет прозваниваться. И эту пару звонящихся концов маркируете. Пусть это будут U1 и U2. Остается четыре конца. Повторяете операцию и еще одну пару снова маркируете. Пусть это будут V1 и V2. Осталась еще пара концов, их проверяете на всякий случай, чтобы быть уверенными, что обмотка в исправном состоянии и тоже маркируете оставшимися маркерами W1 и W2. Теперь у вас есть три обмотки и вы знаете их выводы. Но не знаете, где начало, а где конец каждой обмотки. Другими словами, вы не знаете, как направлены магнитные потоки этих обмоток согласно имеющейся маркировке, поскольку она сейчас носит случайный характер.